基于改进UKF算法的锂电池SOC估计
2022-08-12董策勇李红月
董策勇,李红月
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
1 引言
锂电池SOC是电池管理系统(BMS)中的一个重要参数,SOC的精确估计对电动汽车的安全、稳定运行发挥着重要作用[1,2]。然而SOC却无法像电流、电压那样通过传感器直接获得,需要通过特殊的方法进行估计。现阶段,常见的SOC估计方法有:安时积分法[3]、开路电压法[4]、神经网络法[5,6]以及卡尔曼滤波法[7,8]等。其中,安时积分法由于SOC估计时初始值难以确定,导致SOC估计误差不断累积,其精度会随着降低;开路电压法需要把电池静置很长时间,才能获取精确的开路电压值,这种条件在电动汽车实际运行中很难达到;神经网络法需要大量的数据对模型进行训练,但当训练不充分时,SOC估计的精度就会降低。
由于卡尔曼滤波算法(KF)只能解决线性系统问题,国内外研究学者对KF算法进行改进,提出了扩展卡尔曼滤波算法[9,10](EKF)和无迹卡尔曼滤波算法[11](UKF)等非线性系统算法。EKF算法在进行线性化处理时,由于忽略一阶以上的高阶项,引入了线性误差问题,并且还容易造成算法的发散。UKF算法针对线性化方法进行了改进,采用无迹变换求取协方差和均值,避免了线性误差问题,有效地提高了SOC估计的精度[12,13]。但是UKF算法在SOC估计过程中忽略了系统噪声的时变特性,采用固定的系统噪声值,导致了锂电池SOC估计精度较低、稳定性较差[14]。因此,本文采用了Sage-Husa自适应滤波器对系统噪声进行实时估算和修正,再与UKF算法相结合的AUKF算法。
本文基于Thevenin电路等效模型,通过可变遗忘因子最小二乘算法(VFFRLS)对模型参数进行实时辨识,再将参数辨识结果传递给AUKF算法进行SOC的在线估计。最后在UDDS工况对该算法进行了验证。
2 电池模型建立与参数辨识
2.1 电池模型建立
建立锂电池电路等效模型是锂电池SOC估计的重要一步,模型的精度将会直接影响最终SOC估计精度。本文采用如图1所示的Thevenin等效电路模型,相比较于其它模型具有结构简单、计算复杂度低以及SOC估计精度高的特点。
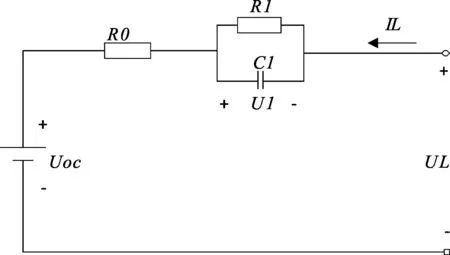
图1 Thevenin等效电路模型
图1中,Uoc为开路电压,R0为欧姆内阻,R1和C1分别表示极化电阻和极化电容,UL为锂电池端电压,IL为电池干路电流。该模型的数学表达式为:
(1)
锂电池SOC的计算表达式为:
(2)
式(2)中,SOC(t)为当前t时刻的值;CN为电池额定容量;I(t)为t时刻电流;SOC(t0)为t0时刻SOC值。
2.2 OCV-SOC拟合曲线
开路电压Uoc和SOC之间有着很强的对应关系,它们的关系曲线在SOC估计中发挥着重要作用。本文以容量为3200 mAh的18650型三元锂电池为研究对象,对该锂电池进行HPPC工况实验来获取OCV-SOC关系曲线。首先对电池充满电,静置1 h以上;采用0.3 C横流放电,每次循环放电10%SOC,直至SOC为0。最后将得到的10组OCV-SOC数据通过MATLAB/Curve Fitting软件进行关系拟合,关系曲线如图2所示。
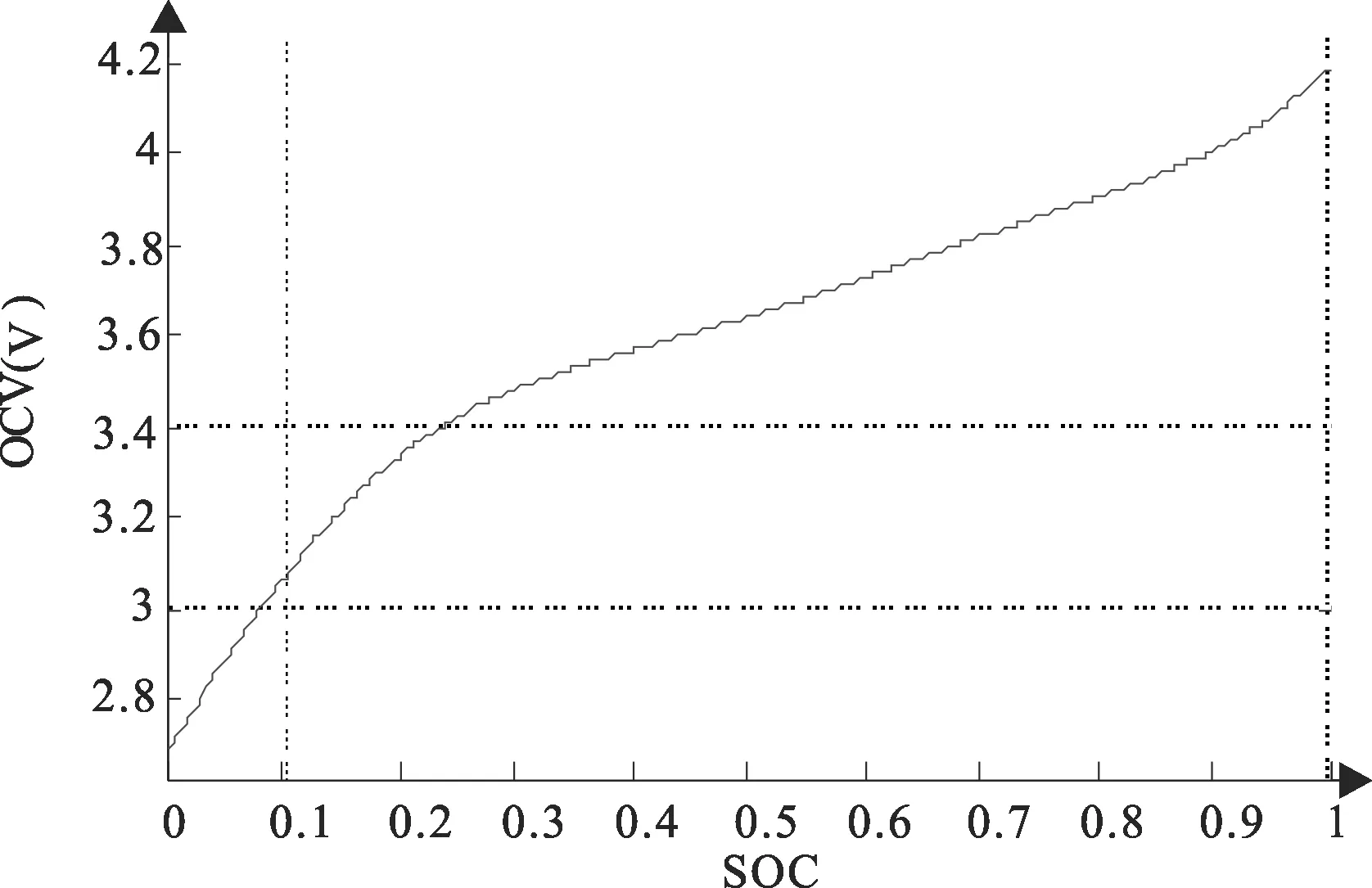
图2 OCV和SOC关系曲线
2.3 基于VFFRLS算法的参数辨识
VFFRLS算法是对RLS算法的改进,可以根据估计误差的大小实时的计算出RLS算法中可变遗忘因子的最优值。可变遗忘因子λ的计算公式如下[15,16]:
(3)
式(3)中,λ(k)为当前时刻的遗忘因子;ρ为敏感因子。λmax、λmin分别为遗忘因子的最大值和最小值;M为窗口大小;ei为i时刻的参数估计误差。
计算出λ值后,再结合RLS算法对锂电池模型参数进行辨识。RLS算法的具体递推公式如下:
(4)

结合VFFRLS算法,对模型表达式(1)进行离散化处理,得到用于锂电池参数辨识的离散化系统方程:
UL(k)=Uoc(k)+a1IL(k)+a2IL(k-1)
+a3[Uoc(k-1)-UL(k-1)]
(5)
式(5)中,a1~a3是用R0,R1和C1表示的参数,通过对a1~a3的反解得到每个时刻R0,R1和C1的参数值,最后再把参数辨识结果传递给AUKF算法进行锂电池的SOC估计。
3 基于AUKF算法的SOC估计
3.1 UKF算法
UKF算法是采用无迹变换(UT)解决了系统噪声的均值和协方差非线性问题。有效克服了无迹卡尔曼滤液(UKF)算法忽略高阶项而导致的精度低,稳定性差的缺陷。
系统的状态方程和测量方程为:
(6)
式(6)中,xk为k时刻的状态向量;wk为系统白噪声;yk为观测向量;vk为测量噪声。
UKF算法估计SOC的具体流程:
流程二:计算k-1时刻的Sigma采样点:
(7)
流程三:状态变量时间更新。
利用步骤(2)获得的Sigma采样点,计算出k时刻状态变量均值和协方差的预测值:
(8)
流程四:测量变量时间更新。计算k时刻观测变量的预测值。
(9)
流程五:协方差与卡尔曼增益矩阵Kk更新。

+Rk
(10)
(11)
(12)
流程六:状态变量和协方差测量更新。
(13)
(14)
将锂电池SOC估计的非线性系统方程(1)和(2)经过离散化处理,应用到上述UKF算法中,从而实现SOC的估计。
3.2 AUKF算法
使用UKF算法对锂电池SOC进行估计时,往往将系统的噪声设定为定值,但是电动汽车实际行驶过程中系统噪声是时变的,不变的系统噪声导致了SOC估计的精度不高。针对以上问题,本文在UKF算法的基础上加入了Sage-Husa自适应滤波器对系统噪声进行实时的估计和校正,以提高SOC的估计精度。Sage-Husa自适应滤波算法对系统噪声的估算如下:
3.2.1 过程噪声均值和协方差的计算
(15)

3.2.2 测量噪声均值和协方差的计算
(16)
通过对系统过程噪声和测量噪声自适应更新后,再与UKF算法SOC估计流程相结合,进而提高SOC估计的精度和稳定性。
4 仿真结果与分析
本文选用容量为3200 mAh的18650型三元锂电池作为研究对象。采用UDDS循环工况数据作为验证数据,将UDDS工况数据导入MATLAB软件中,进行AUKF算法的精度验证,并与UKF算法对比。SOC初始值设定为0.8,实际初始值为1,采样间隔为0.1s。图3为两种估计算法的SOC估计结果对比图,图4为SOC估计误差对比图。
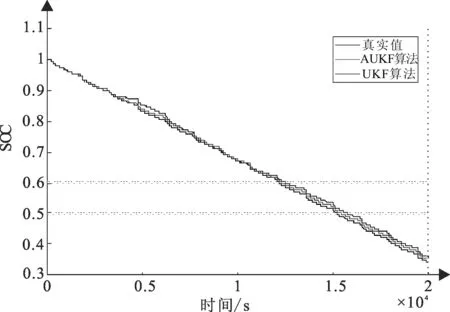
图3 SOC估计结果对比
由图3的SOC估计结果可以看出AUKF算法比UKF算法更加逼近SOC真实值。由图4的SOC误差对比可以看出AUKF算法明显优于UKF,具有更好的估计精度和稳定性。为了更直观体现2种SOC算法的估计效果,本文选取SOC平均误差与SOC最大误差作为评价指标,如表1所示。

图4 SOC误差对比
由表1数据对比可知,AUKF的SOC最大误差与SOC平均误差均比UKF算法小。相比较与UKF算法,AUKF算法SOC精度提高了1.04%。充分验证了AUKF算法的精确性和稳定性。

表1 2种算法的SOC估计误差对比 %
5 结论与讨论
本文为提高UKF算法的SOC估计精度,利用Sage-Husa自适应滤波器对系统噪声进行实时估算和修正,形成AUKF算法。基于Thevenin等效电路模型,利用VFFRLS算法对等效模型参数进行辨识,再把参数辨识结果传递给AUKF算法进行SOC估计。通过仿真结果对比,验证了AUKF算法的SOC估计能力要优于UKF算法,SOC估计精度提升了超1%,具有更好的精确性和收敛性。
