基于双向长短时记忆网络模型的汽车搭铁失效故障诊断方法
2022-08-09常红梅
常红梅
(陕西理工大学 机械工程学院, 陕西 汉中 723001)
1 引言
汽车的使用量越来越多,随之产生的汽车故障也越来越多,其中汽车搭铁故障是比较常见的故障类型。为保障汽车安全性、减小汽车故障率,本文提出了基于Bi-LSTM模型的汽车搭铁失效故障诊断方法。常规LSTM(长短时记忆网络)模型的单向性,导致LSTM在数据特征提取时需要大量数据支撑,实际车辆故障情况下LSTM模型可能因为其他原因无法将数据特征提取完全,而Bi-LSTM学习方法是双向网络记忆方法,它可以从正向反向学习分析传输数据,它的计算精度比循环神经网络更高,计算速度更快,可以更广泛的使用在汽车故障诊断。为了使电路系统更加稳定,当汽车出现搭铁失效状态时及时发现并快速处理故障是对自身安全的重要保证。
目前研究的搭铁故障诊断办法有许多,如李炜等,研究的基于深度学习序贯检验故障诊断模型,通过LSTM网络建立电源车的多变量时间序列模型,进行故障诊断,该方法存在一定限制,其召回率较低。朱敏等,研究的KDE-FPBT的故障诊断模型,基于核密度估计实现实数域样本数据到故障对布尔表的转换,并采用“一对一”的投票策略完成对实测数据的故障诊断,该方法的的特征提取不够详细,细节化不够,并且AUC值相对较低。
这些方法只是定性判断,对于一些汽车诊断缺乏数据支撑,针对以上问题,本文设计基于双向长短时记忆网络模型,该模型能够及时准确的检测到车辆的异常数据的细微差距,并将数据通过Bi-LSTM模型进行精准分类,通过数据快速判断是否发生汽车搭铁故障,增加发现异常数据的准确性并及时处理,提高运行安全系数。
由于汽车车身和发动机都是金属结构,其本身就有导电能力,加上汽车电器比较多,如果每个电器都用两根线构成回路,将会使电路结构复杂。因此,其与汽车的单线制有关,是指将蓄电池和发电机正极或负极与汽车车架相联,使车架带正电或负电,从而使安装在车架上的所有汽车电气设备只需一根从电源另一极引出的导线就可构成回路。让汽车电源系统的一极与车架相联的接线制度就叫搭铁接线制(简称搭铁)。汽车搭铁如图1所示。
2.2 汽车搭铁失效故障特征提取
..基于傅里叶变换的特征提取

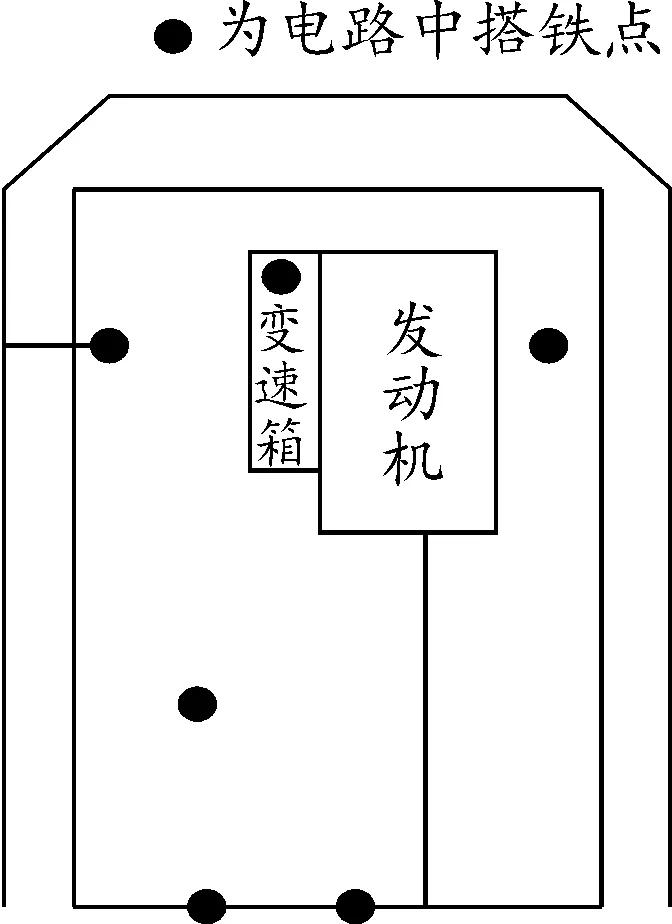
图1 汽车搭铁示意图
()通过变量代换也可用下列公式表示:
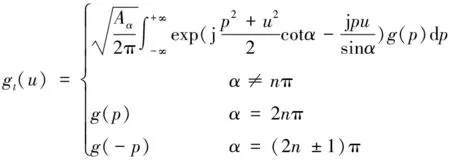
(1)
根据FrFT的性质,阶的分数阶傅里叶域的坐标空间是(,)平面上按逆时针旋转角度所得,只需逆时针转动0~π2 范围内的分析数据,值一般在0~1。
基于分形维数的特征提取
采用盒计数维数计算各阶FrFT中的分形维数(FD)具体用如下公式表示:
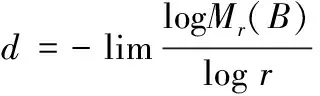
(2)
式(2)中:空间中随机非空有界子集为,在子集中的维立方体的最小数目被()覆盖,维立方体边长为,>0。-log为横坐标,log()为纵坐标,通过在坐标分布点使用二乘线性回归算法计算出直线的斜率,得到集合的盒计数维数。
..基于FrFTFD的特征提取
汽车在发生搭铁故障响应信号的微小差异性,在故障时域空间无法分辨,如果将这些信号映射到不同FrFT域内则更容易分辨,FD得到的特征数据也会随之变化。将所有原始时域数据映射到FrFT域中,得出相应的FD值,得到整个搭铁信号故障的复杂程度与特征变化数值,这样就可以诊断汽车搭铁故障的所有数据。
因为无法计算阶FrFT域内所有的FD,FrFT域内值导致()的变化过小,需要将FrFT分成多个区段,将步长为0.2的值从0变化到1所对应的信号进行FrFT,最后求得FD的方法,步骤如下:
1) 令=0;
2) 将模拟故障特征数据运用式(1)映射到阶的FrFT域;
3) 保存在阶FrFT域的故障信号利用式(3)计算出的FD;
4) 令=+01;
5) 如果值大于1,算法终止,如果不大于1,则继续进行第2步。
具体提取流程如图2所示。
2.3 基于Bi-LSTM模型的故障诊断
..长短时记忆网络(LSTM)
循环神经网络(RNN)中的一种特殊模式就是长短时记忆网络(LSTM),LSTM广泛应用于序列处理任务,通过引入记忆单元和门限机制的特殊性,解决RNN存在的梯度消失与梯度爆炸的问题。本文应用的LSTM模型的具体参数、属性指标等见表1。
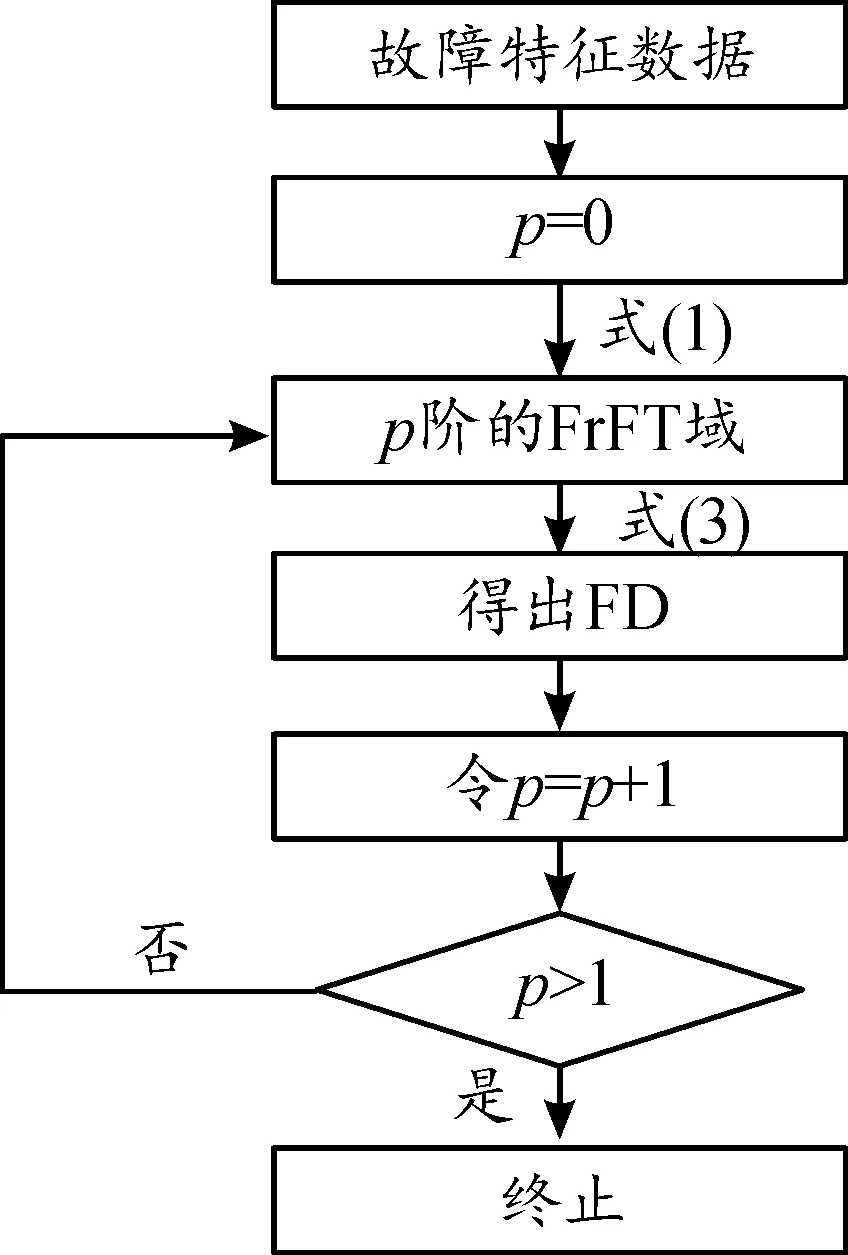
图2 特征提取流程框图
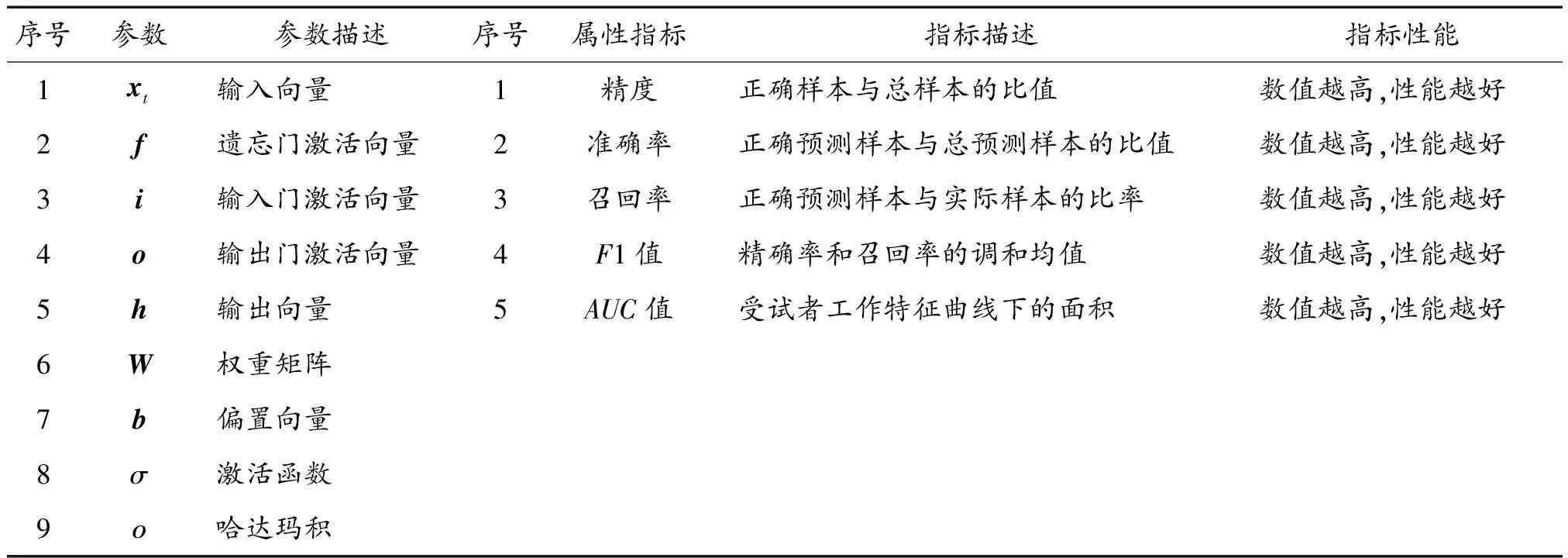
表1 LSTM模型参数和属性指标
图3表示由记忆单元(Memory cell)、输入门(Input gate)、输出门(Output gate)和遗忘门(Forget gate)4个模块单元组成的LSTM模块单元。流入和流出的记忆单元信息由3个非线性门控单元调节,记忆单元之间彼此循环连接。用下列公式表示LSTM的前向计算:
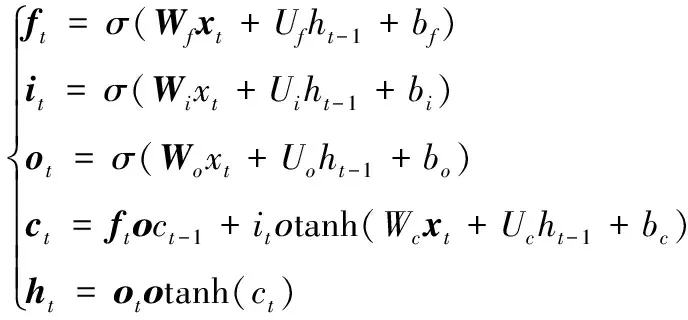
(3)
式中: 当前时段的输入向量为,遗忘门、输入门、输出门的激活向量分别是、、,LSTM单元的输出向量为,为权重矩阵,为偏置向量,是sigmod函数中的激活函数,是矩阵对应元素相乘的哈达玛积。
LSTM信息预测和输出取决于前面时刻的历史序列信息与后续时刻的信息,为了提升学习任务的性能,融合LSTM单元与双向网络,提出Bi-LSTM模型。
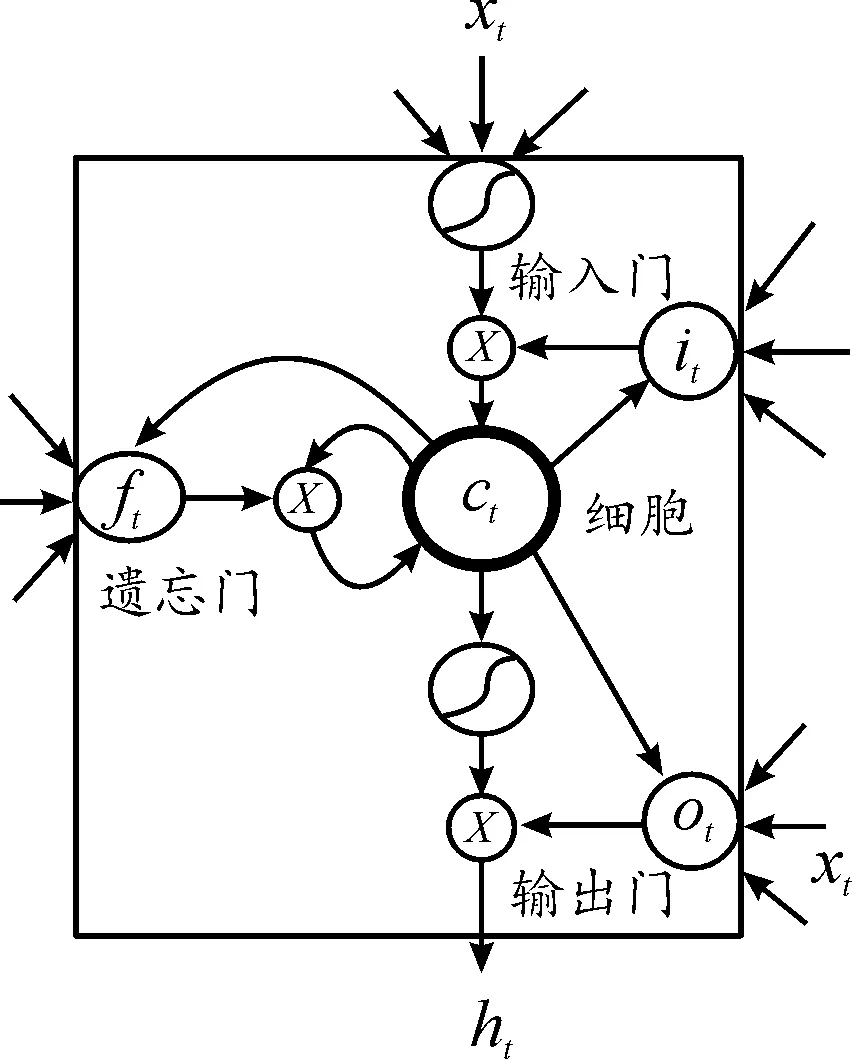
图3 LSTM模块单元示意图
..模型构建
图4表示双向LSTM(Bi-LSTM)模型,模型利用当前时刻与前后t时刻的上下文信息数据,通过正、反向LSTM分别提取汽车所有特征信息,通过分类故障与正常信息,找出异常数据,从而达到汽车故障检测的目的。Bi-LSTM模型是深度学习的一种改进版,具备深度学习的学习机制、相互转化等特点,同时具备了长短期记忆的核心性,即长期记忆和短期记忆相结合。
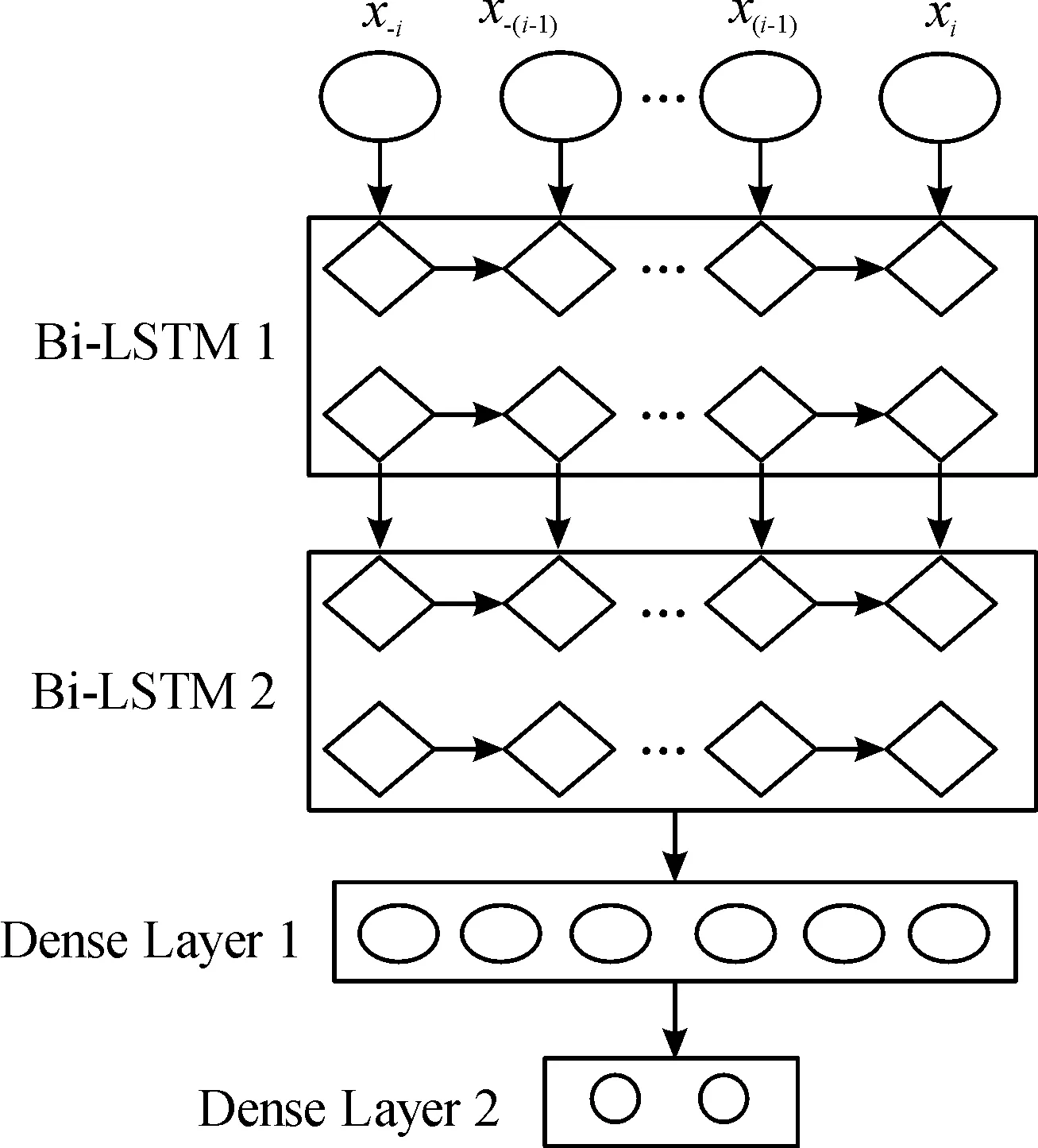
图4 双向LSTM模型框图
在模型中,每个时间段车辆数据点由表示,在时间段之前和之后的数据点用-与表示。为了确定汽车是否为故障点,需要将汽车故障数据运动特征的正常点和异常点的细微差异通过Bi-LSTM进行标记,模型经过自主学习和训练,将所有汽车故障信息通过差异性进行分类。模型算法流程算法具体步骤和流程图(图5)如下:
1) 依次读取车辆序列数据点;
2) 提取一段车辆数据序列的特征向量;
3) 将特征向量录入到预训练好的Bi-LSTM模型,判定数据点是否为常规提取数据或者为故障点;
4) 将车辆数据转化为可视数据。
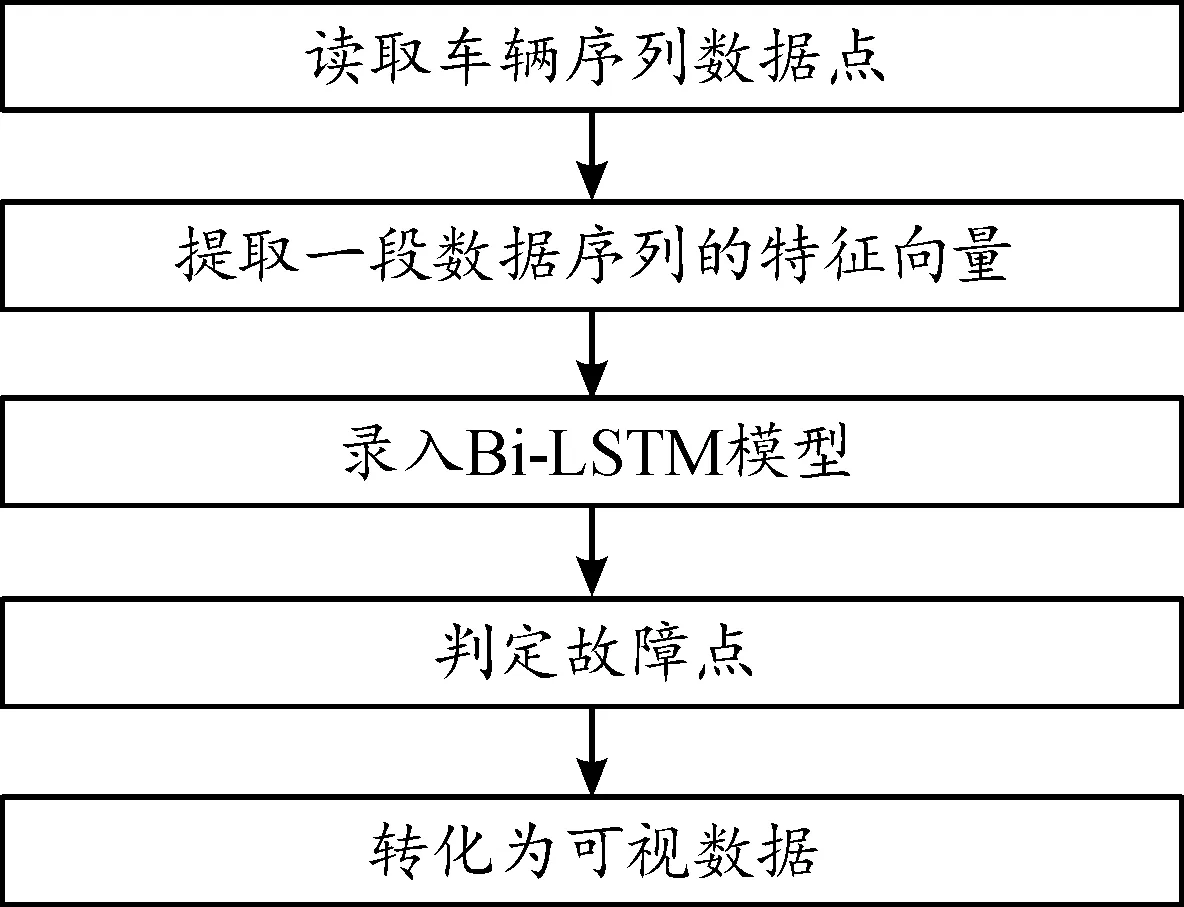
图5 模型算法流程框图
3 实验模拟
3.1 评价指标
根据计算机常规评价指标(精度,准确率,召回率,1值,值)来判定。数据计算与分类需要根据真实情况和模型预测类别组合,组成真正例和假正例,真反例和假反例。其中正确样本与总样本的比值为分类精度,正确预测样本与总预测样本的比值为准确率,正确预测样本与实际样本的比率为召回率,召回率和准确率的调和均值为1值,值是ROC曲线下的面积比,真正例率与假正例率的关系就是ROC曲线,有时ROC曲线过于接近无法准确比较模型性能,就用ROC曲线下的面积比值来表示。值越接近1,模型性能越好。下面式(4)—式(7)表示精度,准确率,召回率,1值的计算方法:
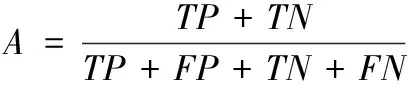
(4)
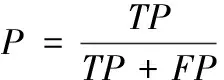
(5)
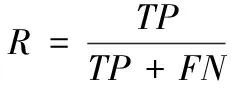
(6)
(7)
ROC中的真正例率TPR和假正例率FPR的关系公式如式(8):
(8)
3.2 实验
实验在NVIDIA GTX 1080显卡内训练本文方法的Bi-LSTM模型,模型用Pytorch框架构建,用本文方法的FrFT-FD特征提取的方法计算得到一系列故障特征向量,将特征向量使用具有优秀的双层网络性能的多层Bi-LSTM模型进行检测分类。
由于汽车搭铁原件较多,搭铁故障多种多样,选取某品牌SUV汽车的部分故障数据作为训练样本,总样本数为5 000例,4 000 例作为训练样本,进行训练分析学习,1 000 例作为实验样本,样本为发动机故障,发动机缸体对蓄电池负极电阻为0~0.1 Ω,超出此范围判定为故障,启动困难、仪表指示反常、产生异常火花等故障,其用万用表检测的正常值为0或者接近于0,将设定A、A、A、A、A作为等待诊断的典型原件,每个原件故障值比标准值增加或者减少25%,一共有10种故障代码(Q1-Q10),加上汽车正常状态A(故障代码Q0),共计11种故障状态。
设定某一时刻,多个原件同时发生故障,将汽车故障数据经本文方法的FrFT-FD分别计算得到6个分形维度数值:1.062 4,1.137 8,1.134 2,1.176 1,1207 7,1.215 6,这些数值组合就形成一个特征向量。将所有带故障的信号均进行FrFT-FD计算得到的特征向量就是所有故障模式下的特征向量。用本文方法的FrFT-FD提取11组故障模式的故障特征所得到的平均值如表2所示。
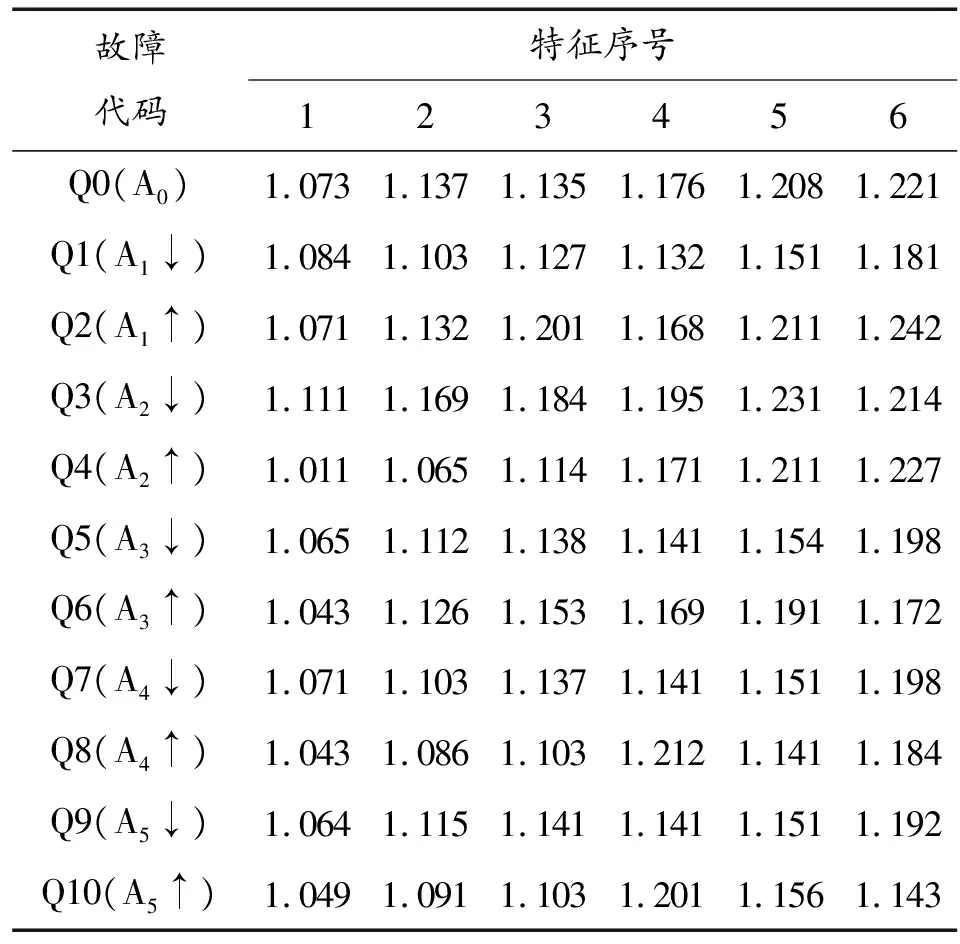
表2 经FrFT-FD计算的11组故障平均值
表2中↑与↓分别是增加或减少25%故障值的故障状态。从表2可以看出,本文方法将所有故障模式下的故障特征输入到所有FrFT域中进行FD求解,在值不大于1时,故障数据重复运算,不作输出,当值大于1时,提取特征数据,并进行输出,此时,可以更加准确的得到所有故障数据变化,避免信号的时频部分特性被忽略所导致的计算出的FD数值很相近,在时域中无法分辨现象,便于后期故障诊断顺利开展。
通过Bi-LSTM分类所得到的数据就是正常数据和异常数据,为了验证本文方法应用Bi-LSTM模型的优异性,选取文献[3]的深度学习方法、文献[4]KDE-FPBT方法和本文方法的故障诊断性能指标作图,见图6、图7。
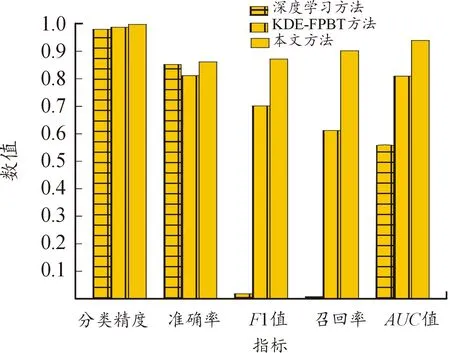
图6 不同方法故障诊断性能指标直方图
图6表示不用方法的指标对比,图7为不同方法故障诊断的ROC曲线。由图6、图7可知本文方法的故障诊断所有指标均比其他2种方法故障诊断指标数值高,说明本文方法的故障诊断性能对比其他2种对比方法强,特别是召回率和AUC值,故障诊断时如果有高召回率就可以诊断得到更多真实异常数据,召回率在故障诊断时尤为重要。在检测故障点的异常时,每一个故障点与周围正常数据点的运动特征都有较大差异,2种对比方法只使用故障点的信息,忽略周围的信息,这会使检测性能降低。深度学习方法的召回率极低,说明深度学习方法遗漏了很多故障异常点,而本文方法应用了Bi-LSTM模型,具备深度学习的特点,可以快速检测到故障异常点。
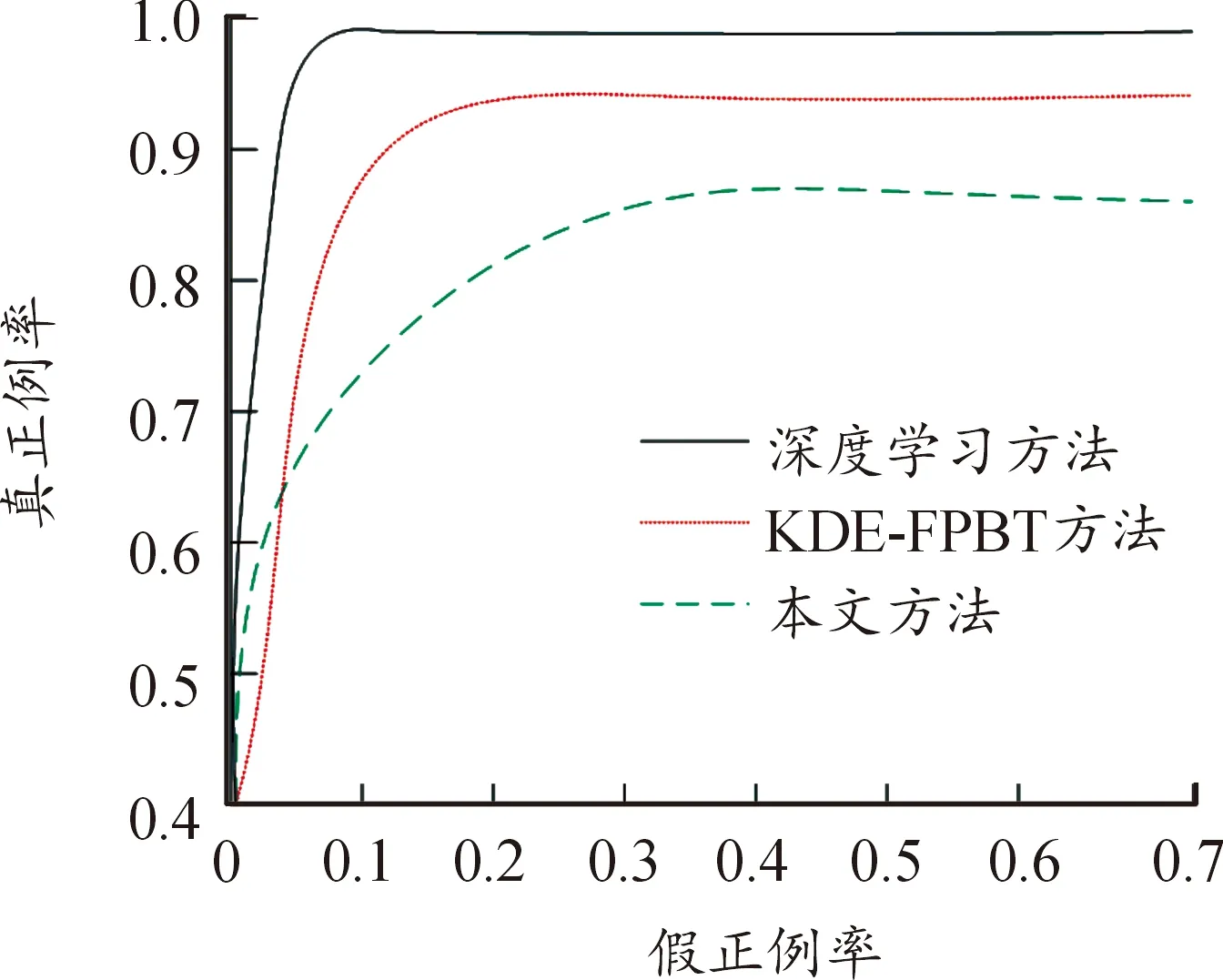
图7 不同方法故障诊断ROC曲线
设置可以引起汽车搭铁失效故障的5种原因,A搭铁点松动虚接所致;B搭铁点氧化所致;C搭铁线路有断路现象;D搭铁线路有短路现象,E连接端子腐蚀,实验模拟搭铁线路有断路现象产生导致的汽车搭铁失效故障时,统计本文方法故障诊断的后验概率,用图8描述。
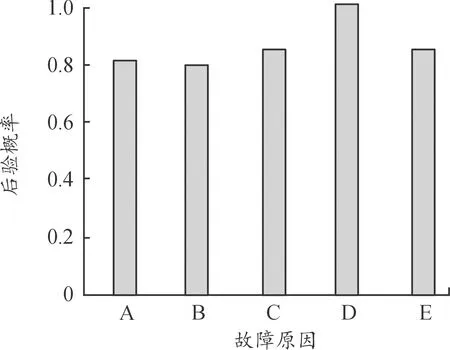
图8 本文方法故障诊断的后验概率直方图
分析图5所示的本文方法诊断各故障原因的后验概率可知,故障原因D是引发起汽车搭铁失效故障最可能发生原因,且本文方法的故障诊断结果与实际设置情况的故障一样,具备汽车搭铁失效故障诊断正确性。
进一步验证本文方法的故障诊断的有效性,验证其诊断耗时,同时与文献方法进行对比,参见图9。
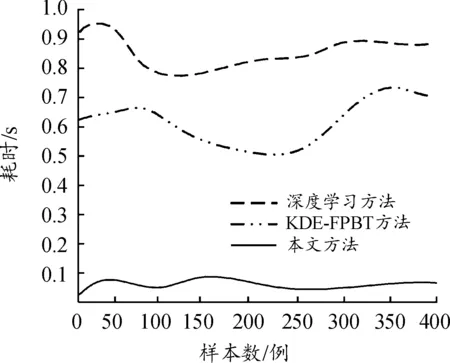
图9 不同方法故障诊断耗时曲线
根据图9可知,本文方法的故障诊断过程中的耗时均低于0.1 s,文献方法的耗时分别在0.5~0.8 s和0.75~0.95 s,与本文方法相比,耗时均高出本文方法较多,因此,本文方法能有在更短的时间内诊断出故障。
4 结论
提出了一种基于双向长短时记忆网络模型的汽车搭铁失效故障诊断方法,可以及时有效的检测车辆搭铁失效故障。通过对车辆故障数据特征进行提取与分析,判定车辆故障的细微差异,用于诊断故障高效,将本法与其他分类方法进行比较,实验证明了本方法相对于其他办法对于故障特征的精度和准确率更高,速度更快,可以更好更快速的诊断因搭铁失效产生的故障,防止车辆进一步损坏,影响人身安全。
长短时记忆网络模型需要一定的数据支撑,虽然可以提高车辆检测的准确性,但如果出现全新的故障数据需要继续更新模型学习内容,保证模型的更新率,同时在现实车辆背景环境下,可能有一些不确定因素影响数据精度,希望在以后研究中对算法优化改进。随着网络的发展和数据的累计,该方法的使用将会更加便捷,更加广泛。
