电力机车运行工况对车网系统低频振荡的影响 规律研究
2022-08-06孟昭斐胡海涛
孟昭斐 胡海涛 周 毅
(1. 西南交通大学电气工程学院 成都 611756; 2. 四川大学电气工程学院 成都 610041)
1 引言
随着电气化铁路的推广,我国高速铁路发展迅速,“四纵四横”高铁网已经建成运营,“八纵八横”高铁网正在不断延展。CRH系列与HXD系列等多种型号的动车组被大量投入使用。这也意味着大量电力电子变换器接入牵引供电系统,导致各种车网电气耦合问题日益突出,尤其是多台机车同时升弓接入牵引网引起的车网耦合低频振荡现象频繁发生[1]。车网耦合低频振荡现象主要表现为在供电臂下的同一位置处多台机车同时升弓整备时,牵引网电压、电流,牵引变压器二次电压、电流及中间直流电压会发生频率10 Hz以内的低频振荡[2]。电压、电流波动较大会导致机车牵引封锁。表1为近年来国内铁路系统发生低频振荡的实际案例[3]。图1为徐州机务段8辆HXD2B型机车均处于升弓整备工况时,车载牵引变压器原边电压、原边电流实测波形图[4]。
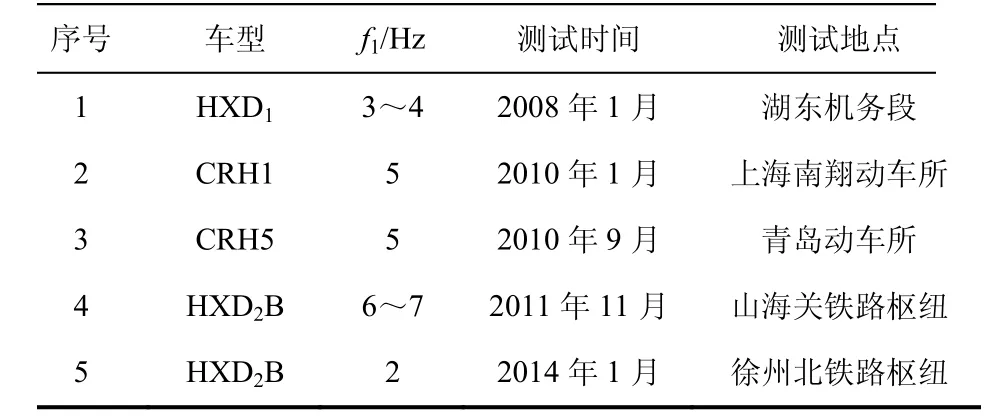
表1 国内发生低频振荡的实际案例
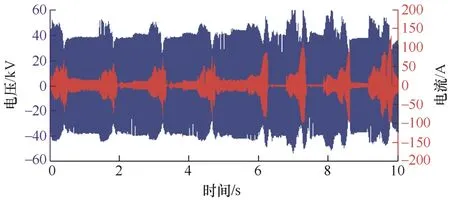
图1 低频振荡网压网流波形图
车网系统低频振荡现象已经得到国内外大批学者的重视和研究,主要的研究方法包含:时域仿真分析、特征值分析和频域建模分析。对于车网模型,大部分文献主要对CRH3、CRH5、HXD2B三种车型进行建模分析,其中CRH5采用dq解耦控制方法进行建模[5-6],CRH3和HXD2B型机车采用瞬态电流控制方法进行建模[7-9]。由于交流系统不存在直流稳态运行点,dq阻抗建模方法可以把时变的交流量变为直流量,从而在直流运行点进行线性化得到小信号平均模型[10-11]。由于系统阻抗模型建立在dq坐标系下,为多输入多输出(Multiple inputs, multiple outputs,MIMO)系统,因此,多采用广义Nyquist稳定性判据和禁域判据等[12-14]。
已有研究表明,车网系统的低频振荡现象是由于牵引网和机车间的电气量参数不匹配造成的[15]。但现有研究仅考虑了整备机车的影响,文献[1]也仅是通过定性分析说明了大功率运行机车并联会降低机车等效阻抗不利于系统稳定,并未做具体分析。考虑到车网系统发生低频振荡时,同一牵引供电臂下既有整备机车又可能存在运行机车,需要分析运行机车对车网系统低频振荡的影响规律。
因此,本文建立了整备机车和运行机车不同工况下的阻抗模型,采用阻抗比判据研究了运行机车处于不同运行状态和控制系统采用不同控制参数时对车网系统稳定性的影响规律,并通过仿真模型验证了理论分析的正确性。
2 车网系统模型建立
车网系统低频稳定性的研究主要采用基于阻抗的方法,将车网系统视作为一个级联系统,分别建立牵引网输出阻抗模型及列车输入阻抗模型并进行分析[16-17]。机车的电路拓扑及控制结构如图2所示,控制结构采用电压电流双闭环控制策略,其中R为滤波电阻,L为滤波电感,Cd为直流侧电容,RL为负载电阻。
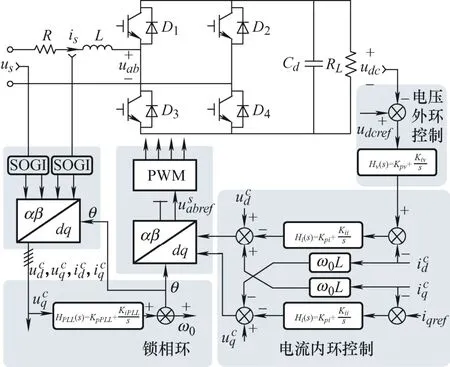
图2 机车电路拓扑图
机车系统中网侧电压电流的实际dq分量分别为网侧电压经SOGI得到系统虚拟dq分量,系统虚拟dq分量经Park变换得控制系统电压分量SOGI的传递函数,通过卷积运算电压转换关系如下
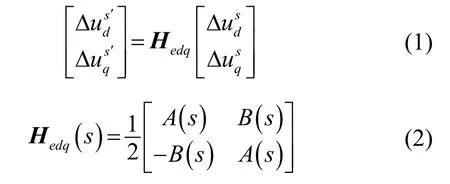
同理可得电流转换关系式如下
经过Park变换后相位角会存在误差 Δθ=θ-θ1,通过PLL控制结构可得
由此可得系统变量和控制变量间关系式如下
根据电流环控制框图和PWM调制可得
根据功率守恒可得直流侧电压和交流侧电压电流之间的关系如下
经过电压环PI控制后可得d通道电流的指令值,主电路小信号表达式如下

联立式(1)~(11)可以得出
式中,Zt(s)为机车阻抗,其表达式如下
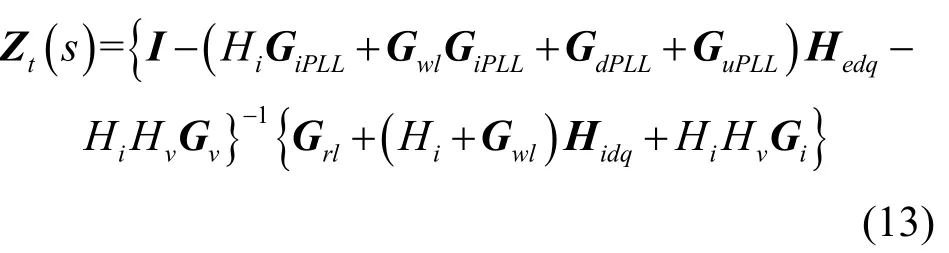
牵引网侧阻抗主要等效为阻抗元件,其在dq域的阻抗模型如式(13)所示,其中sR和sL为牵引网侧等效电阻和电感。

将机车在dq域的阻抗模型通过公式转换为序阻抗模型如下所示[18]

牵引网侧序阻抗模型如下

同理,建立运行机车的序阻抗模型。由于运行机车处于大功率运行状态建立的序阻抗模型不是对角占优,直接通过主对角线元素进行稳定性分析会导致较大误差。考虑到机车侧与牵引网侧的耦合效应,可将序阻抗模型转换成单输入单输出(Single input, single output,SISO)阻抗模型[19]。
由式(15)和式(16)可得机车和牵引网侧序阻抗表达式,则机车和牵引网侧序阻抗模型应满足如下电路关系式
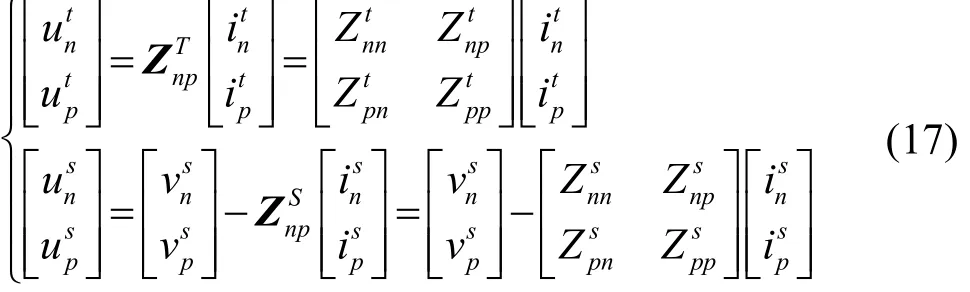
若要将序阻抗变为SISO阻抗模型,则SISO阻抗模型应满足如下关系式
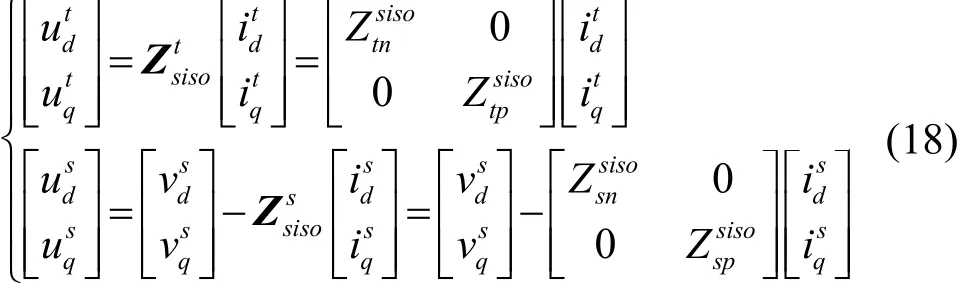
将式(17)和式(18)联立求解可得如下关系式
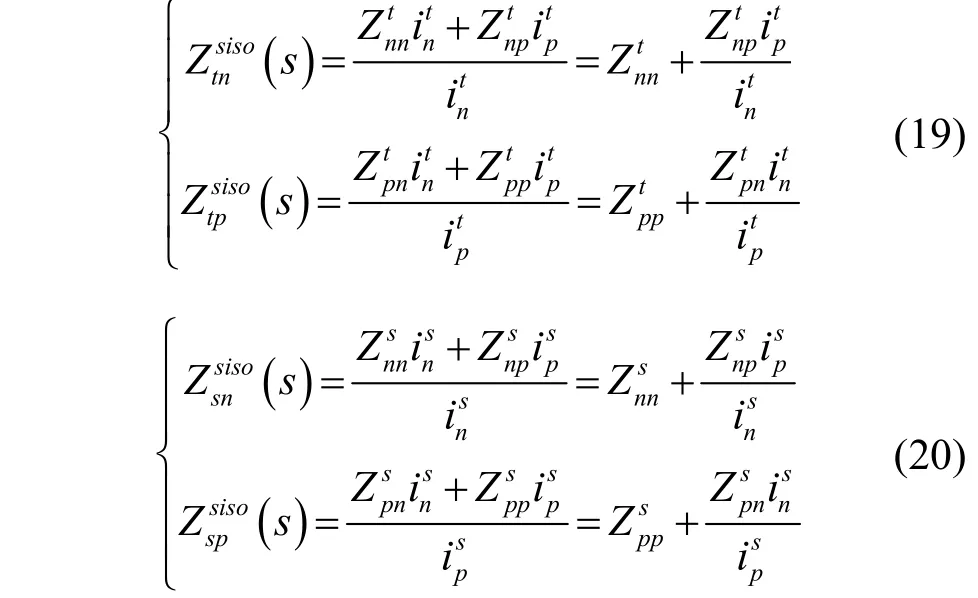
由式(19)和式(20)中可以看出,若要求得SISO阻抗各元素表达式,需要求得机车和牵引网侧序阻抗的电流比值。可通过将电路模型分解为n轴和p轴等效电路,在n轴等效电路中注入扰动电压来求得电流比值,如图3所示。
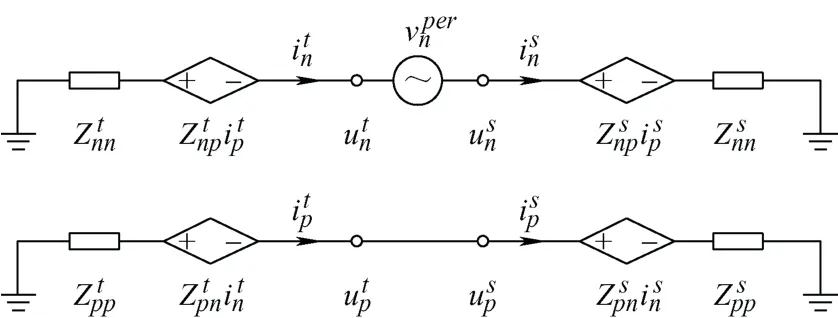
图3 n轴分量中注入电压扰动等效电路图
根据图3可求得电流比值如式(21)所示

通过将电流比值代入式(19)和式(20)可求得机车和牵引网侧SISO阻抗表达式如下
其中
当运行机车处于制动状态时,机车侧的电路拓扑与整备机车不同,直流侧由负载电阻变为直流电压源并通过机车变流器向牵引网侧回馈功率。制动机车模型采用如图4所示电路等效。根据功率守恒原理建立电路稳态关系式如下所示
由此可得小信号模型关系式
再根据文献[16]、式(13)、式(14)、式(22)和式(23)得到运行机车在制动状态下的阻抗模型。
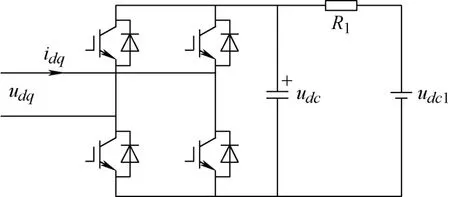
图4 制动机车等效电路拓扑图
为验证阻抗模型建立的准确性,通过扫频法绘制了制动机车的仿真模型,并与理论模型的bode图进行比较,如图5所示。从图5可以看出,理论模型和仿真模型bode图在低频范围内吻合度较好,证明了制动机车阻抗模型建立较准确。
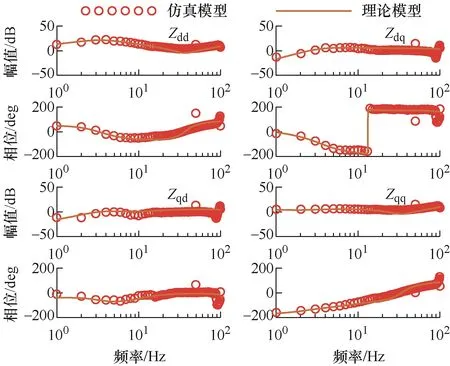
图5 制动机车理论模型和仿真模型bode图
3 运行机车不同工况下阻抗模型分析
3.1 运行机车处于大功率运行状态时
根据机车侧SISO阻抗模型,分别绘制单台整备机车(机车整备状态,负载电阻为1 000 Ω)和单台大功率运行机车(运行机车半载状态,负载电阻为5.5 Ω)的阻抗bode图如图6所示。从图6可以看出,大功率运行机车的阻抗虽然幅值较小,但其相位在大于-90°的范围内,说明运行机车在大功率运行状态下时可以提供正电阻。通过与整备机车的阻抗bode图比较可知,机车功率的增加主要影响机车阻抗实部。
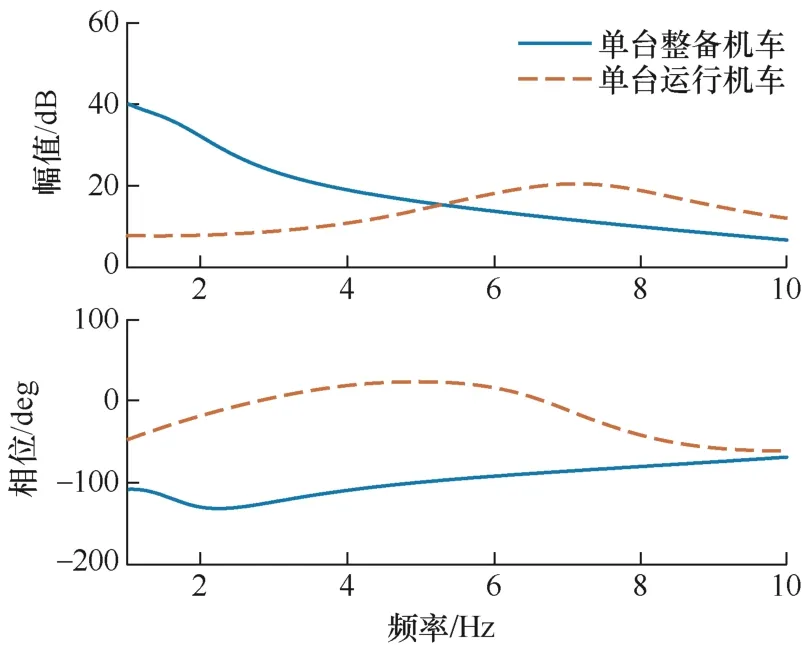
图6 单车阻抗bode图
图7为大功率运行机车不同功率时的阻抗实部图。当机车负载电阻从1 000 Ω(运行机车低功率)减小到20 Ω时,对应机车阻抗负电阻呈现减小趋势;当大功率运行机车的负载电阻减小到20 Ω时,阻抗实部变为正数,负电阻变为正电阻。图8为大功率运行机车负载电阻从20 Ω减小到5.5 Ω时对应的阻抗实部值。随着负载电阻的减小,机车阻抗不仅提供正电阻,还在一定的低频范围提供较大的正电阻(波形峰值)。
由上述分析可知,运行机车在大功率运行状态下通过改变阻抗相位,将阻抗相位由整备机车状态下的相位角小于-90°变为大于-90°,这也就意味着阻抗实部由负数变为正数。低频振荡的产生是由于系统中的负电阻导致的[18],因此,当大功率运行机车与整备机车在同一牵引供电臂下时,可通过大功率运行机车的正电阻来抵消机车侧的负电阻状况,抑制低频振荡现象。
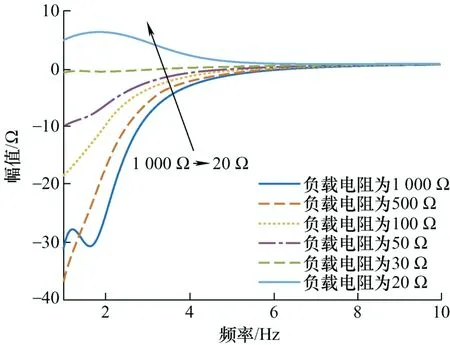
图7 机车负载电阻从1 000 Ω到20 Ω时阻抗实部图
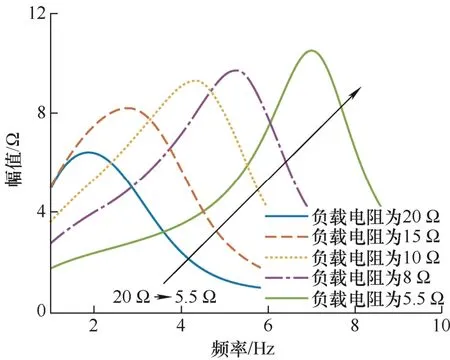
图8 机车负载电阻从20 Ω到5.5 Ω时阻抗实部图
3.2 运行机车处于制动状态时
分别绘制单台整备机车和单台制动机车的阻抗bode图如图9所示。从图9可以看出,制动机车和整备机车在低频范围内的阻抗幅值差距不大,但制动机车的阻抗相位在2 Hz附近就进入了大于-90°的范围内,说明运行机车的制动状态在低频范围内也可以提供一定的正电阻值。

图9 机车阻抗bode图
图10为运行机车不同制动功率下的阻抗实部图,箭头方向表示机车制动功率的增大。从图10可以看出,随着运行机车制动状态下制动功率的增加,机车阻抗实部由负变正,由负电阻变为正电阻。进一步说明运行机车在制动状态下功率的增加可以为系统提供正电阻值,抑制低频振荡。
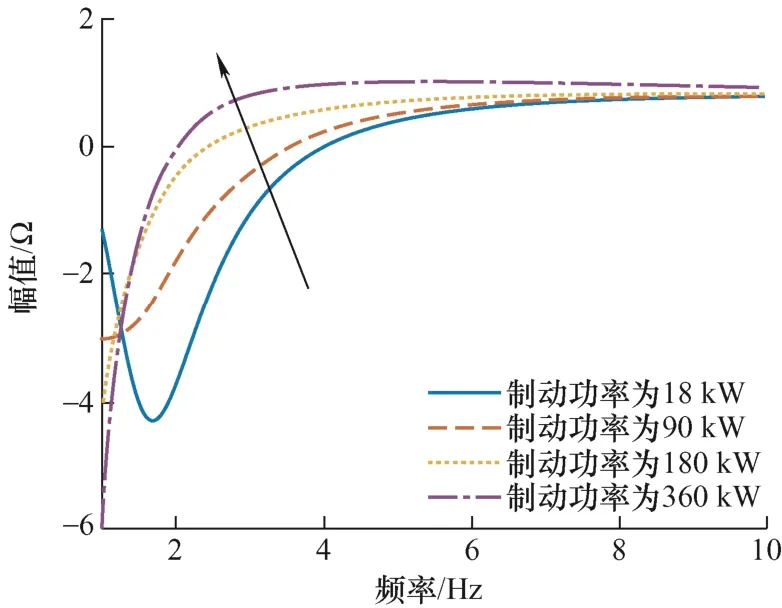
图10 制动机车制动功率增加时阻抗实部图
4 运行机车不同工况对车网系统的影响研究
运行机车与整备机车同为负载,可将其等效成阻抗模型,牵引网侧等效为戴维南等效电路,得到如图11所示电路等效图,其中tlZ为整备机车之间的线路阻抗。
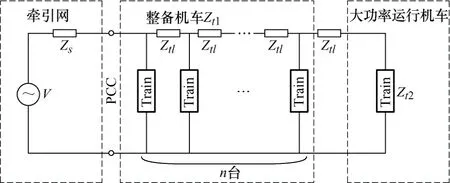
图11 含大功率运行机车的车网系统等效图
图12为有无车间线路阻抗时的整备机车侧阻抗bode图。从图12可以看出,线路阻抗的存在仅对机车侧阻抗的高频范围存在影响,在低频范围内两者曲线基本吻合。因此,建立机车侧阻抗模型时,可将车间的线路阻抗忽略。

图12 有无车间线路阻抗时机车侧阻抗bode图
将整备机车阻抗与运行机车阻抗进行并联,得到如图13所示的源-荷等效模型。
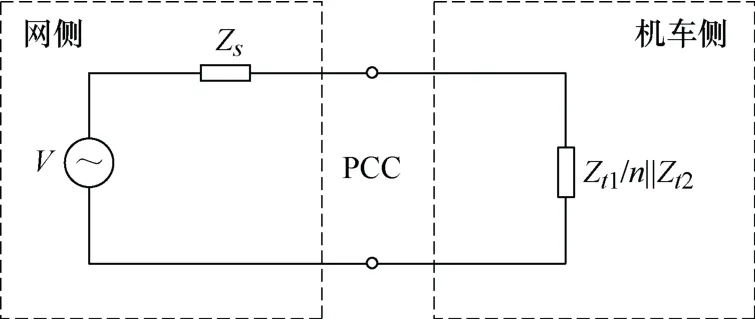
图13 源-荷等效模型
根据源-荷等效模型,通过阻抗比判据分析大功率运行机车对车网系统低频稳定性的影响规律。阻抗比如式(26)所示

为得到阻抗比的幅值和相位信息,令式(26)中的ω=js,得

若相角裕度(Phase margins, PM)是正的,则车网系统为稳定状态。

式中,fω为幅穿频率。
由于网侧阻抗是无源的,其相角始终在±90°之间,而多台整备机车的并联会使机车侧阻抗存在负电阻,导致其相角超出±90°范围,使PM小于0,系统出现不稳定现象。运行机车可以提供正电阻来抵消机车侧的负电阻,使机车侧阻抗相角保持在±90°范围内,从而保持系统稳定。
4.1 运行机车处于大功率运行状态时
图14分别绘制了单台整备机车、9台整备机车和9台整备机车与1台大功率运行机车三种情况下的SISO阻抗模型的bode图。从图14可以看出,当整备机车数量由1台增加到9台时,机车阻抗相角变化较小,主要是阻抗幅值逐渐减小;而加入大功率运行机车后,机车阻抗幅值变化较小,主要是通过增大相角来改善系统稳定性,相位角度与-90°的交点由原先的大于6 Hz变为5 Hz左右。相位角变化说明了大功率运行机车为机车侧阻抗提供了正电阻。
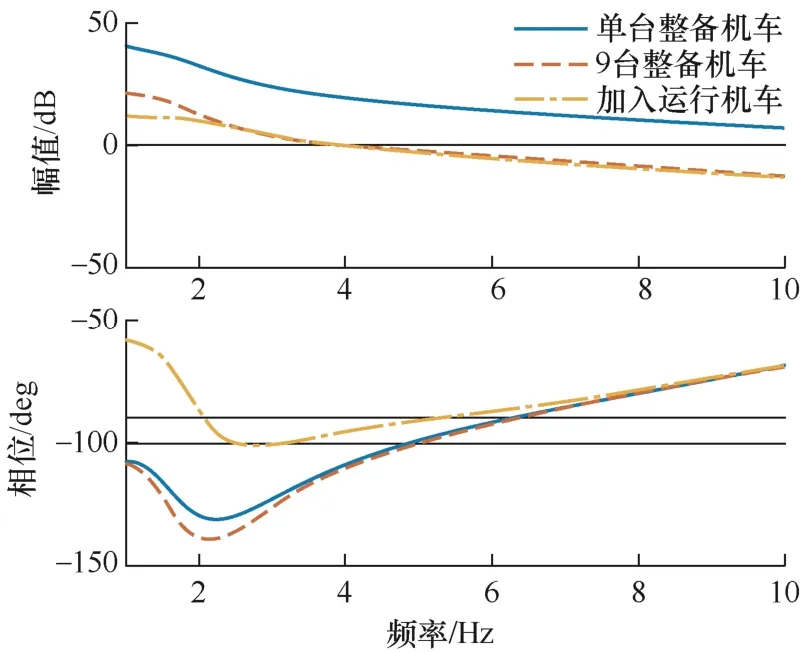
图14 不同机车情况下SISO阻抗模型的bode图
当机车侧整备机车数量为8台和9台时,系统阻抗比bode图如图15所示。从图15可以看出,当整备机车为8台时,系统阻抗比的幅穿频率为6.57 Hz,6.57 Hz处对应的相位为178.6°,PM>0,系统处于稳定状态。当整备机车数量为9台时,系统阻抗比的幅穿频率为6.08 Hz,而6.08 Hz处对应的阻抗相位为181.8°,PM<0,系统处于不稳定状态。
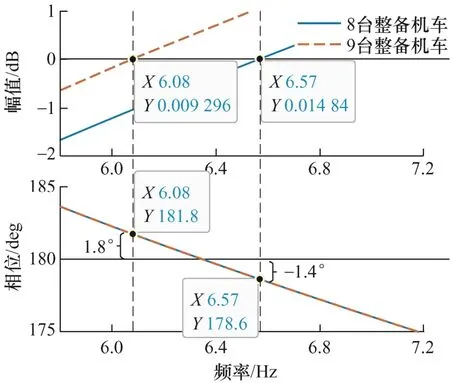
图15 8台和9台整备机车时系统阻抗比bode图
当考虑大功率运行机车时绘制相应的阻抗比bode图如图16所示。可以看出,阻抗比幅穿频率从6.08 Hz变为6.01 Hz,对应的相位角从181.8°变为177°,PM>0,系统变为稳定运行状态。由以上分析可得,当多台整备机车升弓整备发生低频振荡现象时,大功率运行机车对系统低频振荡现象具有抑制效果。
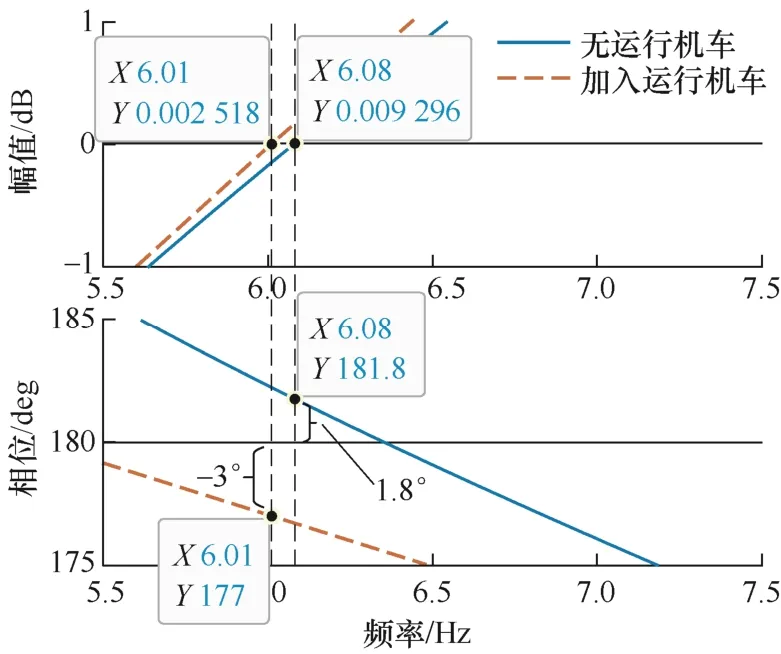
图16 大功率运行机车加入前后系统阻抗比bode图
分别改变大功率运行机车控制部分的电流环、电压环和锁相环(Phase locked loop,PLL)带宽参数,绘制如图17所示车网系统闭环传递函数随控制带宽变化趋势图。从图17a中可以看出,随着电流环带宽的增加,主导极点出现在s平面的右半平面,系统稳定性降低;图17b为改变电压环带宽时系统闭环传递函数根轨迹图,其主导极点的变化规律与电流环带宽增加时的规律相同,均逐渐趋向于s平面的右半平面;图17c为PLL带宽从10 Hz增加到40 Hz时的变化规律,从图17可以看出,PLL带宽从10 Hz增加到40 Hz时系统中闭环传递函数的主导极点均处于s平面的左半平面,且随着带宽的增加,主导极点趋向于虚轴的速度变慢,系统一直处于稳定状态,因此PLL带宽对系统稳定性影响较小。
同时,由图17可知,当电流环带宽增加一倍变为100 Hz时,主导极点出现在s平面的右半平面,且对应的实轴坐标大于0.5;当电压环带宽由4 Hz增加到9 Hz时,主导极点出现在s平面的右半平面,但其对应的实轴坐标在0.4附近,向s右半平面的趋向速度小于电流环。由此可得,在车网系统低频振荡影响中,电流环带宽参数的敏感度要大于电压环带宽参数。
综上可知,大功率运行机车电流环带宽的减小和电压环带宽的减小都会使系统稳定性增强;PLL带宽的改变对系统稳定性影响较小。
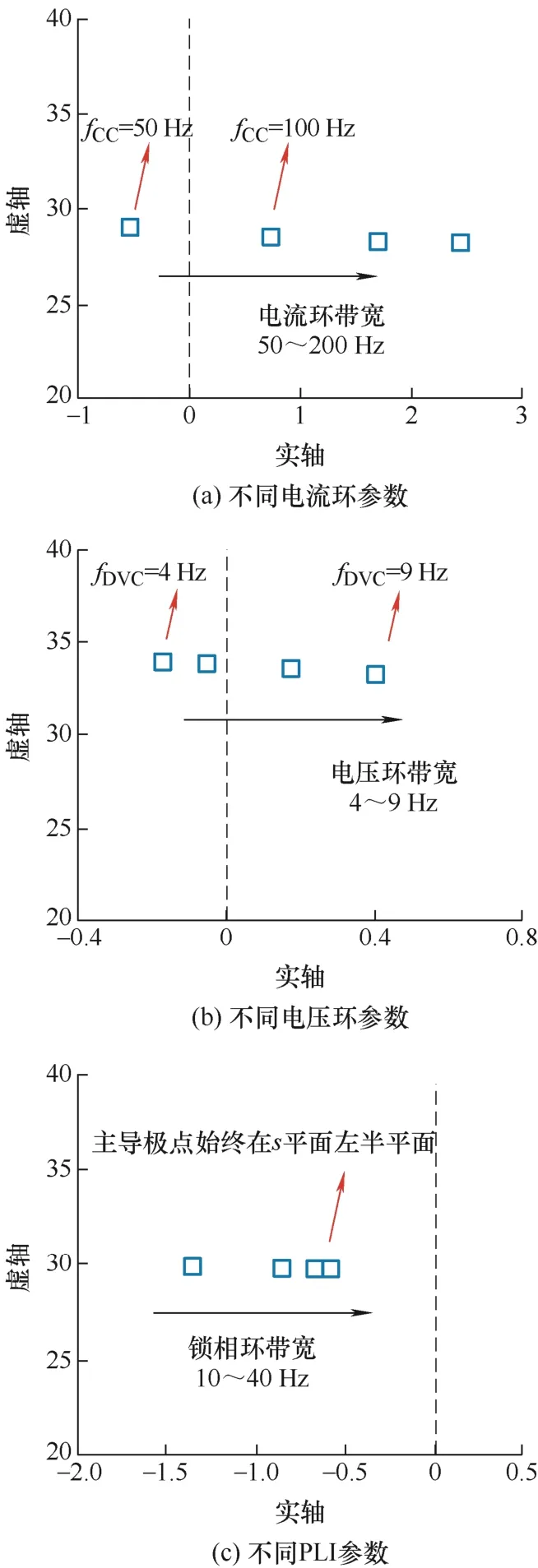
图17 不同控制参数时车网系统闭环传递函数根轨迹图
4.2 运行机车处于制动状态时
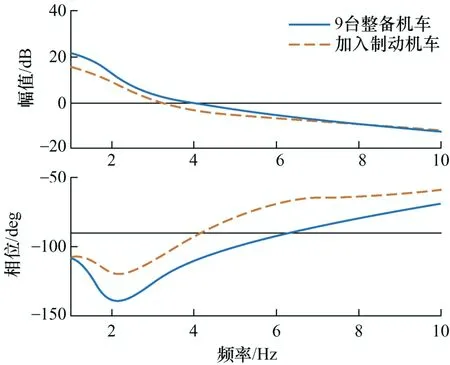
图18 加入制动机车前后机车阻抗模型bode图
如图18所示,分别绘制了9台整备机车和9台整备机车与1台制动机车两种情况下的SISO阻抗模型bode图。当加入制动机车后,机车阻抗的幅 值变化较小,相位穿过-90°对应的频率从6 Hz降为4 Hz,在低频范围内对应的正阻抗区域变大,说明制动机车可通过改变相位角来为系统提供正电阻改善系统稳定性。
同时绘制考虑制动机车时的阻抗比bode图如图19所示,制动机车的存在会使车网系统阻抗比的幅穿频率由6.08 Hz变为5.20 Hz,对应的相位角从181.8°变为166.3°,PM>0,系统变为稳定运行状态。
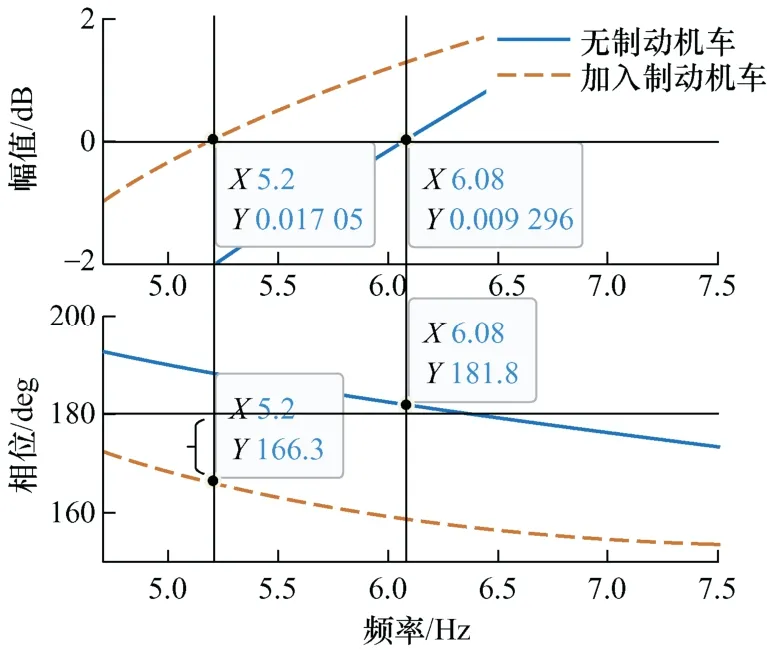
图19 制动机车加入前后系统阻抗比bode图
通过改变制动机车不同控制环参数研究控制参数对车网系统低频振荡的影响规律,绘制车网系统闭环传递函数根轨迹图如图20所示。从图20a中可以看出,电流环带宽的增加会导致系统主导极点转移到s平面的右半平面,降低系统稳定性,使系统出现低频振荡现象;图20b为电压环带宽变化时对系统稳定性的影响规律,同样,降低电压环带宽可以使系统主导极点转移到s平面的左半平面,从而提高系统稳定性;图20c为PLL带宽从5 Hz增加到30 Hz时的变化规律,从图中可以看出,PLL带宽在变化过程中,系统主导极点始终处于s平面的左半平面,且其轨迹变化较小。
同时,对比图20a和图20b,同样增大一倍电流环带宽和电压环带宽。当电流环带宽变为30 Hz后,主导极点对应的实轴坐标在0.1附近;电压环带宽变为18 Hz后,主导极点对应的实轴坐标接近于0.4,说明在车网系统低频振荡的影响中,电压环带宽参数的敏感度要大于电流环带宽参数。
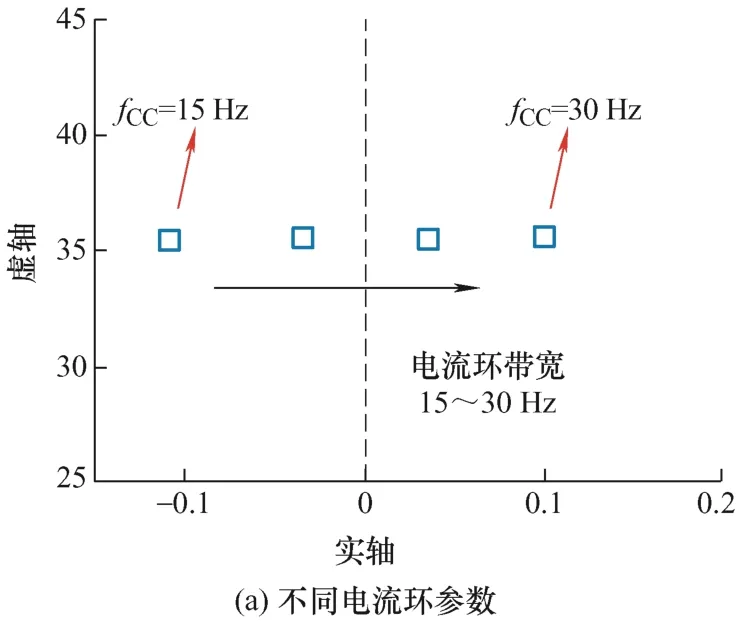
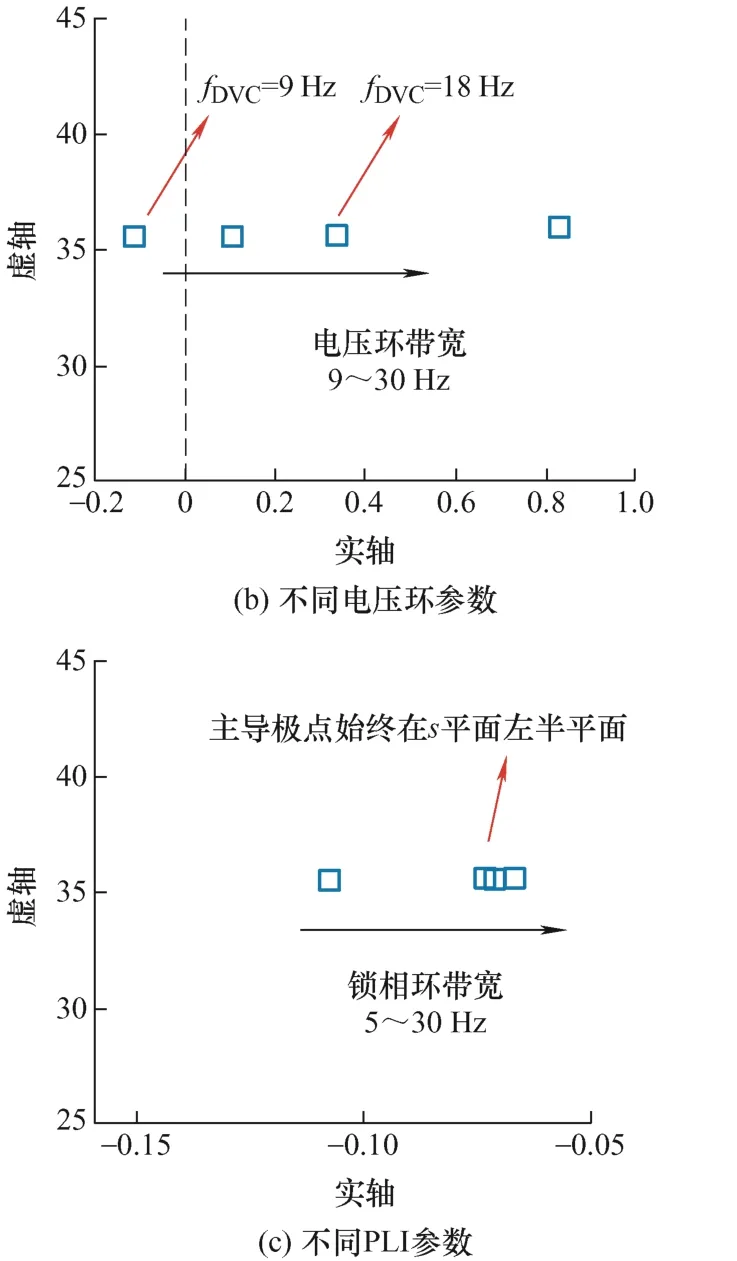
综上可知,运行机车处于制动工况时可以抑制车网系统低频振荡,且制动机车电流环带宽的减小和电压环带宽的减小都会使系统稳定性增强;而PLL带宽的变化对系统稳定性影响较小。
5 仿真模型验证
在Matlab/Simulink软件中搭建整备机车、运行机车和牵引网的仿真模型,如图21所示。分别验证了运行机车不同工况下及不同电流环带宽对车网系统的影响规律。仿真模型参数如表2所示。
车网系统中运行机车处于大功率运行状态时的仿真波形图如图22所示。前3 s为9台整备机车运行情况,电压电流呈现低频振荡,3 s后加入大功率运行机车。从图22a可以看出,当大功率运行机车直流侧负载电阻为20 Ω时,加入大功率运行机车后车网系统仍然处于低频振荡状态,系统未达到稳定状态。当直流侧负载电阻变为5.5 Ω时,加入大功率运行机车后车网系统开始稳定运行,低频振荡现象被抑制。由此可得大功率运行机车功率的增加对低频振荡有抑制作用。
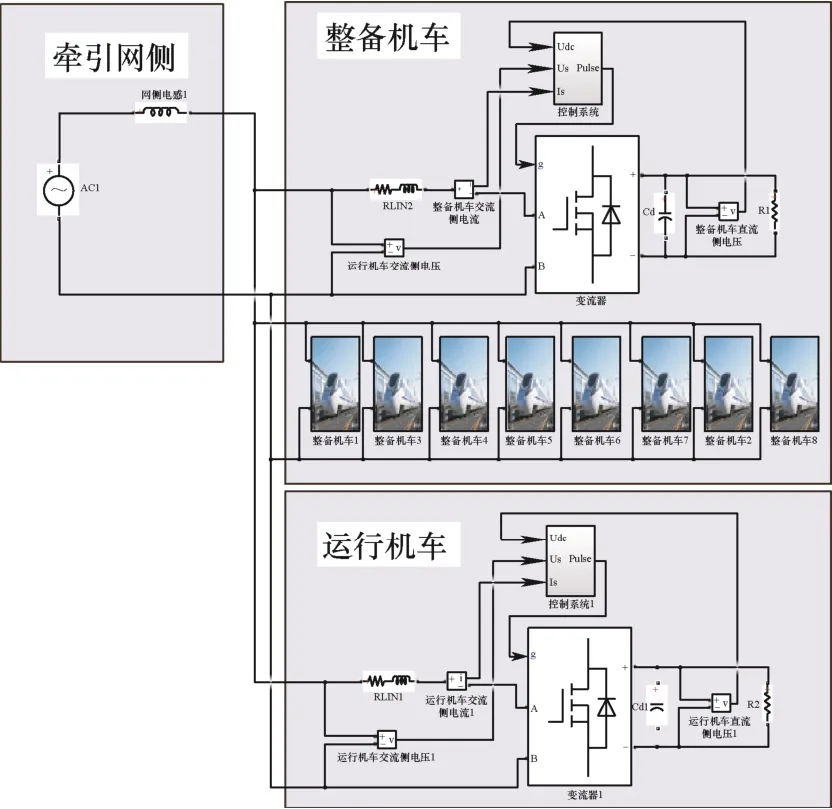
图21 车网系统仿真模型
表2 仿真模型参数
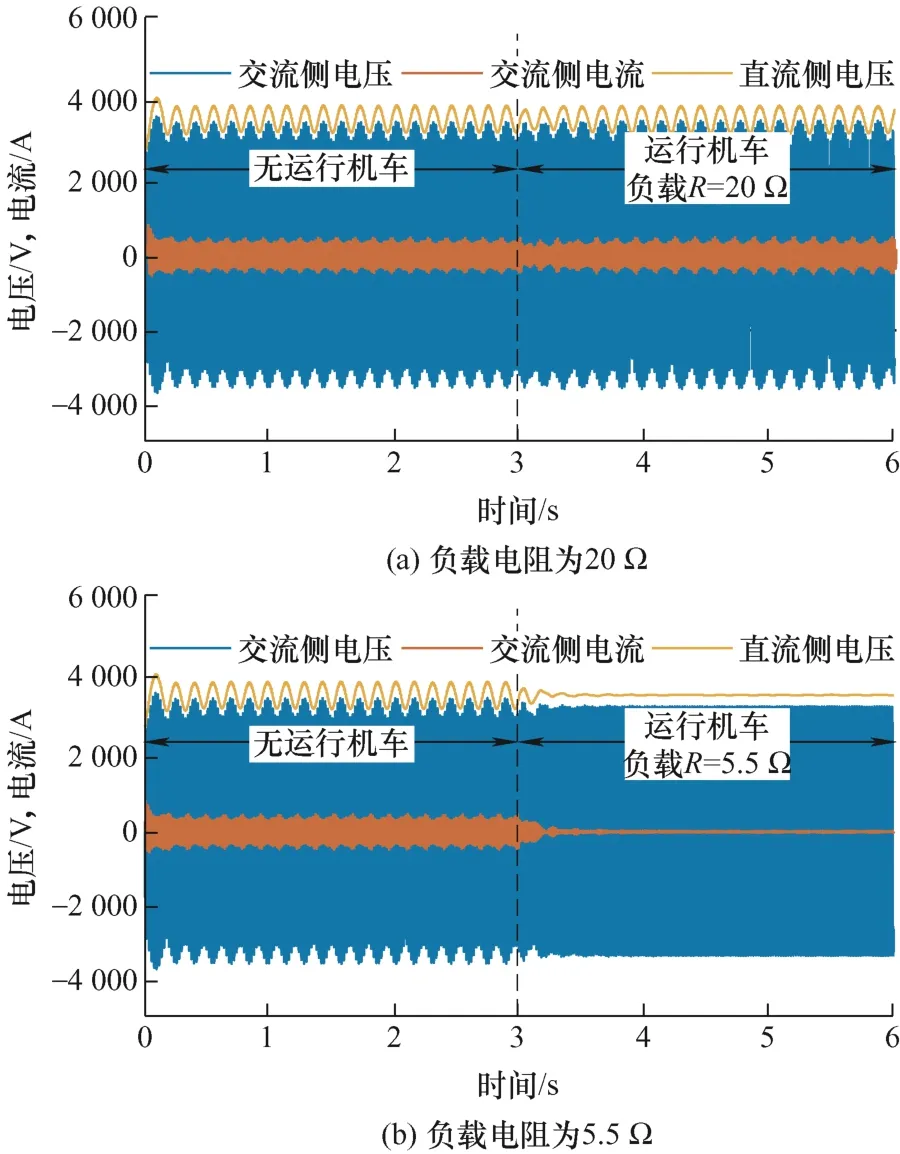
图22 电压电流仿真波形图(不同功率运行机车)
同时,对大功率运行机车设置不同的电流环带宽参数,得到如图23所示的电压电流仿真波形图。从图23可以看出,当电流环带宽设置为50 Hz时,加入大功率运行机车后系统低频振荡现象被抑制;当提高电流环带宽将其设置为200 Hz时,由图23b可知,运行机车的加入虽然提高了系统稳定性,但电流环的增大仍会使系统出现小幅振荡现象,说明了电流环带宽增大会降低系统稳定性。
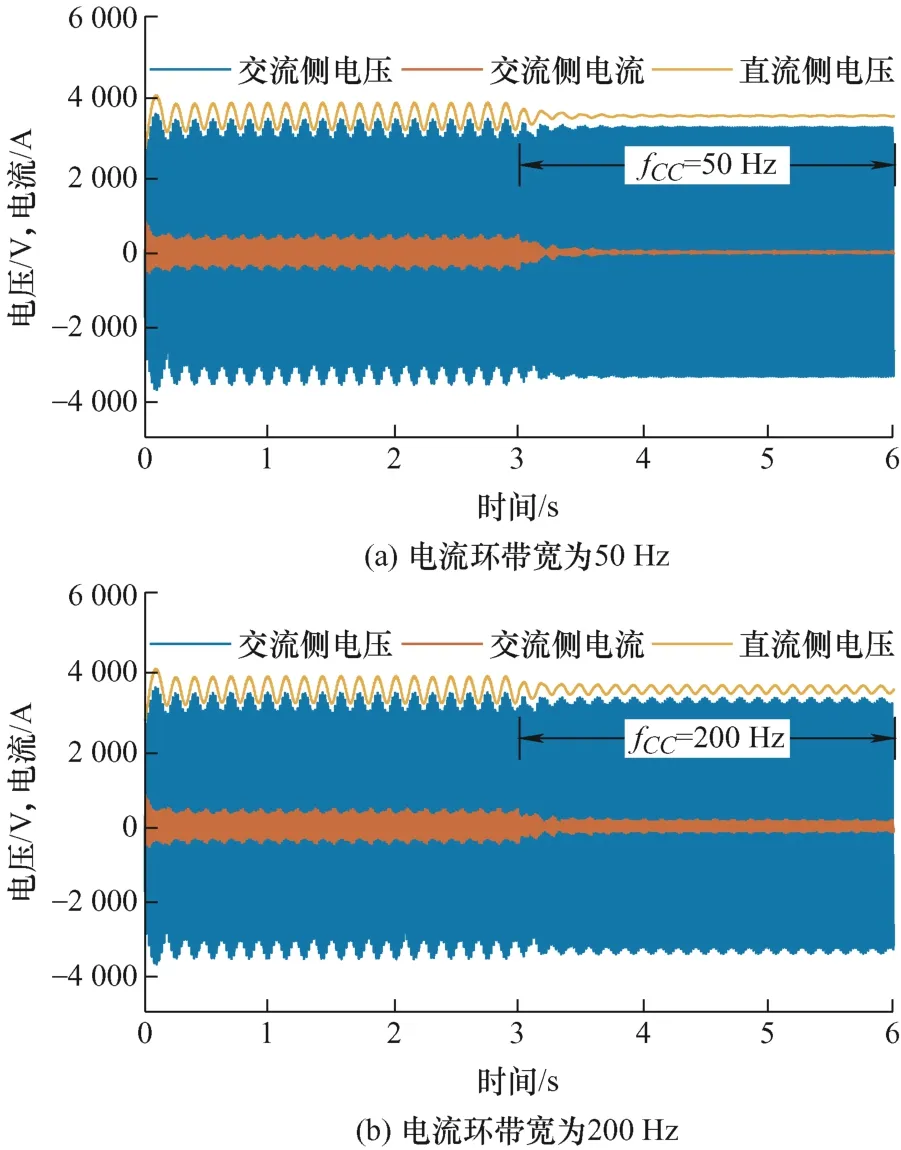
图23 电压电流仿真波形图(不同电流环带宽)
将运行机车设置为制动状态验证制动机车对车网系统的影响规律。如图24所示为车网系统机车侧电压电流仿真波形图,当车网系统发生低频振荡时,将制动机车加入车网系统中。由图24可知,加入制动机车后系统低频振荡现象被抑制,机车直流侧电压、交流侧电压电流恢复正常,系统达到稳定状态,说明制动机车可以抑制车网系统低频振荡,提高系统稳定性。
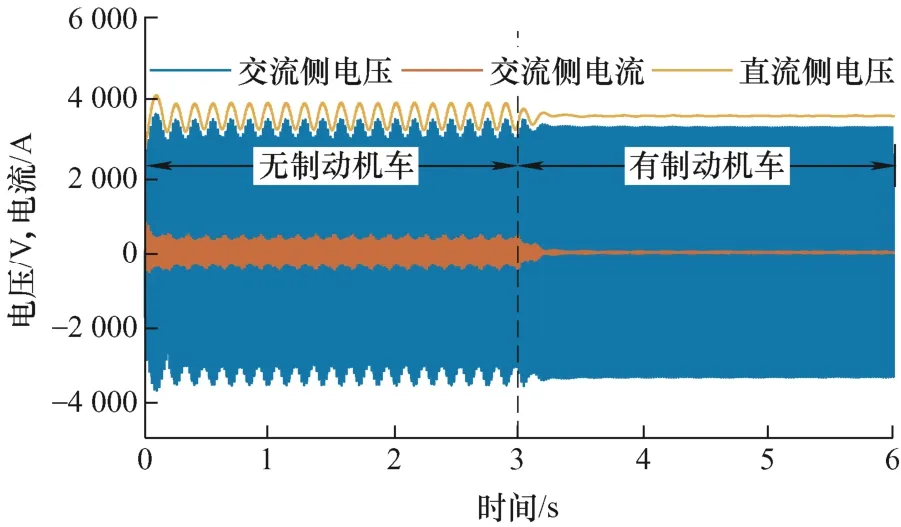
图24 电压电流仿真波形图(加入制动机车前后)
改变制动机车电流环带宽参数,分别设置电流环带宽为15 Hz和45 Hz,绘制如图25所示电压电流仿真波形图。由图25可知,随着电流环带宽的增加,系统由稳定状态变为不稳定状态,出现了频率约为6 Hz的低频振荡现象,与理论分析结果一致,验证了理论分析的正确性。
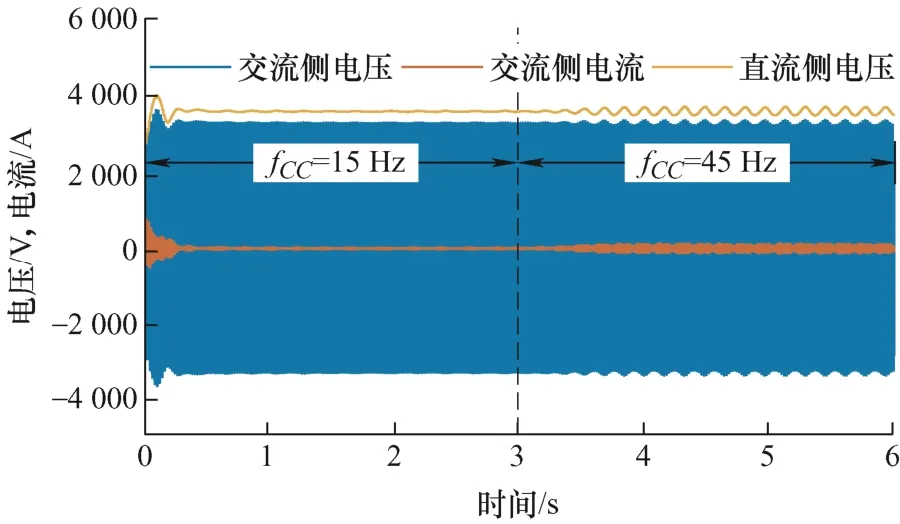
图25 电压电流仿真波形图(不同电流环带宽)
6 结论
本文通过建立整备机车和运行机车的单车阻抗模型,研究了运行机车不同工况对车网系统低频振荡的影响规律,具体结论如下所述。
(1) 运行机车在大功率运行状态和制动状态下通过改变阻抗相位使阻抗实部由负数变为正数,可以为系统提供正电阻,增强系统稳定性。
(2) 运行机车处于大功率运行状态时,运行机车功率的增加有利于抑制低频振荡。
(3) 运行机车不同工况下控制参数对低频振荡的影响规律:减小电流环带宽和电压环带宽都有利于抑制低频振荡,增强系统稳定性;PLL带宽的变化对系统稳定性影响较小。
