基于实测载荷谱的某全域车悬架下控制臂疲劳寿命研究
2022-08-10邹喜红苟林林刘俚彤袁冬梅
邹喜红,苟林林,傅 雷,刘俚彤,袁冬梅,凌 龙
(1.重庆理工大学 汽车零部件先进制造技术教育部重点实验室, 重庆 400054;2.重庆嘉陵全域机动车辆有限公司, 重庆 404100)
1 引言
全域车悬架下控制臂作为悬架机构的主要零部件,实现全域车车身稳定、导向及传递各种载荷至车体,下控制臂对全域车正常可靠运行、操作稳定性及平顺性具有重要作用。全域车行驶时,悬架下控制臂受到不同方向、不同大小的力及力矩,在长时间各种载荷的作用下,悬架下控制臂易发生疲劳失效,进而导致车辆发生故障。近年来,学者们针对控制臂疲劳失效进行了深入研究,如Zhu等采用惯性释放法和多体动力学理论提取控制臂的载荷时间历程,对乘用车悬架控制臂进行了疲劳寿命仿真分析。Hafida Kahoul等对控制臂建立边界约束,并在其衬套部位施加恒定振幅的垂直力,采用应变寿命分析方法完成了控制臂疲劳寿命预测。
Ren基于经验法对控制臂进行应力分析并获得了应力结果文件,采用应力-应变法计算了在典型工况下控制臂的疲劳寿命。Sharma运用虚拟迭代法获得控制臂危险位置载荷时间历程,使用临界平面法计算了控制臂危险点的损伤值。刘永臣等通过试验获得了控制臂的应变载荷,运用雨流计数法,编制了控制臂载荷谱,采用局部应力应变法,完成了控制臂的疲劳损伤分析与寿命评估,郑松林等以轿车下摆臂为对象,综合考虑了控制臂各目标测点载荷谱的特征及结构的低载强化特性,提出了一种具有强化效果载荷的程序载荷谱编制方案,对汽车零部件耐久性失效试验和模式的精确推断具有重要意义。王红民等对控制臂在拉、压工况下,进行了拉溃力和压溃力分析,并提取危险部位的应力应变信息作为疲劳损伤参量,采用临界平面法对控制臂疲劳寿命预测。
全域车相比于乘用车行驶路况通更加恶劣,悬架下控制臂所承载力和力矩更大、所受冲击载荷更加剧烈,经过长周期的使用后,容易导致全域车悬架下控制臂疲劳失效。采用逆向工程技术和有限元技术建立某全域车悬架下控制臂有限元模型,进行自由模态分析,通过搭建悬架下控制臂模态试验系统对下控制臂有限元模型进行了模态试验验证,验证了有限元模型的精确性。以某全域车在某试验场越野路面上测试获得的力信号载荷谱为输入,以全域车实际运行工况建立边界约束,对某全域车悬架下控制臂动力学仿真分析。在此基础上,结合动力学仿真分析结果中的应力应变信号,局部应力应变法及兰德格拉夫损伤准则对某全域车悬架下控制臂疲劳寿命进行了分析。
2 有限元模型建立
采用逆向工程技术获得悬架机构的三维模型,三维模型如图1所示。综合考虑单元类型的精确度及网格划分的难易度,采用高阶四面体单元对悬架下控制臂模型进行网格离散,并对容易造成应力集中的部位加密适量的网格,通过检查网格质量参数如翘曲比、雅可比及坍塌比等,确保网格质量。某全域车悬架下控制臂结构共离散为 1 365 610 个高阶四面体单元,268 956 个节点。
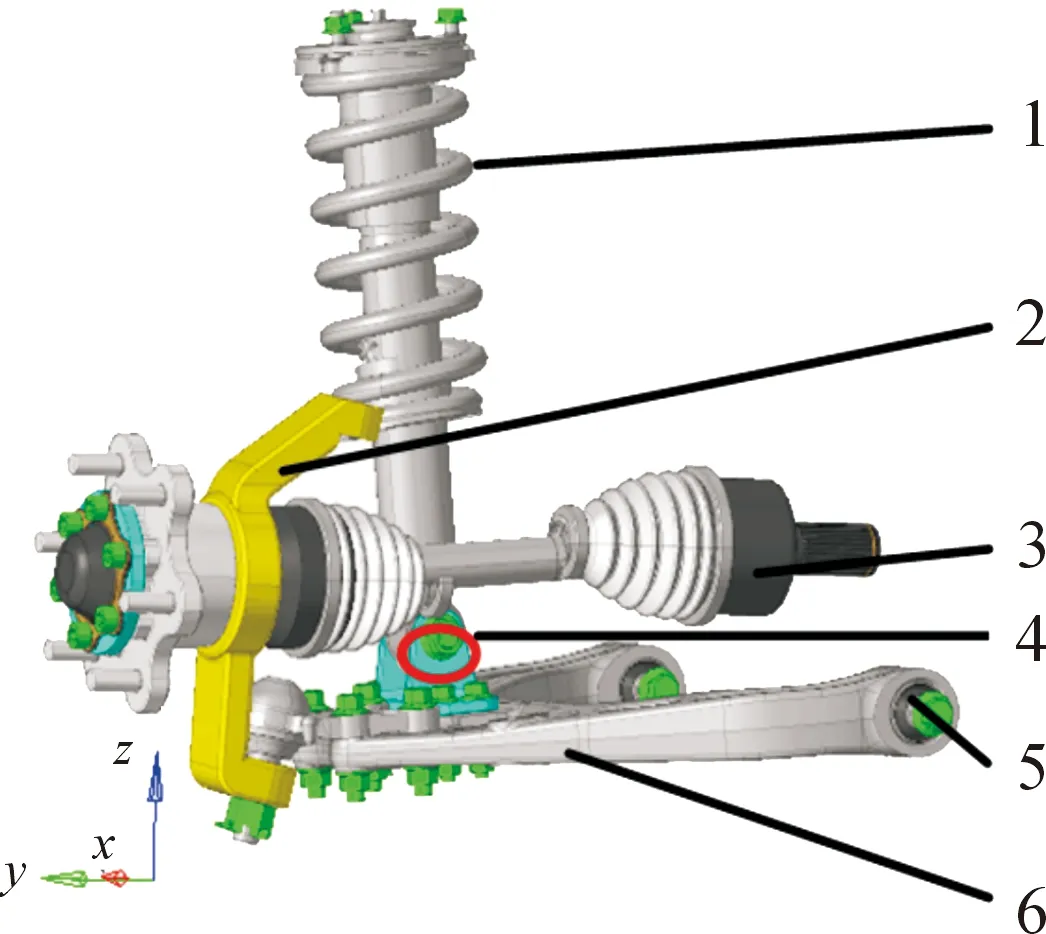
1.螺旋弹簧;2.转向节;3.半轴;4.减震器与下控制臂 连接支架5.衬套孔;6.下控制臂
悬架下控制臂材料为铝合金6082-T6,其材料力学性能参数如表1所示,悬架下控制臂材料为塑性材料,其材料应力应变曲线如图2。在螺栓孔部位建立耦合点和局部坐标系,用于施加载荷及建立边界约束,悬架下控制臂有限元模型如图3所示。
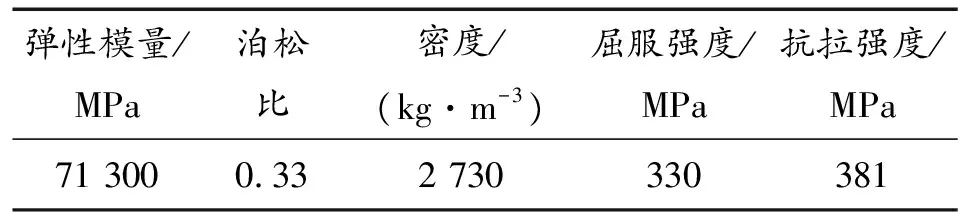
表1 铝合金6082-T6材料参数
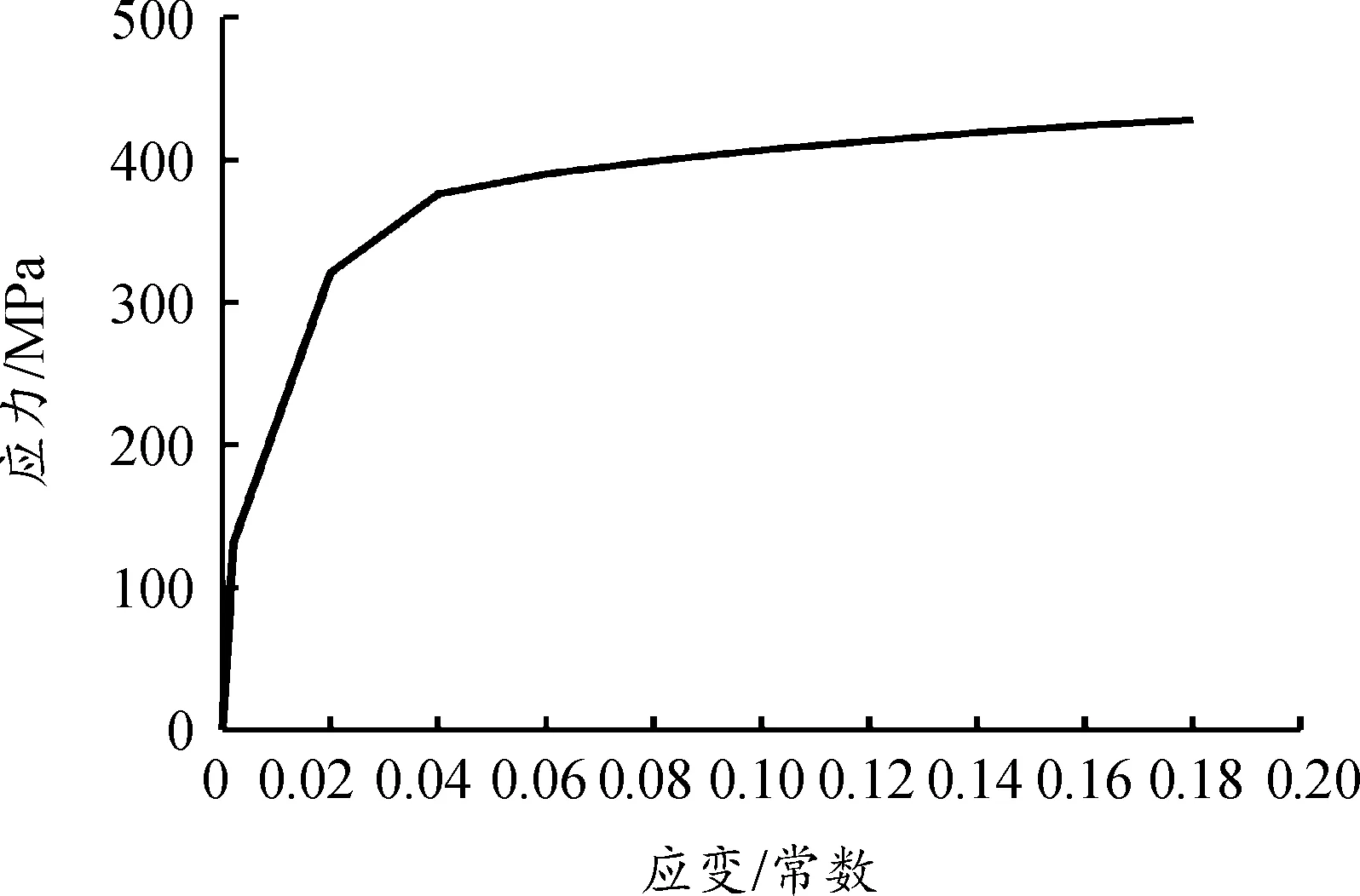
图2 应力应变曲线
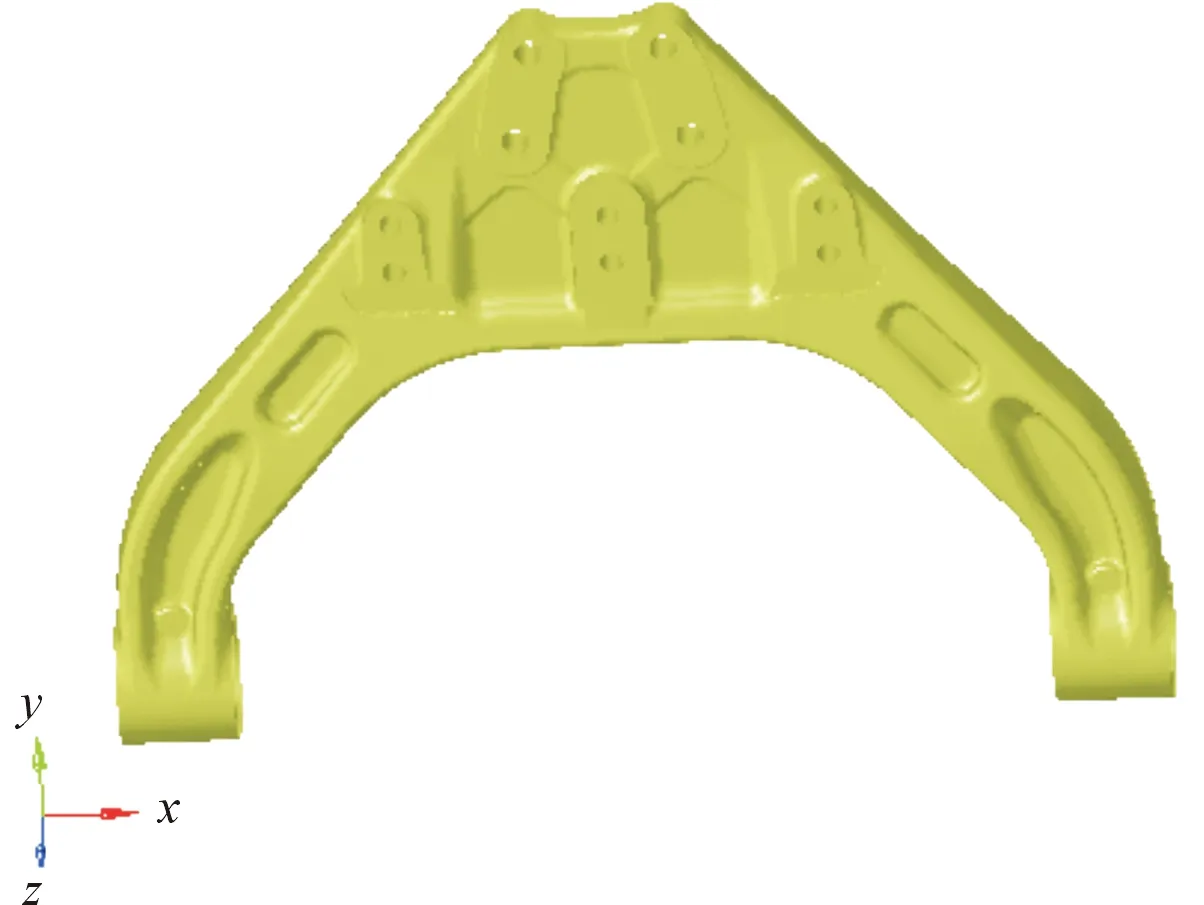
图3 下控制臂有限元模型示意图
3 有限元模态分析及试验
3.1 计算模态分析
结合Lanczos法与有限元法对下控制臂进行无约束边界的计算模态分析,前4阶计算模态的固有频率及振型如图4所示。
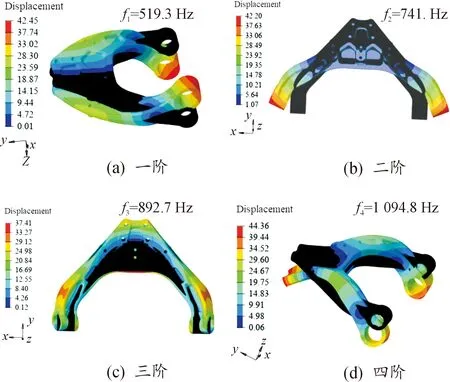
图4 计算模态的固有频率及振型云图
3.2 模态试验
..试验系统搭建
悬架下控制臂模态试验系统由激振系统、信号测量系统、数据采集系统、数据分析系统及被测试构件组成,试验模态系统流程如图5所示。将悬架下控制臂采用橡胶软绳悬挂方式模拟无约束自由状态,采用移动力锤,固定传感器的方式进行悬架下控制臂模态试验研究,有关状态如图6所示。经过数据采集系统及数据分析系统获得悬架下控制臂试验模态的振型及固有频率。
..激励点与测点选取
参考悬架下控制臂计算模态结果的固有频率及振幅较大位置,共选取44个激励点,3个响应点即在节点2、节点10及节点35号位置布置加速度传感器作为响应点,三向加速度传感器采用非对称方式进行布置,消除加速度传感器本身质量造成的试验误差。参考下控制臂实物及有限元模型,运用LMS-Test.Lab 16A软件建立悬架下控制臂模态试验模型,试验模型如图7所示。
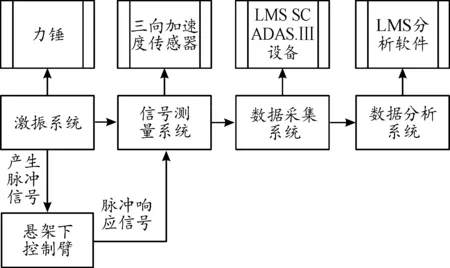
图5 试验模态系统流程框图
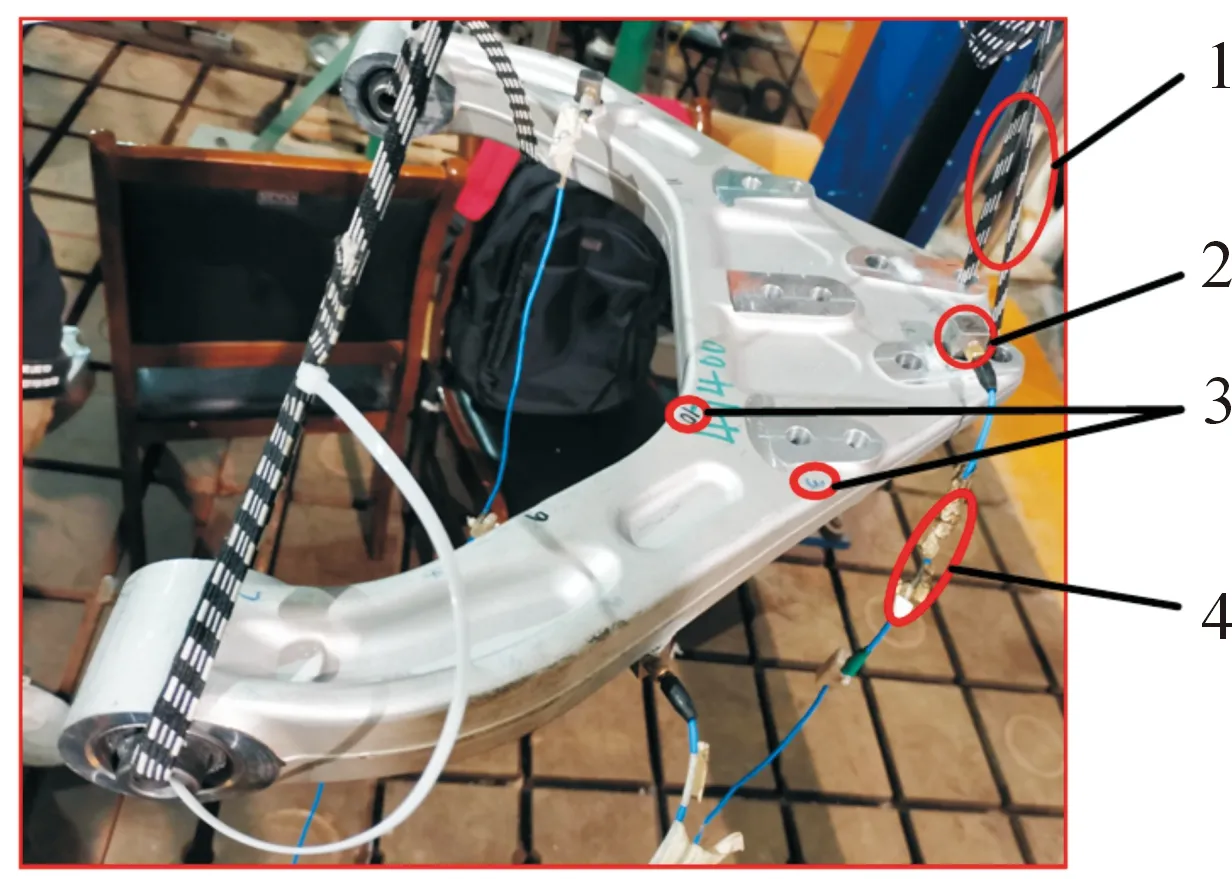
1.橡胶软绳;2.加速度传感器;3.激励点;4.转接线
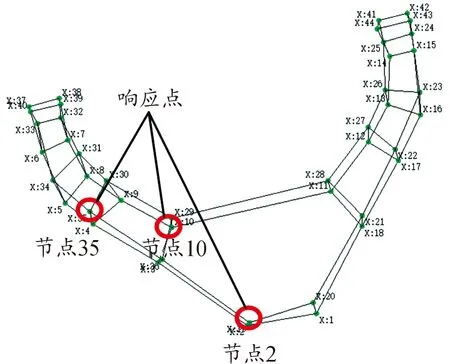
图7 下控制臂模态试验模型示意图
..试验过程与结果
进行悬架下控制臂模态试验时,依据采样定理及参考计算模态结果,设定采样频率为5 000 Hz。为提高试验精确性,各激励点重复敲击5次,并以每次敲击产生的激励信号与响应信号之间的相干性判定试验信号的精确性,如式(1)所示。悬架下控制臂模态试验时,由于下控制臂构件中存在阻尼及试验时外界噪声的影响可能导致激励信号与输出信号之间的相干系数不完全等于1,使得相干系数值偏低。为确保模态试验结果可靠性,在进行试验时,须保证各测点大部分相干系数值在0.9以上,某些测点的输入信号与输出信号相干函数值如图8所示。运用最小二乘域法则获得悬架下控制臂试验模态的固有频率、阻尼比和振型,试验模态结果如表2所示。
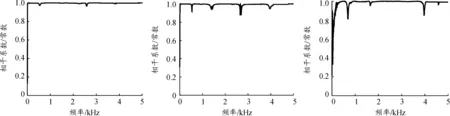
图8 相干函数曲线
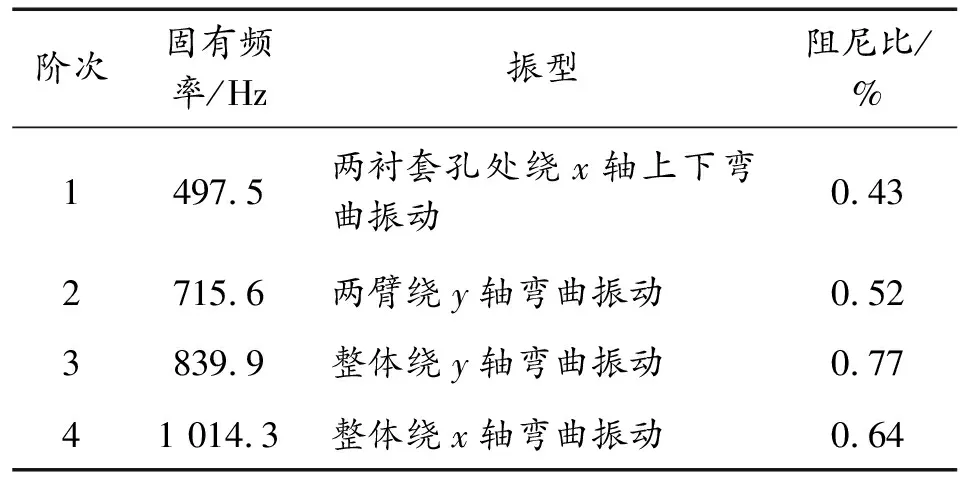
表2 固有频率及振型参数的试验模态结果
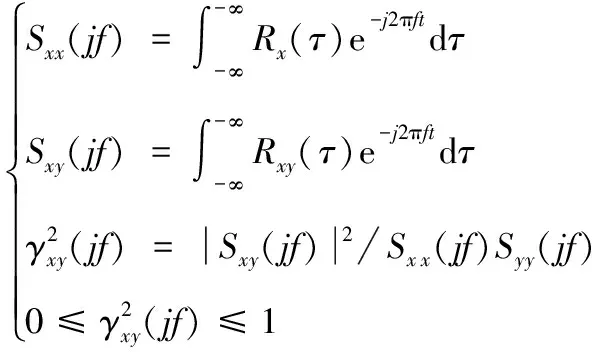
(1)
3.3 模态验证
分析下控制臂试验模态与计算模态振型及固有频率,分析结果如表3所示,悬架下控制臂各阶模态振型一致,计算模态与试验模态固有频率结果存在相对误差,产生这一误差的原因有:1)有限元模型的简化;2)在进行计算模态分析时未考虑悬架下控制臂材料阻尼比,导致固有频率存在相对误差值。最大相对误差值在8%以内及悬架下控制臂模态振型一致,验证了下控制臂有限元模型的精确性。
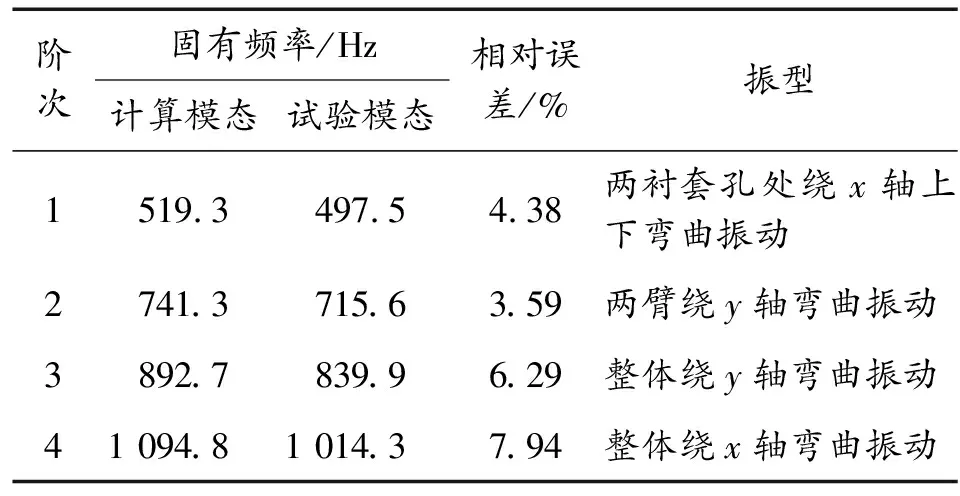
表3 模态分析结果
.
以某全域车悬架下控制臂为试验研究对象,进行某全域车道路载荷谱采集试验,试验现场如图9所示。

图9 悬架传感器布置现场图
全域车悬架下控制臂所承载力主要由减震器产生,对此,在全域车悬架机构上布置传感器,获得了全域车在某试验场越野路面上行驶时减震器与下控制臂连接处的力信号载荷谱,力载荷谱信号如图10所示。
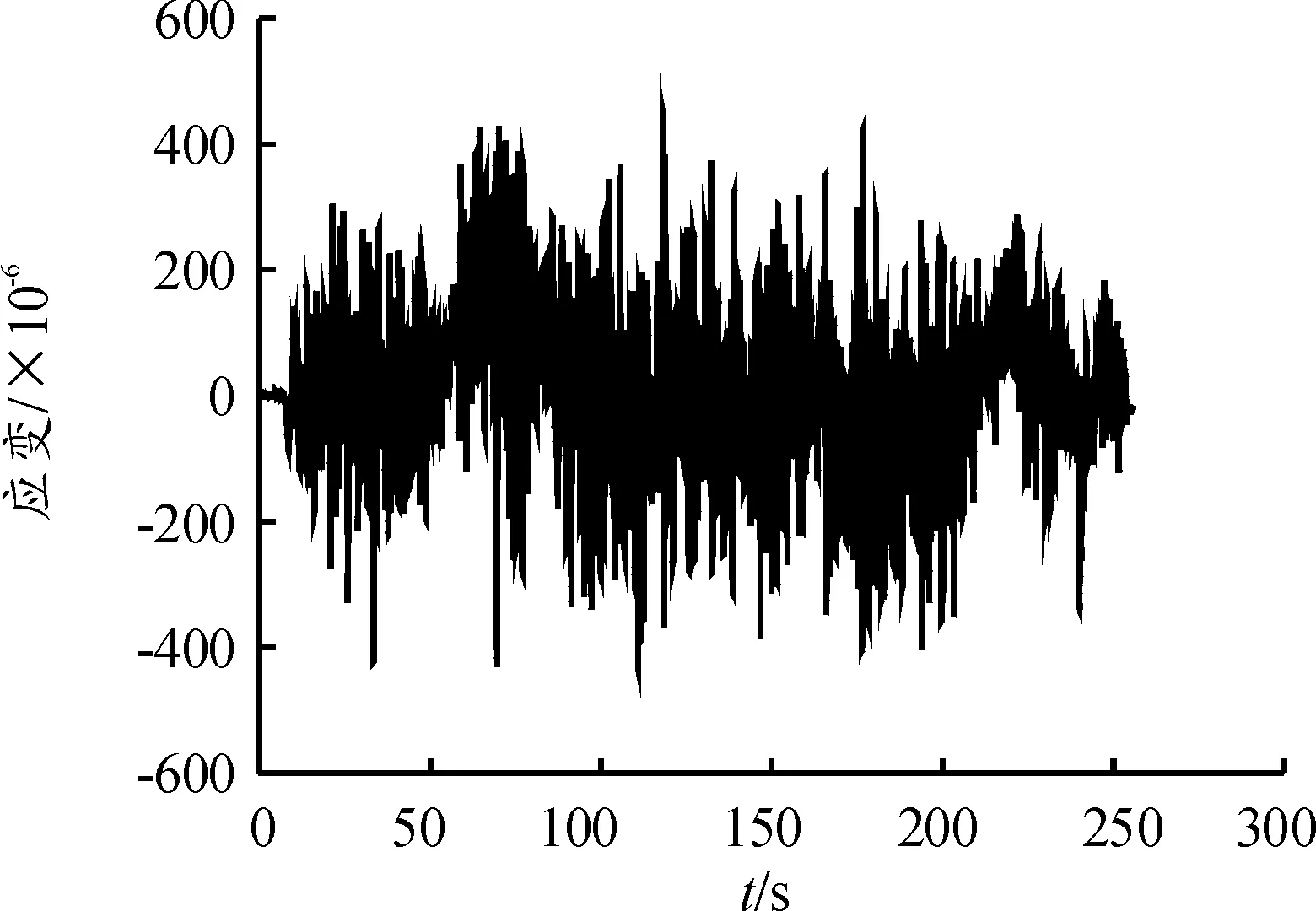
图10 力信号载荷谱曲线
4.2 信号处理及分析
对所采集的力信号载荷谱数据采用幅值门限法、低通滤波及重采样的方式进行载荷处理。载荷分布规律是疲劳设计的前提,悬架下控制臂载荷即所受力信号是随机载荷,运用雨流计数法对悬架下控制臂所受的力进行统计分析,雨流计数法反映了材料的应力应变行为,能够较为全面地反映随机载荷的全过程。
采用雨流计数矩阵建立悬架下控制臂载荷均值与幅值的二维联合密度函数,依据工程经验,运用雨流计数法获得的汽车道路载荷谱,幅值一般服从威布尔分布,均值服从正态分布,控制臂载荷分析如图11所示。悬架控制臂载荷服从这一工程经验,说明下控制臂实测载荷谱数据可靠,可用于悬架下控制臂的疲劳寿命研究。
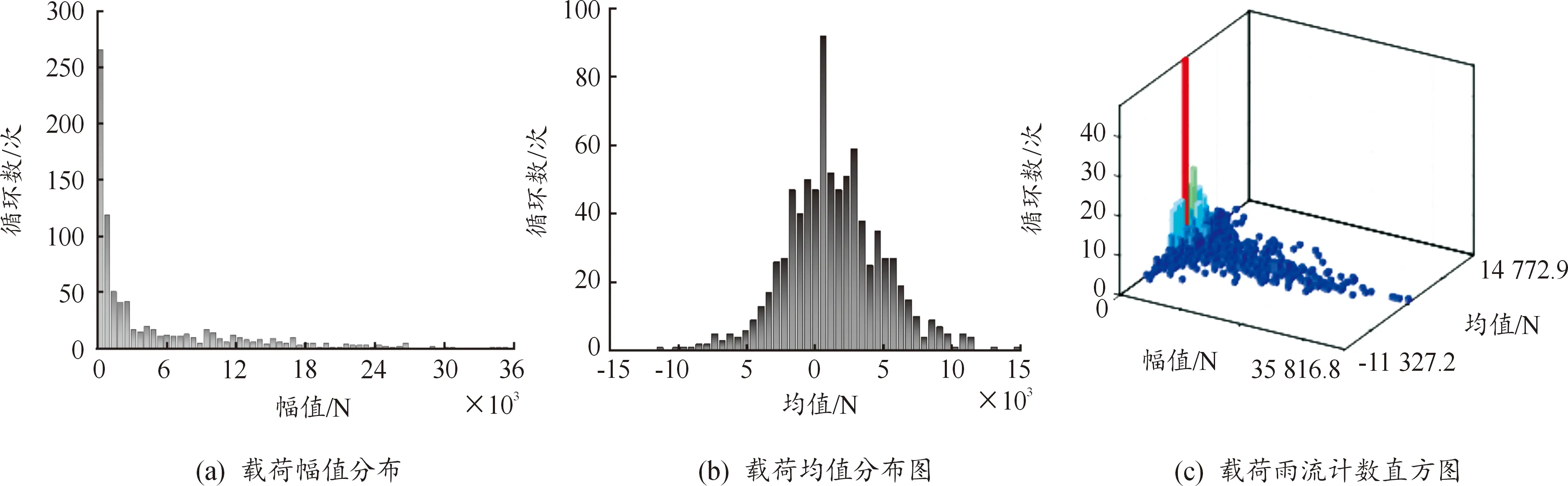
图11 悬架控制臂载荷分布图和载荷雨流计数直方图
4.3 动力学仿真分析
根据试验车辆在实际行驶工况,对悬架下控制臂有限元模型建立边界约束,与减震器连接部位建立耦合点并以实测力信号载荷谱作为输入,进行动力学仿真分析。采用Mises准则进行应力、应变组合,如式(2)所示,动力学仿真分析结果如图12所示。


(2)
式中:为某点的等效应力;、、分别为、、轴方向的应力分量;、、分别为作用在悬架下控制臂的切应力分量。
综合实际载荷谱和全域车实际行驶边界条件,悬架下控制臂动力学仿真分析结果表明应力和应变最大值发生在轴套孔和摆臂连接处,其Mises应力最大值和应变值分别为321.68 MPa、0.043 5。
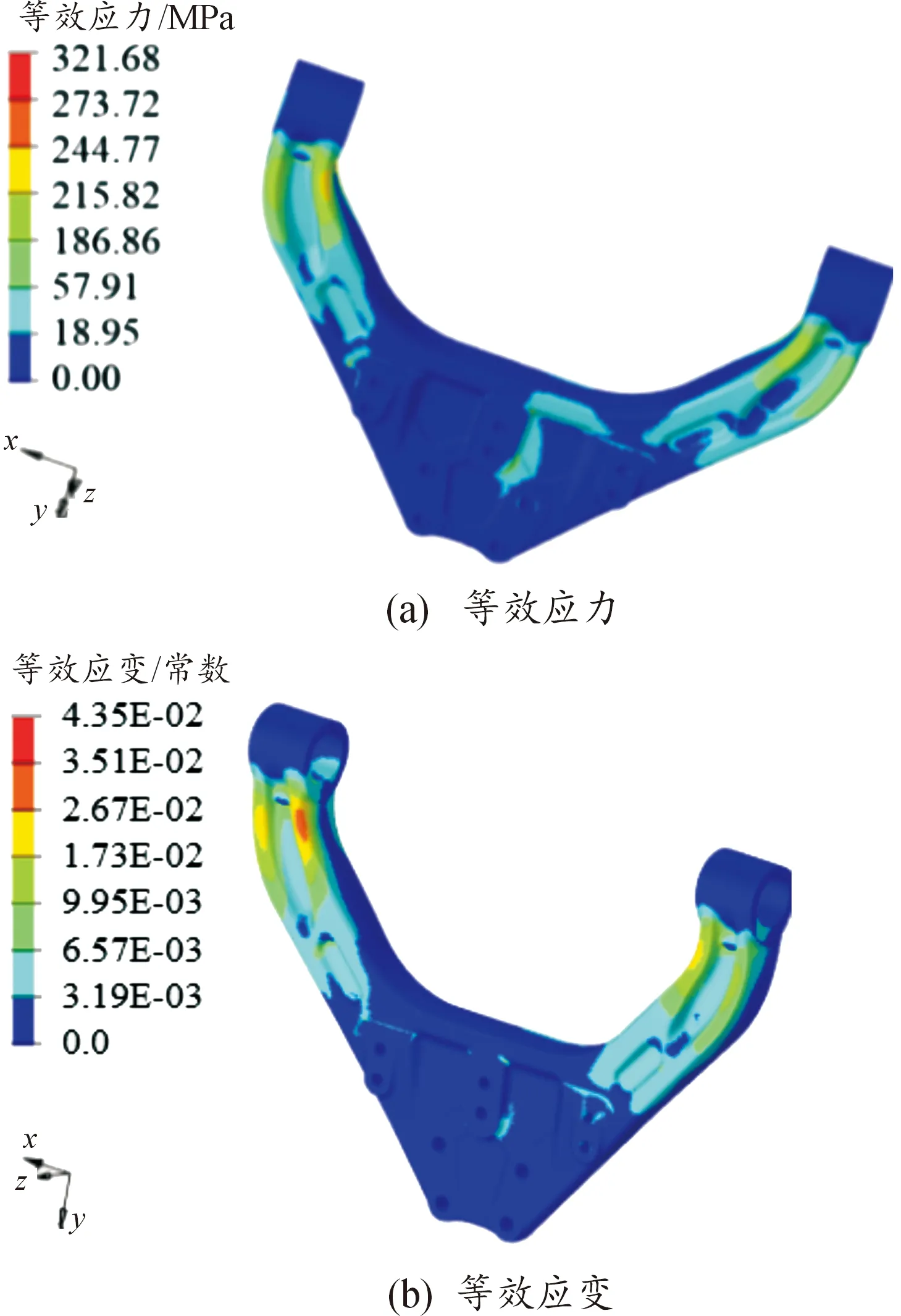
图12 动力学仿真云图
5 悬架下控制臂疲劳寿命研究
5.1 寿命预测方法
..局部应力应变法及修正
下控制臂受到较大载荷作用时,材料会发生屈服,综合悬架下控制臂动力学分析结果及下控制臂材料应力应变曲线可得,悬架下控制臂应力最大位置已进入塑性变形阶段,下控制臂应力应变关系不再是线性关系。此时,悬架下控制臂疲劳失效主要受塑性应变的影响。对此,本文采用局部应力应变法进行悬架下控制臂疲劳寿命估算,局部应力应变法如式(3)所示。
采用局部应力应变法可以考虑到悬架下控制臂载荷顺序的影响及此方法适用于结构承受随机载荷的疲劳寿命计算。本文根据悬架下控制臂载荷历程及材料的局部应力应变响应函数,对其进行下控制臂疲劳寿命估算。

(3)

当悬架下控制臂材料处于弹性范围内时,平均应力对其疲劳寿命影响较大,当材料出现布局塑性变形时,由于应力松弛的作用,平均应力对悬架下控制臂疲劳寿命影响较小,对此采用Manson-Coffin-Baquin的Morrow平均应力修正公式对局部应力应变法中的弹性应变进行修正,修正后的局部应力应变法准则如式(4)所示,

(4)
式中,为平均应力。
兰德格拉夫损伤准则
兰德格拉夫损伤准则认为,损伤由塑性应变Δ与弹性应变Δ比值来衡量,每个局部应变为Δ=Δ+Δ的应变循环造成的损伤,损伤计算准则如式(5)所示。
(5)
5.2 下控制臂疲劳寿命分析
根据材料抗拉强度及弹性模量等参数,估算获得下控制臂材料相关疲劳参数。综合下控制臂动力学分析结果,通过提取动力学分析结果中的应力应变信号作为疲劳寿命估算的输入信号,并结合局部应力应变法和兰德格拉夫损伤准则对悬架下控制臂进行疲劳寿命分析,计算流程如图13所示。
悬架下控制臂疲劳寿命估算如图14所示,悬架下控制臂损伤最大位置在衬套孔与长臂连接处,造成较大损伤主要原因为几何形状不规则容易造成应力、应变集中,进而导致损伤加剧。悬架下控制臂疲劳损伤最大处即最小疲劳循环寿命次数为1386×10次。
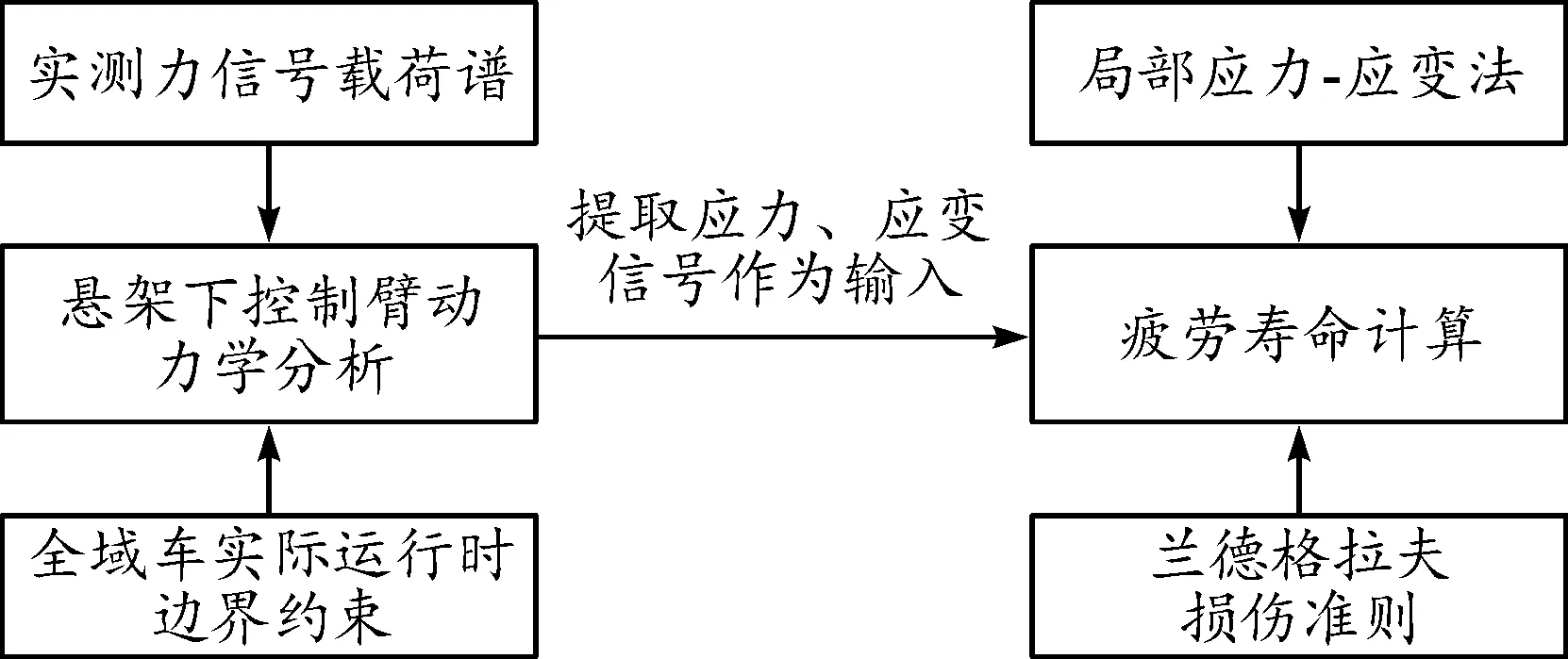
图13 疲劳寿命计算流程框图
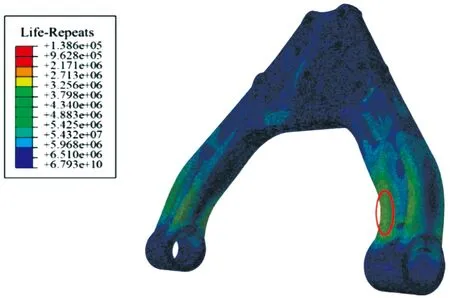
图14 悬架下控制臂疲劳寿命估算云图
依据Miner损伤理论估算可得到悬架下控制臂的总体寿命,总体寿命包括裂纹萌生与失效时的疲劳寿命循环次数。在进行全域车载荷谱采集试验时,试验车辆在越野路面上所行驶距离为2.57 km,根据试验车辆在路面行驶距离及疲劳寿命循环次数,估算得到悬架下控制臂在越野路面上总寿命为3.56×10km,悬架下控制臂疲劳寿命符合设计使用要求。
6 结论
计算模态与试验模态振型一致,固有频率误差在8%以内,验证了有限元模型的精确性,悬架下控制臂在越野路面使用寿命即最小疲劳循环寿命为3.56×10km。
综合考虑了悬架下控制臂的冲击载荷、实际载荷对悬架下控制臂的疲劳寿命的影响,建立了一种基于悬架下控制臂实测力信号载荷谱的疲劳寿命分析方法,可为以后全域车悬架下控制臂设计及疲劳寿命估算提供参考。
