融合近红外光谱的煤岩界面分布感知研究
2022-08-13杨恩王世博宣统
杨恩, 王世博, 宣统
(1. 江苏建筑职业技术学院 智能制造学院,江苏 徐州 221116;2. 中国矿业大学 机电工程学院,江苏 徐州 221116;3. 上海空间电源研究所,上海 200245)
0 引言
在井下煤炭长壁综采工作面开采中,采煤机对开采环境的智能精准感知是实现无人工作面和智能化开采的关键基础问题之一,也是实现采煤机机器人化的核心。近10 a来,尽管国内外在无人化、智能化工作面方面取得了一些技术成果,但在以煤岩界面识别为主要代表的开采环境智能精准感知方面缺乏新原理和新技术的突破[1-3]。目前煤岩识别主要依据煤岩多种理化性状进行识别区分,相关研究成果为综采工作面煤壁煤岩界面探测关键工程应用奠定了重要基础。文献[1]针对现有煤岩界面探测识别技术研究现状进行了深入分析,归纳出采前透视、采中触觉、采后视觉三大类具有重要应用指导意义的分类方法。为解决煤岩界面识别这一行业难题,亟需从应用层面上探索综采工作面煤岩界面分布感知的新方法。
受地物高光谱遥感和岩矿地物反射光谱探测启发[4-6],笔者研究了我国典型煤和煤系岩石近红外波段(1 000~2 500 nm)反射光谱特征,获得了煤岩物质成分与光谱特征的关联规律[7-8],构建了基于光谱特征参量提取和波形匹配的煤岩识别算法[9-10],提出了基于煤岩光谱反射率与灰分产率相关性的煤岩识别方法[11],煤岩整体识别率达到90%以上。该方法根据煤岩本质物质属性不同所引起的反射光谱特征差异进行煤岩区分,识别精度高,且单条光谱采集识别总时间达毫秒级,具有较好的实时性,验证了反射光谱技术用于煤岩识别的可能性,为煤岩界面反射光谱识别的工程应用研究奠定了理论基础。
近红外波段光谱探测分析具有快速、低成本的优势[12-14],可针对原位物质进行非破坏精确探测识别,已在矿物、岩石、煤炭等地物双向反射光谱探测领域得到一定的研究[15-19]。地物近红外双向反射即矿物、岩石、煤炭等天然地物表面介于理想漫反射朗伯面和理想镜面之间,表现出近红外波段反射率空间探测分布方向性特征,尤其是反射前向热点和入射后向热点,即前向反射区域和后向反射区域[17-19],如图1所示(λ为入射波长)。

图1 典型煤岩双向反射分布Fig. 1 Bidirectional reflectance of typical types of coal and rock
煤岩后向反射区域即反射率探测方向与光源入射方向位于同一直线上,其相对较大的近红外波段反射率使得煤岩在后向反射区域方向具有较好的光谱探测性[19],为采集镜头-照射光源一体式小型反射光谱探头传感器的研制及其从不同方向探测识别煤岩界面位置分布提供了启示。
针对目前广泛应用的记忆截割方法在后续截割循环中难以实现煤岩界面自主判定的问题[20],为实现综采工作面采煤机准确、快速感知滚筒截割后的煤壁煤岩界面分布,以准确调节下一个截割循环采煤机滚筒截割位置,本文将近红外反射光谱技术用于煤岩界面分布感知。搭建了模拟煤壁煤岩界面台架,设计了安装于采煤机机身的光纤准直镜-卤钨聚光光源一体式光谱探头,在采煤机3种行走速度和光谱探头4种扫描角速度下,测定了煤岩界面附近煤岩的近红外波段(1 000~2 500 nm)后向反射光谱曲线;对于光谱探头在煤壁上每条扫描轨迹中采集的所有反射光谱,选取2 150~2 250 nm差异性特征波段,基于余弦距离模糊C均值聚类(Cosine-distance Fuzzy C-means, CFCM)进行煤岩反射光谱无监督识别,基于高度差权重法和扫描轨迹方程确定了煤岩界面点理论预测位置。
1 煤壁煤岩反射光谱采集实验
在实验室搭建煤壁煤岩反射光谱采集实验平台,如图2所示。
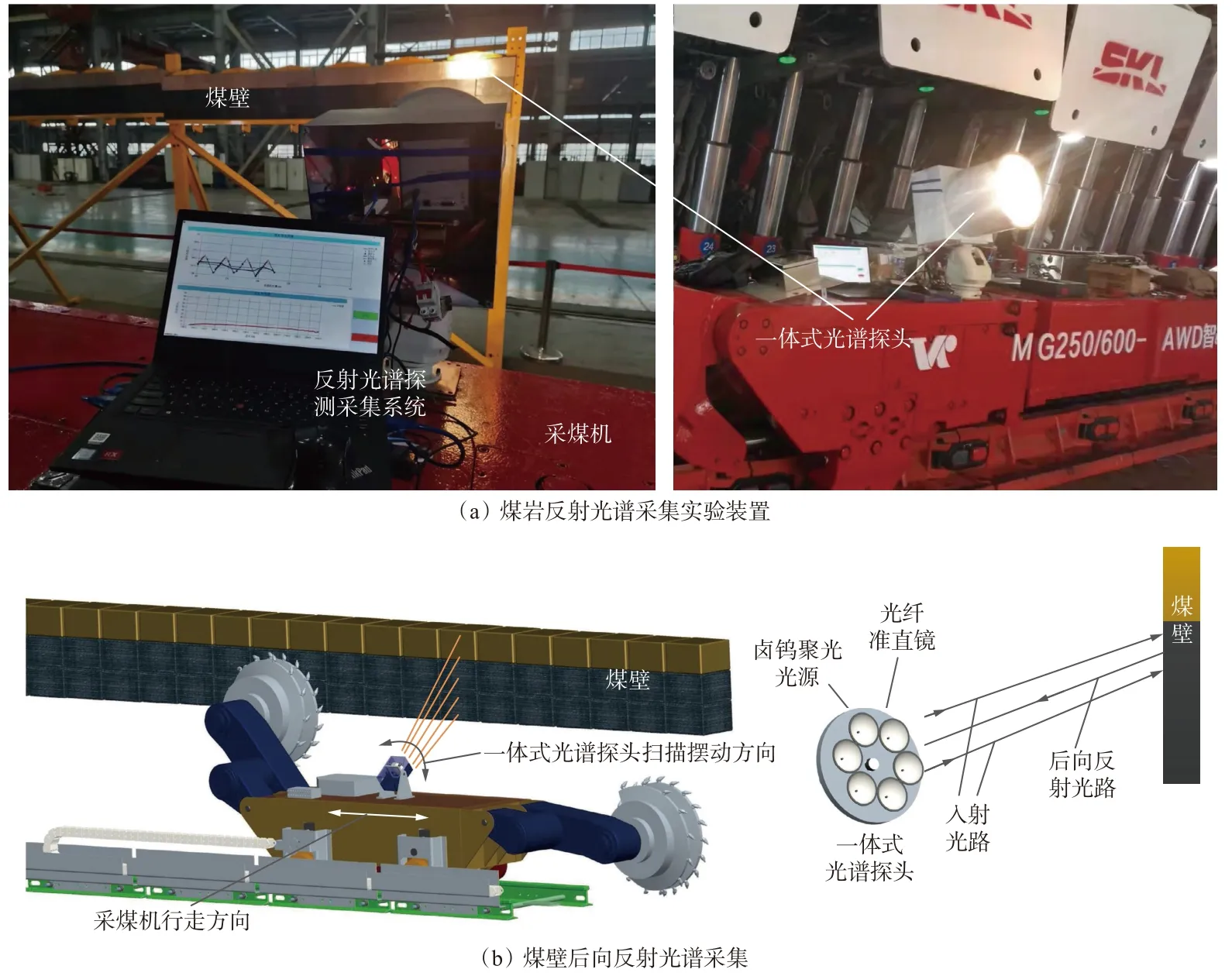
图2 煤岩反射光谱采集实验平台Fig. 2 Experimental platform of coal-rock reflectance spectra detection
采用气煤、炭质泥页岩10 cm×10 cm×20 cm均匀切割块样搭建模拟煤壁煤岩界面台架。整个台架由多个长约2.5 m的台架拼接而成,每个台架煤壁上层为10 cm厚的岩,下层为20 cm厚的煤,煤层块样下表面放于台架台面,台架台面距地面高度为2 m。为简化分析,所搭建的煤岩界面整体在同一平面,即实际煤岩界面距地面高度为220 cm。
基于煤岩地物后向反射区域热点特征,设计了光纤准直镜-卤钨聚光光源一体式光谱探头,整体采用10 mm中小口径SMA905光纤准直镜,6个100 W卤钨聚光光源围绕光纤准直镜布置。光谱探头通过旋转扫描平台安装于采煤机机身,随旋转扫描平台实现上下旋转扫描,同时随采煤机行走实现水平运动,进而实现旋转扫描和水平复合运动下对模拟煤壁煤岩进行多角度光线照射和反射光谱采集。在实验过程中,为有效模拟前滚筒采后煤壁表面与采煤机的相对位置,在保证采煤机行走安全的前提下,前滚筒尽可能靠近模拟煤壁。另外,为增强所采集反射光谱的信噪比,光谱探头布置于采煤机机身靠近煤壁一侧,其旋转中心与模拟煤壁表面水平距离约为95 cm。
采用AvaSpec-NIR512-2.5-HSC-EVO型近红外光纤光谱仪采集近红外反射光谱,波段设定为1 000~2 500 nm。光谱仪通过石英光纤连接一体式光谱探头,计算机控制光谱仪与光谱探头旋转扫描平台运动,组建反射光谱探测采集系统。为使近红外反射光谱具有较高的信噪比,设定光谱仪低噪声模式下最长积分时间为0.1 s。根据采煤机常见负载和空载状态行走速度,设定采煤机0,3,7 m/min 3种行走速度,每种行走速度下设定光谱探头3,4,5,6 °/s 4种扫描角速度,测定12种运动状态下模拟煤壁煤岩界面附近煤岩的近红外后向反射光谱曲线。
2 煤壁煤岩界面分布计算方法
2.1 煤壁煤岩光谱扫描轨迹方程
光纤准直镜-卤钨聚光光源一体式光谱探头从任意方向探测物体时,光源照射入射光路与光纤准直镜探测后向反射光路基本位于同一直线,即探测角θo近似等于入射角θi,其旋转扫描模拟煤壁过程横向视图如图3所示。设光谱探头向上及向下均以角速度ω运动,光谱探头距地面垂直距离为h0,距煤壁表面水平距离为d0,与模拟煤壁底面、顶面垂直距离分别为hmin,hmax,探测煤壁最小、最大入射角分别为θimin,θimax,则探测摆角范围(即最大、最小入射角夹角)为θimax-θimin。设煤壁表面探测点与光谱探头垂直距离为h,则与最低入射光线夹角为θi-θimin,由图3中几何关系可知


图3 光谱探头探测模拟煤壁横向视图Fig. 3 Transverse view of spectrum detector detecting simulated coal wall
面向煤壁观测,以采煤机带动旋转扫描平台及光谱探头向右侧以速度v匀速直线运动为例,光谱探头向上和向下以角速度ω运动时,其在煤壁上的探测点所形成的复合运动轨迹曲线分别如图4中轨迹1、轨迹2所示。
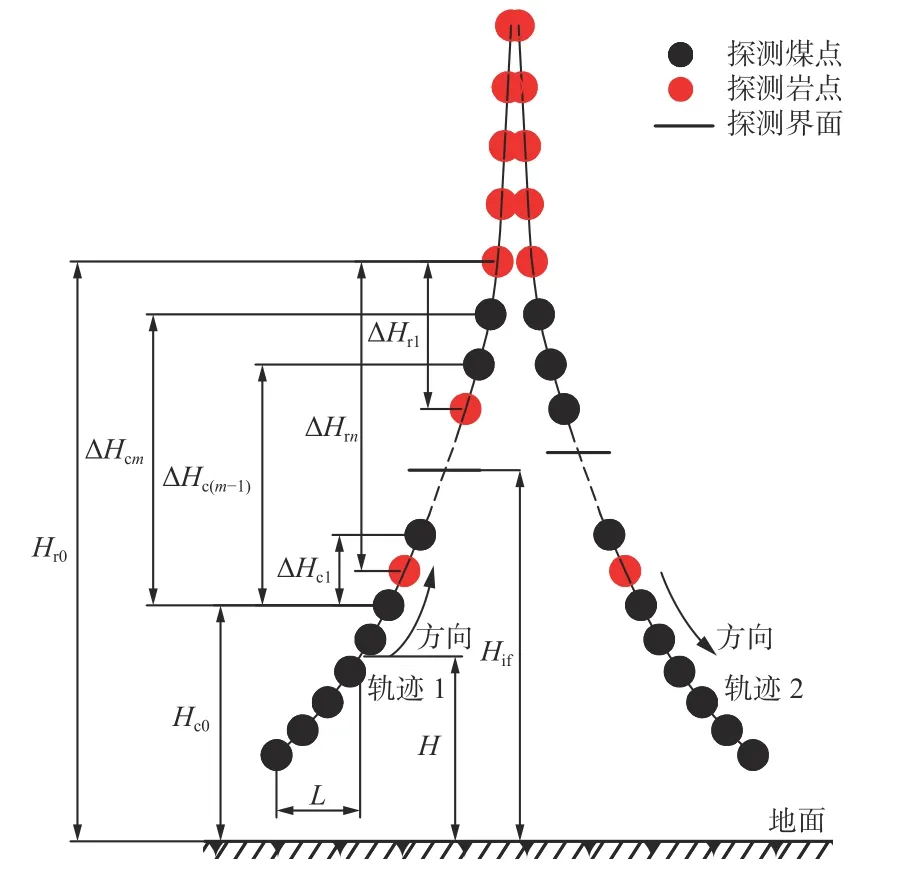
图4 光谱探头煤壁扫描轨迹Fig. 4 Scanning trajectories on the coal wall by spectrum detector
对于轨迹1,设轨迹上任意一点距地面垂直距离为H,与最低点采样时刻间隔时间为t,采煤机向右行走距离为L,结合图3可知

由式(1)-式(4)可得

轨迹2与轨迹1对称,扫描所用时间相等,二者扫描时间之和为1个扫描周期T,则

1个扫描周期内采煤机向右行走距离为LT,则

对于轨迹2,由式(5)、式(7)可得

轨迹1,2均为周期函数曲线,由式(5)、式(8)可得煤壁煤岩光谱扫描轨迹方程:

式中N∈N。
在光谱探头对煤壁煤岩界面探测过程中,近红外光谱仪低噪声模式最长积分时间下每0.1 s采集1次光谱数据,反射光谱探测采集系统对光谱数据进行识别,判定煤岩类型。图4中,光谱探头煤壁扫描轨迹上的圆点为光谱数据获取时光谱探头所对准位置,黑、红颜色分别为反射光谱探测采集系统对光谱数据的煤、岩识别判定结果,根据判定结果位置计算轨迹上煤岩界面位置。
2.2 扫描轨迹煤岩无监督识别
煤岩反射光谱数据识别方法主要包括有监督识别和无监督识别。反射光谱有监督识别主要是指与光谱数据库等标准或已知光谱数据匹配的方法[9-11];反射光谱无监督识别主要是指对采集到的光谱数据进行自主聚类分类的方法[21-23]。与反射光谱有监督识别方法相比,相关改进型反射光谱无监督识别方法具有自适应性强、计算量小、实时性好的优势[21]。针对不同探测角度煤岩反射光谱的无监督识别,文献[21]对常规模糊C均值聚类(Fuzzy C-means,FCM)进行了聚类距离改进研究,提出了CFCM,经对不同类型组别煤岩反射光谱数据进行识别和结果分析,得出CFCM对各类煤岩组合在整体识别率、迭代次数、总耗时方面具有较好效果。因此,本文采用CFCM作为反射光谱数据识别方法。
为解决常规欧氏距离FCM用于反射光谱数据无监督识别时常产生较大误差的问题[21-22],CFCM受反射光谱曲线相似性匹配分析常采用的光谱向量夹角余弦启发,采用余弦距离代替欧氏距离。设图4中任意一条轨迹上各圆点所对应反射光谱某特征波段光谱数据向量xi(i=1, 2, …,P,P为每条轨迹上采集光谱数)所组成的光谱数据矩阵为X=[x1,x2, …,xP],每次迭代煤、岩2个类别同维向量聚类中心分别为y1,y2,每次迭代xi属于第j(j=1, 2)类的隶属度为uij,则xi与yj的余弦距离为

其中:
式中:Q为该特征波段光谱数据向量维数;xis,yjs分别为xi,yj的第s维元素。
CFCM每次迭代所得隶属度uij和聚类损失J分别为

式中k为加权指数。
下次迭代聚类中心为
以此迭代计算,当聚类损失与前1次计算值之差的绝对值小于给定阈值ε时,取当前迭代所得2×P维隶属度矩阵U=[uij]T判定所对应光谱数据的煤岩类别。
根据文献[21]结果分析,CFCM对气煤-泥岩煤岩类型2 150~2 400 nm特征波段内单条光谱数据无监督识别平均耗时在毫秒级,因此本文选取其最优加权指数k=2.0,阈值ε=0.000 01。
2.3 扫描轨迹上煤岩界面位置计算
因采煤机带动旋转扫描平台及光谱探头向右侧以速度v匀速直线运动,光谱探头向上和向下以均匀角速度ω摆角运动,所以基于光谱仪积分时间和式(9),可计算确定光谱探头煤壁扫描轨迹上光谱数据获取时光谱探头所对准各圆点位置。同时,基于CFCM无监督识别方法,可确定各圆点所对应煤岩类型,从而确定图4中每条轨迹黑、红色圆点所代表的煤、岩探测位置分布。
以图4中轨迹1为例,从轨迹1最下侧的探测煤点向上至第1个探测岩点,设该探测岩点前的探测煤点距离地面高度为Hc0,从轨迹1最上侧的探测岩点向下至第1个探测煤点,设该探测煤点前的探测岩点距离地面高度为Hr0。当这2个探测煤岩点之间无探测煤岩点时,煤岩界面高度Hif取Hc0,Hr0均值,即

当高度为Hc0,Hr0的2个探测煤岩点之间有交叉分布探测煤岩点时,如图4中轨迹1,探测煤岩位置未呈现煤岩各自集中分布现象,而是部分交叉分布,则采用高度差权重法计算煤岩界面高度。设高度为Hc0,Hr0的探测煤岩点之间交叉分布的探测煤岩点中探测煤点数为m,探测岩点数为n,各探测煤点高度与Hc0差值分别为ΔHc1,ΔHc2,…,ΔHcm,Hr0与各探测岩点高度差值分别为ΔHr1,ΔHr2,…,ΔHrn,则采用高度差权重法计算的煤岩界面高度为

同理可得轨迹2中煤岩界面高度。联合式(15)、式(16),以及式(9)的反函数,可计算出各扫描轨迹上煤岩界面高度对应的横坐标,即可确定各条光谱探头煤壁扫描轨迹上的煤岩界面点坐标。连接各煤岩界面点所得的折线可近似作为煤壁煤岩界面位置。
3 采煤机和光谱探头运动状态下煤岩界面探测结果
3.1 采煤机静止状态
采煤机静止状态(v=0)下,每隔25 cm取台架煤壁共9处不同位置,光谱探头在每处位置以3,4,5,6 °/s 4种扫描角速度采集煤壁近红外后向反射光谱,并进行煤岩界面位置判定。
台架煤壁左起第1处位置各扫描角速度下煤岩代表性近红外后向反射光谱如图5所示。

图5 采煤机静止(v=0)时光谱探头各扫描角速度下煤岩代表性近红外后向反射光谱Fig. 5 Representative near-infrared reflectance spectra in the backward direction of coal and rock under each scanning angular velocity of spectrum detector when the shearer is stationary(v=0)
从图5可看出,采煤机静止时光谱探头各扫描角速度下,随着探测入射角θi增大,气煤、炭质泥页岩近红外波段(1 000~2 500 nm)后向反射光谱曲线整体均呈下降趋势;随着光谱探头扫描角速度ω增大,煤岩后向反射光谱曲线整体均趋于平缓。同时,在光谱探头各扫描角速度下,煤岩后向反射光谱曲线均具有明显的差异性吸收谷谱带,主要表现在炭质泥页岩在1 400,1 900 nm附近的H2O振动吸收谱带,以及2 200 nm附近黏土矿物的Al-OH振动吸收谱带[8]。由于煤中水分和外界水分也可使煤在1 400,1 900 nm附近产生较为明显的吸收谷谱带[7-8],所以选取2 200 nm附近2 150~2 250 nm波段作为煤岩识别特征波段。
采煤机静止时光谱探头各扫描角速度下,对于每条扫描轨迹上获得的2 150~2 250 nm特征波段内所有反射光谱数据进行CFCM无监督识别。针对煤岩探测结果,采用式(15)、式(16)计算轨迹上的煤岩界面点坐标,连接9条轨迹上各自煤岩界面点,得到煤壁煤岩界面位置预测折线,如图6所示。可看出采煤机静止时,在光谱探头各扫描角速度下,预测折线所表示的探测煤岩界面与实际煤岩界面吻合性较好,其中光谱探头3,4,5 °/s 3种扫描角速度下的煤岩界面探测结果整体优于6 °/s时探测结果。
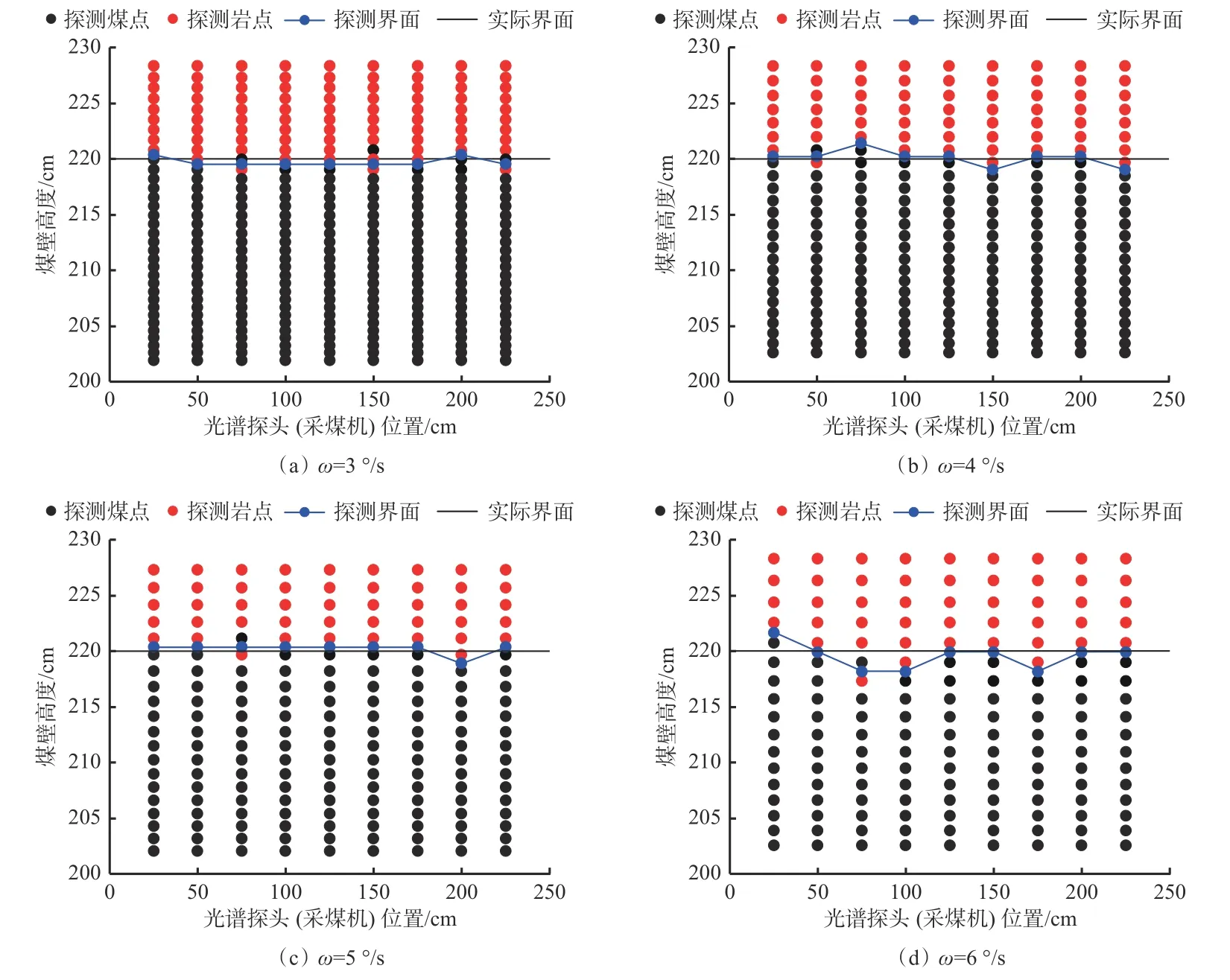
图6 采煤机静止(v=0)时光谱探头各扫描角速度下煤岩界面探测结果Fig. 6 Detection results of coal-rock interface under each scanning angular velocity of spectrum detector when the shearer is stationary(v=0)
3.2 采煤机行走状态
采煤机行走速度v=3,7 m/min时,光谱探头以3,4,5,6 °/s 4种角速度进行上下扫描运动,采集煤壁近红外后向反射光谱并进行煤岩界面位置判定。采煤机行走速度v=3,7 m/min时,台架煤壁左起第1条向上扫描轨迹在各扫描速度下的煤岩代表性近红外后向反射光谱分别如图7、图8所示。在光谱探头每段扫描轨迹上对2 150~2 250 nm特征波段光谱数据进行CFCM无监督识别及煤岩界面位置计算,得到煤壁煤岩界面位置预测折线,如图9、图10所示。
从图7、图8可看出,采煤机处于行走状态时,在光谱探头各扫描角速度下,随着探测入射角增大,气煤、炭质泥页岩近红外波段(1 000~2 500 nm)后向反射光谱曲线整体均呈下降趋势。相同采煤机行走速度下,随着光谱探头扫描角速度增大,煤岩反射光谱曲线整体均趋于平缓。综合图5、图7、图8可知,相同光谱探头扫描角速度下,随着采煤机行走速度增大,煤岩反射光谱曲线整体均趋于平缓。同时,采煤机处于行走状态时,在光谱探头各扫描角速度下,煤岩反射光谱曲线在1 400,1 900,2 200 nm附近均具有明显的差异性吸收谷谱带。

图7 采煤机以3 m/s速度行走时光谱探头各扫描角速度下煤岩代表性近红外后向反射光谱Fig. 7 Representative near-infrared reflectance spectra in the backward direction of coal and rock under each scanning angular velocity of spectrum detector when the shearer moves at 3 m/s

图8 采煤机以7 m/s速度行走时光谱探头各扫描角速度下煤岩代表性近红外后向反射光谱Fig. 8 Representative near-infrared reflectance spectra in the backward direction of coal and rock under each scanning angular velocity of spectrum detector when the shearer moves at 7 m/s
从图9、图10可看出,采煤机处于运动状态时,在光谱探头各扫描角速度下,预测折线所表示的探测煤岩界面与实际煤岩界面吻合性较好,其中采煤机行走速度v=3 m/min时,光谱探头3,5 °/s 2种扫描角速度下煤岩界面探测结果整体优于4,6 °/s时的探测结果;采煤机行走速度v=7 m/min时,光谱探头3,4,5 °/s 3种扫描角速度下的煤岩界面探测结果整体优于6 °/s时的探测结果。
3.3 煤岩界面分布探测结果评价
为比较采煤机和光谱探头各运动状态下煤岩界面探测结果,采用探测煤岩界面高度与实际高度(220 cm)的均方根误差(Root Mean Square Error,RMSE)进行探测结果评价。定义RMES为

式中:M为每种运动状态下扫描轨迹段数;Hifr为每段扫描轨迹中煤岩界面点高度。
图6、图9、图10中采煤机和光谱探头各运动状态下煤岩界面点探测高度与实际高度的RMSE如图11所示。

图9 采煤机以3 m/s速度行走时光谱探头各扫描角速度下煤岩界面探测结果Fig. 9 Detection results of coal-rock interface under each scanning angular velocity of spectrum detector when the shearer moves at 3 m/s

图10 采煤机以7 m/s速度行走时光谱探头各扫描角速度下煤岩界面探测结果Fig. 10 Detection results of coal-rock interface under each scanning angular velocity of spectrum detector when the shearer moves at 7 m/s
由图11可知,采煤机静止及行走速度v=3,7 m/min时,光谱探头3,4,5 °/s 3种扫描角速度下煤岩界面点探测结果的RMSE均小于6 °/s时,且均不超过1.5 cm,探测效果较好;采煤机静止及行走速度v=3 m/min时,光谱探头6 °/s扫描角速度下煤岩界面点探测结果的RMSE均不超过2 cm,探测效果较好。可见,采用反射光谱探测采集系统联合CFCM、高度差权重法、煤壁扫描轨迹方程,能够有效实现采煤机和光谱探头运动状态下煤岩界面分布的实时精确感知。

图11 采煤机各运动状态下煤岩界面分布探测结果评价Fig. 11 Evaluation of detection results of coal-rock interface distribution under each movement state of the shearer
4 结论
(1) 在采煤机静止及行走速度v=3,7 m/min状态下,光纤准直镜-卤钨聚光光源一体式光谱探头扫描角速度为3,4,5,6 °/s时,所采集气煤、炭质泥页岩近红外波段(1 000~2 500 nm)后向反射光谱均具有1 400,1 900,2 200 nm附近明显的差异性吸收谷谱带,且随着探测入射角增大,反射光谱曲线均呈下降趋势。
(2) 同一采煤机行走速度下,随着光谱探头扫描角速度增大,以及同一光谱探头扫描角速度下,随着采煤机行走速度增大,反射光谱曲线整体均趋于平缓。
(3) 基于光谱探头的反射光谱探测采集系统融合CFCM、高度差权重法、煤壁扫描轨迹方程,可实现采煤机和光谱探头运动状态下煤岩界面分布的快速精确识别,其中光谱探头扫描角速度为3,4,5 °/s时煤岩界面点的识别效果整体较好。
(4) 基于煤岩反射光谱差异性特征谱带,建立采煤机运动状态下反射光谱探测采集系统及煤岩界面分布识别方法,为近红外反射光谱技术应用于煤岩界面分布的精确高效感知提供了理论参考。
