基于维纳滤波的图像增强和消噪技术研究
2022-08-12宫威
宫威
( 江苏自动化研究所,江苏 连云港 222061)
0 引 言
图像增强就是强化所需要的图像信息,尽量减弱或消除不必要的信息残余,使得人们所需的信息更集中,更丰富。图像增强并不仅仅局限于我们日常生活中的美感需求,图像增强在很多专业领域都是一个十分热门的话题,它反映着这个领域的发展水平,小到手机、摄像机,大到医学显微镜、天文望远镜的电子图,摄像装置的像素越高,说明生产厂商在摄像领域的软硬实力越强,电子图的质量越好,所触及的微观等级也就越高,就能观察到深层次的世界,得出 较为前沿的理论和研究成果。
传统的滤波方法主要是对空间域进行滤波,也就是说传统的滤波方法是直接在图像的灰度值上进行算术处理,比如最简单的中值滤波就是通过提取自身范围内一个区域中各值的中间值,以此来消除零散的噪声,使自身灰度值更接近真实值,达到滤波的效果。还有线性滤波均值滤波,它的工作原理和中值滤波类似,只不过是将中间值改为空间模板的算数平均值,当然人们在均值滤波的基础上做出了不少改进,如扩展出几何均值滤波、算数均值滤波以及可调节参数的谐波均值滤波,并推算出针对椒盐噪声的逆谐波滤波,针对椒盐噪声中的“胡椒”类和“盐粒”类选择不同的Q值进行去噪。人们基于噪声 本身特点设计算法,在知晓噪声模糊函数的情况下,可以采用维纳滤波算法进行去噪,该算法的本质是一种估计算法,所得到的还原图像比较好。
消噪技术旨在实现图像增强,减少图像中的噪声,使噪声对图像的影响程度降到最低,还原本真图像。此次研究主要针对有规律的三种噪声,分别是高斯噪声、椒盐噪声和均匀噪声,其中高斯噪声遵循正态分布,椒盐噪声呈双边极性脉冲,而均匀噪声则是随机分布,最为常见。
1 维纳滤波去噪工作原理
维纳滤波实际上就是一种线性滤波,通过观察原始信号和噪声,得出信号的当前值。
维纳滤波的频率域形式为:

其中,(,)为退化函数,|(,)|=(,) •(,)。S(,)=|(,)|为噪声的功率谱,S (,)=|(,)|为未退化图像的功率谱,在空间域估计值的傅 立叶逆变换中给出。
维纳滤波器的传递函数为:

根据维纳滤波的概念以及算法公式得出维纳滤波具有以下几个性质:
(1)维纳滤波可以自动消除减弱噪声。假设(,)=0时,因为S (,)、S(,)的存在,分母永远不会为零,所以不会存在整式被零除。
(2)由于信噪比较高,即S (,)远远小于S (,)时,S (,)/S(,)很大,因此会出现I(,)无限趋向于1/(,),由此维纳滤波器转变成逆滤波,这也说明维纳滤波存在逆滤波的特殊形式。当S (,)远远小于S(,)时,则I(,)无限趋近于0,此时可以避免逆滤波器造成噪声过大的现象。
(3)维纳滤波不仅需要知道原图像,而且需要知道噪声的功率谱S(,)和S (,)。实际上,S(,)和S (,)都是未知的,这个时候通常用一个常数来代替S(,)/S (,),式(2)变成:

如何确定特殊常数呢?可由平均噪声功率谱和平均图像功率谱的比值得到,设图像的大小为×,则:

2 算法实现及性能预测
实际上在之前的工作原理中已经涉及维纳滤波的算法核心,先读取测试图片的灰度值,确定模型、信噪比、噪声和信号的自相关函数代入计算公式,找出模板,最后将去噪后的图片输出即可。
通过对维纳滤波原理的了解,以及对其算法表达式的分析,可知它并不是通过图像本身的灰度值来进行简单的运算,而是尝试着推算出退化模型,并根据退化图像复原出估计值。它是一种最小均方误差滤波器,具有一定的针对性,在对噪声信息掌握较多,特别是在了解退化函数的空间域模板时,运用维纳滤波能够获得更好的图像效果。相对而言,维纳滤波对图像信息的要求也比较高,所以在对噪声类型及一些具体参数都不是很清楚的情况下运用其进行滤波,效果会大打折扣。为了更加深入地研究维纳滤波,还设计了在运动模糊中实现维纳滤波两种函数wiener2和deonvwnr的比较。
在仿真前先阐明两点:(1)为了能够更全面地测出滤波去噪的效果,依次添加高斯噪声、椒盐噪声以及均匀分布噪声并测试其滤波器的效果;(2)若要更科学、更直观地比较图像去噪效果,需要测量图像的MSE和PSNR。
在图像质量检测方法中,我们通常使用图像逼真度的测量方法,图像逼真度的测量方法是最简单、最快捷的方法之一,主要是将原始图像Y与消噪后的图像X做对比,计算它们之间的误差值,如果消噪后的图像X与原始图像Y的误差较大,说明消噪的效果欠佳,相反,两者之间的误差越小,说明图像越逼真,充分证明所采取的消噪方法适宜 有效。
常用的图像逼真度测量方法参数主要有平均绝对误差(MAE)、均方误差(MSE)、归一化均方误差(NMSE)、信噪比(SNR)和峰值信噪比(PSNR)等。
下面主要介绍MSE、PSNR的计算方法。
图像质量计算的最常用算法之一是均方误差,均方误差的值与图像的质量呈正相关关系,即均方误差的值越小说明图像的质量越好,反之,均方误差的值 越大说明图像的质量越差,均方误差计算表达式为:

但峰值信噪比是值越大图像质量越好,它的表达式为:

其中,、分别代表图形的像素个数,图像的大小即为×,(,)和(,)分别代表原始图像和去噪后图像在点(,)处的灰度值,MAX代表的是图像中颜色的最大值,假设每个采样点(,)用位线性脉冲编码表示,那么就是2,即最大值为2-1,如果每个点(,)表示为8位,那么就是28,即最大值为255,为了便于对比,本次仿真均使用灰度图像,MAX默认为255。
3 实验结果及分析
噪音参数:均值为0,方差为0.05的高斯噪声;概率为0.05的椒盐噪声;方差为0.05的均匀分布噪声。如图1所示为3×3维纳滤波 。
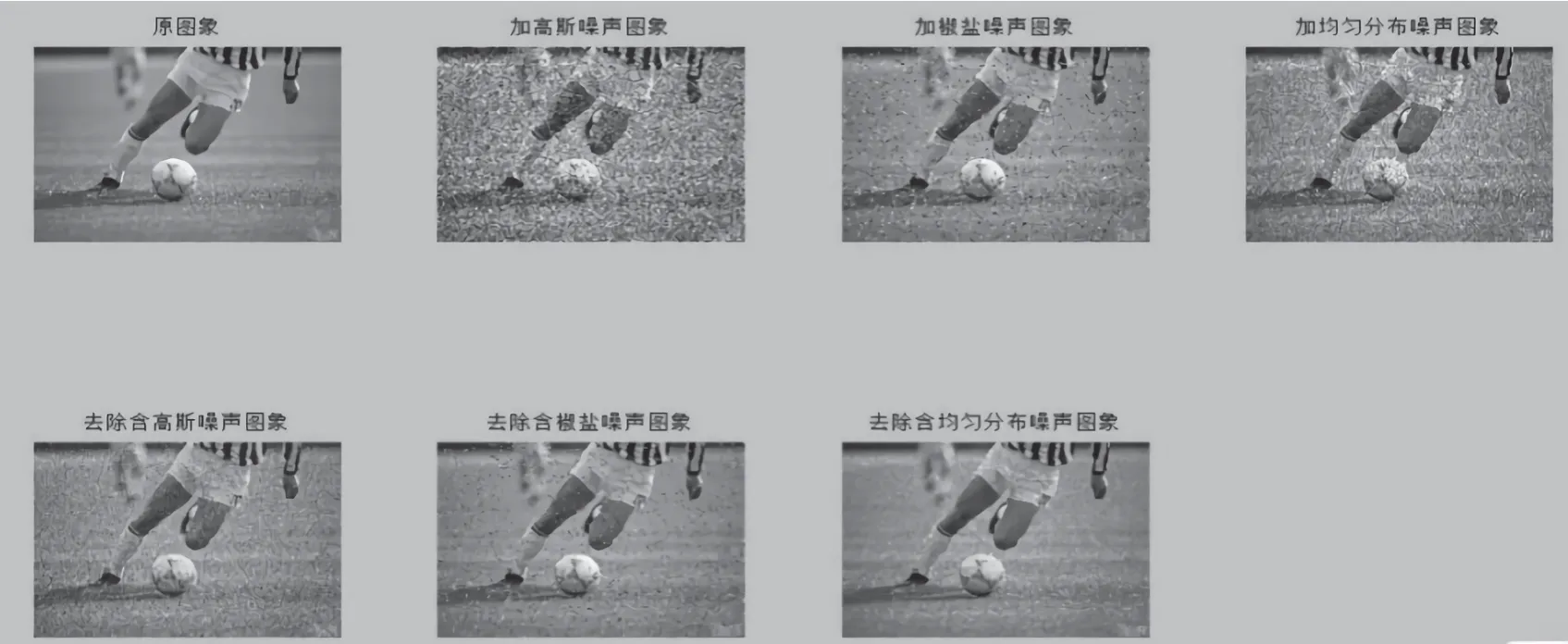
图1 3×3维纳滤波
如图2所示为5×5维纳滤波。

图2 5×5维纳滤波
两者的MSE和PSNR统计分析,如表1所示。

表1 3×3和5×5空间模板的MSE和PSNR
运动模糊图像维纳滤波中wiener2和deonvwnr的比较:
参数:运动位移25像素,角度11,附加均方差0.1的随机噪声。其中deonvwnr拥有3种不同形式。
如图3所示为维纳滤波处理运动模糊噪声图像。
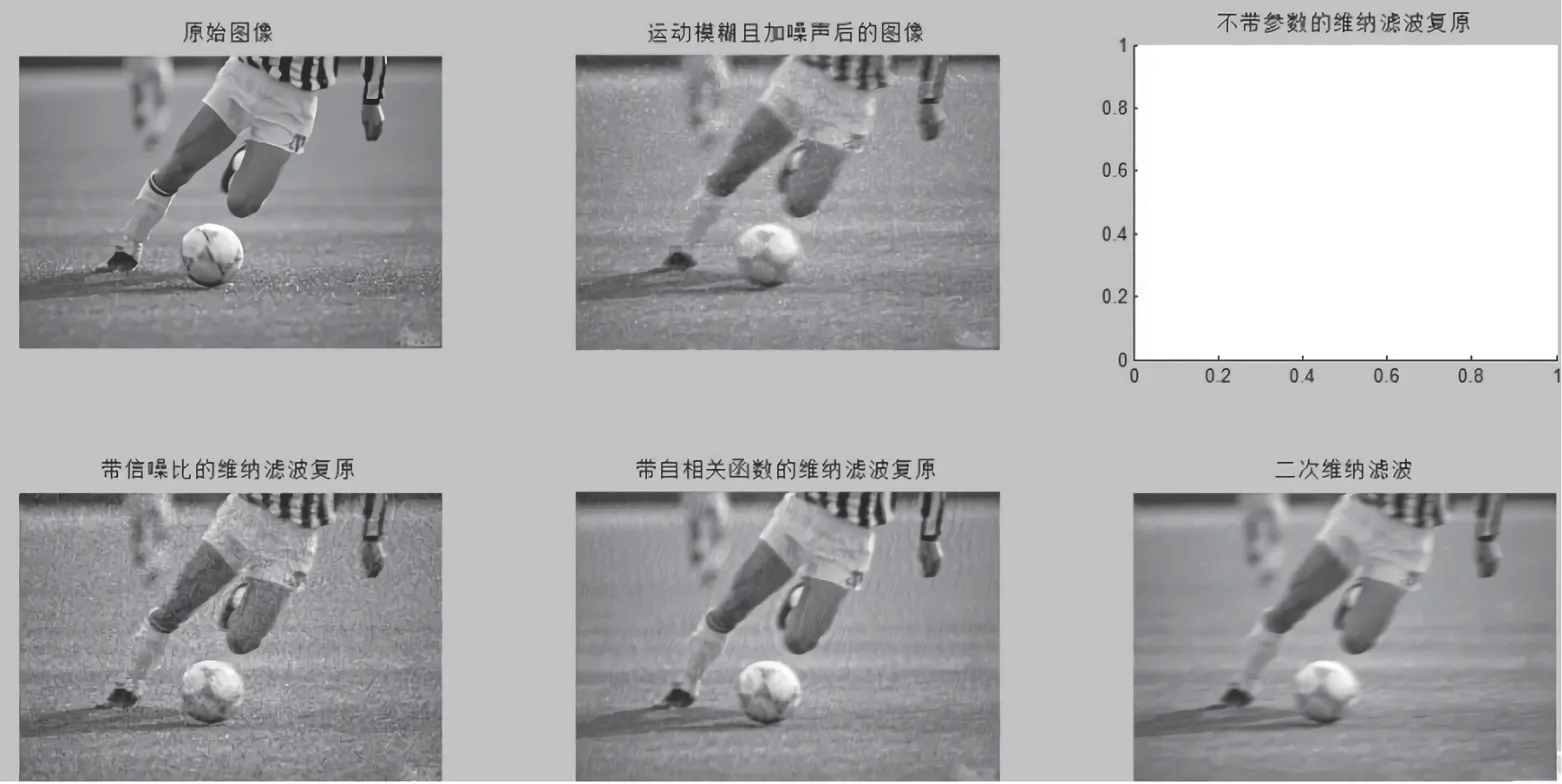
图3 维纳滤波处理运动模糊
由于涉及的参数过多,所以只比较了两个函数中处理相对较好的两个图片进行MSE和PSNR的统计分析,结果如表2所示。

表2 两个函数的MSE和PSNR
通过仿真结果中图像的直观对比以及MSE和PSNR数据的统计分析,得出维纳滤波的一些去噪特性:首先通过纵向对比,我们看到其对高斯噪声和均匀分布噪声的处理效果还不错,但是对于椒盐噪声基本处于毫无作用的等级,并且随着空间模板规模的不断增大,维纳滤波的去噪能力也会随之逐渐增强,细节的保留方面也加强了,不过由于测试规模的局限性,无法测出其继续增大后会造成什么不良后果。而且在处理运动去噪时,在已知运动模糊函数和随机噪声的情况下,通过计算出自相关函数,用deonvmnr进行维纳滤波,效果非常好。同时,与wiener的比较也说明,deconvwnr强调的是图像复原方面的能力,而wiener2更加注重图像的空间域锐化,所以在知道运动函数和噪声模型的情况下,deconvwnr能取得更好的滤波效果。
4 结 论
基于维纳滤波原理,对高斯噪声、椒盐噪声和均匀噪声的消噪能力进行了仿真实验,实验结果表明维纳滤波对不同噪声的消噪能力是有所不同的;处理运动去噪时,在已知运动模糊函数和随机噪声的情况下,deconvwnr和wiener2的消噪能力也是不同的,这说明消噪不是一个简单且盲目的过程,需要区别对待,对不同的需求采用不同的消噪方式,有机结合,合理使用。
从滤波发展趋势来看,较强的适应性以及良好的时频定位特性必将成为图像消噪的首选方法,图像的好坏很大程度是由我们人眼来辨析的,那么从生物学的角度进行算法设计,也是一个不错的研究方向,例如目前流行手机的多摄像头,以及VR技术的生物识别研究。