一种去除ICMOS相机固定模式噪声的方法
2022-08-11严维鹏姚志明宋顾周段宝军
严维鹏,宋 岩,姚志明,宋顾周,段宝军
(强脉冲辐射环境模拟与效应国家重点实验室; 西北核技术研究所: 西安 710024)
ICMOS相机是由像增强器(image intensifier)与CMOS相机耦合而成[1-2],基于像增强器对光强的增强效果,ICMOS相机可拍摄光强较弱时的2维光学图像,且与传统CMOS相机相比,具有更快的读出速度[3-4]。因此,在需要实时获取高速图像时,ICMOS相机更有优势。但ICMOS相机也存在固有的缺点,它的图像传感器一般采用列放大器和列模数转换器(analog to digital converter,ADC),每列各自进行电荷-电压转换,造成多路并行信号之间存在不一致性,使拍摄图像的质量受到固定模式噪声的影响[5-7],如图像灰度值的均匀性分布等。现阶段消除ICMOS相机固定模式噪声主要采用理论建模的方法[8-11],虽在很大程度上抑制了模式噪声,但运算较为复杂,且要求模式噪声服从某种正态分布。本文提出了一种“逐点校正”的方法来消除ICMOS相机的固定模式噪声,设计了实验系统并进行了结果验证。
1 校正方法
本文校正方法的思路是将ICMOS相机传感器的每个像素看作独立的探测器,经过运算消除每个像素点之间的差异性,达到消除固定模式噪声的目的。ICMOS相机工作时,每个像素点在动态范围内接受的入射光强I与输出的灰度值G呈线性关系。根据这一特点,在均匀光源下拍摄图像,调节ICMOS相机像增强器增益及光源与相机之间的距离使图像接近饱和,随后逐渐减弱光源光强并继续拍摄图像,对拍摄的所有图像进行处理后就可得到每个像素对应的I-G曲线。图1为ICMOS相机模式噪声校正原理示意图。
由图1可见,当I=x时,a、b对应的灰度值G为y1和y2,2者之间存在差异性;而当G为y1和y2时,a、b对应同一个x值,消除了a、b之间的差异性。以此类推,对相机的每一个像素点都做这样的处理,即可消除所有像素点之间的差异性。实验时,将图像每个像素点的灰度值与对应的I-G曲线做插值运算,使图像每个像素点对应的灰度值转换为入射光强度,这样就可去除像素点相互之间信号不一致的影响,达到消除固定模式噪声的效果。
2 实验布局
实验采用西北核技术研究所研制的CMOS相机,像元大小为13.2 μm×13.2 μm,像素为1 280×1 024,曝光时间3 ms;微通道板(micro channel plate,MCP)像增强器与CMOS相机之间通过光锥耦合的方式组合。实验系统布局示意图如图2所示。将脉冲氙灯产生的触发信号分为2路,一路用于触发信号源;另一路输入示波器。当信号源被触发时,会产生2个输出信号通道,通道1用于触发CMOS相机,通道2用于触发快门,快门时间为500 ns,快门的检测信号由示波器接收。调整通道2的延时时间,使快门信号处于氙灯信号峰值位置,氙灯和快门输出信号如图3所示。其中:1为氙灯输出信号;2为快门输出信号。
3 实验步骤
实验开始前,面对ICMOS相机,将脉冲氙灯放在在一定距离处,使氙灯发出的光覆盖整个像增强器光阴极。将ICMOS相机加电15 min至相机背景噪声达到平衡。首先,在氙灯上放置45A的衰减片,逐步提升像增强器增益,直到图像饱和,固定像增强器增益;然后放置一系列衰减系数逐渐减小的衰减片,直到ICMOS相机拍摄的图像为本底,在同一衰减片下,拍摄10幅图像,每2幅图像时间间隔为5 s,对所得图像求和取平均值以减小随机偏差。不同型号的衰减片对应的衰减系数,如表1所列。不同型号衰减片下ICMOS相机获得的图像如图4所示。

表1 不同衰减片型号对应的衰减系数Tab.1 Attenuation coefficient corresponding to different types of attenuation slice

(a) 45A
由图4可见,中心区域偏亮,周围区域偏暗,且图像中出现条纹,说明相机固有模式噪声对拍摄图像质量有较大的影响。选取图4中较亮区域和较暗区域内的3个点,其I-G变化曲线如图5所示。由图5可见,每个像素点I-G曲线都是线性变化的,但斜率之间有差别。
4 算法应用效果及评价
均匀光源下拍摄的图像校正前后的对比,如图6所示。图6(a)为在氙灯前放置衰减系数为17%的衰减片,拍摄得到的图像。由图6(a)可见,图像各处灰度值存在较大差异,且有固定模式噪声干扰,中心区域灰度明显高于周围区域。采用1节所述方法对图6(a)做校正处理,结果如图6(b)所示。由图6(b)可见,校正后图像各处灰度值差异较小,固定模式噪声被去除。固定校正前后图像的某一行并计算灰度值的变化情况,如图6(c)所示。由图6(c)可见,校正后图像的灰度值起伏明显减小,约为4%,表明图像各处基本均匀,校正达到了效果。
图6(a)中所示5个区域校正前后灰度值的相对偏差计算结果如表2所列。由表2可知,校正后图像灰度值的相对偏差均为10-3量级,与校正前相比,至少小了一个量级,表明校正后图像各处基本达到了均匀,验证了本文校正方法的可行性。
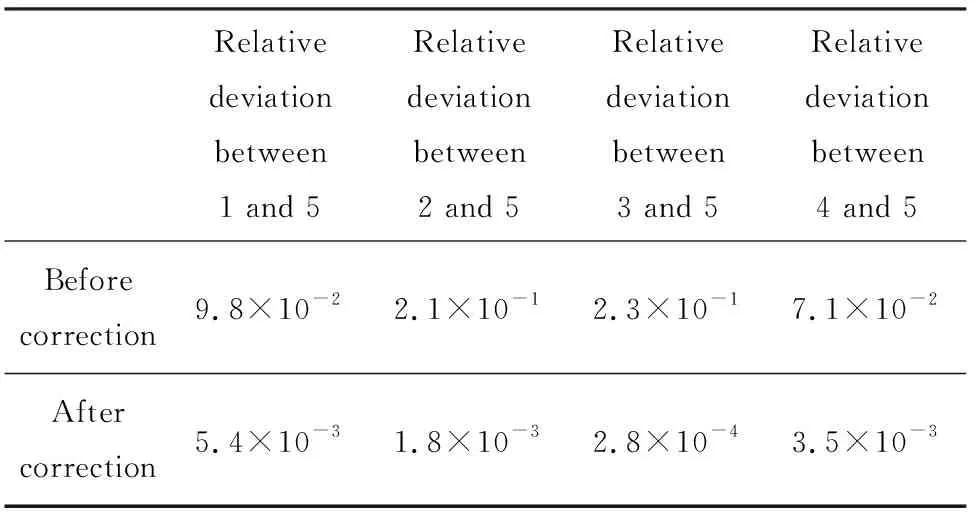
表2 图6(a)中5个区域校正前后灰度值的相对偏差计算结果Tab.2 Calculation results of relative gray level deviation of 5 areas before and after correction in Fig.6(a)
此外还研究了相机固定模式噪声对图像分辨率的影响。固定模式噪声校正前后图像的分辨率对比结果,如图7所示。由图7可见,校正前后虽分辨率均为2 lp·mm-1,但与校正前相比,校正后的图像清晰可见。计算得到校正前后的对比度分别为0.3和0.5,表明本文的校正方法可使图像质量得到明显改善。
5 结论
本文提出了一种校正ICMOS相机固定模式噪声对图像质量影响的方法。在氙灯光源前放置不同衰减系数的衰减片,使用ICMOS相机获得一系列图像。将拍摄图像的每个像素点的灰度值与对应的I-G曲线做插值运算,将灰度值转换为入射光强度,去除像素点之间的差异,从而校正ICMOS相机固定模式噪声对图像质量的影响。实验结果表明,校正后图像质量得到明显改善,固定模式噪声影响显著下降。与校正前相比,校正后图像灰度值的相对偏差至少小了一个量级,验证了本文提出的校正方法的可行性。本文为ICMOS相机拍摄图像的固定模式噪声处理提供了一种解决方案。
