基于模糊控制的燃料电池汽车能量管理研究*
2022-08-09刘静孙闫
刘静,孙闫
(1.南京交通职业技术学院 汽车工程学院,江苏 南京 211188;2.江苏大学 汽车与交通工程学院,江苏 镇江 212013)
燃料电池通过氢氧化学反应生成水,同时产生电能给车辆供电,其间燃料电池不会产生任何有害气体排放,因而近年来燃料电池在大巴车上得到推广应用,并逐步推广到乘用车。文献[3]分析了基于燃料电池和电池,基于超级电容、电池和燃料电池,基于超级电容和燃料电池的混合动力系统及能量管理策略。文献[4]认为燃料电池内部电化学和热力学反应缓慢,限制了其响应电气负载瞬态变化的速率,当超级电容器或电池与燃料电池搭配并用作辅助存储元件时,系统可通过削峰填谷的方式利用辅助存储单元快速响应负载的瞬态变化。文献[5]在车辆中引入混合动力系统,将燃料电池与牵引电机所需的电流分离,从而使燃料电池尽可能接近其高效区。文献[6]通过电池或超级电容回收减速和再生制动器制动产生的能量提高系统的能量利用效率,减少燃料电池系统规模,降低系统总质量。另一方面,混合拓扑和复杂的能量流给系统提供了额外的自由度。可见,能量管理是影响燃料电池汽车动力性、经济性的关键。该文基于模糊控制策略研究燃料电池汽车的能量管理策略。
1 能源系统建模
1.1 整车模型
对于基于电池和燃料电池的混合动力车辆,对瞬时功率需求进行数学建模具有重要意义。整车阻力包含滚动阻力、空气阻力、加速阻力和坡道阻力,整车需求功率计算方式如下:
(1)
(2)
式中:Pm为整车需求功率;Fw为空气阻力;Ff为滚动阻力;Fi为坡道阻力;Fj为加速阻力;v为车辆速度;ηm为机械传动效率;Cd为空气阻力系数;A为迎风面积;ρ为空气密度;m为整车质量;Cr为滚动阻力系数;θ为坡道角度;δm为旋转质量校正系数。
1.2 电池模型
电池模型由一个电阻和可变电压源组成,电池在放电状态下的输出Vli为:
Vli=Eli-Ili·Rdch[1-e-t/(Rdch·cp)]
(3)
式中:Eli为空载电压;Ili为电池电流;Rdch为放电电阻;t为输出电压的采样时间;cp为极化电容。
电池在充电状态下的输出及剩余电量为:
Vli=Eli+Ili·Rch[1-e-t/(Rch·cp)]
(4)
(5)
式中:Rch为充电电阻;SOCi为电池初始电量;Cli为电池容量。
1.3 燃料电池模型
燃料电池作为混合动力车辆的增程器,其输出电压可用能斯特瞬时电压方程表示为:
Vfc=N(E-Vloss)
(6)
Vloss=Vom+Vcon+Vact
(7)
式中:Vfc为系统输出电压;N为单体个数;E为每个电堆的可逆电压,按式(8)计算;Vloss为燃料电池系统损耗电压;Vom为欧姆电压;Vcon为浓度电压;Vact为活化电压。
E=1.229-0.85×10-3(Tfc-298.15)+
4.308 5×10-5Tfc(lnPhyd+0.5lnPoxg)
(8)
式中:Tfc为燃料电池组的温度;Phyd为阳极侧氢气分压;Poxg为阴极侧氧气分压。
2 能量管理策略
2.1 策略制定
在不同负载需求下,若电源之间的功率分配没有得到适当管理,没有有效的能量管理系统控制设计,则可能导致系统不稳定。为此,提出一种基于模糊逻辑的能量管理单元,用于根据需求电流和电池的SOC生成参考电流(见图1)。利用MATLAB中的Fuzzy Logic工具箱对模糊控制器进行定义,采用适应性较好的三角形隶属度函数。模糊控制有2个输出,一个是电机需求电流,另一个是燃料电池输出电流。电机一方面接收燃料电池和电池提供的电流并将电能转化为机械能,此时需求电流为负;另一方面也可将制动能量转化为电能,此时电流为正。因此,需求电流范围为[-120,65] A,包括4个模糊子集,分别为{NB,NS,PS,PB};SOC范围为[0.1,0.95],包括5个模糊子集{LVS,LS,LM,LB,LVB}。考虑到燃料电池系统开启后一方面要满足电机的需求电流,另一方面多余的电流要供给电池充电,燃料电池输出电流范围为[-180,0] A,包括5个模糊子集{NVS,NS,NM,NB,NVB}。模糊控制规则见表1、图2。

图2 模糊控制规则
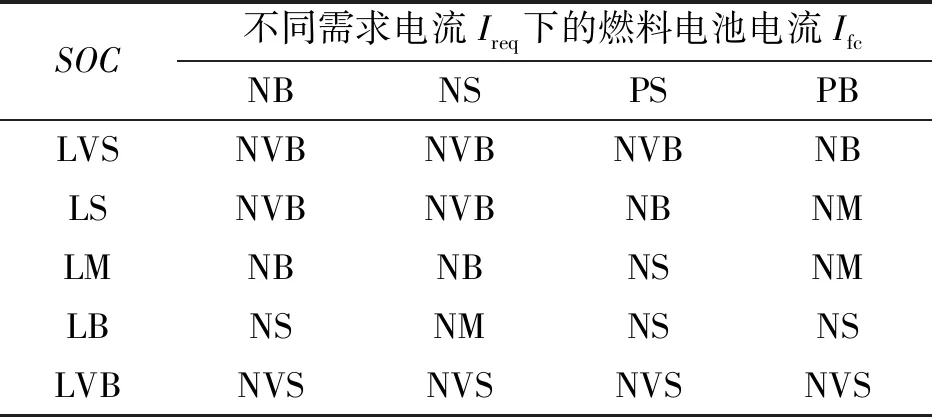
表1 模糊控制规则

Ireq为需求电流(A);Ifc为燃料电池电流(A);Ibat为电机电流(A);SOC为电池电量(%)
2.2 策略优化
模糊控制解决了燃料电池和电池输出对电流控制的问题。然而模糊规则及权重系数的设置依赖个人经验,无法达到最佳控制效果。为此,以续驶里程为优化目标对模糊控制策略进行优化,期望在相同的初始及终止条件下车辆能行驶最远距离。优化对象为模糊控制的隶属度函数,权重系数设为1。
将续驶里程作为优化函数,通过禁忌搜索算法进行迭代寻优,优化对象为双层模糊控制的隶属度函数及权重系数。优化过程如下:将各隶属度函数端点及顶点依次作为禁忌搜索算法的向量,令其为(X1,X2,X3,…);通过对整车模型进行离线仿真计算一次补充能源车辆续驶里程,根据禁忌搜索算法编写MATLAB脚本文件并不断更新(X1,X2,X3,…),达到终止条件时,对应隶属度函数分布即为最终优化结果。图3为需求电流隶属度函数优化结果。SOC及燃料电池输出电流的隶属度函数优化过程与需求电流隶属度函数优化过程相似,不再赘述。
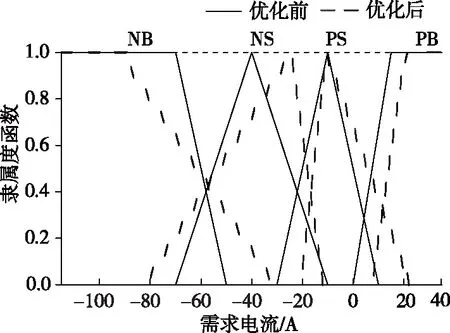
图3 需求电流隶属度函数优化结果
3 结果与讨论
在世界轻型汽车试验规程(WLTP)下进行仿真与优化,经过禁忌搜索算法优化后的续驶里程(221.5 km)相比优化前(213.3 km)提高8.2 km。图4为WLTP工况下需求电流,图5为电池SOC的变化,图6为电池电流的变化,图7为燃料电池电流的变化。图4中电流为正表示制动,电流为负表示驱动;图6中电流为正表示充电,电流为负表示放电。
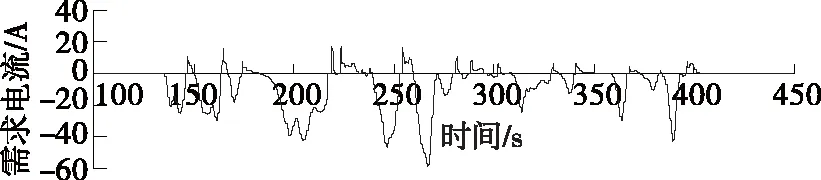
图4 需求电流的变化

图5 电池SOC的变化
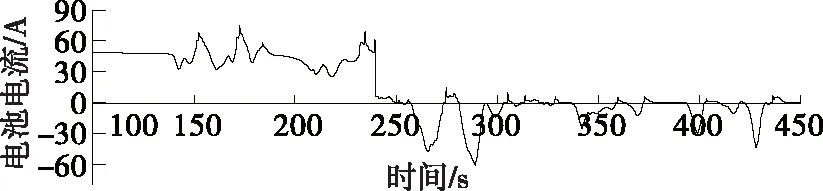
图6 电池电流的变化

图7 燃料电池电流的变化
从图4~7可看出:需求电流变化快速,但燃料电池输出电流波动较小,需求电流中的高频变化部分由电池提供或吸收,燃料电池输出平稳可有效提高其使用寿命;开始时电池SOC快速上升,到达40%时保持稳定,此时燃料电池和电池的输出电流处于平稳阶段,相较于SOC快速上升阶段,其电流变化范围减小,对保护电池及燃料电池有利。
4 结语
搭建整车模型、电池模型及燃料电池模型,设计模糊控制策略,并开发禁忌搜索算法对模糊控制中的隶属度函数进行迭代优化。仿真结果表明,所提出的控制策略可有效分配燃料电池和电池的输出电流,能提升整车续驶里程和燃料电池的使用寿命。该控制策略可行性强,可应用于实车中,同时可为整车控制器开发提供理论基础。
