变掠翼巡航导弹气动特性及最优掠角分析
2022-08-10王明亮吴威涛曹钦柳
王明亮,吴威涛,封 锋,向 熙,曹钦柳
(南京理工大学 机械工程学院, 南京 210094)
1 引言
传统的巡航导弹一般只有固定的气动外形,无法根据不同的弹道段飞行任务保持最佳的气动性能。基于这一背景,变掠翼巡航导弹的概念应运而生。变掠翼是为满足飞行器高适应性的需求,机翼根据飞行工况改变的一种变体控制方案。变掠翼控制方式在战机上已有较多实例,变掠翼巡航导弹通过整体改变掠翼角度,使导弹能在适应多弹道段需求,并在多种工况下保持飞行效率和性能最优。变掠翼巡航导弹与变体飞行器类似,存在以下主要问题:气动外形的变化给飞行器带来了气动特性的增益,采用什么变形规律可以使飞行器在不同工况下气动特性最优;为了实现飞行器气动外形的变化,内部变形机构必不可少,同时,增加了飞行器质量,增加了飞行器的复杂度。
针对飞行器内部变形机构的问题,变体飞行器在总体设计、智能蒙皮材料及内部机构设计等关键技术已经取得良好进展。针对气动外形的变化给飞行器带来气动特性增益的问题,变体飞行器在气动特性变化、机翼弹性形变影响、机翼变化引起气动力瞬变问题及颤振特性已经在设计初期得到了广泛的关注。
在本文中,针对采用什么变形规律可以使飞行器在不同工况下气动特性最优的问题,根据数值计算所得的气动特性数据,创新的结合遗传算法寻优,确定了不同工况下最合适的掠翼掠角,为未来变体飞行器寻找最优变化规律提供了思路。结合变后掠飞行器的研究现状,基于文献中的巡航导弹弹身设计了一种变掠翼巡航导弹,研究掠翼角度变化对导弹气动特性的影响,解决了气动外形的变化给飞行器带来了什么样的气动特性增益的问题。对变掠翼巡航导弹在亚声速、低超声速的飞行工况进行了数值计算,得到导弹头部、中部掠翼、尾翼部分的流场分布规律,分析其气动特性变化情况,根据不同的飞行工况,调整弹翼后掠角,优化巡航导弹在亚声速、低超声速飞行的升阻特性。
2 变掠翼巡航导弹的模型建立及数值模拟
2.1 变掠翼巡航导弹的模型建立
结合国内外超声速巡航导弹的气动外形,弹头与弹尾均为抛物线式旋转体设计,弹径为680 mm。弹翼选用NACA0012为翼型曲线,分布在弹身中段。尾翼采用平板式设计,厚度为5 mm。掠角=40°的变掠翼巡航导弹结构图如图1所示。变掠翼巡航导弹的变形方式为掠翼翼尖沿轴旋转,其中最小掠角=0°,最大掠角=40°,掠角变化过程如图2所示。
2.2 数值模拟
流场域采用六面体结构网格,远场为圆柱形,其直径为弹体直径的28倍,远场前端距离导弹头部为8倍弹径,底端距离导弹尾端15倍弹径,流体域被分为15×5×5个区域。以=40°变掠翼巡航导弹为例,整体计算域网格如图3(a)所示。超声速工况下的弹身周围数值变化剧烈,在弹头、尾翼前端进行了加密,设置了包裹弹身的附面层网格,附面层高度为5 mm,网格节点数为12,弹体第一层网格为1,满足SST-湍流模型对网格的要求。六面体网格数约为250万,弹头加密区域如图3(b)所示,弹尾加密区域如图3(c)所示。
图1 40°掠角变掠翼巡航弹结构示意图
图2 掠角变化过程示意图
图3 网格分布示意图
选取=10°变掠翼巡航导弹模型,通过改变网格密度,分别生成了数量为150万、250万及350万的三维网格。测试工况为马赫数=30,攻角=4°,计算后的气动参数如表1所示。在150万网格情况下,增加网格各线段节点数对计算结果影响较小,误差均在小数点后的第三位。由于不同掠翼,各三维模型略有不同,本研究最终确定网格数量在150~250万,以此开展后续数值计算。
表1 各网格数量计算得到的升、阻力系数
采用标准弹箭模型ANBF(army navy basic finner)对计算采用的数值方法进行验证,计算结果与文献实验结果如图4所示。标准弹箭模型的弹头、弹身及尾翼处与变掠翼巡航导弹的气动外形相似,由于变掠翼巡航导弹在弹身两侧存在掠翼,单一的标准弹箭模型并不足以验证数值方法的准确程度,为了保证掠翼处数值计算准确,选用RAE2822翼型对计算采用的数值方法进行验证,工况为=073,=279°,计算结果与实验结果如表2所示。由曲线图4及表2对比可知,计算得到的阻力系数和升力系数导数与实验数据吻合很好,计算结果较为准确。因此,在本文中选取的湍流计算模型及网格划分加密区域设置是稳定合理的。
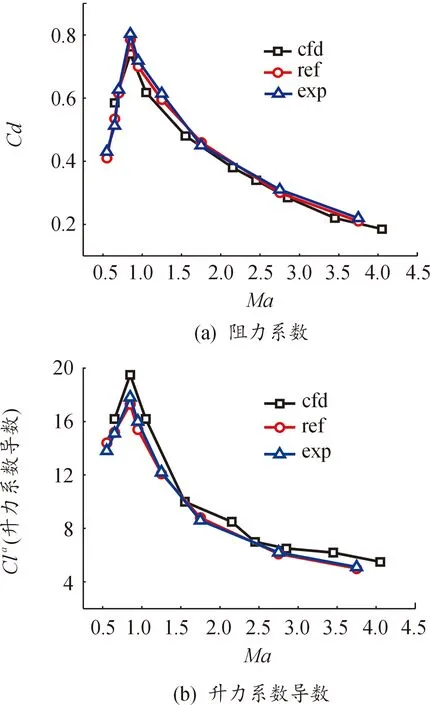
图4 计算结果与文献实验结果曲线
3 变掠翼巡航导弹气动特性分析
变掠翼巡航导弹数值仿真中分别对5个掠角、5个攻角、5个马赫数共125个飞行状况进行了计算,分析变掠翼巡航导弹在亚声速、跨声速及超声速工况下的外流场情况及气动特性参数,具体工况参数如表3所示。

表2 RAE2822翼型气动特性计算值与实验值
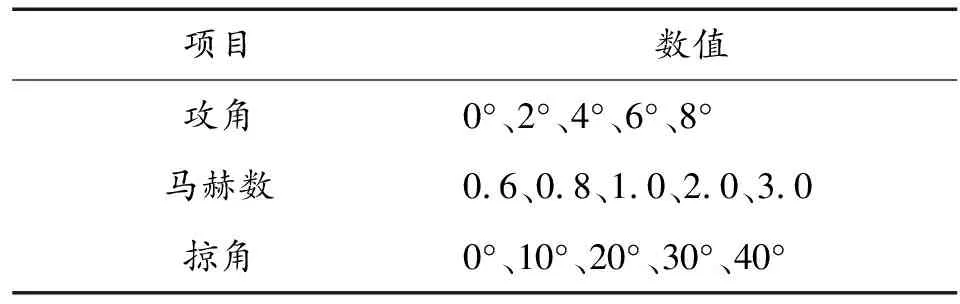
表3 数值仿真工况参数
工况为=06,=4°,=0°和40°变掠翼巡航导弹的外流场压力如图5所示。在=0°时变掠翼巡航导弹在导弹头部、掠翼前端、尾翼前端的压力值较高。而掠角=40°时,仅在靠近弹身端的翼尖处有较高的压力值。

图5 工况为Ma=0.6的变掠翼巡航导弹的 外流场压力分布云图
图6为=30,=4°,=0°和40°变掠翼巡航导弹的外流场压力图。在=30时,在弹体周围已经有明显的激波存在。此时,=0°变掠翼巡航导弹的掠翼展开长度较长,弹翼压力明显高于=40°变掠翼巡航导弹,其尾翼区域流场并未受掠角变化的影响,如压力云图6所示。
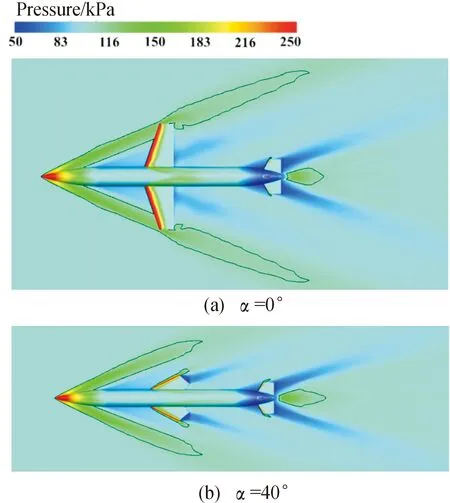
图6 工况Ma=3.0为变掠翼巡航导弹的外流场 压力分布云图Fig.6 Pressure diagram of external flow field of variable swept cruise missile under working condition Ma=3.0
图7给出了3个马赫数、3个弹翼后掠角度工况的阻力系数、升力系数和升阻比随着攻角的变化情况。机翼掠角对巡航导弹的升力系数随攻角变化的速率也有较大影响。掠角越小,机翼面积越大,相同工况下导弹的升力系数及其变化速率较大,且马赫数越大,升力提升情况越明显。在亚声速工况下,掠角越小时升力越大,在工况为=06,=8°时,=0°时的升力比=40°时高达47;低超声速工况下,展开掠翼,在工况为=2,=8°时,=0°的升力比=40°时高26,如图7(a)所示。
随着马赫数的增加,各掠角下的变掠翼巡航导弹阻力均明显增大。掠角对弹体阻力系数斜率有较大影响,掠角越小,巡航导弹的机翼越长,相同工况下弹体受到的阻力越大。尤其在工况为=20,=8°时,=40°巡航导弹时的阻力比=0°时低了52,如图7(b)所示。
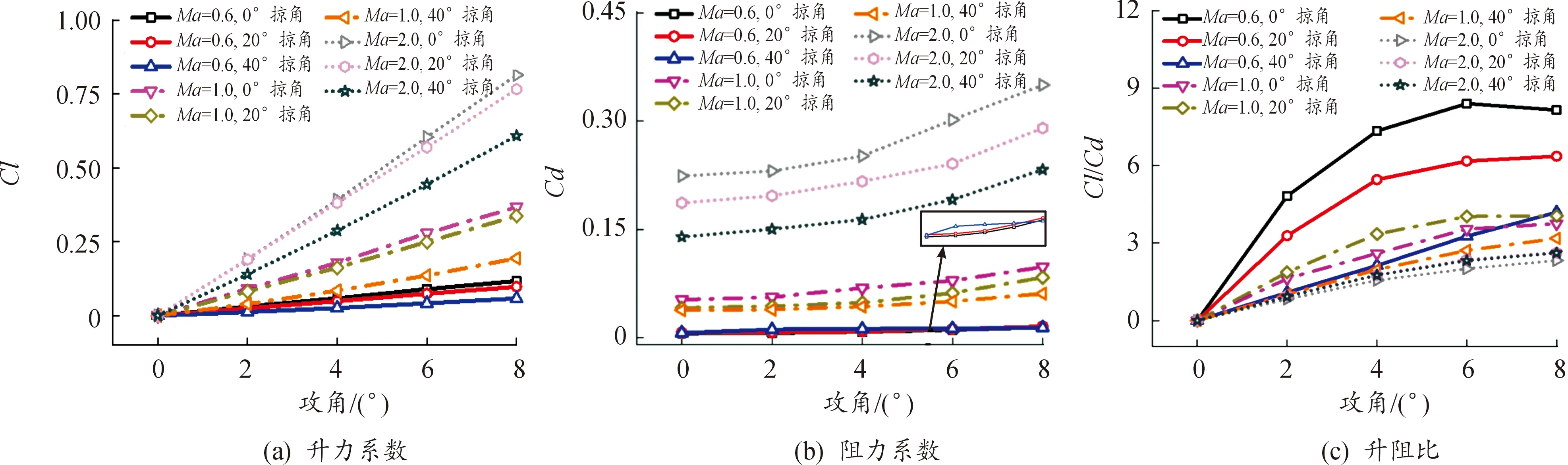
图7 不同工况下的掠翼巡航导弹的气动特性参数曲线
4 变掠翼巡航导弹最佳变后掠角度
遗传算法被广泛地应用于机器学习、自适应控制等领域,较为成熟。采用遗传算法对变掠翼巡航导弹气动力系数进行全局寻优,结合数值计算的气动特性数据,以获得不同马赫数下,最佳升阻比对应的弹翼掠角。
4.1 仿真数据结果预处理

4.2 遗传算法全局寻优最佳变化角度
采用遗传算法对函数=(,,)寻优,通过寻找最佳和的组合,使巡航导弹在各马赫数中,即在亚声速和超声速段的升阻比最大。遗传算法借鉴了生物演变进化的理念,让气动力数据从初始随机混沌的状态进化演变成合理解。首先,通过选用三次多项式插值增加气动力的数据样本容量,根据插值结果建立变掠翼巡航导弹的升阻比响应面;其次,设置寻优过程中的约束条件为最大变掠翼巡航导弹气动力的最大升阻比,构建适应度函数。最后,设置种群大小为50,最大迭代次数为300,交叉概率为0.8,变异概率为0.2。计算结果如表4所示。
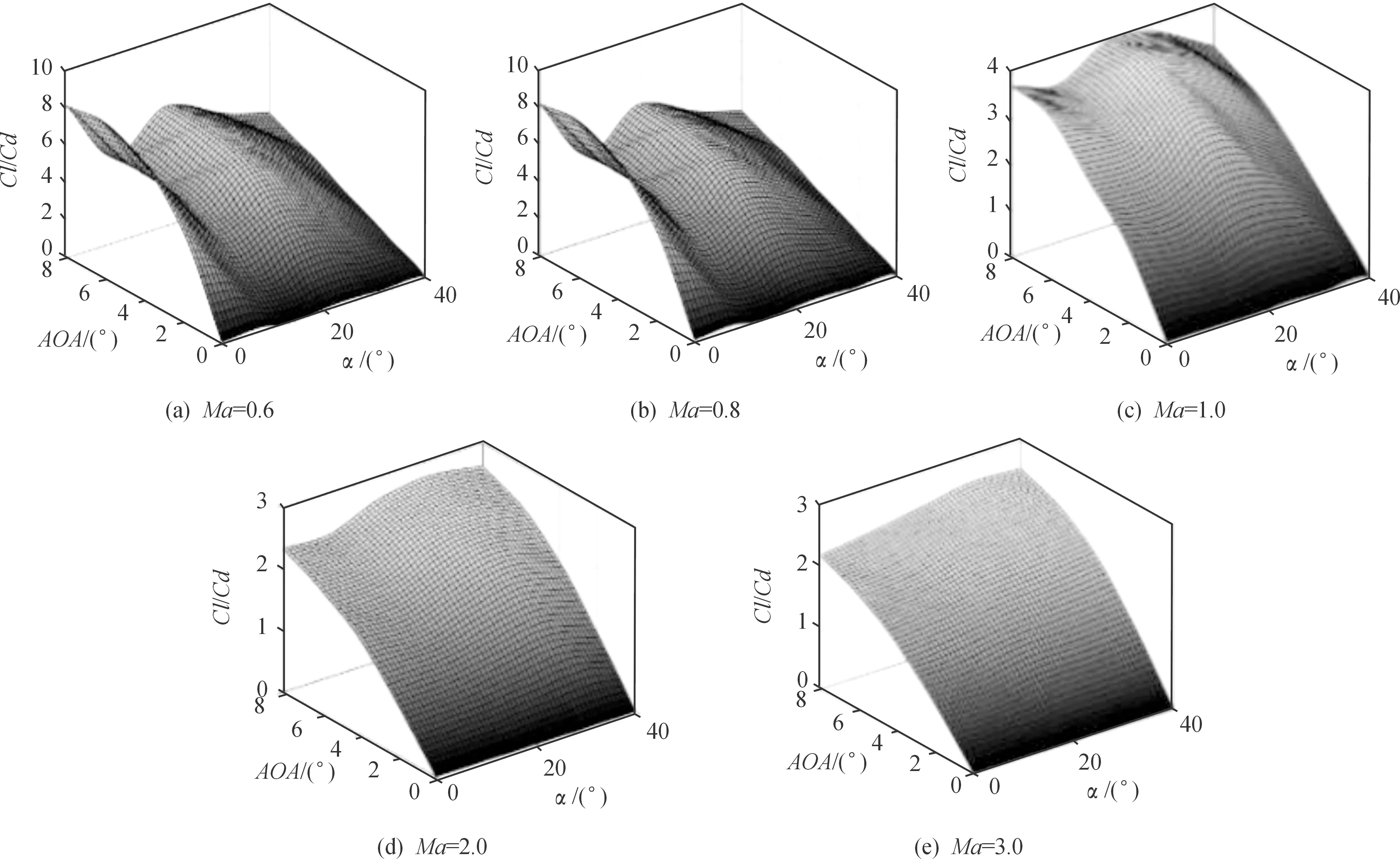
图8 变掠翼巡航导弹升阻比的插值计算结果图
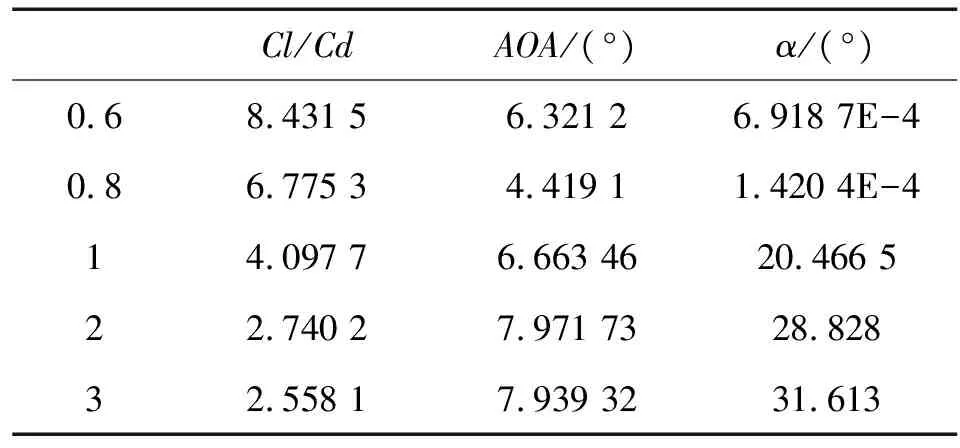
表4 各马赫数的最优掠角及攻角计算结果
4.3 最佳变后掠角度分析及验证
寻优结果表明,在为06与08时,最佳后掠角维持在0°,即充分展开状态下的巡航导弹有良好的气动特性;结合现有的F-14变后掠战斗机后掠角变化情况可知,在亚声速范围的战斗机后掠角较小,几乎完全展开,一方面是机翼偏转影响了飞行器的稳定性,另一方面是机翼完全伸展可以获取较大的升力,与亚声速范围的最优变化规律一致。在=10时,最佳后掠角迅速增大至20467°;在=20时,最佳后掠角逐渐增大至28828°;随着的增大,最佳后掠角变化幅度减小,仅为31.613°。本节遗传算法的约束条件为升阻力系数的最大值,在巡航导弹速度升至临界马赫数时,导弹的阻力大幅增加,故低超声速时,增大弹翼掠角,可以减少受到的弹翼阻力,随着马赫数的增大,弹翼逐渐收缩。F-14变后掠战机飞行速度在达到2.38马赫时,机翼收缩,后掠角高达75°,与巡航导弹在低超声速段的掠角变化规律类似。
5 结论
弹翼掠角变化对巡航导弹的气动特性有较大的影响,改变弹翼掠角可以有效帮助巡航导弹在亚声速和低超声速均获得良好的气动特性。采用遗传算法可以合理计算出巡航导弹在各速域下的最优掠角规律,更为精准的发挥变掠翼巡航导弹在亚声速及低超声速飞行的优势。
为追求最优升阻比,在亚声速阶段,弹翼完全展开,升力系数比弹翼完全收缩时高76%;低超声速段,可结合工况逐渐提高掠角,弹翼完全收缩的阻力系数比弹翼完全展开时低53%。考虑巡航导弹整体的升阻比系数,在低超声速段,并非掠角越大越好,掠角约为30°可获得最优升阻比。
