后勤保障浮式码头耐波性能试验
2022-08-09陈浩东韩玉龙樊天慧
陈浩东,钟 斌,韩玉龙,樊天慧,刘 鲲*
(1.中海油海南能源有限公司,海南 海口 570105;2.华南理工大学 土木与交通学院,广东 广州 510641)
0 引 言
我国远海海域蕴含较为丰富的油气资源,其储量的70%蕴藏于深海海域。对于传统的“岸基码头→补给船舶→钻井平台”的海上作业后勤补给模式来说,随着作业距离的增大,物资供给和后勤保障等成本较高,效率较低。通过研发制造后勤保障浮式码头(简称“浮式码头”),形成“浮式码头→补给船舶→钻井平台”的物资补给和后勤保障模式,可实现在远海就近对钻井平台开展物资供补、人员倒班、安全防范和应急救援等后勤保障措施,为远海油气资源开发提供强有力的装备支撑和后勤保障。
浮式码头的耐波性能和系泊性能直接关系钻井平台的安全性和可靠性。郭京等[1]建立适合在沿海开展试验研究的大尺度遥控遥测自航船模测试系统,开展同吨级圆舭船型和深V复合船型大尺度船模在沿海风浪环境下的耐波性试验研究。刘旭等[2]以某5万t半潜船为研究对象,分别通过耐波性模型试验、实船试验和三维水动力数值模拟方法研究该船在不同海况条件下的水动力运动响应。胡晓明等[3]对船模进行耐波性试验,给出实船的最大横摇角、纵摇角、升沉幅值和船舶重心处的垂向加速度,并与稳性规范相关公式进行验算比较。莫瑞芳等[4]利用SESAM软件对某15 000 t半潜船在零航速时满载状态的耐波性进行计算和分析,并结合该船实际航行的国内近海航区对其在典型海况条件下的耐波性进行短期预报。曲鲁滨等[5]针对圆舭船型开展船型优化设计,通过对主船体和附体构型进行设计和水动力布局,经模型试验验证,有效降低该船型兴波阻力,耐波性能得到大幅提升。
浮式码头三维模型如图1所示。通过模型试验对浮式码头及其系泊系统性能进行研究,旨在与数值计算模型相互验证,以确保浮式码头耐波性能和锚泊性能满足目标海域作业需求。

图1 浮式码头三维模型
1 模型试验
1.1 水池介绍
试验在华南理工大学波浪水池完成。该水池主要尺度为30.0 m×18.0 m×1.0 m,水池造波机可产生规则或不规则长峰波,最大波高可达0.40 m;采用LabVIEW平台数据自动采集及实时分析,通过非接触式光学六自由度运动测量仪测量船模在波浪中的六自由度运动,并采用无线加速度传感器测量和验证船模的运动响应;浪高仪用于测量实时波浪;4个防水拉压力传感器用于测量锚泊张力。
1.2 浮式码头物理模型
浮式码头模型为木质船模,按照给定的型值表、主要参数、型线图和总布置图制作。船模制作满足相应的精度要求,其排水量、重心位置、纵摇和横摇惯性半径通过设置船模内压载的质量和位置进行精确调整。浮式码头主要参数如表1所示,其中:坐标原点取尾垂线、中纵剖线与水线面相交处。

表1 浮式码头主要参数
1.3 系泊系统模型
浮式码头采用由四点锚泊钢绞线组成的锚泊系统,属于张紧式锚泊,目前配备的锚索为4根镀锌钢丝绳,长为1 700 m,直径为66 mm,破断力为2 450 kN,并配备4个STEVPRIS MK6型海洋工程大抓力锚,6 000 kg。
根据试验水池水深的具体情况和等效刚度原理,在模型试验中采用等效截断锚泊模型,将钢丝绳串联弹簧,模拟实际四点锚泊工况,用于测量锚泊张力。试验模拟300 m水深,锚泊线与Ox轴夹角为30°,锚泊线长为800 m,锚泊系统预张力为1.42 N(对应原型为600 kN,为锚泊线约25%的破断载荷)。浮式码头试验锚泊布置如图2所示。

图2 浮式码头试验锚泊布置
1.4 试验工况
试验工况包括3种:静水试验工况、规则波(Regular Wave,RW)工况和不规则波(Irregular Wave,IRW)工况。
(1)静水试验工况
静水试验工况包括浮式码头模型的横摇和纵摇衰减试验。横摇和纵摇衰减试验识别的阻尼用于数值计算模型的阻尼修正。
(2)RW工况
采用周期为0.55~3.00 s(对应实际周期为4.76~25.98 s)、波高为2~3 cm(对应实际波高为1.50~2.25 m)的RW,用于测试浮式码头模型在180°首迎浪、135°首斜浪和90°横浪等3个浪向条件下的运动响应幅值算子(Response Amplitude Operator,RAO)曲线,每个浪向采用14个不同周期的RW。
(3)IRW工况
IRW的RAO试验考虑3个浪向:180°首迎浪、135°首斜浪和90°横浪。在海洋工程水池中生成的波浪传播方向固定,因此在模型试验中对各浪向的模拟通过改变船模及其锚泊系统等在水池中的布置,实现不同方向角面向波浪的作用。
采用工作目标地点不同浪向的一年一遇和五年一遇波浪工况作为试验工况,验证数值计算模型的准确性,并校核锚泊强度。3个浪向的IRW工况如表2所示。试验波面通过2~3次的自动迭代和修正可获得与目标谱吻合度高的IRW。以IRW-1为例,换算为实船的IRW-1工况波面时程曲线和试验谱与目标谱对比如图3所示。

图3 换算为实船的IRW-1工况波面时程曲线和试验谱与目标谱对比

表2 IRW工况
2 试验结果
2.1 静水衰减试验
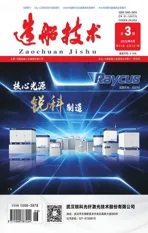
浮式码头在7.5 m吃水条件下的静水横摇和纵摇衰减时程曲线如图4所示,静水衰减试验结果如表3所示。由表3可知:(1)船模横摇和纵摇惯量调节均在专用船模调节架上完成,横摇固有周期与目标值较为一致,表明船模横摇惯量调节符合要求;(2)浮式码头的运动特性具有大水线面船舶的典型特点。

表3 浮式码头静水衰减试验结果
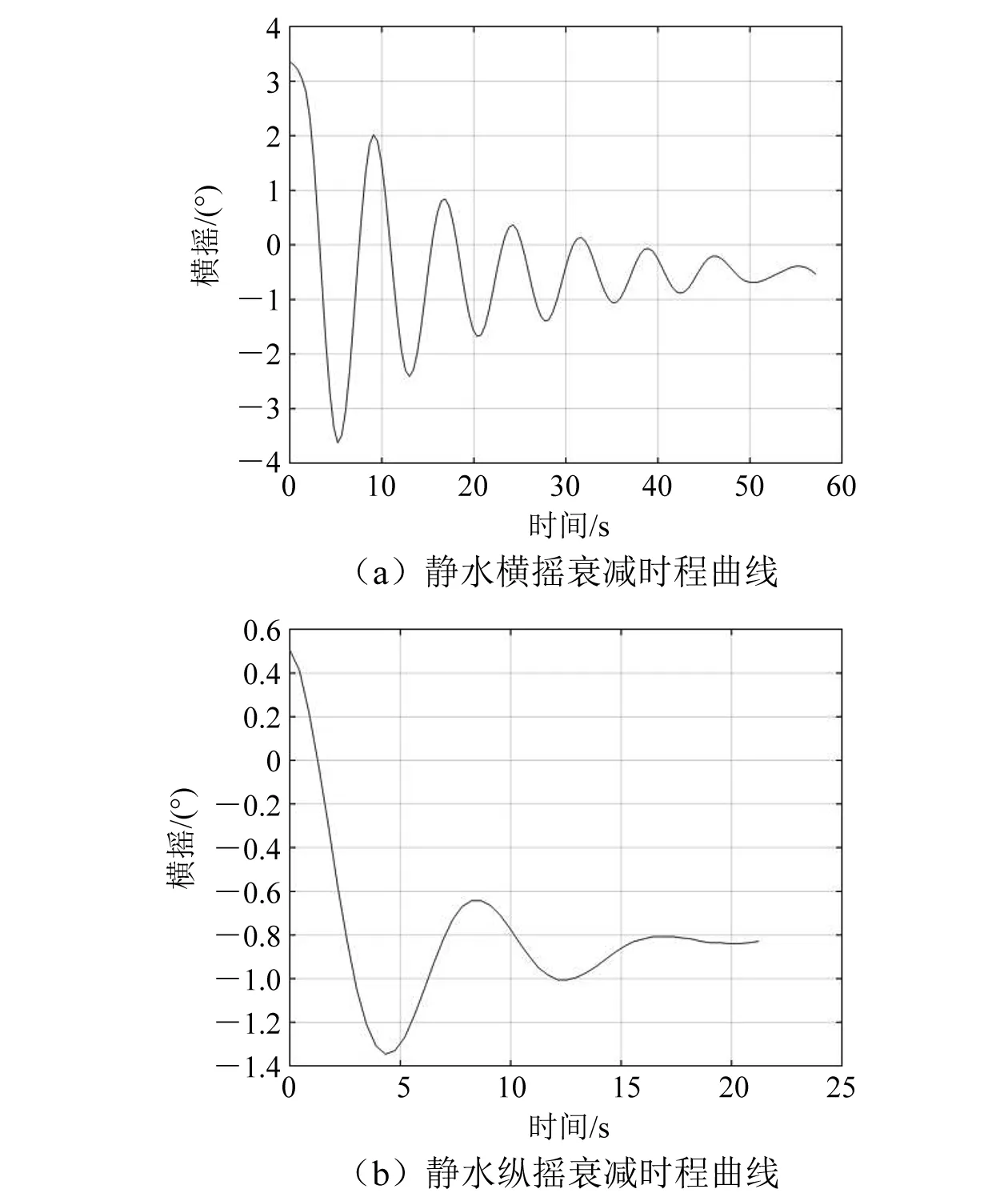
图4 浮式码头静水横摇和纵摇衰减时程曲线
2.2 RW试验
对RW试验的测量数据进行分析,得到浮式码头六自由度运动的RAO曲线,可与频域数值计算得到的RAO曲线进行对比,以校验数值计算结果。浮式码头135°首斜浪的RAO曲线如图5所示。RW试验结果表明,通过黏性阻尼修正的数值计算模型与试验结果吻合度较高,表明数值计算模型水动力分析的有效性。

图5 浮式码头135°首斜浪RAO曲线
2.3 IRW试验
根据锚泊张力数值计算与试验结果,按目前锚泊系统布置条件下,面对一年一遇的极限工作海况,锚泊系统可提供安全锚泊,并保证一定的安全冗余度。浮式码头IRW-4工况135°首斜浪六自由度运动响应时程曲线如图6所示。但面对五年一遇的极限工况,特别是在斜浪作用下,现有锚泊系统张力较大,具有破坏风险。以IRW-3工况为例,浮式码头IRW-3工况135°首斜浪运动响应和锚泊系统张力统计值如表4所示。
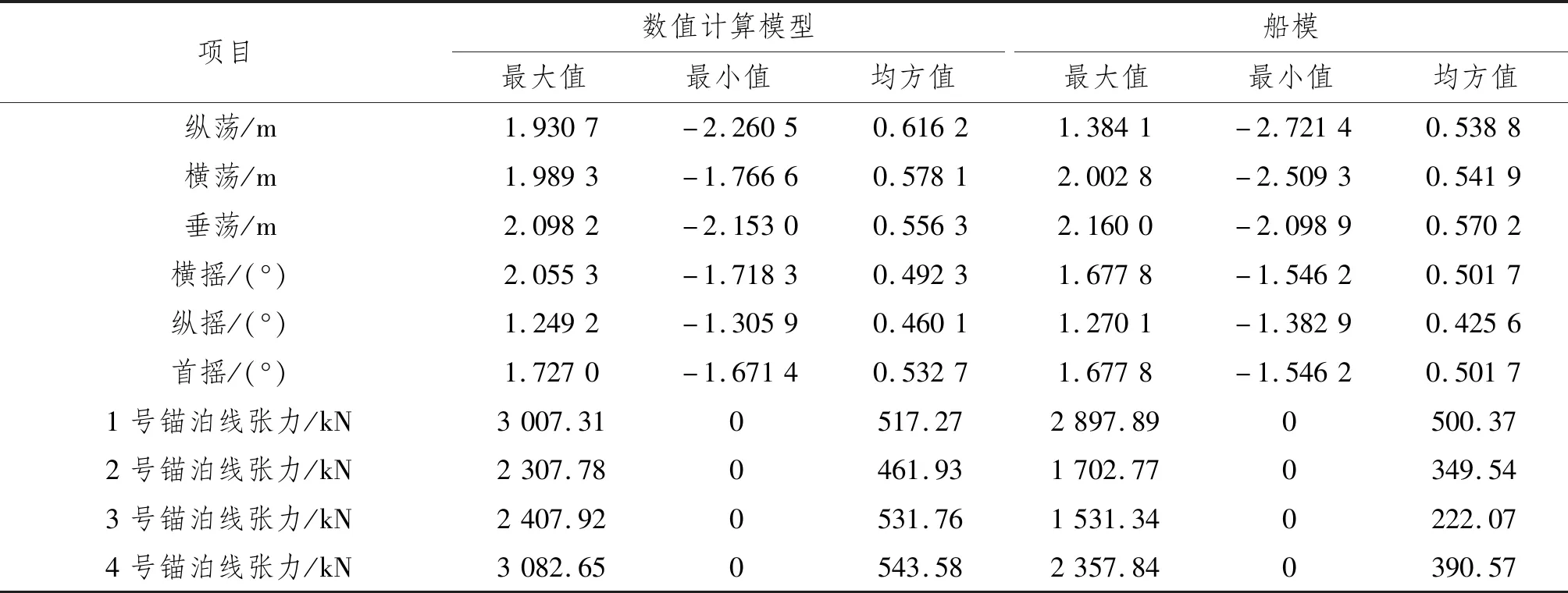
表4 浮式码头IRW-3工况135°首斜浪运动响应和锚泊系统张力统计值
图6 浮式码头IRW-4工况135°首斜浪六自由度运动响应时程曲线
3 结 语
由船模静水衰减试验得到的横摇周期和纵摇周期与设计周期接近,与船模加工的可靠性和理论设计值之间进行相互验证。通过RW试验,获得浮式码头3种浪向的运动RAO曲线,试验结果与采用横摇阻尼修正的数值计算模型结果吻合度高,验证修正的数值计算模型的有效性。根据IRW试验结果,浮式码头运动响应试验结果与数值计算模型结果吻合度较高,验证数值计算模型的有效性。IRW试验结果表明,在目前锚泊布置条件下,难以满足抵抗五年一遇的波浪工况(在首斜浪和横浪条件下),需要对锚泊系统的布置进一步优化。