基于梯度下降搜索法的IPMSM最大转矩电流比控制
2022-08-12杨宇健赵世伟杨向宇
杨宇健,赵世伟,杨向宇
(华南理工大学 电力学院,广州 510640)
0 引 言
风机、水泵广泛应用于生产生活的各个领域,其动力源大部分是异步电机,电能利用率较低。相较于传统的异步电机,内置式永磁同步电机(以下简称IPMSM) 具有效率高、结构简单、体积小等优点,在该领域有广泛的应用前景。但现有的控制策略常采用id=0控制,在电机运行过程中往往不能有效利用其磁阻转矩。最大转矩电流比(以下简称MTPA) 控制策略可以合理地分配直轴和交轴电流的值,使得在相同的电枢电流下,产生的电磁转矩最大[1]。MTPA控制对于减小电能损耗、进一步提高恒转矩负载类电机的运行效率有着较大的意义。
目前,对于MTPA的实现策略可以分为离线方法和在线方法[2]。MTPA的离线方法包括查表法、公式法、多项式拟合法等,离线算法需要准确的电机参数和模型,对电机参数的变化较为敏感[3]。在线方法包括搜索法、信号注入法、参数辨识法等。信号注入法通过向电机的定子绕组中注入高频小电流信号实时追踪 MTPA 工作点,但依赖电机参数的准确性[4]。参数辨识法可以在线辨识电机的d,q轴电感参数[5],但在线计算量较大。在线搜索法可以摆脱对电机参数的依赖,计算量小,具有较高的鲁棒性[6]。搜索法多采用定步长的方式,文献[7]指出,搜索法在负载转矩快速变化时可能会失效,搜索法的的动态性能与稳定性仍有待提高。文献[8]改善了搜索法使能机制,可使搜索法在面对IPMSM的工况变化时具有良好的动态性能。文献[9]分析了定步长搜索法应用于IPMSM调速系统中的稳定性,为调速系统使用该方法提供了理论依据。文献[10]结合了多项式拟合法提出的变步长搜索法,可以加快算法的收敛速度,同时改善动态性能,但其精度依赖于的拟合的函数。文献[11-13]将最优化的理论应用于搜索法,也可加快收敛速度,然而算法的复杂度有所增加。
本文结合恒转矩负载类电机的应用场景,分析了其稳定工作时的恒转矩曲线特性,采用基于梯度下降法的搜索法方案实现MTPA控制。并在传统梯度下降法的基础上,结合电机运行的实际状况对步长加以改进,实现对MTPA工作点的追踪。
1 IPMSM的MTPA控制
对IPMSM而言,其d,q轴的电压方程可以写成:
(1)
式中:Ld,Lq分别为直轴电感和交轴电感;ψf为永磁体磁链;Rs为定子绕组电阻;id,iq为直轴和交轴电流。电磁转矩方程:
(2)
交轴电流iq、直轴电流id和电枢电流is之间的关系:
(3)
式中:θ为电流矢量角。将电磁转矩表达式写成与定子电流和电流矢量角相关的表达式如下:

(4)
运动方程:
(5)
式中:TL为负载转矩;J为转动惯量;B为摩擦系数;ωm为电机转速。
式(4)表明,当输出电磁转矩一定时,存在一个最优的电流矢量角θ,使得定子电流is幅值最小。对调速系统而言,采用MTPA控制可以提高电机的运行效率。
从式(4)出发,对电流矢量角求偏导,并忽略电机参数的偏导值,可得:
(6)
2(Ld-Lq)iscos2θ+ψfcosθ-(Ld-Lq)is=0
(7)
对式(7)的一元二次方程求解,可得最优电流矢量角:
(8)
式(8)表明,最优电流矢量角的值由电机的d,q轴电感和永磁体磁链决定,MTPA曲线在d,q电流坐标轴上的轨迹如图1所示。
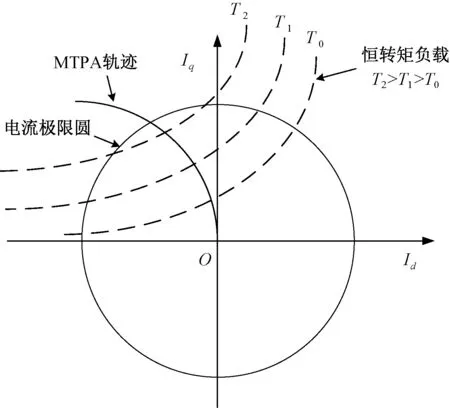
图1 MTPA运行轨迹
在电机实际运行过程中,采用式(8)计算MTPA工作点对电机参数的依赖性较大,而电机参数的测量往往需要较大工作量,不利于MTPA控制的工程应用。
2 梯度下降搜索法工作原理
对于风机、水泵等恒转矩负载的电机,当其工作在稳态时,可以认为输出的电磁转矩Te恒定。此时的MTPA 问题是如何在一定的电磁转矩下,跟踪其定子电流的最小值点。定义目标函数为定子电流is的大小,变量为电流矢量角θ,对于在某恒转矩区工作的电机,MTPA 问题可等效为有约束条件的非线性规划问题:

(9)
此时定子电流is和电流矢量角θ满足一定的映射关系,对式(4)求解电流is的解析式可得:
(10)
电流矢量角θ的工作范围为(90°,180°),可以看出,目标函数is(θ)是以输出电流矢量角θ为自变量的一元非线性函数。电机工作的恒转矩曲线如图2所示,其中定子电流变化量的梯度为▽is=Δis/Δθ。图2中,以MTPA工作点θMTPA为分界线,当电机工作点位于分界线左侧时,其定子电流变化量的梯度▽is<0;当工作点位于分界线右侧时,其定子电流变化量的梯度▽is>0;当电机工作在MTPA工作点附近时,曲线的斜率越来越平缓,达到MTPA工作点时,则有▽is=0。
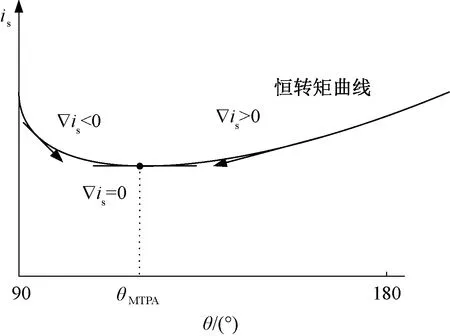
图2 恒转矩区工作下的电机is-θ曲线
综合上述分析的曲线特性,本文拟采用梯度下降法的策略对MTPA工作点进行搜索。梯度下降法的思想是沿着目标函数的梯度方向进行搜索,直至找到目标函数的极值点。采用梯度下降搜索法的收敛过程步骤如下:
(1)选择初始值θ0为初始的电流矢量角,Δθ0为初始步长,置k=0;
(2)以θk+1=θk+Δθk更新电流矢量角,待系统稳定后计算梯度▽is(θk);
(3)ε为允许的最小误差,如果|▽is(θk)|<ε,则停止迭代,输出θ*=θk+1,否则转到步骤(4);
(4)以迭代公式Δθk+1=-t▽is(θk)更新搜索步长,t为系统学习率,k=k+1,回到步骤(2)。
上述梯度下降搜索法的迭代收敛过程流程图如图3所示。
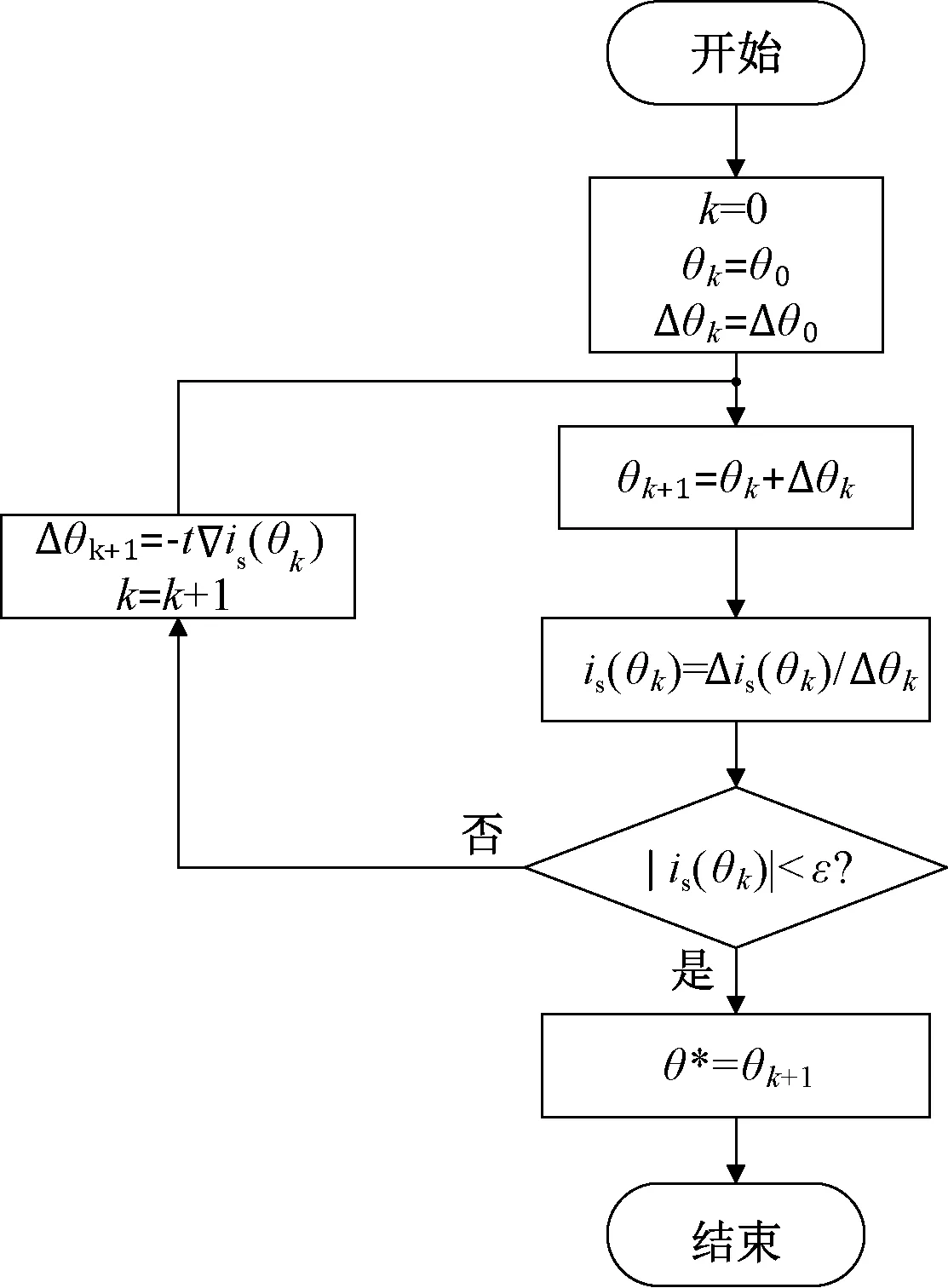
图3 梯度下降搜索法流程图
梯度下降法的步长Δθ是决定算法收敛速度和准确率的关键参数。若步长设置过小,虽能获得良好的准确率,但同时会导致算法收敛速度变慢;而步长设置过大,算法前期会快速运行,但到后期会在极值点附近产生振荡,阻碍算法收敛。针对电机的实际运行状况,本文对传统的梯度下降法步长进行如下改进:
(11)
式中:b为最小步长。在工作点远离MTPA工作点时,采用随机梯度下降法,式(11)中t为常数。当接近MTPA工作点时,由于系统的梯度变化不明显,此时改用定步长的方式进行搜索。
实际应用梯度下降法对工作点进行追踪时,需保证电机的工作点处于一条恒转矩曲线上。因此,应在电机处于稳态工作一段时间后再启用搜索法,并且由于电流环存在一定的调节过程,搜索法的控制周期不能设定得太短,具体时间需结合工程实际设置。
3 仿真结果及分析
为验证上述控制策略的有效性,利用MATLAB/Simulink搭建了系统仿真模型。仿真实验的电机参数如表1所示。
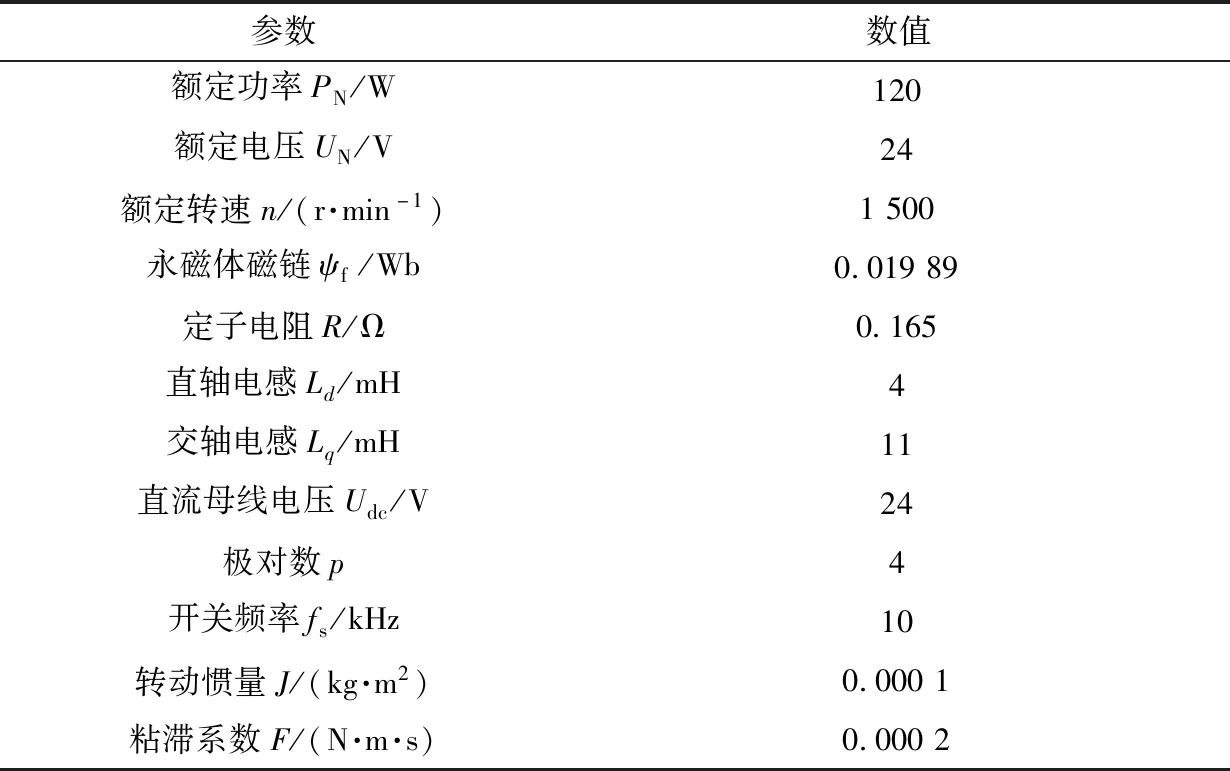
表1 PMSM部分参数
下面仿真验证电机在起动和突加负载后,梯度下降搜索法对MTPA工作点的追踪过程。其中系统的仿真时间为3 s,初始负载转矩为0.1 N·m,在1 s时突加负载为0.2 N·m,参考转速为1 000 r/min。初始电流矢量角为90°,初始步长Δθ0=3°,搜索法控制周期为0.06 s,系数t=125,b=1°,允许的最小误差ε=0.005,仿真实验的波形如图4所示。
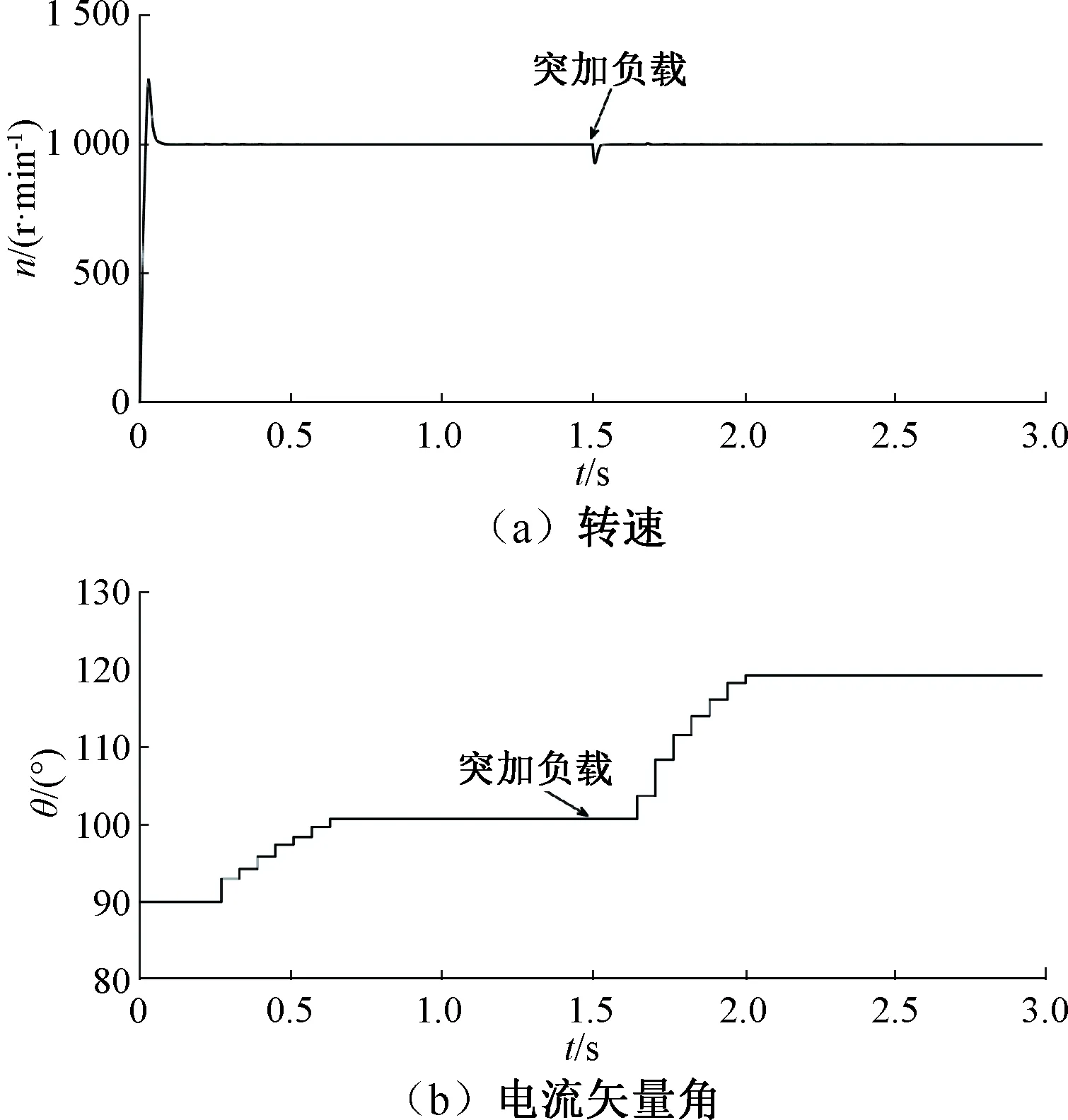
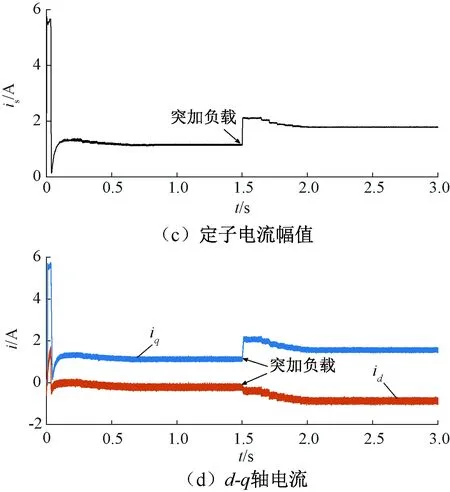
图4 梯度下降搜索法仿真波形
图4(b)显示电机在起动后,于0.27 s时开始搜索MTPA工作点,最终在0.63 s时收敛于100.7°,搜索时间为0.36 s。图4(c)给出了定子电流幅值变化曲线,定子电流幅值从1.32 A减小到了1.14 A,电流幅值下降了约13.7%。
电机在突加负载后,转速出现短暂的下降,其余时间基本维持在1 000 r/min。图4(b)显示,突加负载后在1.64 s时开始搜索MTPA工作点,最终在2 s时收敛于120.2°,搜索时间为0.36 s。观察定子电流变化曲线,在系统突加负载后,梯度下降搜索法实现了MTPA工作点的追踪,电流幅值从2.1 A减小到了1.78 A,电流下降了约15.3%,实现了电机运行效率的优化。
为验证梯度下降搜索法对MTPA工作点的追踪性能,采用传统的定步长搜索法进行对比实验,其中定步长大小为1°,其余的实验条件和梯度法相同,仿真波形如图5所示。
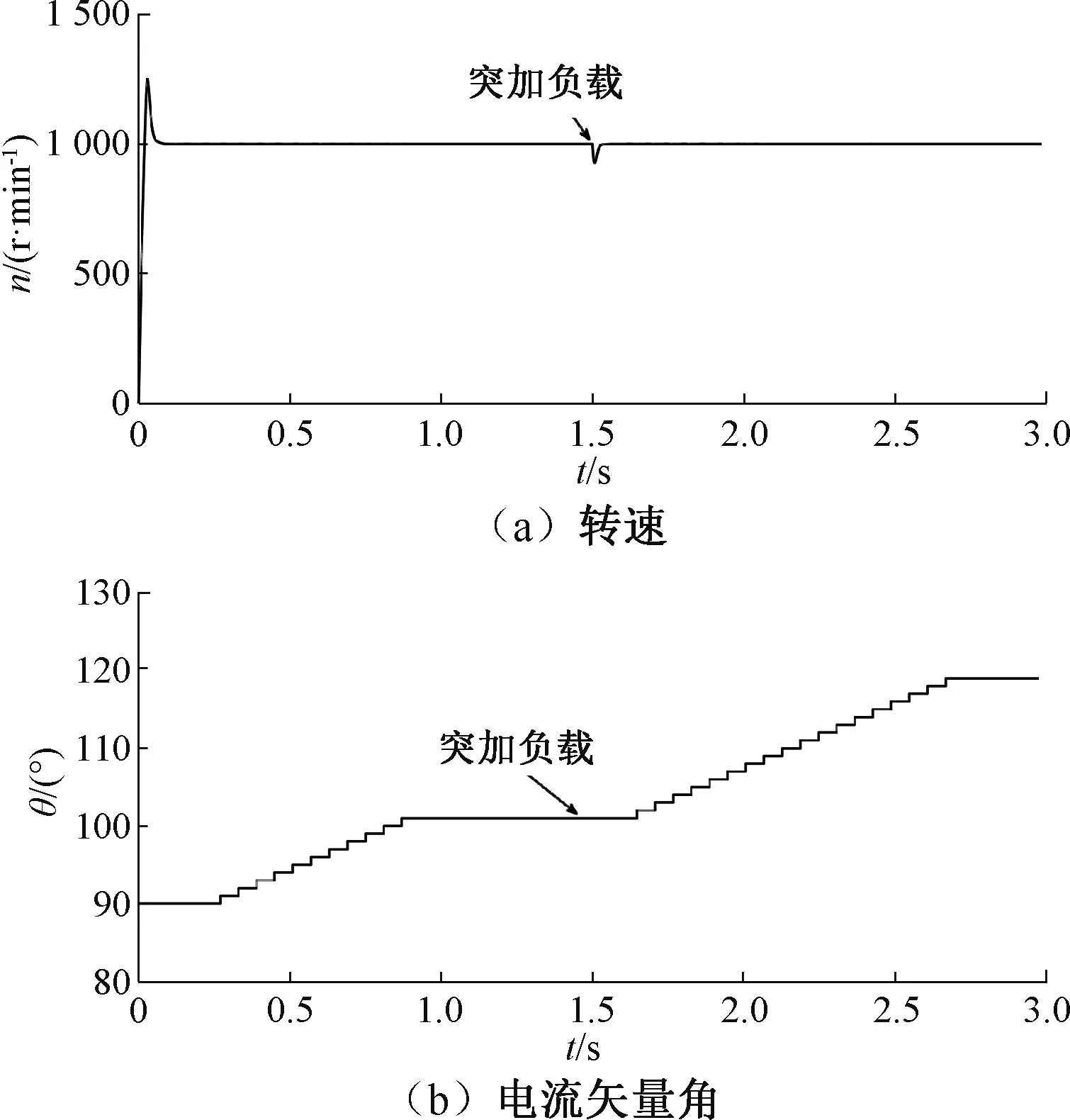
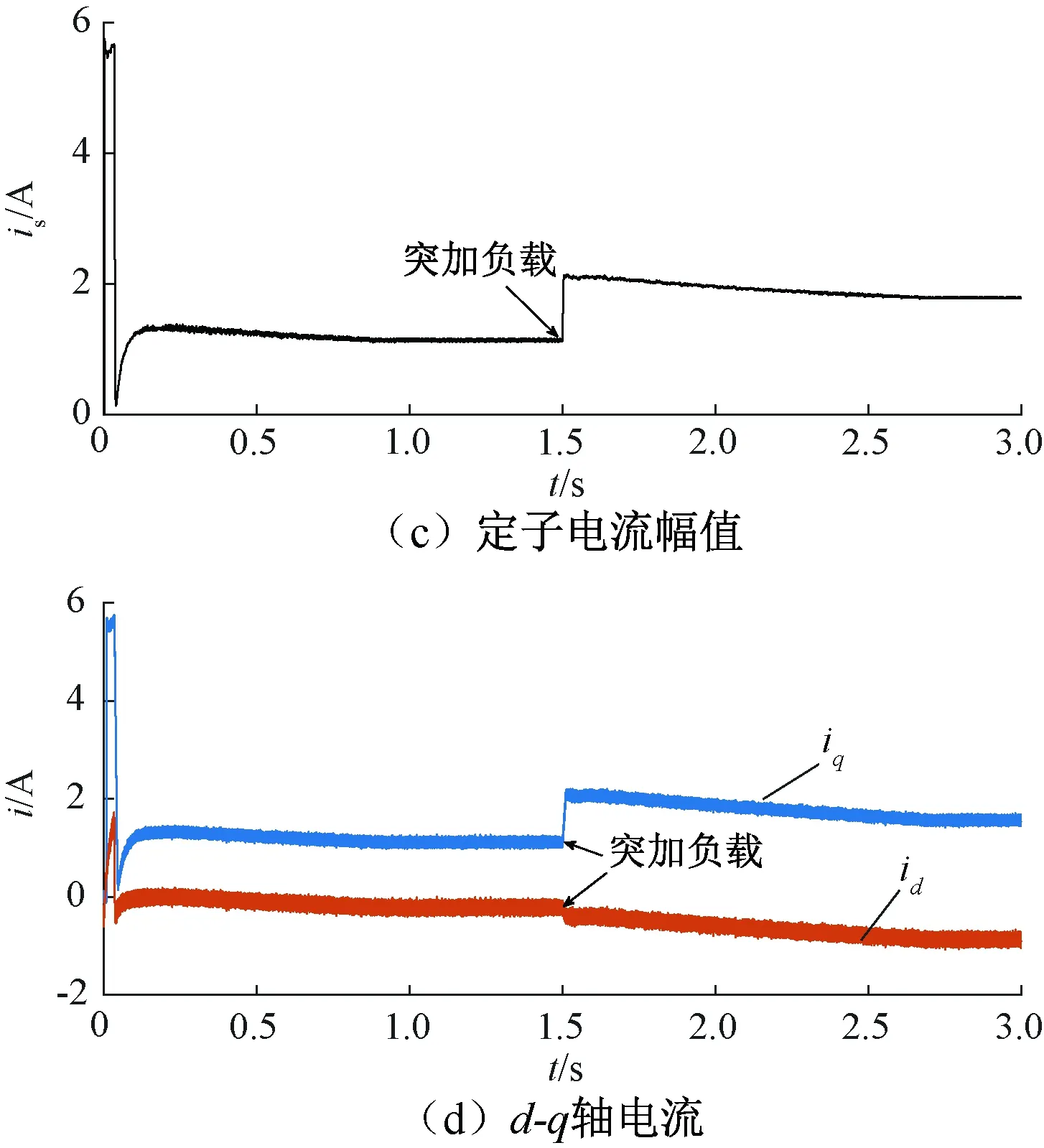
图5 定步长搜索法仿真波形
图5(b)显示,电机起动后,定步长搜索法在0.27 s时开始搜索MTPA工作点,最终在0.87 s时收敛于101°,搜索时间为0.6 s。突加负载后,定步长搜索法在1.64 s时开始搜索MTPA工作点,最终在2.66 s时收敛于119°,搜索时间为1.02 s。
对比图4和图5的仿真结果可知,电机起动后,梯度下降搜索法相较定步长搜索法搜索时间减少了58.6%,突加负载后的搜索时间减少了64.7%,在搜索速度上具有明显优势。两种算法在搜索过程中的电流波形平稳,且转速未出现较大波动,可以认为输出的电磁转矩稳定。对比图4和图5的定子电流幅值和d,q轴电流波形,定步长搜索法的电流变化趋势相对梯度下降搜索法较为缓慢,因此梯度下降搜索法具有更快的响应速度。
4 实验结果及分析
实验平台如图6所示,由直流无刷电机、直流电源、磁粉制动机以及基于STM32微控制器为核心搭建的驱动器组成,实验数据的采集通过串口通信协议传输至上位机平台,如图6所示。实验所用的电机参数和仿真相同。
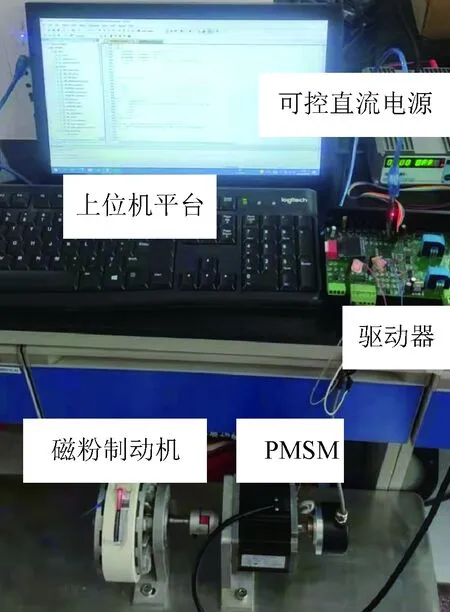
图6 实验平台
实验验证了电机在参考转速为1 000 r/min,在空载起动以及外界突加负载的情况下,梯度下降搜索法对MTPA工作点的追踪过程。其中,电流矢量角的初始值为90°,初始步长Δθ0=3°。由于电流环存在一定的调节过程,搜索法的周期设定为0.3 s,并且对采集的定子电流做了适当的滤波处理,实验波形如图7所示。
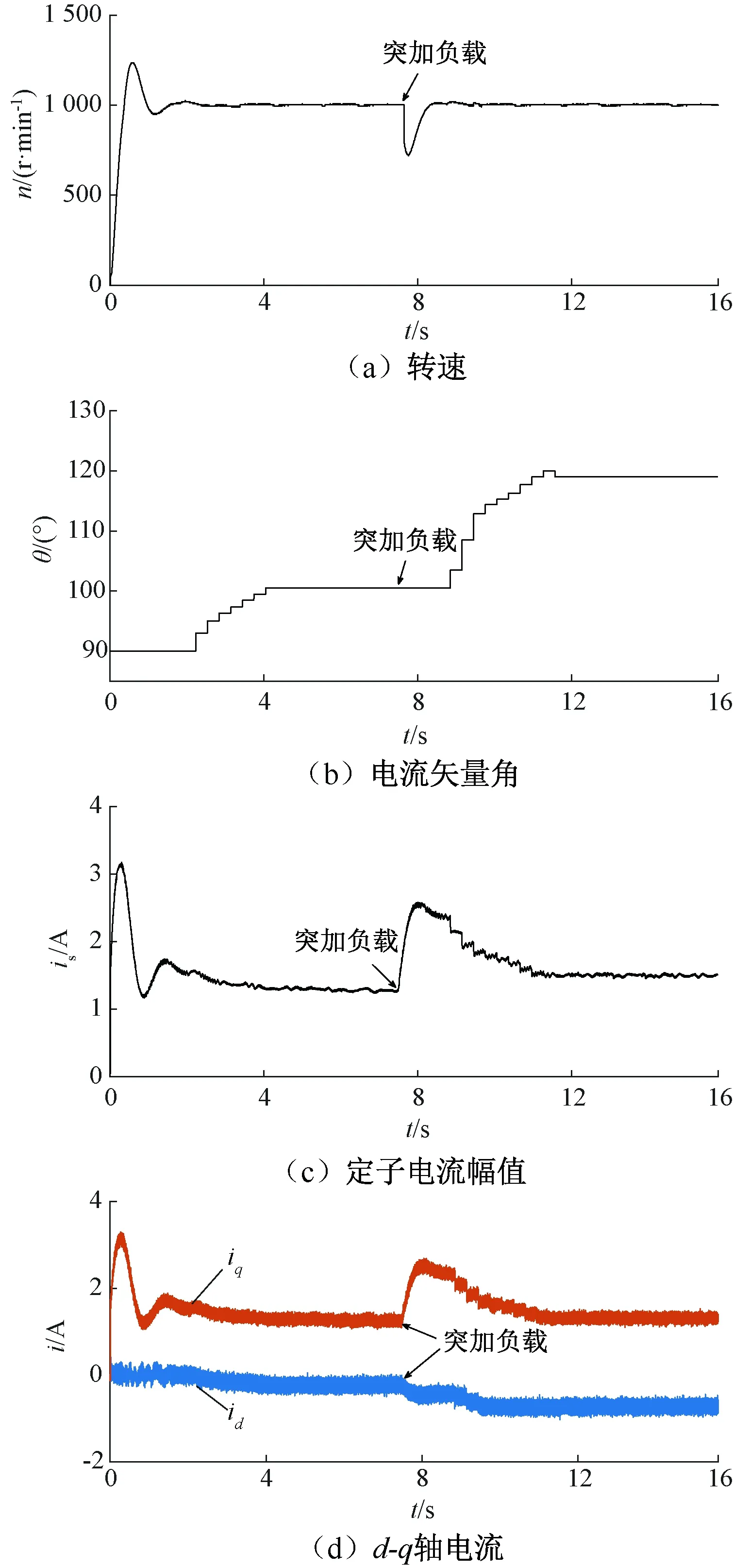
图7 梯度下降搜索法实验波形
观察图7波形可知,电机起动并到达1 000 r/min后,于2 s时开启对MTPA工作点的搜索,并在4.1 s时收敛于100.5°,搜索时间为2.1 s。相比于id=0控制,电流从1.56 A减小到1.28 A,电流下降了约18%。实验于7.6 s时突加负载,电机转速出现短暂波动后重新稳定在1 000 r/min,待电机稳定运行一段时间后于8.6 s时开启对新工况下MTPA工作点的搜索,并在11.6 s时收敛于119°,搜索时间为3 s,定子电流大小从2.13 A减小到1.5 A,电流下降约29.6%。
采用定步长搜索法进行对比实验,其中定步长大小为1°,其余的实验条件和梯度法相同,实验波形如图8所示。
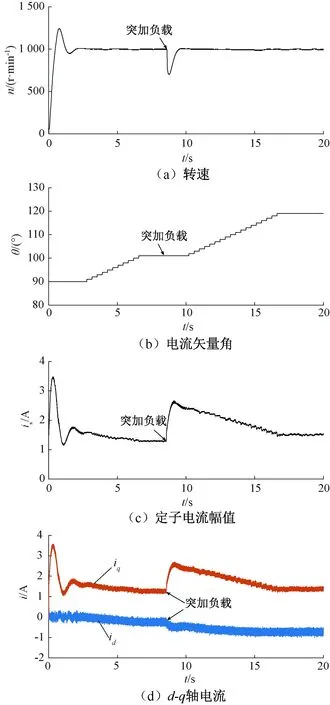
图8 定步长搜索法实验波形
电机起动后,定步长搜索法在2.7 s时开始搜索MTPA工作点,并在6 s时收敛于101°,搜索时间为3.3 s。突加负载后,定步长搜索法在11.1 s时开始搜索MTPA工作点,最终在16.5 s时收敛于119°,搜索时间为5.4 s。
由实验结果可知,梯度下降搜索法在电机起动后的搜索时间比定步长搜索法减少了36.3%,突加负载后的搜索时间减少了44.4%,相较传统搜索算法在收敛速度上提升明显。观察两种算法的实验电流波形可知,在搜索最优电流矢量角的过程中电机转速均未出现较大波动,输出的电磁转矩平稳。对比两种算法的实验电流波形可知,在搜索精度相同的情况下,梯度下降搜索法相对传统算法的电流变化趋势更加明显,响应速度更快。
5 结 语
对应用于恒转矩负载场景的IPMSM,本文分析了其工作时的恒转矩曲线特性,提出了一种基于梯度下降搜索法的控制方案,以实现对电机运行过程中MTPA工作点的追踪,并结合电机运行的具体情况对传统的梯度下降法的步长进行了优化。本文算法不依赖电机参数,便于在工程应用中推广。
仿真和实验结果表明,基于梯度下降搜索法可以有效实现MTPA控制,对MTPA工作点具有良好的追踪性能。本文方案有利于恒转矩负载工作的电机在其长期运行过程中节约电能,实现效率优化。
