BDS/GPS载波相位差分定位测试与精度分析
2022-08-10王天文
王天文
(沈阳市勘察测绘研究院有限公司,辽宁 沈阳 110004)
1 引 言
20世纪80年代,中国部署了“三步走”的北斗卫星导航系统发展战略:第一步是建设北斗一号系统。1994年到2003年共发射了三颗卫星;第二步是建设北斗二号系统。2004年,北斗二号系统工程启动。2012年,共发射和组网14颗卫星;第三步是建设北斗三号系统。2020年6月23号,完成北斗三号卫星全球组网,全面建成北斗三号系统。北斗三号系统继承了主动服务和被动服务两大技术体系,为全球用户提供定位、导航、授时、全球短信通信和国际搜救服务。同时,可为中国及周边地区的用户提供卫星增强、基础增强、精密单点定位和区域短消息通信服务。计划到2035年,以BDS(BeiDou Navigation Satellite System,BDS)[1]为核心,建设广泛、集成的国家综合定位导航授时服务系统[2,3]。
RTK(Real-Time Kinematic,RTK)是利用卫星导航系统的载波相位观测数据进行实时动态相对定位的技术。载波相位差分技术采用差分法实时处理两个测量站的载波相位观测,并将参考站采集的载波相位发送给用户接收机计算坐标。载波相位差分定位技术以其高精度、高速度、高精度等优点,被广泛地应用于军事、农业、船舶等精密定位领域,给人们的日常生活带来极大的便利[4]。
本文从理论角度研究了GNSS(Global Navigation Satellite Systems,GNSS)[5]差分定位理论方法和大气误差处理方法,从实验角度研究BDSRTK定位结果及其模糊度固定效率,然后对GPS(Global Positioning System,GPS)以及GPS/BDS双系统融合定位结果进行比较,分析了三者之间模糊度固定效率及其定位结果精度上的差异。
2 载波相位差分定位原理
2.1 BDS/GPS非差观测方程
非差观测方程直观描述了原始观测值与估计参数等误差参数之间的相互关系。伪距观测值和载波相位观测值的非差观测方程为[6,7]:

2.2 BDS/GPS双差误差方程
对于参考站和流动站而言,由于非差观测值中存在许多时空相关性很强的误差,因此可以采用差分相对定位的方法来消除或削弱一些时空相关性强的误差[8,9],进而得到更精确的定位结果。本文采用双差观测模型进行基线解算,对于卫星p、q,测站r、k,其双差误差方程如下[10]:
式中,Δ和∇为差分算子,其余参数与式(1)和式(2)相同。
大气误差是影响基线解算的主要因数之一。采用差分模型能够消除或削弱大气误差的影响。在短基线下(≤10 km),流动站与基准站之间大气误差呈现强相关特性,因而无需考虑双差大气误差延迟的影响,然而随着基线长度的增加,两站之间相关性减弱,通过差分方法已经无法很好地消除该影响,需设置大气误差参数解算大气误差,或采用无电离层组合削弱电离层延迟对定位结果的影响。
2.3 大气误差处理模型
大气误差是基线解算必须考虑的因素之一,其包括以电离层延迟为主的色散性误差和以对流层延迟为主的非色散性误差,两种误差可通过差分进行削弱,但是随着基线长度的增加,该影响成为限制常规RTK定位精度和可靠性的主要影响之一[11-13]。以对流层延迟为主的非色散性误差分为干分量和湿分量,其中干分量变化稳定,可以采用Saastamoinen模型[14,15]进行改正,湿分量变化不稳定,常规处理方式为将其作为未知参数分段进行处理。
电离层延迟误差是中长基线RTK定位解算必定考虑的一个重要参数,尽管采用非差非组合的方式对电离层延迟误差有一定的削弱,但是随着基线长度的增加,基准站和流动站之间误差的相关性减弱,对模糊度的解算以及可靠性产生的影响不可忽略。对此采用电离层加权模型,电离层延迟误差与频率的无关性使得每颗卫星都具有一个电离层延迟误差参数,处理时系数可通过不同频率之间的关系得到。若参考站与流动站之间距离较短,则大气误差对定位结果的影响可以忽略不计,即不考虑电离层延迟误差和相对天顶对流层延迟误差。
3 实验分析
3.1 实验信息
本文采用数据为实测数据,实测数据均包括BDS、GPS卫星数据。其具体实验数据信息如表1所示。

表1 实验数据信息
3.2 结果分析
利用本文方法对三组实测数据进行载波相位相对定位的数据处理。鉴于短基线下两站之间的强相关性,因而忽略大气误差的影响。在中长基线解算时,大气误差中非色散性误差为主要误差,电离层延迟误差影响不可忽略,与对流层延迟误差作为待估参数参与解算。模糊度解算采用LAMBDA方法搜索整周模糊度[16-22]。在解算数据时,分别对单系统和组合系统进行解算,分析其各自定位结果精度并进行比较。对于数据中出现的周跳,只进行探测不修复。
3.2.1 超短基线
短基线A的观测的时间长度为40 min,高度截止角设置为15°。对GPS/BDS卫星颗数时间变化作图,如图1所示。图2为PDOP(Position Dilution of Precision, which is a measure of X, Y, Z position geometry)位置精度强弱度值时间序列图。

图1 短基线卫星数目变化

图2 短基线PDOP值变化
从图1中可以看出,BDS单系统可观测到的卫星数目稳定在8颗左右;GPS单系统在10颗左右;BDS/GPS组合系统可以观测到的卫星数目则在18颗左右。由此可以分析出,GPS/BDS组合观测到的卫星数目大概为各系统单独观测数目的两倍,卫星数目的增多不仅增大了可选择卫星的个数,提供了更多的可以使用的观测数据,更可以提供更好的空间结构,使最后的结果更加准确。
从图2中可以看出,BDS单系统的PDOP值在2.5左右变化;GPS单系统则在1.8左右发生变化;BDS/GPS组合系统的PDOP值则稳定保持在1.5左右,并没有显著变化。这三者的PDOP值均可以保持在3以下,因此都符合标准,但是同样可以看出,由于BDS单系统可以观测到的卫星数目少于GPS单系统,因此其构成的空间结构也并不如GPS单系统稳定,而两种系统组合的情况下,其空间结构最为稳定,变化幅度很小。
图3为GPS、BDS单系统以及GPS/BDS组合系统解算模糊度所得到的Ratio值时间变化图。从图3中可以看出,BDS单系统的Ratio值稳定在100左右,较高的部分可以达到200~400,最小为30;GPS单系统的Ratio值稳定在300左右,较高的部分可以达到500~1 000之间,最高的部分在1 000~4 000之间,最小也达到了50;BDS/GPS组合系统的Ratio值稳定在100左右,较高的部分在200~300之间,最小值为25。由此可以看出,这些Ratio值均远大于可以作为解出固定解的标准数值3,表示结果均为固定解。

图3 短基线Ratio值变化
图4(a)选取的为BDS系统的C03号卫星,图4(b)选取的为GPS系统的G01号卫星。BDS、GPS单系统以及GPS/BDS组合系统的模糊度固定成功率均为100 %,因此选取其中具有代表性的两颗卫星来分析,从图4中可以看出,C03号卫星的浮点解与固定解偏差在±0.5周范围以内,G01号卫星的浮点解与固定解偏差也在±0.5周范围以内。由此可以分析出,这两者均可以快速固定其整周模糊度。
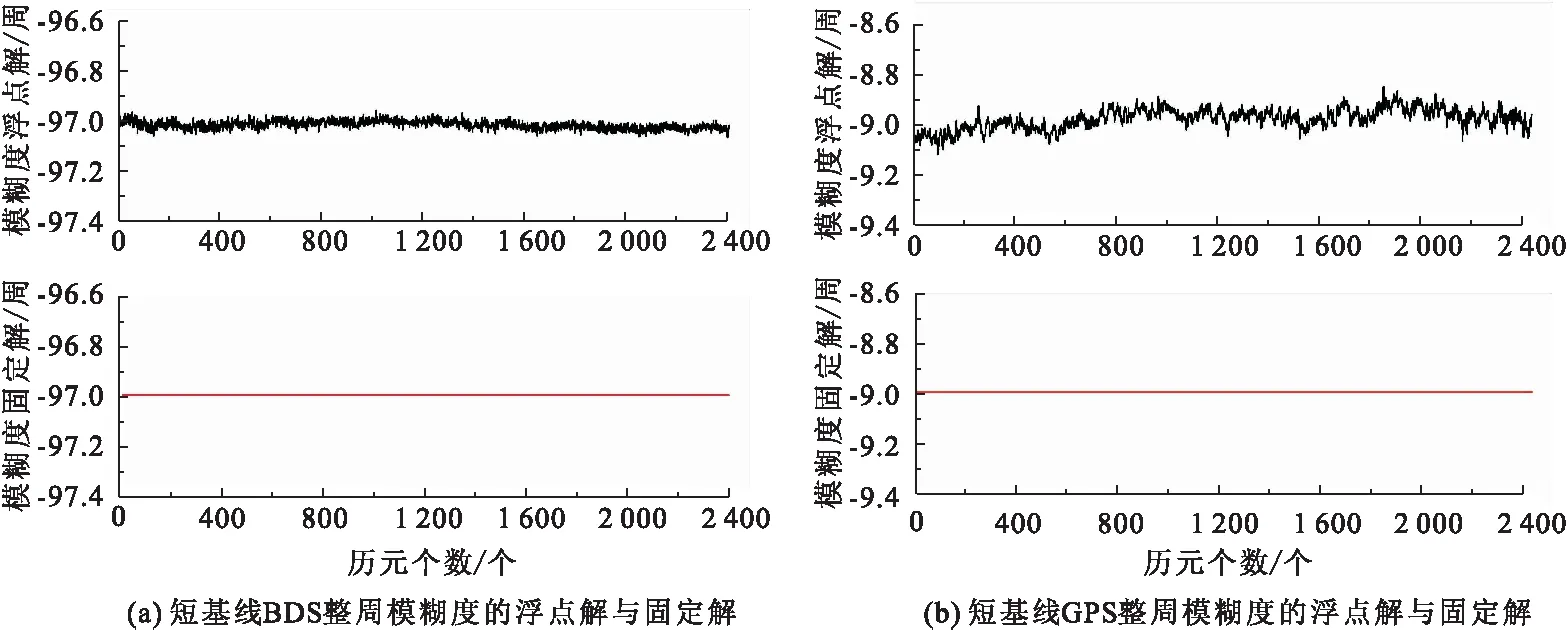
图4 短基线BDS与GPS整周模糊度的浮点解与固定解
从图5中可以看出,BDS与GPS单系统在E、N、U方向上的精度都可以保持在cm级,但是U高程方向与E、N水平方向相比较其偏差幅度较大一些。BDS单系统在U方向上为cm级精度,根据图5所示,定位偏差波动大致在2~3 cm以内,而GPS单系统在U方向上虽然也为cm级精度,但是其定位偏差波动大致在1 cm左右徘徊,效果比BDS单系统更好。
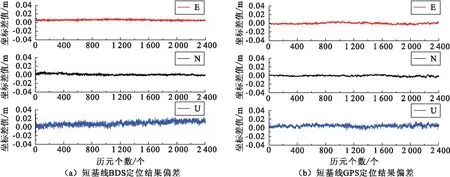
图5 短基线BDS与GPS定位结果偏差
从图6中可以看出,GPS/BDS组合系统在E、N水平方向上的精度已经到达cm级,在U方向上虽然较其他两个方向差一些,但是相较于单系统来说,效果更好。

图6 短基线GPS/BDS组合定位结果偏差
从表2中可以看出,GPS单系统的RMS值在E以及U的方向是优于BDS单系统的,分析其原因,可能是其可观测到的卫星数目比较多,卫星空间结构更好。而在组合系统方面,总体上可发现在50 m短基线RTK定位中GPS单系统定位精度较高,加入BDS系统组成BDS/GPS组合系统对于定位精度并没有显著提升,甚至影响到E、U水平方向的精度,分析可能为采用的部分BDS卫星数据质量问题,影响了BDS/GPS组合系统的定位精度,但是通过对比BDS单系统定位精度可发现BDS/GPS组合系统有着显著的提升效果,其U高程方向上的精度提高了30 %,E、N水平方向提升了50 %,BDS/GPS组合系统整体精度较BDS单系统提高了很多。
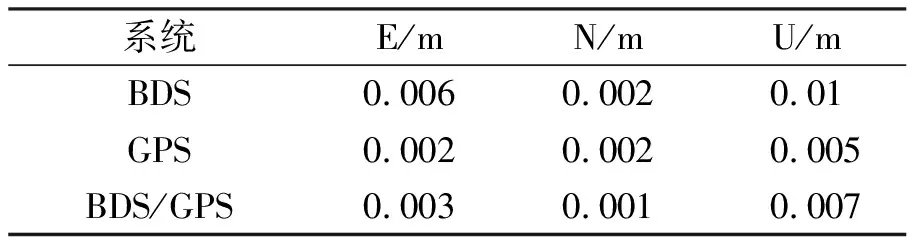
表2 基线A三个方向上的RMS值
3.2.2 基线B(中基线)
基线B的观测的时间长度为35 min,高度角设置为15°,采样间隔为1 s。
从图7中可以看出,BDS单系统可观测到的卫星数目稳定在9颗左右;GPS单系统可观测到的卫星数目在7颗左右;GPS/BDS组合系统可观测到的卫星数目则在16颗左右。

图7 中基线卫星数目变化
从图8中可以看出,BDS单系统的PDOP值在2.3左右变化;GPS单系统则平均在1.9左右发生变化;GPS/BDS组合系统的PDOP值则稳定保持在1.4,并没有明显变化。这三者的PDOP值均在3以下,因此都符合标准,但是同样可以看出,虽然BDS单系统可以观测到的卫星数目比GPS单系统多,其构成的空间结构却并不如GPS单系统稳定,而两种系统组合的情况下,其空间结构最为稳定。
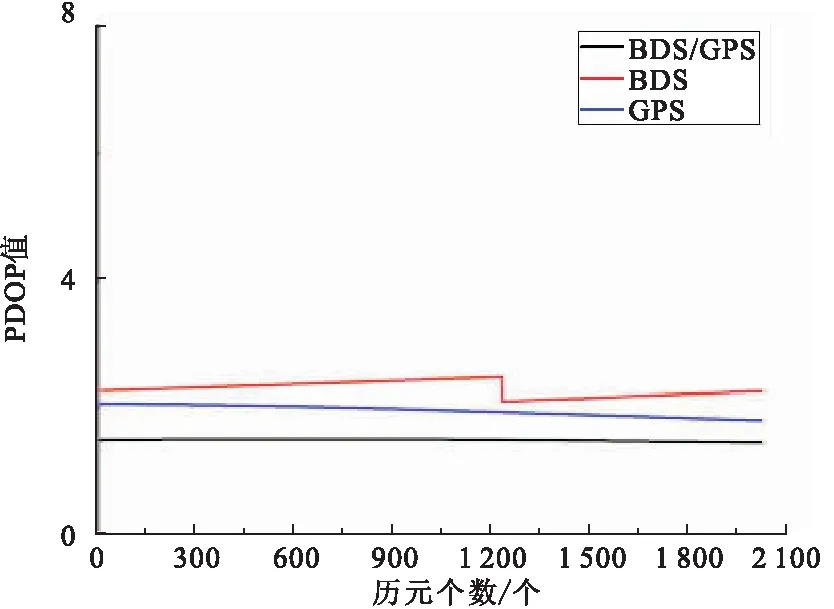
图8 中基线PDOP值变化
从图9中可以看出,BDS单系统的Ratio值稳定在100左右,较高的部分可以达到200~300之间,最小为47;GPS单系统的Ratio值稳定在200左右,较高的部分可以达到500~1 000之间,最小也达到了20;GPS/BDS组合系统的Ratio值稳定在100左右,较高的部分在200~300之间,最小值为17,均远大于3,均满足固定解的要求。
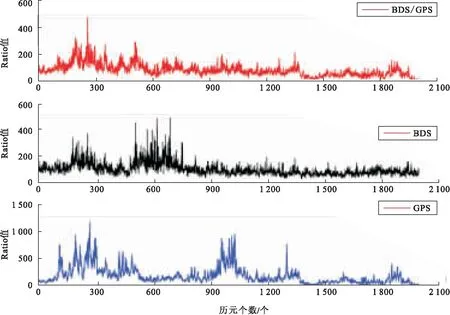
图9 中基线Ratio值变化
图10(a)选取的为BDS系统的C09号卫星,图10(b)选取的为GPS系统的G29号卫星。BDS、GPS单系统以及GPS/BDS组合系统的模糊度固定成功率均接近于100 %,同样选取其中具有代表性的两颗卫星来分析,从图10中可以看出,C09号卫星的浮点解与固定解偏差在±0.5周范围以内,G29号卫星的浮点解与固定解偏差也在±0.5周范围以内。
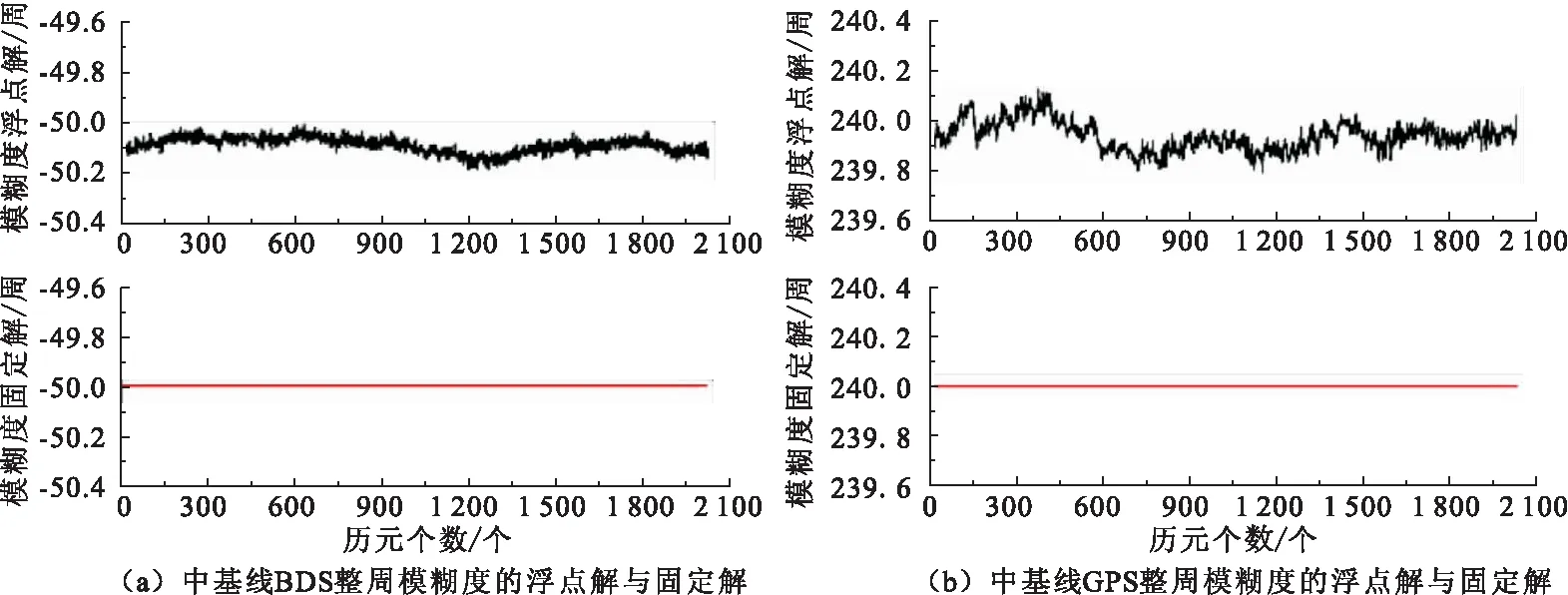
图10 中基线BDS与GPS整周模糊度的浮点解与固定解
从图11中可以看出,BDS与GPS单系统与BDS/GPS组合系统在E、N、U方向上的精度都可以保持在cm级,且可以较为明显地发现BDS与GPS单系统在E、N水平方向定位偏差波动较为稳定,在U高程方向BDS与GPS单系统定位偏差波动较为明显,BDS单系统U方向定位偏差波动在2~8 cm,GPS单系统U方向定位偏差波动在1~5 cm,从图12中可以看出,GPS/BDS组合在E、N、U方向上的偏差虽然仍处于cm级,与GPS单系统的精度相当,但与BDS单系统相比较,可明显发现其U高程方向定位精度效果更好。
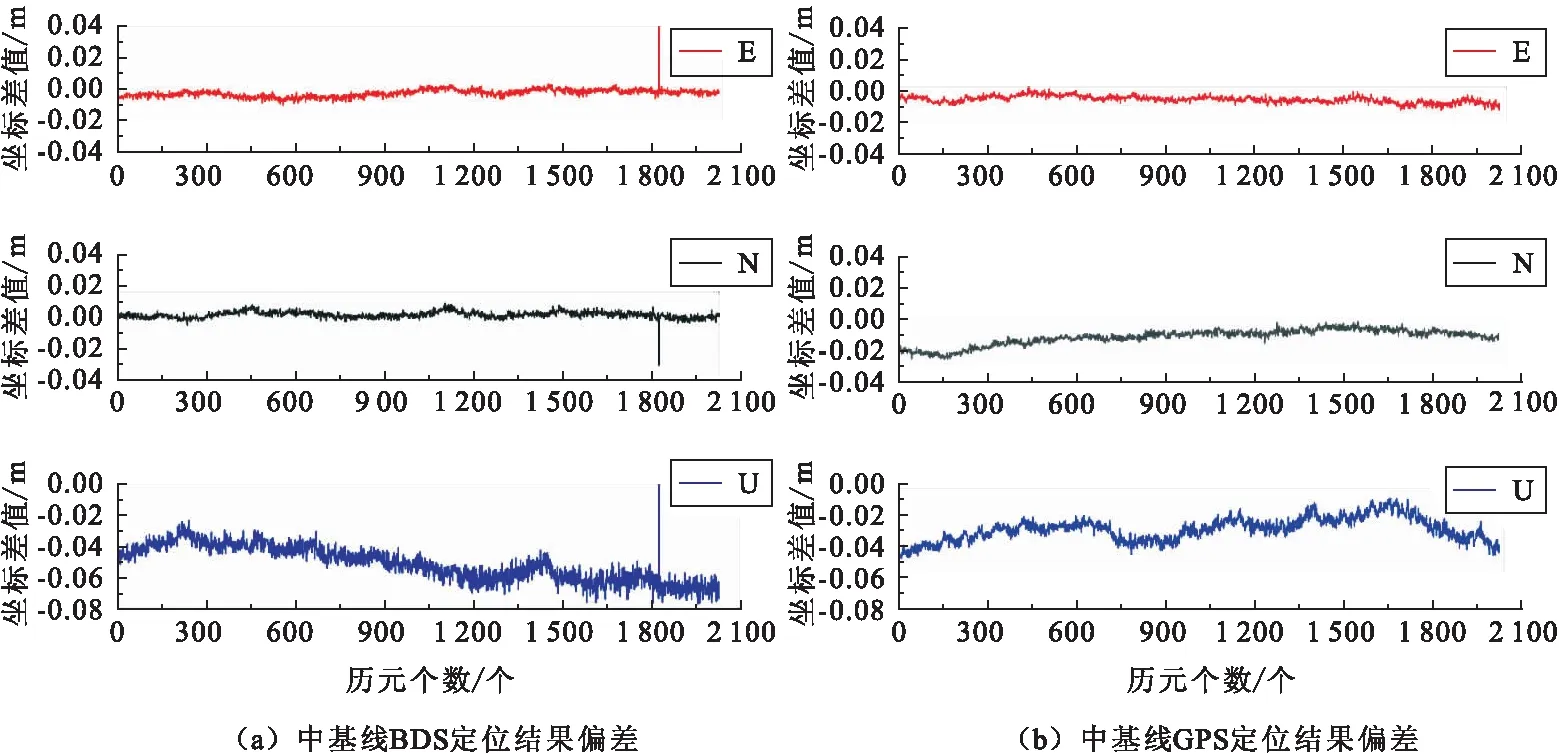
图11 中基线BDS与GPS定位结果偏差

图12 中基线GPS/BDS组合定位结果偏差
从表3中可以看出,BDS、GPS单系统与BDS/GPS组合系统在E、N水平方向上的定位精度较好,RMS值均达到了毫米级;在U高程方向BDS单系统略差,RMS值为5 cm,GPS单系统和BDS/GPS组合系统定位精度相当,RMS值为3 cm,均优于BDS单系统,BDS/GPS组合系统与BDS单系统相比较提升了40 %。分析其原因,可能是BDS单系统可观测到的卫星数目比较多,水平方向定位精度较好,但是总体上可发现U方向上的精度略差,相较而言,BDS/GPS组合系统整体精度提高了很多。
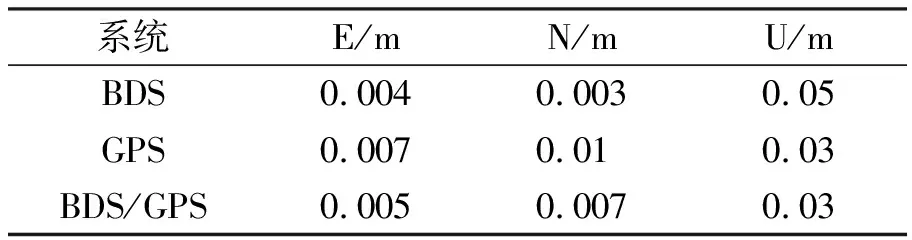
表3 基线B三个方向上的RMS值
3.2.3 基线C(长基线)
基线C的高度角设置为15°,采样间隔为1 s,不过因为基线较长,所以适当延长观测时间为100 min,在进行基线处理之前,同样需要先对数据进行预处理,去掉含有周跳的观测值。
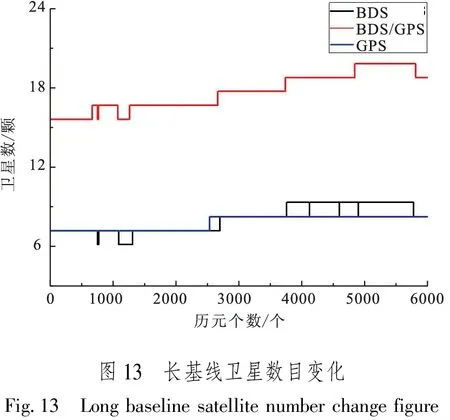
从图13中可以看出,BDS单系统观测到的卫星数目平均在9颗左右;GPS单系统则是在8颗左右;GPS/BDS组合系统可以观测到的卫星数目则在18颗左右。
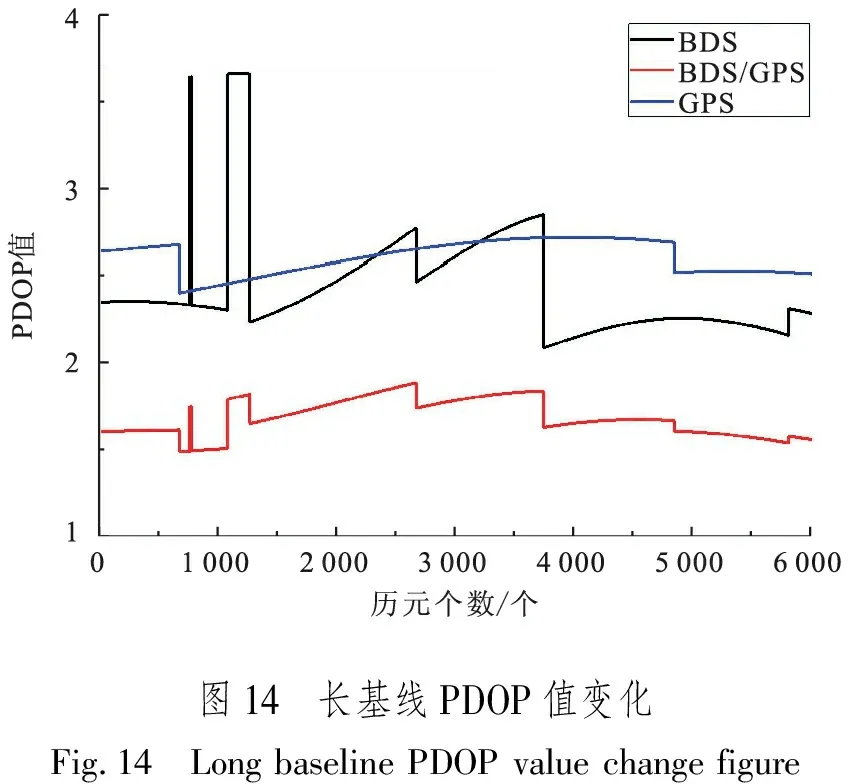
从图14中可以看出BDS单系统的PDOP值在2.45左右变化;GPS单系统在2.4左右发生变化;GPS/BDS组合系统的PDOP值为1.64。这三者的PDOP均值虽然均在3以下,但是却可以明显看出其相对于短基线来说,变化更加剧烈,同时可以观察到,GPS/BDS组合系统的曲线变化大致为另外两种系统变化的组合形式,只是波动幅度小了很多。
BDS单系统的模糊度率为94.13 %,GPS单系统则为91.75 %,两者的组合系统为95.88 %,从图15中可以明显看出,GPS/BDS组合系统成功率高于BDS,BDS单系统高于GPS单系统。

从图16中可以看出,BDS单系统与GPS单系统在E、N、U方向上面的精度在第500个历元之后均可以保持在cm级,但是这两者在U高程方向上的定位偏差波动比E、N水平方向较大一些。从图17中可以看出,GPS/BDS组合系统在E、N、U方向上在250个历元之后即可保持在cm级,收敛速度更快,且定位偏差波动比单系统效果更好。

图16 长基线BDS与GPS定位结果偏差
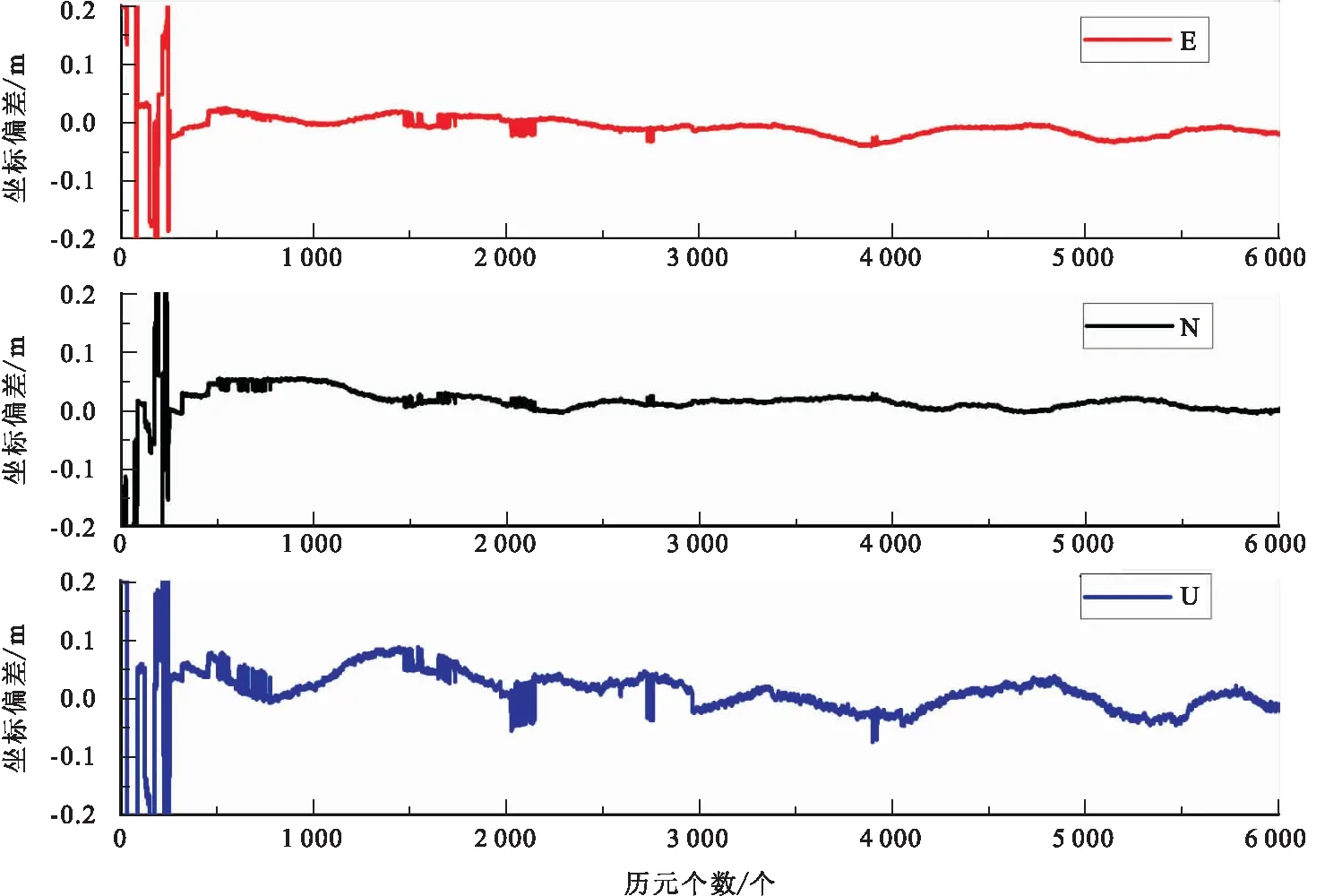
图17 长基线GPS/BDS组合定位结果偏差
从表4中可以看出,BDS单系统以及GPS单系统在E、N水平方向的精度大致相等,E方向定位精度RMS值均优于1.7 cm,N方向定位精度RMS值均优于2.3 cm,U方向可以保持在4 cm左右;组合系统虽然在E、N水平方向的精度略优,但是提升效果不显著,其在U高程方向上的精度提升效果较好,基本保持在3 cm,相对于BDS单系统的提升效果约26 %。
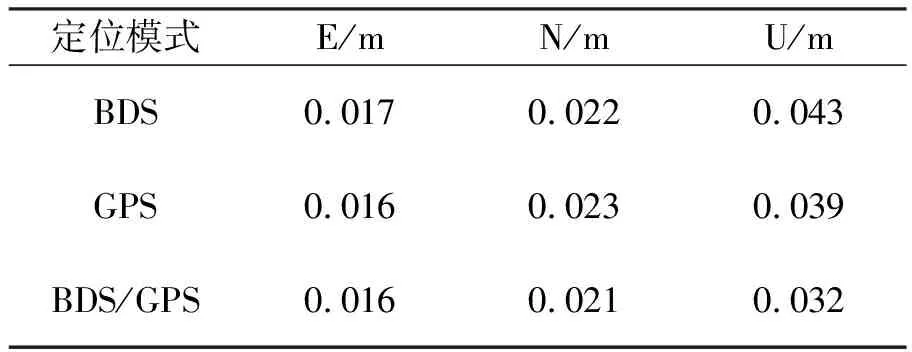
表4 基线C三个方向上的RMS值
4 结 论
1)经过分析得出,当基线较短时,模糊度固定的成功率较高,且BDS单系统的E、N水平方向上的精度与GPS单系统以及GPS/BDS组合系统一致,定位结果优于cm级;虽然在U高程方向上的精度虽然也为cm级,但较E、N水平方向相差较多,较GPS单系统以及GPS/BDS组合系统差距明显。BDS/GPS组合系统与BDS单系统相对比有着显著的提升效果,其E、N水平方向提升效果最大约50 %,U高程方向上的精度提升效果最大约40 %。
2)当基线较长的时候,BDS单系统的模糊度固定成功率要优于GPS单系统,但是小于GPS/BDS组合系统,在E、N水平方向上的精度与GPS单系统大致相当,略差于GPS/BDS组合系统;在U高程方向上的精度为cm级,相较于GPS单系统与GPS/BDS组合系统有较大差距,BDS/GPS组合系统与BDS单系统相比,精度提升效果约26 %。
