危险驾驶环境下高速公路施工区交通冲突研究*
2022-08-09吴宇晟马永磊李孟晖
吴宇晟,马永磊,李孟晖
(1.江苏省交通工程建设局,江苏 南京 210004;2.中国港湾工程有限责任公司,北京 100027)
随着交通流量的持续增长,高速公路服务水平不断降低,个别路段拥堵严重,已不能适应区域交通运输需求。京沪(北京—上海)高速公路是高速公路网络中主干线,承担着南北方向的主要交通运输任务,其改扩建具有大交通量的工程施工、影响路网的规模较大的特征,有必要科学系统地探究京沪高速公路改扩建施工期间的通行安全。
道路冲突技术于20世纪50年代应用于交通安全领域。张南等基于后侵入时间将交通冲突划分为3个等级,并对影响交通冲突严重程度的因素进行了分析。Guo Yanyong等基于交通冲突技术对交叉口左转车辆的交通冲突和严重程度进行分析,确定了左转弯车道冲突车辆百分比。Suwarto F.等通过分析城市交叉口的交通冲突数,提出了基于距离事故发生时间的道路冲突严重程度划分方法。Shen Li等使用替代安全评估模型和VISSIM对高速公路合并区进行了安全评估。李燊使用碰撞时间作为交通冲突评价指标划分交通冲突严重程度。郑展骥等运用间隙接受理论研究了道路行驶冲突对车头时距和交通流特性的影响,并确定了道路冲突区间。Mahmud S.M.S.等分析了发展中国家道路安全问题和现有碰撞数据库的局限性,认为使用交通冲突技术评价道路安全已相当成熟。丁柏群等基于交通冲突数据提出了冲突严重度模型,并采用道路冲突技术确定了交叉口的潜在危险状况。张诗雯等基于交通冲突指标距离碰撞时间和后侵入时间构建间接交通冲突模型及神经网络模糊系统模型,判别货车比例与交通冲突的关系。林兰平通过量化车头时距、交通量,提出后侵入时间的概念,并据此判别交通冲突严重程度。上述对施工作业区交通安全的研究大多忽略了车辆危险驾驶行为,而这些行为对周边车辆会产生较大冲突。该文采用京沪高速公路扬州段视频数据获取车辆的行驶速度特征,识别危险驾驶行为车辆,并对交通冲突模型进行测试。
1 高速公路施工作业区危险驾驶识别
危险驾驶行为的检测设备包括:1) 用户随身携带的设备即手机。手机中包含GPS、蓝牙、Wi-Fi等多种传感设备,通过这些传感器可获得多种驾驶行为数据。2) 道路监控设备。当前高速公路上布设了雷达、摄像头等信息设备,可有效采集车辆行驶状况,如车辆速度、轨迹等,为危险驾驶行为分析提供数据支撑。3) 车载信息设备。随着智能网联技术的发展,车载设备越来越智能化,可实时记录车辆行驶速度、加速度、转角速率等数据,保障高速公路施工作业区危险驾驶行为的可靠识别。
该文基于高速公路监控设备视频数据分析和识别危险驾驶行为,将危险驾驶行为分为分心驾驶、超速驾驶和鲁莽驾驶3类。分心驾驶主要表现为驾驶员在高速公路施工作业区边开车边使用手机,如观看网页、看视频、打电话等,这些行为严重阻碍驾驶员对车辆的正常操作,给道路通行安全带来很大隐患。超速驾驶的识别主要根据施工区当前限速状况,通过监测车辆行驶速度确定车辆是否超速。鲁莽驾驶主要通过判别车辆运行状况进行识别,如是否急变道、急变速等。
1.1 分心驾驶的识别
通过监测高速公路施工作业区驾驶员实时状态(是否使用手机)识别分心驾驶行为。设当前时间窗口内车辆行驶状态为Kt,Kt=1为车辆在道路上正常行驶,Kt=0为车辆停止在道路上。以Ft表示驾驶员当前特征,Ft=1表示正在查看手机,Ft=-1表示未查看手机。采用连续10个窗口(样本数N)的数据进行分析,滑动窗口之间重叠1 s,保证算法的稳定性。分辨率和总识别窗口分别设为1 s、10 s。分心驾驶概率Pt按下式计算:
(1)
根据式(1),驾驶员使用手机(Ft=1)时分心驾驶概率Pt增大,反之Pt减小;车辆处于停止状态(Kt=0)时Pt=0,表示驾驶员未在行驶过程中使用手机,因而未识别为分心状态。设定:若Pt≤0.4,分心驾驶程度较低,危险性较小;若0.4
1.2 超速驾驶的识别
通过获取作业区车辆当前位置的速度、路口状况和限速等信息进行超速驾驶识别(见图1)。

图1 超速及违停识别流程
1.3 鲁莽驾驶的识别
1.3.1 模型分析与特征提取
与正常行驶的车辆相比,鲁莽驾驶车辆的行驶速度、加速度等会出现差异,如急变道、急变速等。通过现代车载信息技术实时监测车辆速度、加速度等行驶特征数据,分析车辆急变速、急变道特征。与正常行驶车辆状况相比,急变速车辆的纵向加速度具有更大的震荡方差和幅值,急变道车辆的横向加速度具有更大的震荡方差和幅值,可通过车辆纵横向加速度震荡范围和方差分析识别鲁莽驾驶行为。鲁莽驾驶特征提取指标见表1,其中幅值定义为:

表1 鲁莽驾驶特征提取指标
Range(x)=Mean[Top10max(x)]-
Mean[Top10min(x)]
(2)
1.3.2 有监督分类模型
设计有监督分类算法研究行驶车辆的鲁莽驾驶行为,主要包括急变速和急变道。运用支持向量机判别鲁莽驾驶行为,包括正常驾驶模式、急变速模式和急变道模式,并采用软间隔最大分类方法,以增强分类模型的抗噪能力。表达式如下:
(3)
式中:ω为权重;b为截距;ζi为噪声扰动;C为软间隔惩罚系数;N为观测样本数;xi为训练数据。
2 高速公路施工作业区交通冲突技术
车辆在高速公路施工作业区行驶过程中通常伴随跟驰、合流、分流等一系列复杂的驾驶工况,危险驾驶行为的存在,更加剧了驾驶危险程度。
2.1 高速公路施工作业区交通冲突机理与类型
在存在危险驾驶的环境下,高速公路施工作业区交通运行特征与正常道路相比存在显著差异,车辆行驶过程中需经历跟驰、变道、合流、分流等复杂驾驶工况,这些复杂行驶工况正是产生交通冲突的主要原因。车辆的变道和车速的离散,使道路交通冲突的概率大大增加,容易造成严重的事故后果。图2为危险驾驶环境下高速公路施工作业区道路冲突产生过程。
从图2来看,施工作业区道路冲突受到人、车、路等方面属性的共同作用。研究表明,在各项因素中,交通流特性和道路特性对交通冲突的产生更具有规律性,而人的影响具有不可控性,相同道路环境下,不同驾驶员采取的随机行为往往会导致不同的冲突结果。

图2 危险驾驶环境下施工作业区车辆冲突机理
依据上文对高速公路施工作业区道路冲突的分类,根据实际道路行驶状况,高速公路施工作业区交通冲突主要包括追尾冲突和换道冲突。
(1) 施工作业区追尾冲突。在t时刻,若前方车辆速度小于后方车辆速度,且两车之间不满足安全间距限制,如果后方车辆不及时采取安全避让措施,前后车可能产生追尾碰撞。高速公路施工作业区危险驾驶车辆的行驶速度具有较大离散性,且通常车速较高,加上后车驾驶员视野受限,无法及时获取前方道路信息,与跟驰车辆发生追尾冲突的风险大幅提升。
(2) 施工作业区换道冲突。换道一般包含强制换道和自由换道。强制换道是指由于道路环境改变,经过交通警示标志的指引车辆强制进行换道。自由换道是指驾驶员为了寻求驾驶的舒适感和行车效率,主动进行换道,一般表现形式为超车。高速公路施工作业区道路环境发生改变,车辆通过寻求可插入间隙进行变道操作,换道冲突一般为自由换道。在危险驾驶环境下,车辆的换道次数相较于正常路段显著增加,换道冲突的风险概率随之增加。
2.2 交通冲突判别技术
距离碰撞时间(TTC)是目前广泛使用的交通冲突衡量指标之一,主要用于评估同一车道中两车之间的追尾冲突风险。在t时刻,前方车辆速度小于后方车辆速度且两车之间不满足安全间距约束,如果两车不进行避险,继续保持现有行驶状态,从时刻t到前后两车发生追尾碰撞所经过的时长即为TTC。计算公式如下:
(6)

由于运动车辆之间的距离难以观测和获取,以车头时距替代车头间距衡量和计算TTC,采用车头间距和车头时距进行转换:
(7)
(8)
式中:di为两车之间的车头间距;H为两车之间的车头时距。
HTTC指标提供了一种定量区分道路冲突的方法,其临界值的不同影响判别精度,若临界值大于HTTC,表明交通冲突严重。但使用者和道路特征不同,HTTC的临界值会发生变化,公路中通常取HTTC=2 s。
3 交通冲突阈值计算
采用京沪高速公路扬州段视频,使用视频处理软件Tracker 4.9对视频中的车辆轨迹信息进行处理,获得车辆行驶速度和加速度,从纵横向加速度特征分析正常行驶车辆与鲁莽驾驶车辆行驶状况的差异,判别鲁莽驾驶行为(见图3~5)。

图3 正常行驶车辆与鲁莽驾驶车辆纵横向加速度对比
对正常行驶、急变速和急变道3种行驶状态进行有监督分类,基于不同尺度的时间窗口对模型的分类效果进行评估。有监督分类算法系数如下:类别数为3;采用L2惩罚项;软间隔惩罚系数C=0.3。不同样本窗口范围下有监督分类算法的精度见图6。由图6可知:样本窗口范围超过13 s时,有监督分类算法的准确率、急变速召回率、急变道召回率都超过90%,说明13 s的时长可有效保证对鲁莽驾驶行为的识别。

图4 正常行驶与急变速状态下纵向加速度差异

图5 正常行驶与急变道状态下横向加速度差异

图6 不同样本窗口范围下有监督分类算法的精度
85%累积分布曲线法是统计学中常用的分析方法,依据实测累积分布曲线拟合的速度特征,选择与85%累积分布对应的速度作为限速值。采用85%累计分布曲线法获取严重道路冲突和一般道路冲突的累计概率,得到道路冲突严重程度的判别阈值。以0.1 s为间隔将道路冲突值均匀分割,确定道路冲突的阈值大小。通过对HTTC进行描述性统计分析,获得高速公路施工作业区危险驾驶车辆交通冲突HTTC阈值(见表2)。

表2 基于HTTC的交通冲突判别阈值 s
通过视频实时抓取3辆车的交通冲突状况(见图7),对比发现采用上述交通冲突模型能高效识别交通冲突。
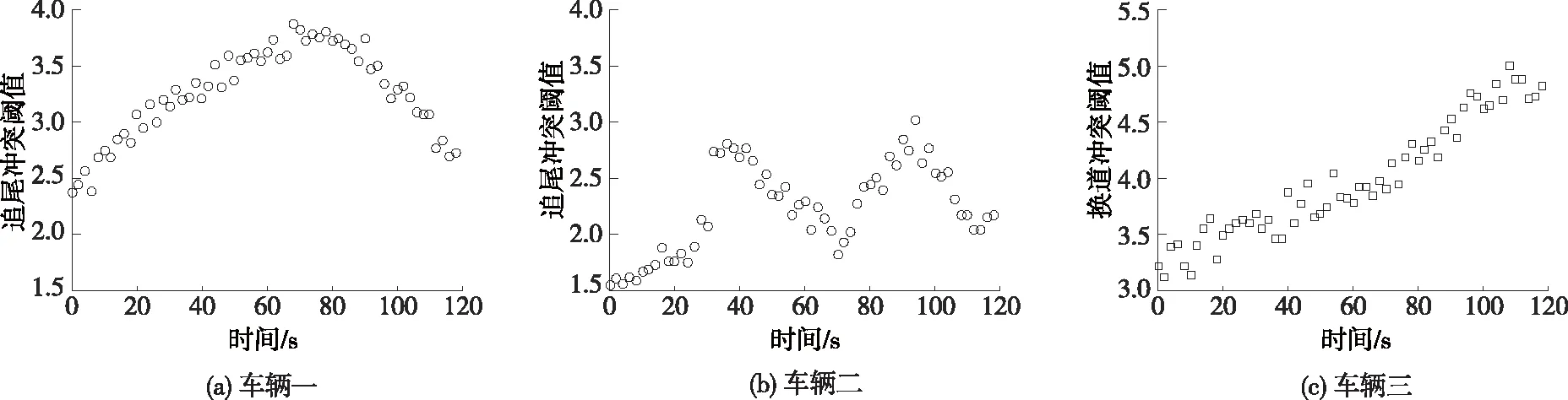
图7 交通冲突实时判别
4 结语
运用道路监控设备检测数据判别高速公路施工作业区分心驾驶、超速驾驶和鲁莽驾驶3类危险驾驶行为,基于驾驶员状态进行分心驾驶识别,基于速度值、路口状况和限速等信息进行超速驾驶识别,运用监督分类模型进行鲁莽驾驶识别。将高速公路施工作业区道路冲突分为追尾冲突和换道冲突两类,并建立距离碰撞时间模型确定道路冲突状况。
通过京沪高速公路扬州段视频数据对危险驾驶行为进行判别和交通冲突分析,结果表明:在样本窗口范围超过13 s时,有监督分类算法的准确率、急变速召回率、急变道召回率均高于90%;追尾冲突的一般和严重阈值分别为3.7 s、2.1 s,换道冲突的一般和严重阈值分别为4.9 s、2.7 s。后续将在实际高速公路施工作业区对所建立的安全分析方法进行应用研究。
