船舶电力推进矢量控制系统的研究
2022-08-12朱奥辞
朱奥辞,戴 睿
应用研究
船舶电力推进矢量控制系统的研究
朱奥辞,戴 睿
(中国船级社芜湖分社,安徽芜湖 241001)
研究了船用永磁同步电机矢量控制系统以及船-桨特性,仿真分析了船舶电力推进过程中直接起动和分级起动的船-桨特性变化曲线,验证了船舶电力推进矢量控制系统的有效性以及分级起动的优越性。
电力推进 矢量控制 船桨特性 分级启动
0 引言
船舶电力推进系统是由电动机取代传统柴油机驱动螺旋桨运转的一种船舶推进方式。采用永磁同步电机做为船舶电力系统的驱动电机,具有功率因数高、调速动态响应快、起动转矩大、振动噪声小以及具有更高的推进效率等优点。电力推进系统已经成为未来船舶高度智能化发展不可或缺的一部分。本文在船用永磁同步电机矢量控制技术的基础上结合船-桨运行特性,对船舶电力推进系统进行半实物仿真建模分析研究。
1 永磁同步电机数学模型及其矢量控制
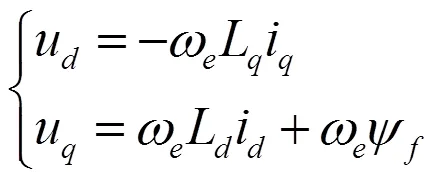
1.1 永磁同步电机在dq下的数学模型
将(2)代入(1)得:
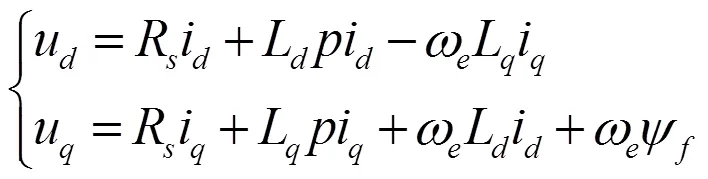
当电机稳态运行且忽略定子压降时,(3)式可改写为:
永磁同步电机电磁转矩为:
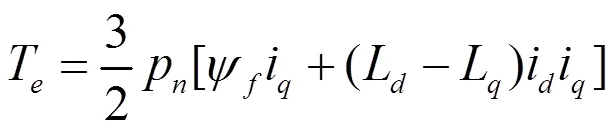
其中,T为电磁转矩;p为电机极对数。
1.2 永磁同步电机矢量控制
三相永磁同步电机的控制是通过对其转矩的控制来实现。由式(5)可知,电磁转矩又可以通过定子电流变化而控制。在矢量控制中,通过坐标变换对交流电机相互交叉耦合的模型进行空间解耦,把复杂的数学模型等效成直流电机模型进行控制,从而可以控制解耦后的交直轴电流进而控制交流永磁同步电机[1~2]。
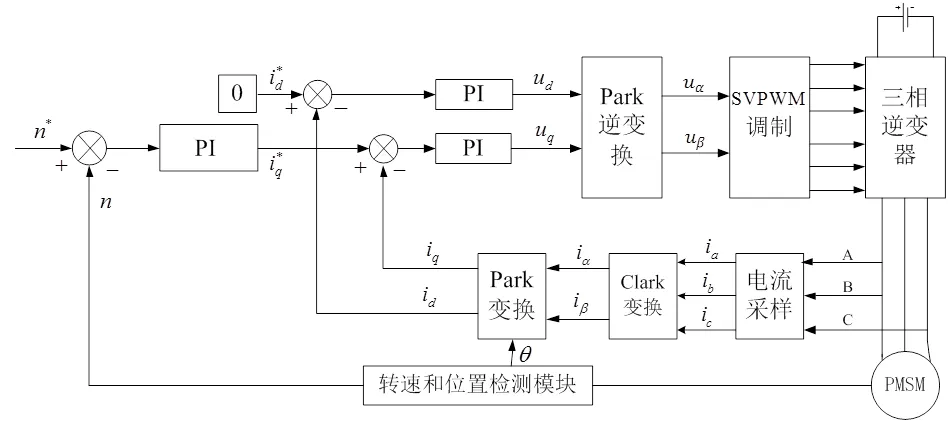
图1 永磁同步电机矢量控制框图
2 螺旋桨推进特性及其数学模型
船舶运行依靠螺旋桨旋转产生推力,力的作用是相互的,螺旋桨在水中旋转给水一个作用力,同样水也给螺旋桨一个反向的作用力。就船舶电力推进系统而言,螺旋桨反向的作用力就是施加在螺旋桨上的阻转矩,推进电动机必须能够产生足够克服螺旋桨上阻转矩的有效电磁转矩,才能使螺旋桨持续转动,提供船舶运行的动力[7]。
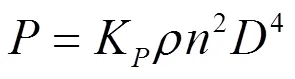
螺旋桨在流体中旋转产生的推力P及阻转矩M的数学表达式为:
船舶在实际运行过程中,螺旋桨与船体之间不可避免会存在水流相互作用,对螺旋桨实际输出的有效推力将产生消极影响。螺旋桨与船体的相互作用效应通常分为两种:一是船对螺旋桨的影响,也就是伴流影响;另外一种是螺旋桨对船体的影响,称为推力减额影响。设伴流系数为,推力减额系数为。通过对伴流影响和推力减额两种船桨相互作用的分析可得[9]:
环境监测模块设计可以完成实时检测周围的温湿度[9]、PM2.5、降雨量、空气质量、大气压以及震动强度等多种数据信息,按照设定值进行比较并预警,当相应数据过高时发出报警。环境检测模块结构如图4所示。
船舶在航行过程中会受到水的阻力,通常情况下水对船体的阻力可用以下公式表述:

式中,是阻力系数。
由船-桨模型和牛顿第二定律可得船体的运动学方程为:
3 仿真与分析
3.1 仿真建模
本文仿真通过在半实物仿真软件上分别搭建控制模型和功率硬件电路模型,编译自动生成代码下载到虚拟系统中,可以实现对控制对象的在线参数修改,实时仿真,从而可以最客观准确的反应推进系统的实时运行状态[10]。船舶电力推进系统仿真研究主要搭建模型由两个大系统组成:发电和配电系统、螺旋桨驱动系统。由此可以构成一个完整的船舶电力驱动系统,如图2所示。
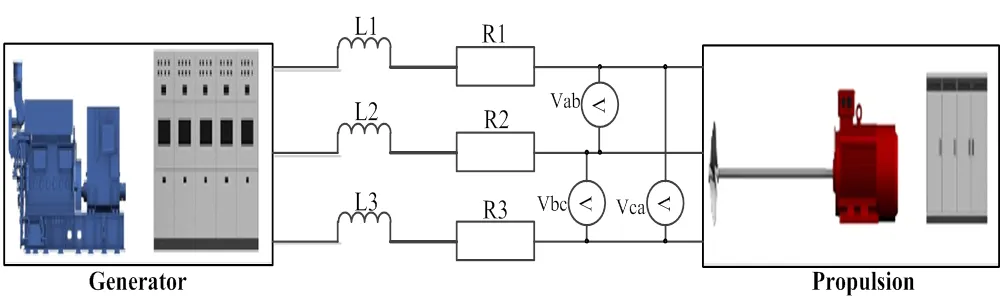
图2 船舶电力推进系统模型
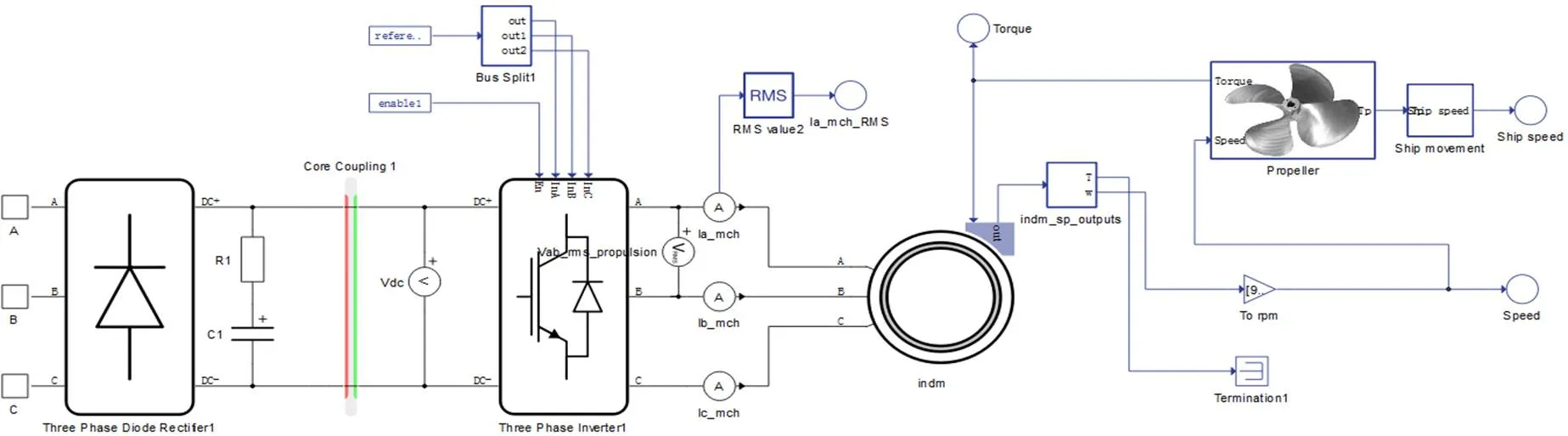
图3 螺旋桨驱动系统模型
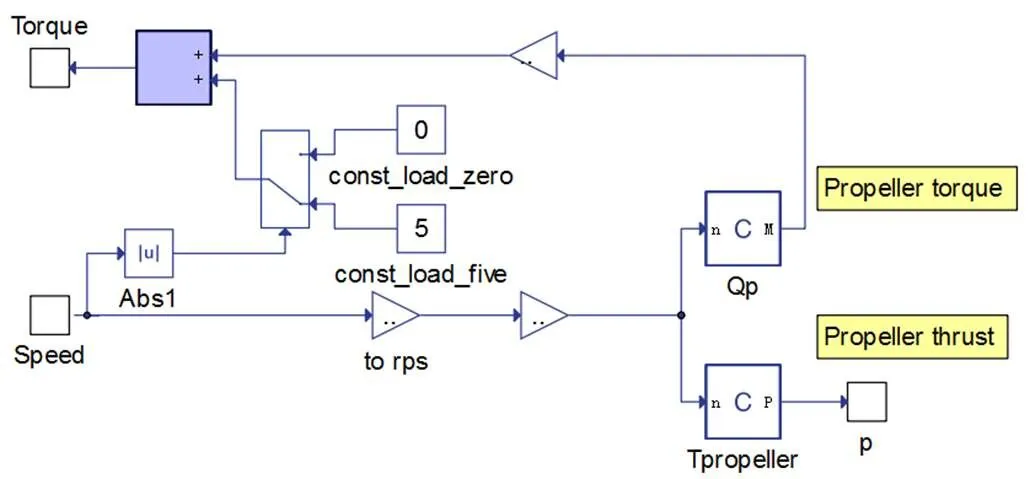
图4 螺旋桨推进和阻转矩模型
根据图1矢量控制原理框图,可以搭建螺旋桨驱动系统模型。如图3所示,主要包括:三相整流逆变功率器件模块、螺旋桨推力计算模块、船速计算模块等。
根据式(8)和式(9)可以建立螺旋桨推力模型和阻矩模型,如图4所示。
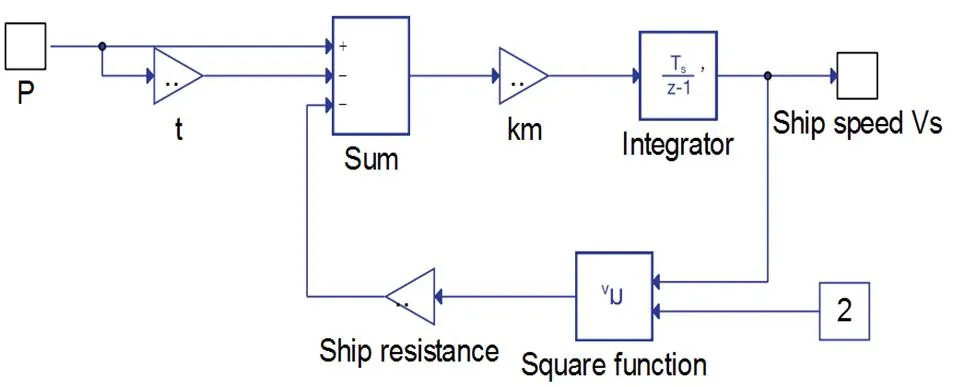
图5 船舶运动学模型
船舶电力推进系统的具体实现过程为:柴油发电机提供三相交流电,由分配测量模块将三相交流电送到整流器模块。整流模块输出对应的直流电作为三相逆变器的直流母线电压,经过电压空间矢量变换算法输出六路PWM开关信号。控制逆变器模块输出三相可调交流电压驱动永磁同步电机运转,进而带动螺旋桨提供船舶运行推力。
3.2 仿真分析
本文在对船舶电力系统进行仿真研究时采用的基本特性参数如表1所示。
表1 船舶电力推进系统仿真基本参数
在对船舶电力推进矢量控制系统仿真时,分别对船舶由静止状态直接起动和分级起动进行仿真,对比分析研究两种起动状态的螺旋桨转速、螺旋桨阻转矩以及船舶航速特性。
直接起动:直接给定永磁同步电机转速1 300 r/min,分别观察螺旋桨的转速变化、螺旋桨阻转矩变化、船舶航速变化。
如图所示,图6、图7、图8分别为螺旋桨转速、螺旋桨阻转矩、船舶航速曲线图。船舶由静止状态初始起动时,给定螺旋桨转速1 300 r/min,起动瞬间电机会输出大的起动转矩。由图6可见,螺旋桨转速在起动瞬间存在超调量,5 s时刻达到给定稳态。由图7螺旋桨阻转矩和图8船舶航速曲线可知,螺旋桨阻转矩起动时迅速达到最大转矩3 280 N·m左右,由于船舶起动时存在较大惯性作用,初始起动时船舶航速动态响应滞后于螺旋桨,此时船舶航速为0;随着船速的稳步上升,螺旋桨阻转矩逐渐减小,经过5 s达到稳定状态3 200 N·m。当螺旋桨转速达到稳定状态时,螺旋桨阻转矩也达到稳态,此时推进电机输出电磁转矩与螺旋桨阻转矩相等,从而可以保证船舶航速稳定上升,船舶航速经过50 s达到稳定航速25 kn。由螺旋桨转速曲线和螺旋桨阻转矩曲线可以看出当给定螺旋桨较大转速时,采用直接起动,螺旋桨转速存在超调现象,螺旋桨转矩存在过载现象,所以在实际航行中船舶直接起动到大航速会对电力推进系统造成不可逆转的损坏。
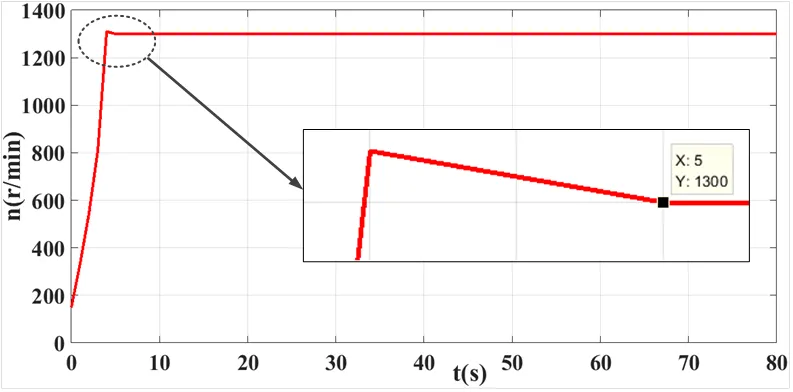
图6 船舶直接起动螺旋桨转速
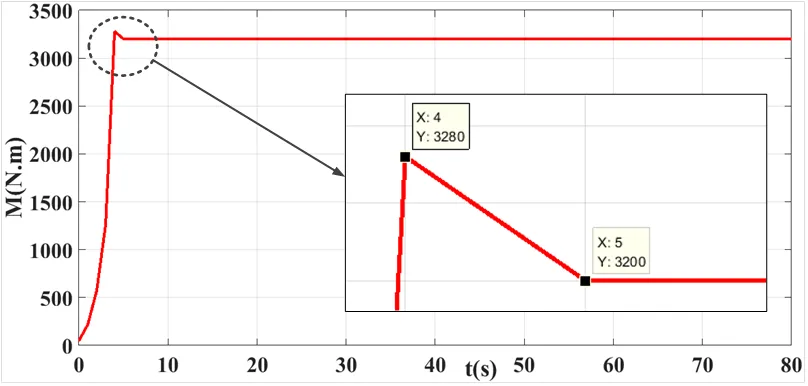
图7 船舶直接起动螺旋桨阻转矩
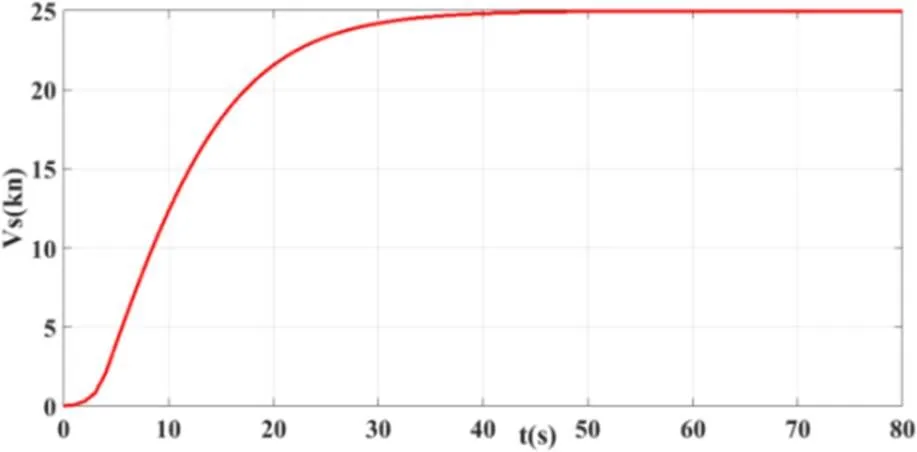
图8 船舶直接起动船舶航速
分级起动:首先给定螺旋桨驱动电机转速为700 r/min,待航速上升到稳定状态时,驱动电机转速加速到1300 r/min。螺旋桨的转速、螺旋桨阻转矩、船舶航速如图9、图10、图11所示。
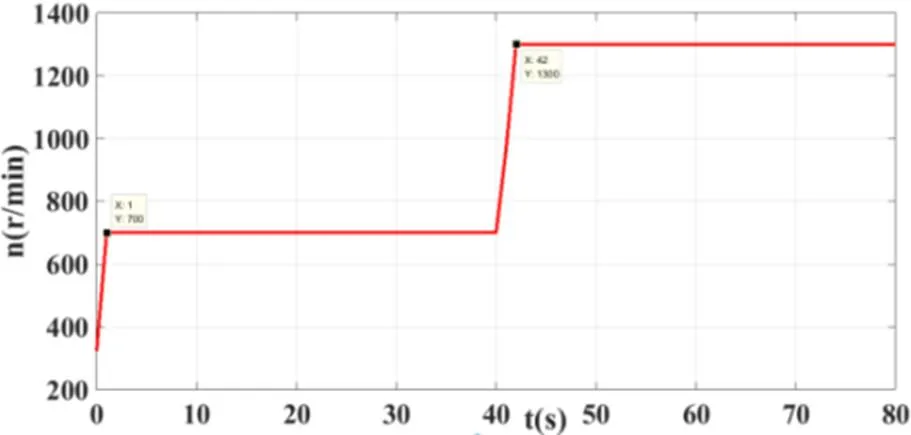
图9 船舶分级起动螺旋桨转速
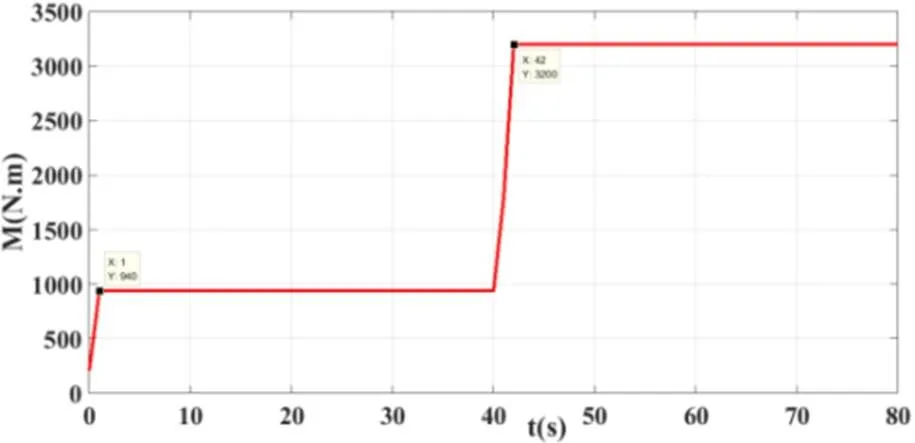
图10 船舶分级起动螺旋桨转矩
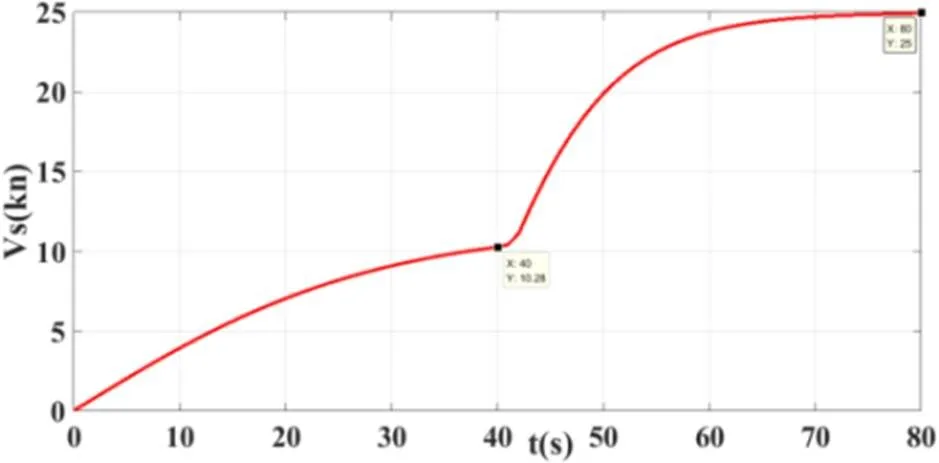
图11 船舶分级起动船舶航速
首先给定螺旋桨转速700 r/min,螺旋桨转速经过1 s达到给定转速,螺旋桨阻转矩达到940 N·m,螺旋桨转速和阻转矩进入稳态,船舶航速加速上升。当船舶运行40 s时刻,航速达到10.28 kn左右时,此时将螺旋桨转速加速至1 300 r/min。由图9和图10可以看出,加速后螺旋桨转速和阻转矩快速上升,经过2 s时间,螺旋桨转速无超调达到给定转速,螺旋桨转矩达到3 200 N·m。由图11可知,螺旋桨在40 s时刻加速后,由于船舶存在惯性作用,船舶航速在41 s时刻才开始以新的加速状态运行,直至达到稳态航速25 Kn。由上图可以看出船舶到达同样的航速,采用分级起动,螺旋桨转速无超调,阻转矩无过载现象,系统的动态响应性能较好,船舶可以由静止状态稳步过渡到给定航速,因而在实际航行中采用分级起动有助于船舶电力推进系统的良好运行。
4 结束语
船舶电力推进系统作为未来船舶绿色和智能推进系统的主要发展方向,具有节约能源和减小水域环境污染以及提升智能航行性能优势,使得船舶运营符合更安全环保、更经济的时代需求。
[1] 张惠媛. 基于矢量控制的炮塔伺服系统仿真研究[J]. 黑龙江科技信息, 2017 (7): 77.
[2] 李培伟. 永磁同步电机伺服系统矢量控制技术研究[D]. 南京理工大学, 2013.
[3] 徐奔奔, 周芝峰, 霍文明, 杨恩星. 基于改进的模糊控制PMSM矢量控制系统研究[J]. 电力科学与工程, 2016, 32(3): 1-3.
[4] 赵颖伟. 混合动力客车永磁同步电机控制系统研究[D]. 哈尔滨:哈尔滨工业大学,2013.
[5] 龚事引, 于惠钧, 宋翼颉. 基于模糊PID的永磁同步电机矢量控制系统[J]. 湖南工业大学学报, 2015(4): 40-44.
[6] 王鹏博, 卢秀和. 基于模糊PI及矢量变换控制方法的电动车驱动系统工况适应性研究[J]. 电测与仪表, 2019.
[7] 刘勇. 船舶典型电动机仿真研究[D]. 大连:大连海事大学, 2017.
[8] 曹国瑞. 吊舱式液压推进系统——舰艇推进新模式探讨[J]. 中国舰船研究, 2012, 7(2): 65-71.
[9] 黄辉, 褚建新, 沈爱弟. 基于定子电流的电力推进船舶螺旋桨故障诊断[J]. 中国航海, 2014, 37(3): 28-31.
[10] 赵钢, 朱奥辞, 张世忠. 基于HIL的永磁同步电机矢量控制系统的开发[J]. 电测与仪表, 2019, 56(21): 117-121.
Research on vector control system of ship electric propulsion
Zhu Aoci,Dai Rui
(Wuhu Branch of China Classification Society, Anhui Wuhu 241001, China)
U664.14
A
1003-4862(2022)07-0033-04
2021-12-20
朱奥辞(1994-),男,硕士研究生,研究方向:电力电子传动。E-mail: aczhu@ccs.org.cn
