舰炮末敏弹反水面无人艇群射击效能仿真分析
2022-08-10崔东华孙世岩
曹 鑫,崔东华,冯 炜,周 源,孙世岩
(1.中国人民解放军91054部队, 北京 102442; 2.海军工程大学 兵器工程学院, 武汉 430033)
1 引言
无人水面艇是具有鲜明海上特色的无人作战装备,无人艇自身优越的性能与“蜂群”战术的结合,使其在现代海战中对载人舰艇编队的威胁与日俱增,如何有效解决无人艇群作战对水面舰艇的威胁已成为各国海军发展进程中亟需解决的问题。针对此问题,本文提出一种基于舰炮末敏弹的海上反无人艇群方案,充分发挥末敏弹药“点打击”与“面覆盖”的作用特点,使用舰炮发射末敏弹,将其投送至无人艇编队目标上方,末敏弹在其扫描范围内自动搜索、捕获、识别和命中目标,达到短时间内高效击溃无人艇群的目的。
为了验证舰炮末敏弹防御水面无人艇群的可行性,基于舰炮武器系统作用流程及末敏弹性能指标,研究分析舰艇发射末敏弹打击水面无人艇群各阶段特点及原理,构建舰炮末敏弹射击效能仿真评估系统数学模型,使用Unity3D软件编制可视化射击效能分析软件,通过仿真计算评估舰炮末敏弹药打击无人艇群目标的射击效能,同时指导舰炮末敏弹的作战使用。
2 舰炮末敏弹作用过程及原理
水面无人艇集群目标对敌方进行进攻时,以一定的战斗队形、速度攻击敌方舰艇,进入无人艇上搭载的相关武器的火力攻击范围时进行火力打击;舰艇对无人艇群目标进行打击前,需要对目标进行侦察,得到目标位置、速度等信息,根据相关准则划分打击区域,计算各打击区域目标提前点,在考虑舰炮武器系统战技指标后制定详尽作战方案,并按照设计的作战方案分配舰炮具体作战任务。根据作战任务,末敏弹结合环境因素计算射向、射角和开舱时间等射击诸元并进行装订;末敏弹按预定弹道飞行至预定区域上空的预定高度后,由时间引信控制点燃抛射药,抛射机构以后抛的方式沿轴向抛出若干枚子弹;各末敏子弹通过控制开伞时序实现分离至设定距离,抛掉减速伞,释放旋转伞,伞-弹系统迅速稳定进入稳态扫描状态;稳态扫描时末敏子弹以稳定的落速、转速和扫描角运动,弹上敏感器随末敏子弹运动并自主地对目标进行搜索、探测和识别,敏感器一旦成功捕获、识别目标,弹载计算机适时发出起爆指令起爆EFP战斗部形成侵彻体,从顶部攻击目标。
3 仿真模型构建
3.1 坐标系定义
..基准坐标系
以初始时刻舰炮位置中心为原点,舰艇前进方向为轴方向,轴垂直于轴向上,轴在水平面内按右手定则确定。
集群目标坐标系′′′′
将基准坐标系原点平移至无人艇集群目标中心,得到坐标系′-,′-绕′轴旋转角度得到集群目标坐标系′-′′′,其中′′轴与集群目标运动方向相同。
炮口坐标系
将基准坐标系绕轴旋转角度得到炮口坐标系-,使轴与末敏弹射向一致。此坐标系用于求解末敏弹弹道模型。
扫描坐标系
将基准坐标系原点移至每枚末敏子弹扫描运动中心点在基准坐标系水平面内的投影点(,),坐标轴方向不变,得到每枚末敏子弹的扫描坐标系。该坐标系用于表示末敏子弹的扫描运动规律。
3.2 无人艇目标运动模型
目标典型阵列
1) 集群初段节能远洋机动阵列。无人艇集群自母船或岸基岛基作战基地释放,编队前往预定搜索作战海域。初段行进过程中,为减小能源损耗,增强集群续航能力,集群中个体跟随在领导艇后方行进机动,如图1所示。
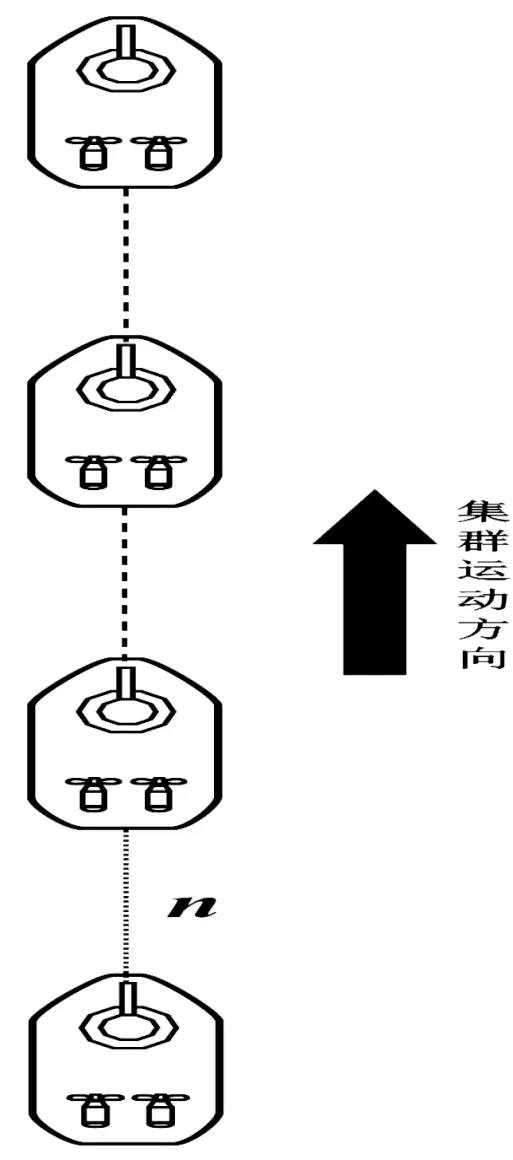
图1 集群初段节能远洋机动阵列示意图
2) 集群中段协同搜索机动阵列。集群进入预定搜索/待命海域内后,由初段远洋机动阵列变为中段协同搜索阵列,各跟随艇在领到艇的统一引导下,分别利用自身艇载的不同搜索探测设备对我方目标进行协同搜索。为保证搜索到我方重要目标后集群能够快速进行阵型变换并转为末段集群攻击阵列,协同搜索阶段集群典型阵列形式如图2所示。
3) 集群末段冲锋攻击阵列。集群发现我方目标后,将由中段协同搜索阵列快速转换为末段冲锋攻击阵列,在领导艇引导下,集群朝向我方重要目标进行末段攻击,如图3所示。
..目标运动数学模型
初始时刻各无人艇目标中心在基准坐标系内坐标为(,,),=1,2,3,…为无人艇目标编号,目标运动方向,以基准坐标系方向为基准,顺时针旋转为正,目标运动速度大小,各目标中心时刻在大地坐标系内坐标为:
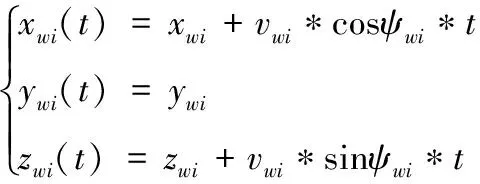
(1)
由目标任意时刻中心位置坐标及目标运动方向,可以得到任意时刻各目标在基准坐标系内位置。
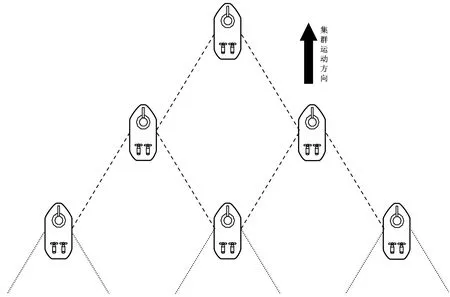
图2 集群中段协同搜索阵列示意图
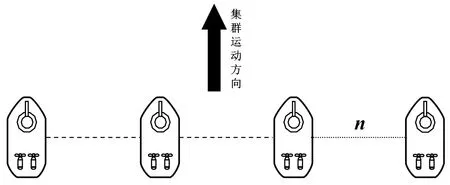
图3 集群末段冲锋攻击阵列示意图
3.3 打击方案确定模型
..末敏弹威力范围等效计算
末敏子弹最大扫描区域近似于半径为的圆,为方便对集群目标区域细分,将一前一后分布且存在一定重合区域的2个大小相同的圆等效为1个末敏弹的扫描区域,将等效后的末敏弹扫描区域作为划分集群目标区域的最小单元。等效计算后,1枚末敏的打击区域近似记为×大小的矩形区域,具体等效替代过程如图4所示。
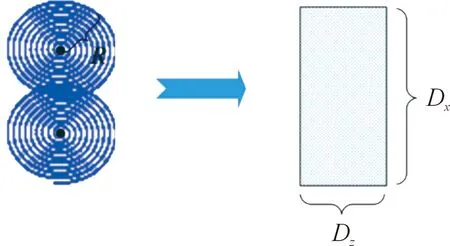
图4 扫描区域等效替代过程示意图
(2)
式(2)中:、为等效系数;为末敏子弹分离距离。
打击区域划分及排序
集群目标区域一般远大于单发末敏子弹的作用范围,因此需要以单发末敏弹威力范围为最小单位,将集群目标区域划分为各打击区域,以对无人艇集群末段冲锋攻击阵列区域划分为例进行说明。
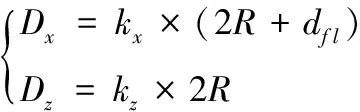
如图5所示,对末段冲锋攻击阵列的无人艇集群目标进行划分打击区域时,先确定其横向艇群长度为:
=*+(-1)interval (=1,2,3,…)
(3)
根据艇群长度可确定其打击区域数量为:
=(2*+)
(4)
式(4)中:为打击区域总数(向上取整);为2枚子弹分离方向中间误差;为末敏弹纵向威力打击范围。
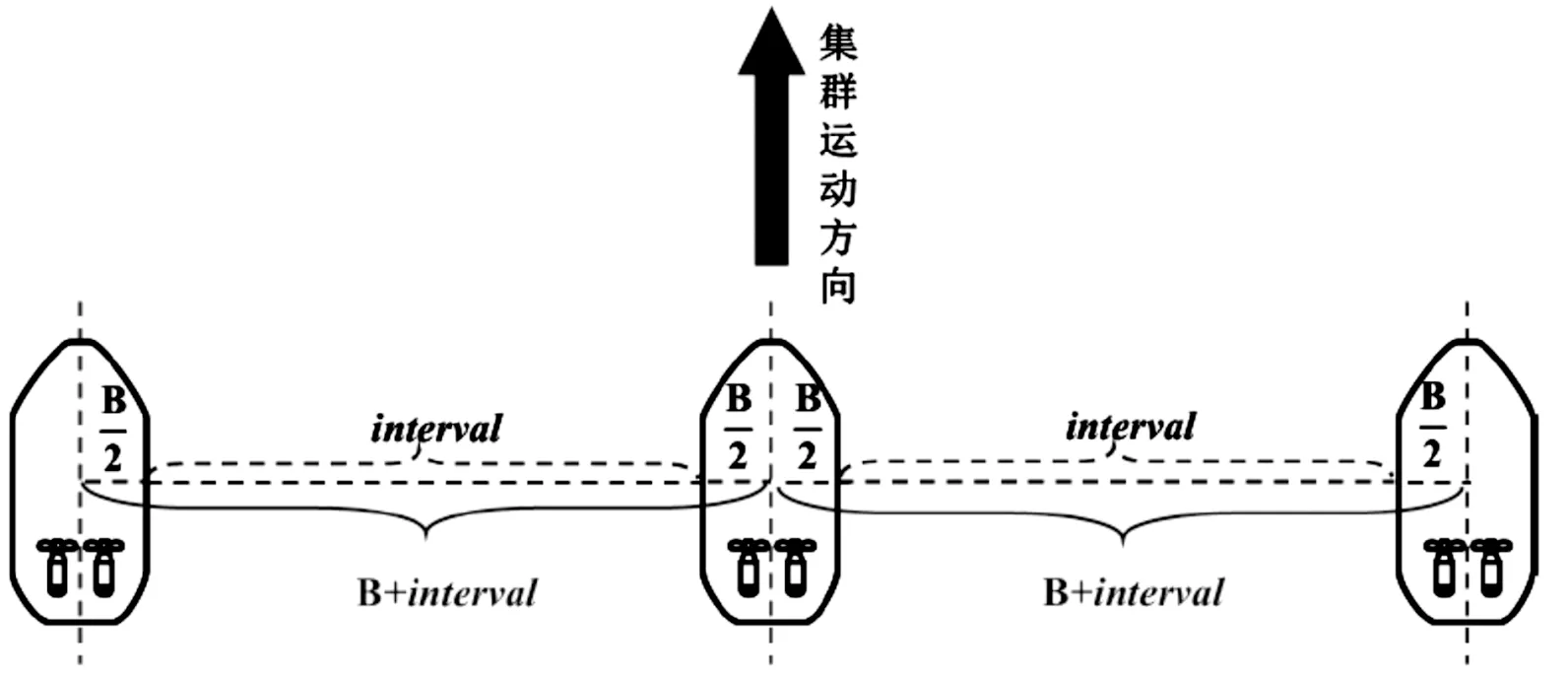
图5 末段冲锋阵列间距示意图
各打击区域按照距离优先原则,认为离舰艇距离越近的打击区域其威胁越大,因此对各打击区域的打击顺序按照各打击区域中心与我舰的绝对距离由小到大排序,当各区域距末敏弹载体绝对距离为1<2<3<…<时,其打击顺序为1→2→3→…→。
制定打击方案
末敏子弹自分离点开始存在一前一后2条弹道,在求解各打击区域瞄准点时,若用其中1条弹道求解则无法保证另1枚子弹落入打击区域,因此子弹减速减旋段开始,将2枚子弹的分离中间点轨迹视为2枚末敏子弹虚拟弹道,对母弹飞行弹道、分离中心点虚拟弹道进行拟合,形成1条弹道求解各打击区域瞄准点。
4)教师同行评价。学校设立听课制度,要求学科主任、教研室主任、高年资教师等作为教师同行专家,对专业或学科相同、相近的教师进行实践教学跟踪听课,及时指导并评价。
各打击区域瞄准点解命中是以下方程的联立解,即:
(5)
=(,)
(6)
式(5)~(6)中:、、为各打击区域中心点的坐标;、、为打击区域瞄准点的坐标;=(,)为火炮射表的弹丸飞行时间逼近函数;函数、、是在时间内3个直角坐标改变量函数。具体求解过程如下:
1选取弹丸飞行时间初值为,代入式(5)中,求得:
(7)
2 将式(7)代入式(6)中,求得:

(8)


瞄准点坐标求解过程如图6所示。
图6 打击区域瞄准点求解示意图
对于划分的个打击区域,在考虑舰炮发射准备、射速、转火时间的基础上,按照打击区域排序情况和瞄准点解命中步骤,分别计算各个打击区域的实时瞄准点。瞄准点求取后,根据瞄准点位置求解末敏弹载体与瞄准点之间的距离,通过查找射表可得到射角,射向的简化计算公式为:

(7)
完整的打击方案如表1所示。
表1 打击方案
3.4 稳态扫描系统模型
..扫描轨迹模型
末敏子弹稳态扫描过程如图7所示,末敏子弹在(单位为m)高度处,以落速、旋转角速度和稳态扫描角对地面进行螺旋线式扫描。设扫描初始时刻为′,初始扫描高度为′,初始扫描点在基准坐标系中水平面上的投影坐标为(,),子弹稳态扫描时伞-弹系统重力与阻力相互平衡,其水平投影位置仅受风的影响,则时刻稳态扫描中心坐标及末敏子弹敏感轴与基准坐标系水平面的交点的坐标分别为:
(8)

(9)
式(8)~(9)中:为风速在方向分量;为风速在方向分量;为扫描角初始相位,0°~360°随机选取。

图7 稳态扫描过程示意图
..弹目交会与目标识别模型
敏感轴在时刻开始进入目标识别区,其与目标识别区的交点坐标为(1,1),在时刻敏感轴轨迹目标识别区的交点坐标为(2,2),当扫入点(1,1)与时刻点(2,2)之间的弧长大于判宽时,即认为已经捕获到目标。
目标被敏感器捕获后,进行识别判断。设识别概率为常数,随机抽取(0,1)内的随机数与进行比较。若≤,则认为目标识别成功;若≥,则认为目标识别失败。
命中与毁伤目标模型
记弹丸在″+时刻与目标区域的交点为(,),目标命中区域为,满足(,)∈,则末敏子弹命中目标,否则末敏子弹没有命中目标。
4 作战效能仿真评估
利用上述模型,使用Unity3D平台编写了舰炮末敏弹作战效能评估可视化仿真软件,软件界面如图8所示。
图8 软件仿真过程不同阶段界面示意图
对集群目标,以耗弹量作为射击效能评价指标,毁伤目标相对数是指毁伤目标数占集群目标总数的百分比,耗弹量是指其毁伤目标数达到预定要求数值时所消耗的母弹数量的平均数,软件的具体计算流程如图9所示。
以某型末敏弹为例,计算对无人艇集群的命中情况。仿真参数设置如下:无人艇集群(=7)成末段冲锋阵列,各目标位置如图5所示,相邻目标横向间距分别为100 m、150 m、200 m,行进速度为13 m/s,速度方向为基准坐标系负方向,无人艇几何尺寸为7 m×1.9 m、9 m×2.1 m、11 m×3.5 m,1枚母弹携带2枚子弹,敏感器最大作用距离120 m,子弹扫描半径60 m,子弹前后分离距离100 m,稳态扫描阶段子弹落速为12 m/s,转速4 r/s,稳态扫描角30°,动态补偿角5°,目标识别率0.9。设置命中目标相对数目标为100%,对各打击区域实行轮次攻击,假设目标命中即毁伤,仿真计算结果如表2所示。
图9 计算流程框图
表2 仿真计算结果
5 结论
1) 仿真结果表明,无人艇目标几何尺寸增大时,末敏弹命中概率有所增加,命中相同目标数量的末敏弹耗弹量减少,但减少幅度不明显。
2) 在相同目标几何尺寸及目标数量条件下,随着目标间距的增加,打击区域数量增加,部分末敏弹瞄准区域不存在目标,导致命中相同目标的末敏弹耗弹量增加,且增加幅度较大,与理论分析一致。
3) 通过理论分析及示例计算,所得结果与理论分析一致,验证了舰炮末敏弹反无人艇群射击效能仿真评估系统数学模型的科学性及准确度,能够用于舰炮末敏弹反水面无人艇群作战。
