机会信号导航综述
2022-08-10方胜良范有臣马淑丽
刘 涵,方胜良,范有臣,马淑丽
(航天工程大学, 北京 101416)
1 引言
导航即引导航行,其基本目的是解决运行体“身在何处?取向哪里?”的问题,需要确定运行体的位置、航向以及飞行(待飞)时间。目前全球导航卫星系统(global navigation satellite system,GNSS)凭借其高精度与高稳定性,已成为最常用的导航技术,有着无可替代的优势,具有代表性的系统包括美国的全球定位系统(global positioning system,GPS)、欧洲的伽利略系统(Galileo)、俄罗斯的GLONASS系统和中国的北斗卫星导航系统(BeiDou navigation satellite system,BDS)。但是,由于GNSS信号自身存在局限性,如信号到达地球表面功率低、在传输过程中容易受到干扰和遮挡等,仅依靠GNSS进行导航往往存在一定的风险,因此机会信号导航(navigation via signal of opportunity,NAVSOP)系统作为一种有效的辅助手段备受青睐。
机会信号导航是指将环境中所有潜在的无线电信号视为机会信号(signal of opportunity,SOP),并从中提取位置和时间信息用以导航,常见的机会信号包括Wi-Fi信号、电视信号、广播信号、低轨卫星信号等。NAVSOP所追踪的信号不是以导航为目的发射的,其原理与GNSS信号实现导航的原理也有所不同。NAVSOP大多是小范围进行的,首先在特定坐标系下确定目标的相对位置,再进一步推广到地理空间进而实现导航。此外,传统的陆基或星基无线电导航系统主要是针对特定频段的信号,NAVSOP则是通过接收环境中已有的多频段随机信号来实现,因此在对信号进行选择、预处理以及参数估计等方面都于传统的导航系统大相径庭。NAVSOP工作流程如图1所示。
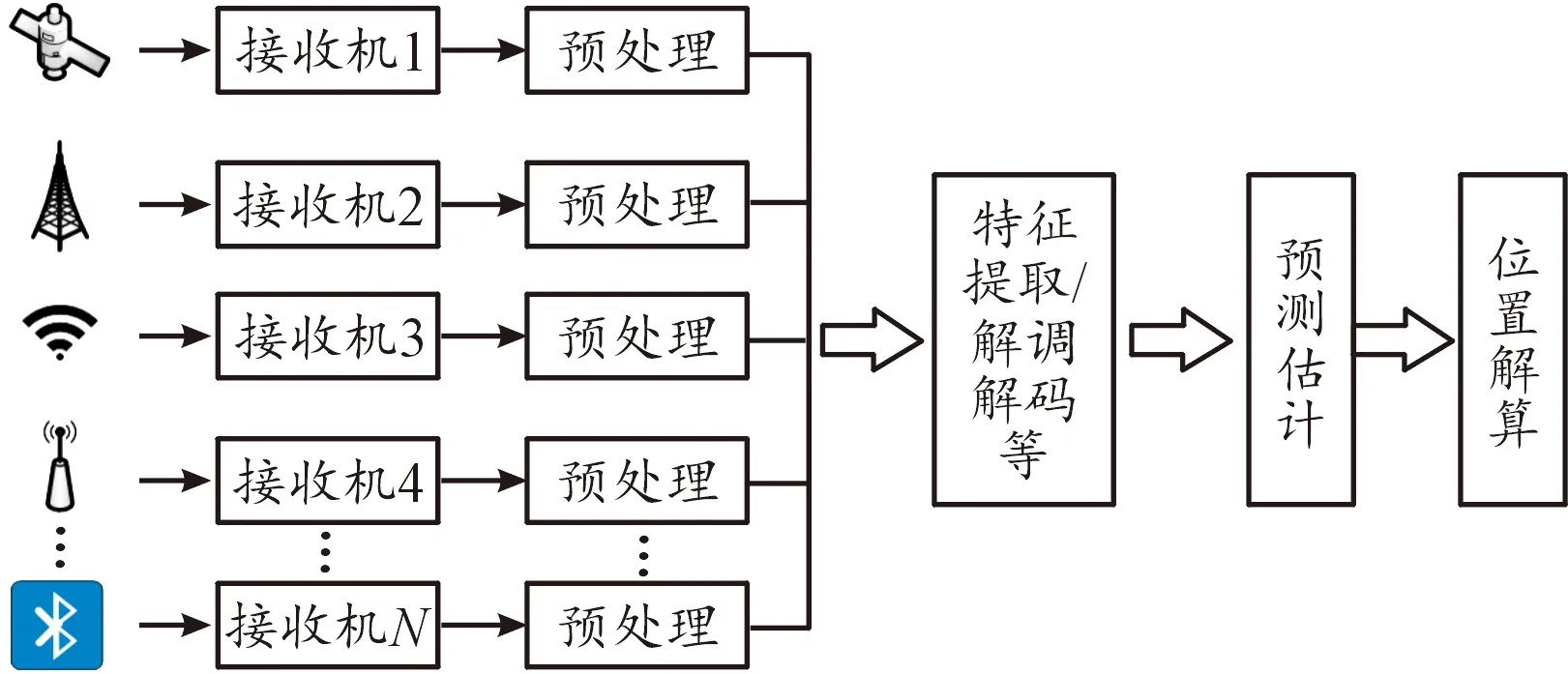
图1 NAVSOP的工作流程框图
2 机会信号导航定位方法
导航与定位常被并列提出,二者区别在于导航是针对运行体的运动控制技术,而定位则是一种公共的泛在信息服务。导航的核心是实现运行体的定位,NAVSOP的关键也在于利用信号进行定位。首先要选择合适的信号进行接收解调,接着确定定位参量,再根据定位模型建立观测方程,最后解算方程并评定精度。下面介绍NAVSOP中常用的定位方法以及影响定位精度的因素。
2.1 定位方法介绍
1) 基于TOA定位
基于TOA(time of arrival)的定位是一种测距定位法(信号的到达时间乘以传播速度得到距离)。当基站数量大于等于3时,便可估计出二维平面目标的位置;当基站数量大于等于4时,则可用于三维空间中目标的位置的估计。其原理如图2所示(以3个基站为例)。
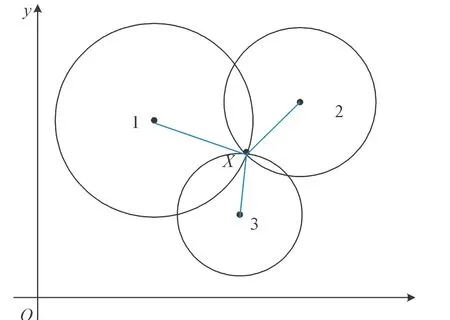
图2 TOA定位原理示意图
其中, 1、2、3分别为3个定位基站,为待测目标。设的坐标为(,),基站的坐标为(,)。
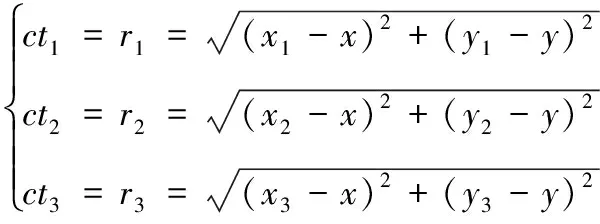
(1)
式(1)中:表示电磁波传播的速度,表示基站和目标之间的距离。在测量过程中不可避免地存在误差,利用最小二乘法,根据方程组(1)可以估计出目标的坐标为(,)。
TOA可在多路径环境中使用,并提供分米级测距精度。但是该方法不仅需要视距(line of sight,LOS)传播的条件,还要求目标和各个基站接收机的时钟严格同步,且网络设计较为复杂,加大了成本。
2) 基于TDOA定位
双曲线上的点到2个焦点距离之差为定值,基于TDOA(time difference of arrival)测距定位正式利用这一特性,将其中一个基站设为参考基站,分别以参考基站和其他定位基站为双曲线的焦点,通过目标到不同基站的到达时间差,获得目标到基站之间的距离差。该方法在定位时所需的基站数量和TOA一致。其原理如图3所示(以3个基站为例)。

图3 TDOA定位原理示意图
其中,1为参考基站,2、3分别为2个定位基站,分别以1、2和1、3为焦点画出双曲线,2个双曲线交点的位置即为待测目标。设的坐标为(,),基站的坐标为(,)。
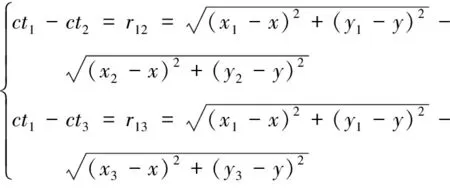
(2)
在已知基站坐标的情况下,可利用最小二乘法获得的坐标(,)。TDOA的只需基站之间时钟同步,不像TOA那样严苛,通过将各个基站通过同步线缆组建在同一个网络内便可实现上述要求。因此,TDOA在工程应用中应用广泛,但也需要LOS条件。
3) 基于AOA定位
基于AOA(angle of arrival)定位主要通过测量坐标已知的多个基站发射的无线电信号到达接收机的角度,根据角度值画出直线位置线,交点即为待测目标的估计位置。其原理如图4所示(以2个基站为例)。
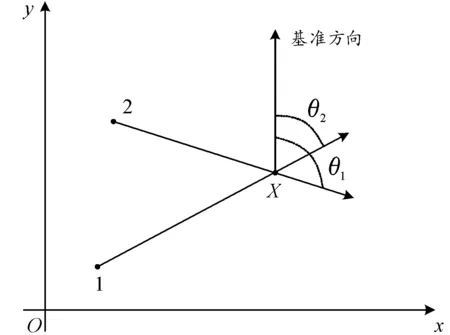
图4 AOA定位原理示意图
设目标的坐标为(,),2个基站的坐标分别为(,),(,),,则到各个基站的观测角与基站坐标的关系为:
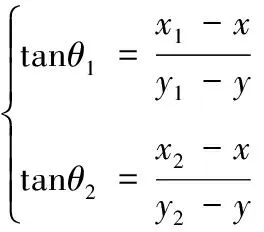
(3)
当基站数量大于等于2时,同样的,可以通过最小二乘法根据上式得到目标的位置。为了提高定位精度,常用的2种经典的谱估计方法分别是多重信号分类(multiple signal classification,MUSIC)算法和旋转不变子空间(estimating signal parameter via rotational invariance techniques,ESPRIT)算法。在实际应用中,一般采用阵列天线来获得AOA的估计值。
虽然基于AOA的定位方法需要的基站数量相对较少,也不需要严格的时钟同步,但是它对天线的要求比较高,也需要假定LOS条件,同时很容易受多径效应和信道衰落的影响。
4) 基于多普勒频率差定位
多普勒频率是由接收机和目标之间相对运动产生的。多普勒频率差定位是利用平台上接收机所侦收到信号的频率差来确定目标位置的一种定位技术,主要包括静止平台对运动目标、运动平台对静止目标、运动平台对运动目标(二者不是相对静止)3种。
以运动平台对固定目标的定位为例,定位原理如图5所示。设1、2为2个探测平台,为待测目标。设的坐标为(,,),平台1、2在时刻的坐标分别为(1,1,1)和(2,2,2),平台的运动速度为(,,),辐射源发射信号的频率为,假设基站在不同位置所接收到的频率差为,则
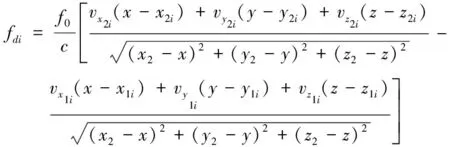
(4)
当接收机参数已知时刻通过式(4)确定一个包含目标的曲面,多次测量获得多个曲面,交点处即为目标的位置。
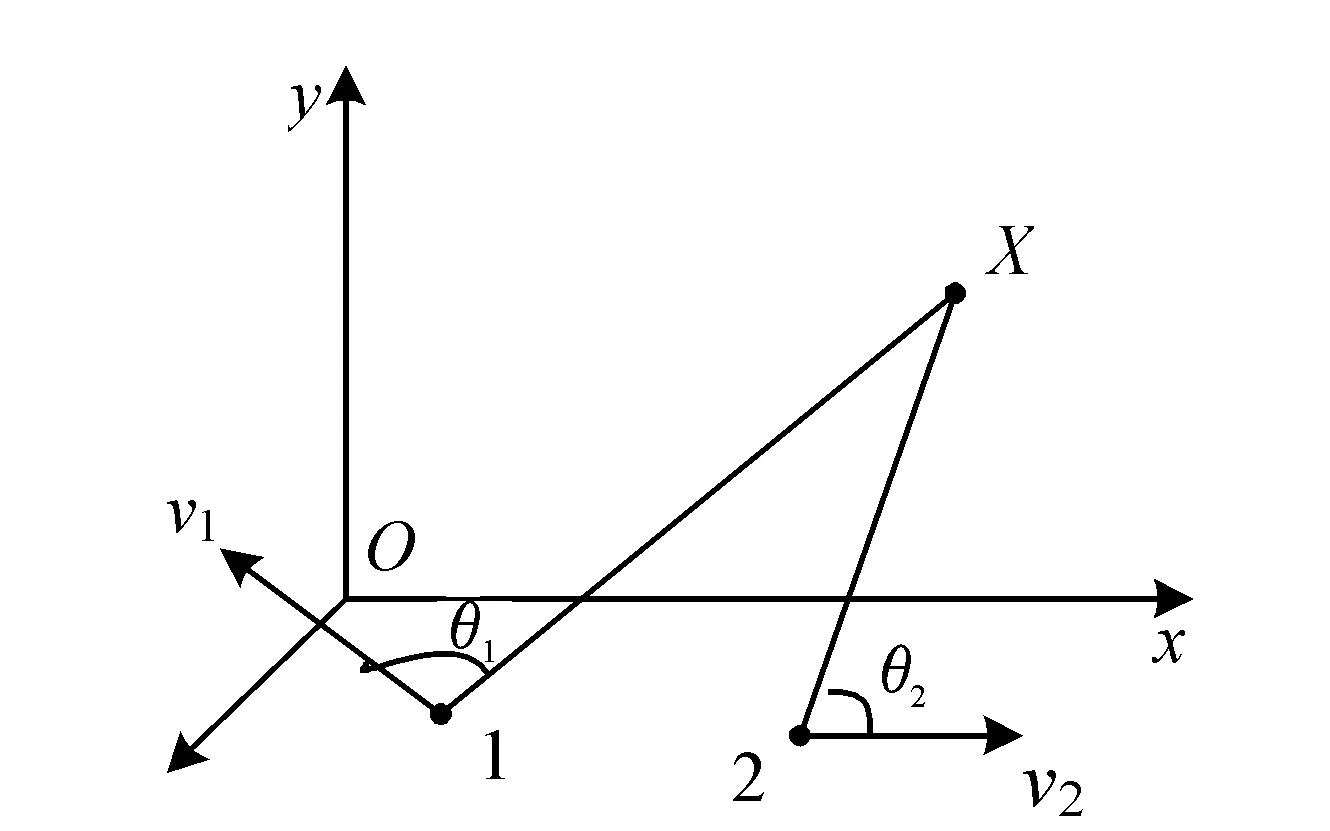
图5 多普勒频率差定位原理示意图
5) 基于RSSI定位
RSSI(receiver signal strength indication)定位法是通过信号强度和已知的信道衰减模型,根据定位目标所在位置的接收功率来推算发射AP(access point)与接收终端的距离,从而对目标位置进行估计。设目标的坐标为(,),基站的AP的坐标为(,)。其定位原理如图6所示。
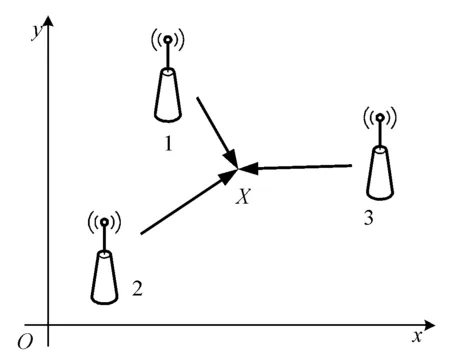
图6 RSSI定位原理示意图
根据传播损耗模型,基于RSSI的几何定位法建立接收功率与距离的关系为:

(5)
式中:()表示与发射源距离为处的接收功率,表示信道衰减系数,表示遮蔽因子服从均值为0的高斯分布。
基于RSSI位置估计的几何定位算法一般有2种:一种是对式(5)进行变换得到关于的表达式,再利用最小二乘法估计目标位置;另一种是利用式(5)中的参数建立似然函数,对目标位置进行极大似然估计,常用的估计方法有网格搜索法、共轭梯度法等。但是这类方法只适用于固定场所的定位。
另一种更常用的是基于指纹的RSSI值定位,基本流程:首先在离线阶段采集场景各个位置的RSSI指纹并进行预处理,构建一个数据库,在线定位时,根据实时获取的RSSI和AP地址与数据库中的值进行匹配,寻找最接近的点作为目标位置的估计值。
虽然不需要像TDOA和AOA方法一样提供利用RSSI定位需要预先知道发送信号强度和信道衰减模型,否则将无法估计距离。随着距离的增加,信号强度很容易受到受多径效应和信道特性的影响,因此RSSI多用于小范围定位。
6) 混合定位
由于各个独立的定位方法都或多或少存在着局限性,因此,研究人员尝试将这些独立的方法结合起来,获得一加一大于二的效果,混合定位应运而生。文献[7]介绍了一些常见的混合定位方法以及它们的优点,如表1。
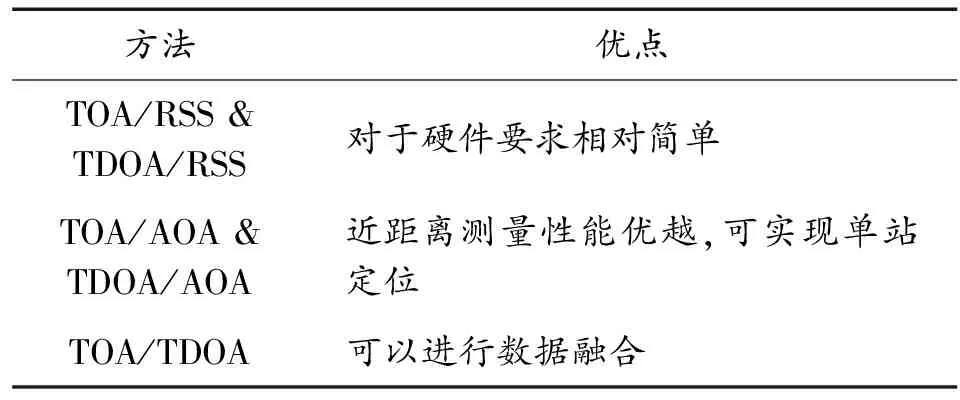
表1 常用混合定位方法
2.2 定位精度影响因素
一般来说,基于AOA和TOA/TDOA的方法比基于RSS的方法定位精确度更高,但是除了算法本身的误差,定位精度还会收到其他一些外界因素的影响,常见的有如下几个。
1) 多径效应
多径效应是指信号经过不同的路径传播后,各个分量到达接收端的时间不同,按各自相位相互叠加而造成干扰,使得原来的信号失真或者产生错误。多径效应对TDOA、AOA、RSSI的定位精度都会产生一定的影响。
2) 非视距传播
视距传播是指电波沿直线从发射点传播到接收点(一般要包括地面的反射波)的一种传播方式,它是获得较准确的信号特征量值的前提条件。非视距(non line of sight,LOS)直观的解释就是,当处在室内环境或者室外存在较为密集的障碍物时,收发设备“视线”受阻而无法“看到”对方,此时电波只能过反射、折射等方式进行传播,对目标的定位会有很大偏差。
3) 多址干扰
当环境中存在多个发射装置时,基站不止能够接收到目标发射的信号,还会接收到来自其他非目标设备所发射的信号,这些信号相互干扰从而对定位精度产生影响。针对这一问题,可以采取分时接收的方法。
3 机会信号导航定位技术现状
传统的机会信号包括调频和调幅广播信号、卫星无线电、电视信号、手机发射网等,随着通信和互联网的不断发展,涌现了如蓝牙、超宽带(ultra wide band,UWB)、可见光等一批新兴的数据类型。根据Fisher提出的NP(navigation potential)理论,某一些机会信号会比其他类型的信号更加适合导航,本章中将详细介绍一些常用的NAVSOP。
3.1 基于蓝牙信号的定位
蓝牙技术支持设备短距离通信,成本低、功耗小、定位方法简单,且由于体积小易集成在手机、个人电脑等移动设备上,终端只需开启蓝牙功能就可以在局域网覆盖范围被识别到,非常适合用于小范围室内定位。一般通过建立RSSI值与距离的模型来实现定位:首先铺设蓝牙信标,信标向周围广播信号和数据包;当设备进入信号覆盖的范围时,测出其在不同基站下的RSSI值;最后通过蓝牙设备内置的定位算法测出具体位置。但基于RSSI的模型建立往往存在困难,针对此类问题,研究人员寻求指纹定位的方法,文献[20]详细研究了低功耗蓝牙(bluetooth low energy,BLE)的指纹,并量化了连续BLE扫描的真实功率成本,进一步分析BLE定位系统中关键参数的选择,包括信标密度、发射功率和发射频率等。
蓝牙信号一般用于室内定位,除了距离对定位精度有所影响,还需要注意墙壁等遮挡物、阴影衰落、多径衰落等问题,需要有针对性地建立模型。
3.2 基于UWB信号的定位
UWB通过收发信机之间的纳秒级窄脉冲来实现数据传输,功耗低、穿透性强、不易被截取。基于RSSI和AOA定位的算法不能发挥出UWB信号的优势,因此一般选用测距定位的方法。在LOS条件下,信号直达经(DP)一般为接收信号强度的最强径(SP),此时利用TOA算法检测接收信号的峰值即可获得脉冲到达时刻;在NLOS条件下DP不一定是SP,此时需要用TOA算法进行检测,包括相干和非相干检测2种。
TOA的时钟同步要求很高,难以实现,而TDOA的只需接收机时间同步就能实现同等的定位效果,因此在工程中应用更多。不过要保证接收端的时钟同步也绝非易事,同时解算TDOA算法得到的非线性方程也是一大挑战。文献[25]提出了一种“Whistle”方法,利用几个异步接收机分别记录目标信号和一个人工生成的连续信号,根据双信号传感和采样计数技术,可避免时间同步同时实现时间高分辨率;不同于上述的直接消除时间同步技术,文献[26]通过指定一个“主”基站周期性地向“从”接收站发送时钟校验包,跟踪从站相对主站的时钟变化趋势,再通过同步定位算法保持主从站的时钟同步。
3.3 基于Wi-Fi信号的定位
随着无线网络的覆盖和智能手机的普及,在公共场所中,Wi-Fi网络的接入点随处可见。与蓝牙信号相比,Wi-Fi信号的覆盖范围更广。传统的定位方法如TOA、TDOA、AOA等均可使用,但是额外的设备需求增加了成本,而且室内环境复杂,非视距传播以及多径效应的存在也为传播模型的建立带来了难题,因此利用Wi-Fi信号的RSSI指纹定位技术成为了最佳选项。
基于RSSI指纹定位算法一般有2个方向:一种是利用确定性数据进行数据匹配;一种是利用基于概率的数据进行匹配判定。建立确定性数据的指纹数据库,一般是将一段时间内参考点的多个AP(access point)的RSSI值取平均作为该点的指纹特征值,在进行定位匹配时,通常以距离或者相似系数来判别数据之间的相似性,文献[28]介绍了一些常用确定性匹配方法,如表2所示;建立基于概率的指纹库时则需要保存一段时间参考点的RSSI值概率分布情况,再根据贝叶斯理论估计待测点出现在每个参考点的后验概率并将其作为权值,再通过WKNN算法最终确定待估计点的位置。
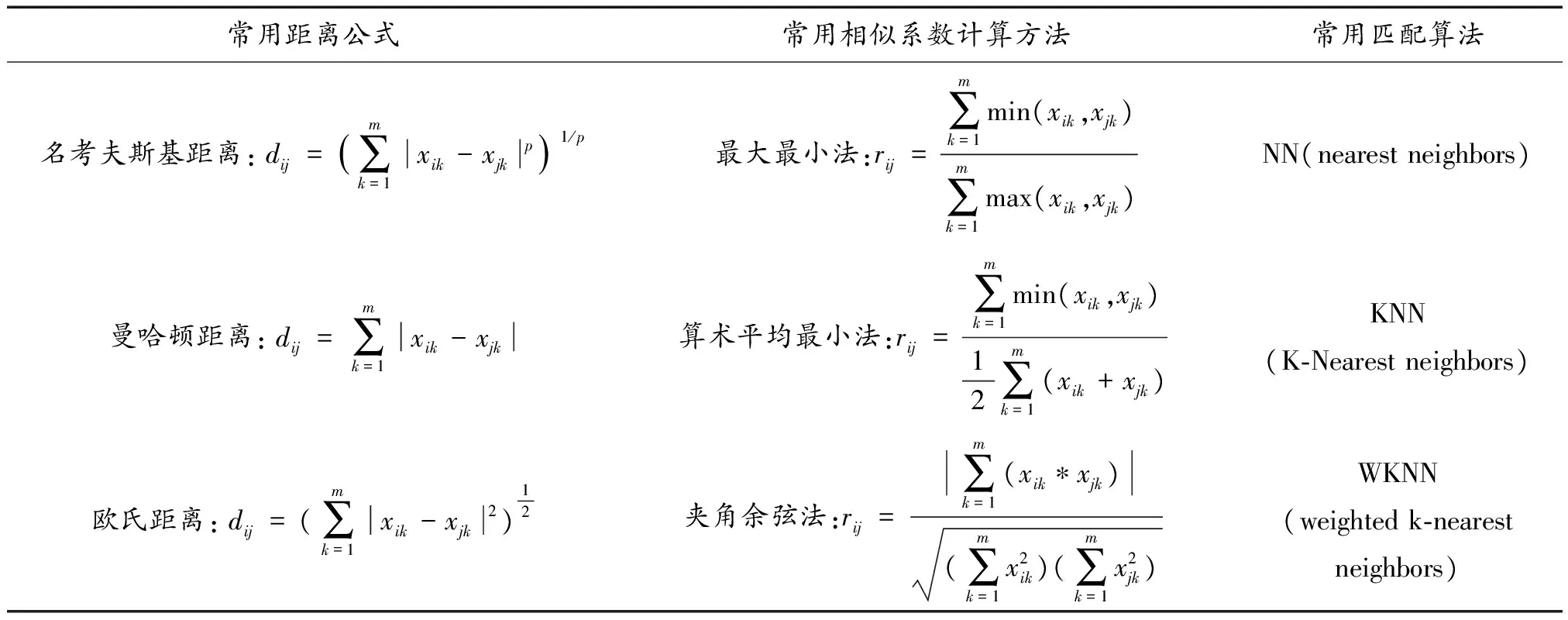
表2 常用确定性匹配方法
目前,针对Wi-Fi信号导航目前的研究重点是指纹数据库的构建以及定位精度的提高。文献[29]提出了一种层级学习室内定位系统(hierarchical deep learning indoor localization framework,HDLIL),采用基于变分自编码(variational autoencoder,VAE)的特征提取模块来表征训练数据的潜在表示,以此来获取可靠的指纹;文献[30]针对空间中RSSI指纹特征变化快且难以获取的情况提出了一种Fast Graph Enhanced算法,扩展了用于模拟无线电环境的三维力导向图,不仅可以提供高精度定位,而且在一些新兴领域如自动驾驶导航也有良好的应用前景。
3.4 基于调频广播信号的定位
与蓝牙、Wi-Fi、UWB信号相比,调频(frequency modulation,FM)广播信号不仅发射基站多、覆盖范围广、信号稳定性高、受干扰小,还有接收成本低的优点,因此是非常适合用于导航。利用FM进行导航主要是基于RSSI来进行定位,有建立信号传播模型和指纹定位法2种方法。而在复杂环境下,FM信号的传播模型会受到多种因素影响,难以建立,因此本节主要介绍FM的指纹定位法。
指纹定位法主要是利用环境信道特征的不同来进行定位,根据信号强度RSSI的差异性,创建RSSI向量与位置坐标之间的对应关系,并将其存储在指纹数据库中,在定位时,利用匹配算法寻找节点对应的位置坐标。Yoon等通过测量室内多个点的RSSI值,综合考虑LOS、NLOS、窗户尺寸、墙壁等多个因素,可得模型:
(,)=max[(,),(,),(,)]
(7)
其中,

(8)

(9)

(10)
其中:代表FM信号发射基站的位置,为待测点,(,)、(,)、分别代表LOS信号、NLOS信号以及其他间接路径信号强度,表示路径损耗因子,表示墙壁损耗因子,表示在非视距情况下的某个常数损失值,根据实测数据先得出3个因子的值,并在工作过程中实时校正。
文献[32]针对外界因素对指纹数据准确性的影响,提出了基于迁移学习模型的指纹库动态校准算法,通过采集不同时间段的少量校准参考点的数据,来实现对智能终端的实时定位,显著提高现有FM算法定位综合性能的同时还节约了人工成本与时间;为探究基于FM的室内定位的长期性能,文献[34]收集了多个大型多层测试平台上的数据集,由此评估FM信号在真实环境中的效果,并研究了不同分类器、训练比例和指纹大小对定位精度的影响,结果表明,从长期看FM信号在室内定位方面具有鲁棒性;
基于指纹定位的FM导航算法以其良好的性能在室内有着良好的应用,定位精度可以媲美Wi-Fi信号但同时受到多径、衰减等问题的影响比Wi-Fi小,此外,将二者结合生成无线指纹用于定位的准确率更高;而在室外定位时,由于空间传播以及建筑物和地形的遮挡,信号衰减比较严重,定位精度不高,因此常与GNSS结合使用。
3.5 基于地面数字电视信号的定位
数字电视信号的带宽较宽(6 MHz以上)、频率低,非常适合城市传播,而且不会像GPS信号那样受到电离层和多普勒效应的影响。世界三大数字电视标准有美国的ATSC、欧洲的DVB-T和日本的ISDB-T,中国卫星数字电视采用和美、日、欧洲同样的标准,地面数字电视采用自主研制的 DTMB。DTMB帧结构的基本单元是信号帧,包括帧头和帧体2个部分。定位过程只需要利用帧头已知的PN序列进行同步和提取传输实时延,并利用不停的频率区分发射机。通常采用基于时间的测距定位方法,而TOA的要求更为严苛,本文中主要介绍TDOA法。
基于DTMB的TDOA定位技术,是通过广义互相关来提取不同地面数字电视发射机的到达时间差,从而确定接收机的位置,其定位精度取决于通过广义互相关提取到的时间差精度,定位系统如图7所示。数字电视发射机的位置可以作为已知量存储起来,接收设备需要接收最近的3个空间独立的发射机的数字电视信号,并完成对发射机的伪距测量,计算出用户接收机的经纬度和时钟偏差,进而确定用户的位置。在发射端,将有用信息加到发射信号中,再对PN头进行BPSK调制以获得可靠的传输效果;在接收端,提前将发射机的坐标存放在接收机的处理器中,通过与发端相同的PN序列产生本地PN序列,将其与接收信号的PN码帧头进行相关运算,根据PN序列的相关特性,通过检测相关峰峰值的相对位置便可估计出不同接收机的到达时间差。
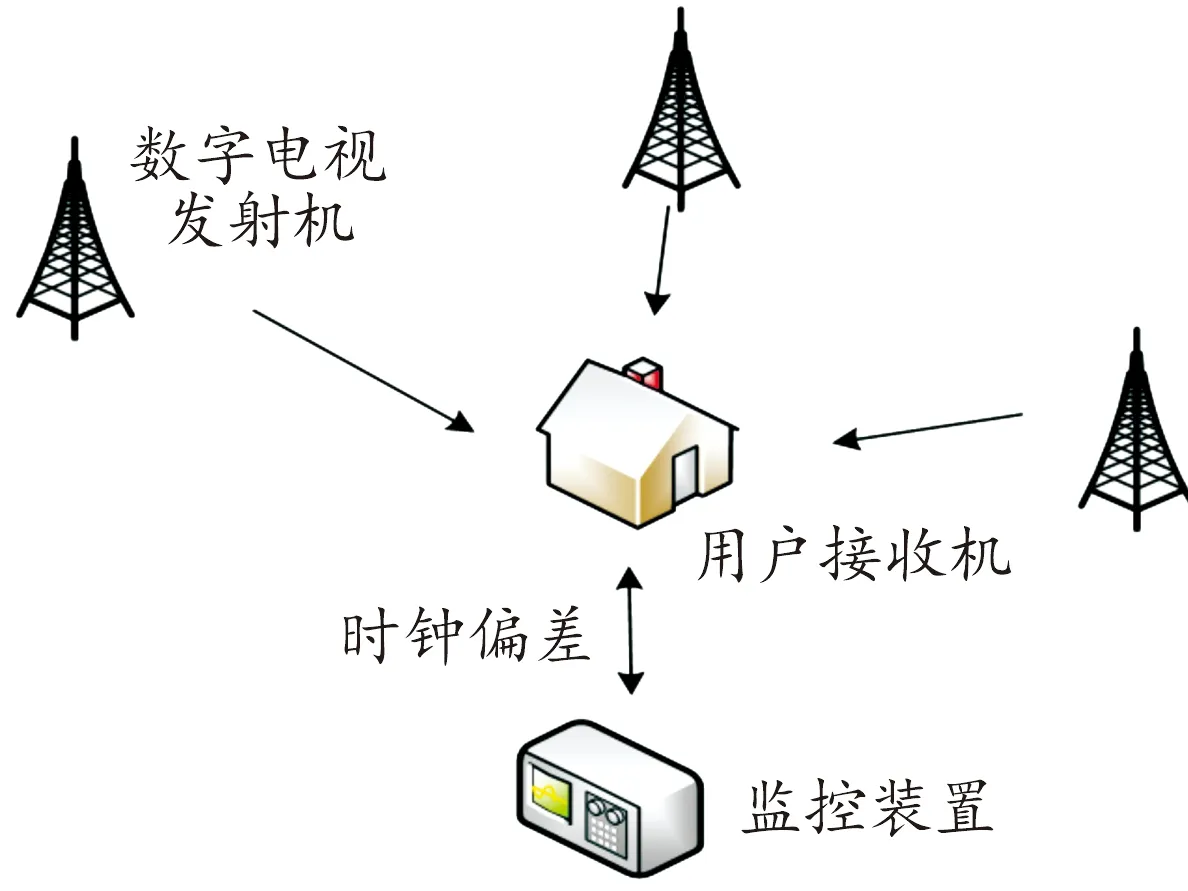
图7 DTV定位系统示意图
目前针对DTMB导航也有学者做了大量研究,文献[39]开展了基于DTMB和RSSI移动终端的导航信息提取技术研究,完成了DTV的高精度测距;文献[40]根据已有的DTMB框架,对测距定位进行了详细研究,利用PN序列良好的相关特性对整数和分数阶传输时延进行估计,可以在不影响现有DTMB接收机的情况下获得精确定位。
3.6 基于低轨卫星信号的定位
低轨(low earth orbit,LEO)卫星星座地面接收信号强度高、几何图形变化快,具有较大的多普勒频差和较高的可见星几何位置多样性,在NAVSOP中有着广泛的应用。LEO星座系统主要应用于对地快速观测预警、信息通信等方面,常用的导航算法主要有多普勒频率定位和测距定位,其中测距定位包括测码伪距定位和载波测距定位。
基于LEO卫星的定位以多普勒频率定位为主,该方法最少只需对一颗卫星进行连续追踪,且不需要测量目标的角度信息和时差信息,不要求卫星姿态,只需要测量多普勒频率或者变化率即可;测码伪距单点定位通过接收机接收多颗卫星测码伪距信息实现实时快速定位,而载波测距定位则是通过接收多颗卫星载波相位信息测距来实现定位,具有更高的精度和平滑性。
作为一种可靠有效的导航增强手段,LEO卫星信号备受关注。考虑到单LEO星座机会信号定位面临的构型不足问题,文献[44]提出Iridium/ORBCOMM机会信号融合定位的方法;而对于跟踪效率低的问题,文献[45]基于STAN导航范式,利用来自LEO卫星的多普勒频率和伪距测量,提出了一种时延神经网络(TDNN)算法,相较于扩展卡尔曼滤波,可以很好地提高卫星的跟踪性能。
3.7 基于可见光信号的定位
白光LED凭借其绿色环保、成本低廉、不易受电磁干扰、兼具照明和定位功能等特点,在众多数据类型中脱颖而出。LED的导航常用的定位算法主要有几何测量法、场景分析法、近似感知法和图像传感器成像法4种。
几何测量法是主要是利用参考点(LED灯的位置)和待测点之间的几何关系,再进行运算来获得待测点的位置信息。常用的确定几何关系的方法主要有三边定位法(基于RSSI)、三角定位法(基于AOA)和双曲线定位法(基于TDOA)3种,但是这类方法往往无法同时具备高精度和低复杂度。
场景分析法即指纹识别法,是指通过观察场景中的特征来推断待测目标位置的一种方法,类似于前文提到的基于RSSI的指纹识别法,这里也包含离线阶段和在线阶段。离线阶段建立采样点与移动设备对应关系的数据库,在线阶段实时测量并进行匹配以确定目标位置。这种方法虽然定位速度快且性能稳定,但是离线阶段的成本太高。
基于邻近关系的近似感知法利用节点间的邻近关系及连通性实现定位,是一种非测距的定位算法。首先布置特定的LED阵列并将它们作为服务接入点,发射带有位置信息的光信号;当用户终端进入服务接入点的通信范围内时,便可获取该灯的位置信息,再由服务器在数据库中查找返回接入点的位置及有可能的通信覆盖范围。广告牌算法和质心算法常用于确定用户终端位置,广告牌算法是直接将接入点作为用户终端的位置,而质心算法是将用户终端所接入点的坐标平均值(或加权值)作为其位置坐标,有助于提高测量精度。
图像传感器成像法的原理是在一个平行于LED灯和图像传感器之间的平面上放置一个透镜,同时保证三点(发射点、透镜中心和接收点)共线,如图8所示,再利用几何关系便可以计算出待测点的位置坐标。这种方法不仅可以快速定位,还具备很好的可移植性,且精度较高,是未来LED室内定位的主要研究方向。

图8 图像传感器法定位示意图
4 机会信号导航的优点与不足
4.1 NAVSOP的优点
1) 信号资源丰富,用户选择多样。从第三章中可以看出,在空间中存在着大量不同类型的机会信号,这就使得用户可以根据应用场景选择的一种或几种机会信号进行导航,以弥补GNSS的缺失。此外,由于信号类型丰富,能够提供大量互补数据,有助于提高定位的精度。
2) 机会信号功率高且穿透性强。GNSS发射的信号经过远距离的传输,到达地球表面的信号强度非常弱,远小于周围环境中的SOP。以GPS信号和FM信号为例,GPS信号大约是以282 W的有效各向同性辐射功率从20 000 km的高空发射,相比之下,另有一个30 km外有效辐射功率为 50 000 W的调频电台,二者到达接收机的信号强弱不言自明。此外,机会信号以较低的频率传输,伴随着强信号功率,在遇到障碍物的时候穿透性更强。
3) 不需要考虑设备部署。由于周围环境中已经存在了机会信号,所以无需建立额外的发射机,大部分的信号都可以被用户直接获取,并且可以较为方便地集成在手持设备等移动端上,减少了接收机的部署。
4) 无线电技术的进步使得机会信号导航可行性更高。不论是硬件层面的设备性能不断改善、例如发射基站信号更稳定,还是算法层面的理论创新、例如计算方法的更新,都带来了NAVSOP领域的繁荣与发展。
4.2 NAVSOP存在的不足
近年来,机会信号导航的研究虽然已经得到蓬勃发展,且具备诸多优点, 但是还是存在着一些不足之处:
1) 机会信号的时钟不够稳定。时间信息的获取是测距定位中非常重要的一环,GNSS的时钟可以达到纳秒级精度且稳定度很高,而机会信号往往无法达到这样的水平,且某些SOP例如电视信号的发射机时钟非常不稳定,这给基于时间信息的定位带来很多困难。
2) 多径效应和非视距传播问题。根据2.3节的分析,多径效应和NLOS问题是影响定位精度的主要原因,同时还会对授时造成,寻求的解决方案大多是基于特定信号的特定算法,可以针对性地缓解但不具备普适性。
3) 应用场景受限制。NAVSOP多用于室内环境,主要针对的GNSS被遮挡的问题,对于作战环境中的恶意干扰研究的相对较少。而且蓝牙、Wi-Fi、UWB覆盖的范围只存在于室内或者小范围的室外,发射机高度受限,发射机的地理位置也受限,FM、DTV等机会信号在空中虽然存在但是不够稳定,难以集中利用,不具备地理位置多样性的同时还会影响定位精度,这为后续的研究提出了一个很大的难题。
5 结论
NAVSOP已然成为导航领域不可或缺的一部分,对于今后的研究,有以下的几点建议:
1) 分段互补、分时接收。在多径环境中,基于射频特征的位置匹配和对固定的不同多径分量的利用,都可以采用分段互补;当非目标信号干扰接收基站时,则可以对发送端采取跳时扩频的方式,接收端采用分时接收的方法。
2) 多信号混合与多数据融合。由于SOP种类多样且功能不尽相同,采用融合定位,可以有效地应对复杂多变的环境。目前基于传统的无线电信号导航已经有了相当成熟的处理体系,但是光信号等非无线电信号还有很大的探索空间。此外,如何实现不同类型信号的兼容与数据集成也需要开展深入研究。
3) 开发更具普适性的定位算法。由于SOP种类多样,每一种信号适用的定位算法也不尽相同,在实现信号融合的基础上,开发出一种普适性较强的定位解算算法迫在眉睫。不仅更加方便还可以简化计算节约资源,在低信噪比与信号严重交叠的情况下实现信号分选。
4) 探索机会信号在多个场景下的应用。随着硬件设备性能的不断提高,机会信号的强度、稳定性以及覆盖范围都在不断提高,很多信号(如Wi-Fi)在室外环境也有一定的覆盖;而LEO卫星信号在沙漠、海洋等区域是一种有效辅助导航手段,同时这类信号由于到达地面强度高、不易被遮挡,在室内定位也有非常好应用前景。
