基于水下机器人定位与探测方法研究综述
2022-08-05王哲兴李军
王哲兴 李军
重庆交通大学机电与车辆工程学院,重庆 400074
0 前言
可以替代人进行水下危险作业的机器人被称为水下机器人[1]。水下机器人的目标探测与定位技术旨在通过不同的传感器设备或方法,对周围的环境或目标进行定位或测距来实现路径规划,以此改善机器人在水下作业的自主能力,使其能在复杂多变的水下环境完成多种任务,其中,水深、水位和水下地形是重要监测要素。当前的主流探测手段包括常规海洋浮标、河道水尺等,以及压力式、浮子式、微波雷达、超声波雷达水位计等各类固定站点的深度探测方式,此外,还包括以船载平台为基础的主动型声波探测,以星载平台为基础的被动型区域探测[2]。对于区域性探测,声波探测[3](尤其是超声波雷达系统)是应用最为广泛的测量技术,而在较浅的水域(一般指因为流速较低或水面相对狭隘而导致安装了探测仪器的船只无法进入的区域)测深应用难度较大。光学雷达容易被水体的透明度和海-气或河-气的不同介质的复杂光学环境影响,微波雷达则易被诸如海流流速、水流流速、风速等环境因素影响,探测应用在很大程度上受到了约束。此外,在规模较大、分辨率较低的情况下,当前的星载遥感测试结果仍然难以达到探测应用工作的标准。因此,用于水下作业的机器人开发与探测技术的研究是很有必要的。
1 水下探测装置分类
依照水下机器人的探测技术和装置的不同,可将主流的水下探测元件分为:激光雷达传感器、声波传感器、双目视觉摄像头、声纳传感器、毫米波雷达传感器、红外线测距传感器以及其他测距元件。这些不同的装置或探测方法由于探测原理不同,其探测的效果、完备性也各不相同。按照不同的使用环境与条件,需要选择不同装置的机器人来进行探测,用以取得最为良好的完备性、准确性、精确性,是广大学者共同追求的目标。
依照水下机器人在探测过程中装置使用方式的主动性与被动性,可以分为主动测距与被动测距。向探测对象发送电磁波,再接受由其反射回来的电磁波信号的传感器称为主动式传感器[4];只能被动接受来自地面目标发射的来自太阳的能源或是探测目标自身散发的电磁波能量信号的传感器被称为被动式传感器。能够接收从地面或被测目标散发出来的电磁辐射的元件是探测器,也是传感器的重要组成部分,其主要功能是测量和记录所接收到的辐射信号。典型的探测器是双目立体视觉摄像机和单矢量水听器[5]。本文综合相关文献,从超声波雷达、激光雷达、双目立体视觉摄像头这几个目前被广泛运用的主流工具的结构与原理出发,介绍不同的水下目标探测与定位技术的研究进展,列举它们的优缺点,并且尝试对未来的发展方向与面临的挑战提出具体分析与展望。
2 典型的水下探测传感器
2.1 激光雷达
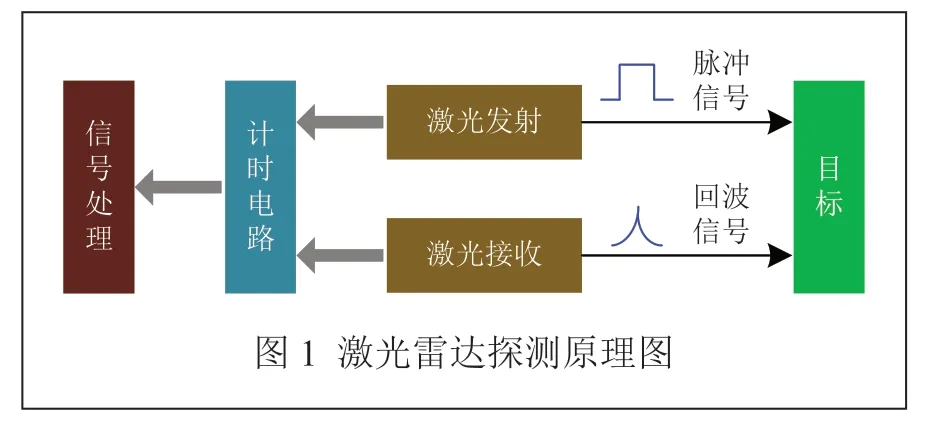
激光雷达即Lidar,其中“Li”代表“light”,“dar”代表“detection and ranging”,意为以光来探测和度量。激光雷达又被称为激光成像探测或测距,是一种通过发射激光,然后测量发出信号到接收信号所消耗的时间以及接收到的信号强度来计算被探测目标的距离、方位以及世界坐标等数据的雷达系统。其主要优点体现在频率高,实时性强,准确率高等方面[5]。其基本原理如图1所示,测距仪释放出激光,同时计时电路开始计时,激光从被测对象反射回来后再被测距仪接收,计时电路关闭完成计时,进行信号处理,得到信号强度,计算出探测距离。
时域信号是指以时间为变量来描绘出信号的波形,类似于距离选通方法、相位测距方法等以时域信号特征为基础的测距方式,从二十世纪的中后期开始就在水下激光探测领域中层出不穷。以非时域探测为基础的探测方法则以干涉测距、三角测距、光子计数等方法最具有代表性。为了保证测量精度,诸如相位测距和距离选通的测距方法,均以开发出包含不同控制精准度的时域门宽度,或者长度不同的测量标尺的方法来改变信号的幅度、强度,为准确检测物体的速度、距离、坐标等参数提供技术支撑。例如,距离选通方法所含有的时域门控制的宽度是不会改变的,所以此方法在对应的时域范围内的对象进行检测的精度非常高,若被测对象超过此范围,则会出现测量误差;相位式测量方法则要求更为严格,既要求时域信号的循环周期和相位分割为固定值,又得满足门控范围中的信号必须是最值且具有唯一性。因此能得到以时域信号特性为基础的探测方式,其探测的范围和精度难以达到实操要求的结论[6]。
在以非时域信号特征为基础的探测方式里,最有特征性的是干涉法测距。该方法基于光强的周期变化的原理来达到测距目的。在实践中,干涉法探测的纵轴探测准确度可以精确到微米。该方法主要应用于探测相同水平位置上不同物体之间的间距,不过缺陷是无法表出被测对象的全部空间坐标。针对此缺陷,可通过调整连续波的频率来进行改善,再以相关检测来扫频后向的散射光,以此确定目标的距离信息,不过此种方式的探测精度容易受到散斑噪音的影响,又因为散斑噪声和频率之间没有关联,因此,该方法对于弱信号的探测精准度是较低的。如文献[7]介绍的水下三点式激光探测方法,该方法在8 m的测距区域内可以满足小于15 cm的平均探测误差的精度。此探测方法是通过3个探测元件一同对目标进行测量来获取位置信息,从而实现对对象的三维探测。然而,这种探测方式会因为同步性还有俯仰角的改变等原因导致出现探测误差。若需要检测强度较低的微弱信号,可以使用光子计数的探测方法来检测探测带宽中信号里的光子数量,测得目标距离。但通过微弱信号探测,可能会出现无法准确探测的情况,主要原因可能是因为光子数量小于散射的光子数量。
针对上述情况,YU Y等学者[8]以控制单次光子数量和改变频带宽度的方式来改善探测的准确度。虽然该探测方式能以时频域互相转换的方法达到高精度目标探测的目的,但是,由于时频信号自身的分散状态和数量的差异,致使使用任意探测方式都难以实现时频信号间匹配的精确。
针对匹配时频信号的问题以及信号过弱所产生的定距精度的不确定性问题,刘欣宇等学者[6]给出了利用小波变换理论和数学理念相结合来实现时频信息能量互相对应的探测方法。基于时域、频谱区域中信息的能量相互一致的特征以及频域的带通滤波特征,用二元样条插值的方法来表达信息的时频对应特性。为了提高对目标对象的精确测量能力,可通过对时域映射分析信号的多点近似逼近和对频谱进行分析的方法,实现对目标信号的时频分辨率升高,然后使用记录所有时域信号的幅值区域和区域内相应的频率之能量最值来获取与被测对象的距离数据。此方式可以对所有时域分析信息实现对频谱区域的有效获取和精确分割,从而提高时域分析信息的可识别性和与有效数据的时频对应,实现了提高实时测距信息精度准确性的目的。
2.2 声波雷达传感器
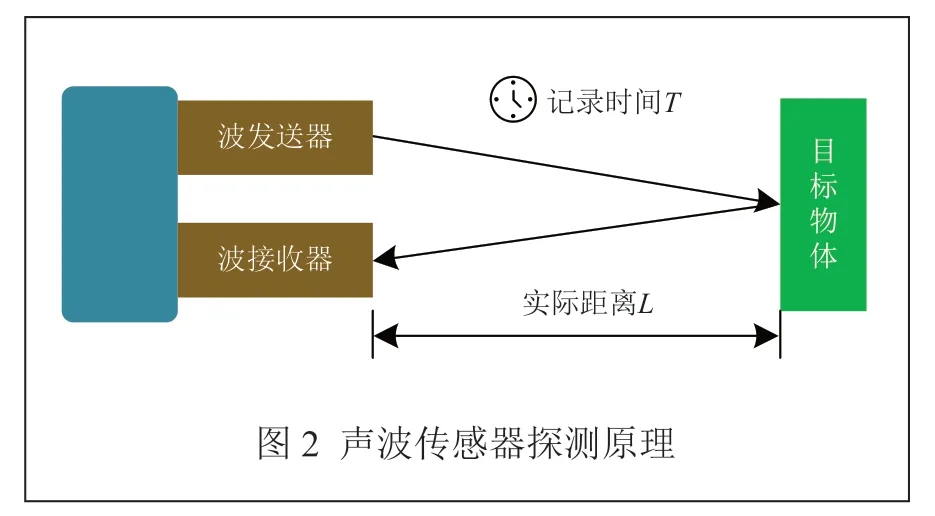
超声波传感器的物理特征和一般激光光束或反射波不同,它是一类频率大于20 kHz的弹性机械波,并且能够在气体、液体和固体中传输。此传感器的基本探测方式是由传感器的发送装置发送出特定频率的超声波,经由空气、液体等介质的传递,在抵达检测对象或障碍后反弹而回,然后再由接收器接收反弹回的信号脉冲。其优点在于无任何机械传动元件,不怕电磁干扰以及酸等强烈腐蚀性液体,且稳定性较强。利用超声波传感器在空气中的最大传播速度取值C=340 m/s,然后通过记录所消耗的时间T,算出发射点距目标以及障碍物之间的间距L,其基本原理图如图2所示。
超声波探测的主流方式包含相位检测法、波幅检测法以及渡越时间检测法等[9]。波幅检测法探测方式的计算精度有一定误差,原因是超声波在媒介中传递时容易被反射波的干扰给影响;相位检测法有可观的探测准度,不足之处是其测量范围受限,所以实践过程中通常通过渡越时间检测法来探测,其主要探测方法是记录由声波发射元件发射出超声波再返回被接收元件所消耗的时间,称为渡越时间(transit-time,T/T)。在实际测验过程中,多数通过异地脉冲反射的方法来探测与被测物体的距离,其中声波传递距离的一半即为测距结果。与陆地测距不同,在水下的测量环境非常复杂且变数颇多,只能通过强化改良陆地测距的方法解决更多的困难,从而落实地形测绘和基础测距。检验表明,通过调低功率、调高频率方式进行超声波测距是水下探测中较为实用的方式[10]。
对研发技术相对较成熟的国外科技而言,水下声波测距设备的开发较先进,例如美国的SeaBat8127多波束测量仪,最高作业深度可达1.5 km,该产品往往用于巨型水下工程或古文明文物鉴定,不适合小型水下测距[11]。
WAN D Z[12]成功研发了一款低投入的超声波水下测距机组,并能安放于水下机器人之中,放置其在水域中进行实验后,所得的数据与人工实际测量值完美匹配,符合测距要求。
方贺[13]提出了一种基于超声波传感器的水下测距系统。其设计系统内部不但包含高智能的错误数据上传系统和远距离数据传输系统,还满足多重的测距要求。其中,错误数据上传系统可以自主递交错误信息,减少相关工作人员的处理数据时间;而远距离数据传输系统可以将邮箱进行自动连接,系统获取大量数据的同时还传输数据到服务器内部。在环境恶劣的两极地区,可以减少工作人员的户外研究时间,保障人员安全。
由于声视觉系统存在检测盲区、噪声过大、分辨率低、准确度差等缺点,也因此有着最小测量距离的限制。文献[14]研究调查了一种通过光学视野与测量声波的水下探究方法。该方法通过摄影成像的特征,对摄影机与测距声波装置的几何关系提出新的算法——水下目标定位方法。该方法通过对定位的水下目标设计算法,再对水里监测采集的图像中的对象进行位置检验和分析误差,实际证明,该定位系统具有较好的定位和探测精度,并且达到水下作业的标准。
2.3 双目视觉摄像头传感器
双目视觉摄像头的基本原理如图3所示。通过左右两个电荷耦合器(CCD)摄像机同时在两个位置对目标进行图像采集,目标位置将在两个成像平面内生成坐标,而两者之间的差异就是视觉差。通过计算出视觉差,便可以基于相似三角形的基本定理来得到被测对象所在位置在世界坐标系中的实际坐标。在得到目标的立体坐标后,AUV和引导目标的相对位置数据可以基于以下公式计算,即:


其中,xl、xr——被测对象在两边成像面上的横轴坐标;
T——两摄像头的基线之长;
f——摄像头的焦距;
Z——基于此公式能计算得到对象与相机之间的距离。
水下双目视觉的距离测量与空气中距离测量不同,由于液体存在折射作用,入射光线在被摄入于封闭的防水罩中的双目相机之前会改变传播的方向,所以空气中的视觉成像模型不能直接运用于水下。文献[15]提出了一种精确的水下双目立体测量系统,先是基于非近似物理水下成像模型与Tsai的标定方法,为了获取外部参数对系统提前进行标定(因为内部参数可在空气中预先矫正);然后在已经标定的摄像机参数之后,提出一种可以将水下图像转化为空气中图像的矫正方法,即可以利用外极约束直接搜索匹配点。
由于水下条件复杂,存在各种杂物、浮游生物和微小颗粒,传统的水下双目视觉定位受此影响会导致画面不清晰、探测精度低。朱志鹏等学者[16]阐述了一种通过双目视觉的水下引导光源的检测方法。该方法包括水下摄像机标定、初始成像降噪、目标光源探测、位置数据计算等几个关键流程。在初始成像降噪环节,首先,通过引入拉普拉斯算子为均值降噪算法改进,同时增强成像强调光源;随后,以二极化的自适应阈值对像素进行二极化,实现将目标光源与背景分割,从而测量并匹配两边图像的平面光源;最后,采用双目定位原理,利用所测量到的光源数据来计算相对定位。朱志鹏等学者根据水下环境特点,对传统的均值降噪方式做出了改良,突出了引导光源的数据,将循环判断条件设为连通域,能自动得到高质量成像的二极化阈值,基于加权质心检验来获得准确光源中心,再加以实验证明该方法能达到水下对接准度标准,优化了探测的实时性[16]。
针对图像增强,郭雨青等学者[17]介绍了一种水中成像加强的算法。该算法是以ULAP高速高效的水下图像场景深度估计模型为基础,并且根据其学习训练得出的模型系数得到正确的深度图,估计背景光和透射图,以恢复水下的真实场景辐射;针对复原图像对比度差的问题,郭雨青等学者还通过CLAHE算法将成像进行了对比度优化,使得图像更加清晰,达到了水下图像增强的目的;最后通过YOLOv4方法来实现目标识别任务。由实验可知,此文献提出的增强方式可以较好地实现水下彩色图像的目标识别任务,比对其原图进行识别的平均精度提高了33%,可以运用到水下自主机器人上进行目标识别,为进一步研发水下自主机器人视觉任务奠定基础。
另外,在计算坐标间距时,双目视觉定位要对特征点进行解算,而水下图像质量低,数据量小,特征点的提取存在难度,匹配精度较低,实现有效测距有一定困难,所以探测的一个重要步骤是得到特征点。针对这个难点,盛明伟等学者[18]介绍了通过改进SIFT特征匹配算法,发展了一种水下双目视觉测量系统。其为了改进水下双目视觉探测的准度、速率和稳定程度等,开发了对图像的预处理、SIFT特征点匹配解算等新技术。由于传统成像的直方图均衡性结果中存在过于明亮和过于暗沉的现象或者过于增强的特征,研究者们提出了一种融入OTSU阈值解算方法的直方图均衡化方法的改进方案;此外,还介绍了一种通过融合稀疏匹配搜寻算法来进行改善的SIFT特征对应程序,匹配对应左右视觉的图像特征,并通过区域生长计算,可以分别得到水下标定板和机械手臂上的伪彩色视差图像,再从视差图像中获取探测对象对应的位置距离参数,达到了提升测距与定位精度的目的[18]。
2.4 设备比较
对于上文所提及到的设备,根据测距与定位时的各类环境需求,不同装置所呈现的特点各异,如表1所示。其中,激光雷达拥有高精确度,测距时可精确到厘米,并具有高数据率,可增强测距的实时性,在水下的测距和目标识别不受温度与光线的影响,但缺点是如果水下有扬尘或水质不佳,则会引起反射,产生误报,或者在水下信号遇到反射差的障碍物,则可能只会反射回来部分信号能量,降低检测的可靠性。适用于平静的浅水地区,如军事领域,在水下可快速部署机载激光扫描系统,探测、定位和跟踪水下或水面物体,并能识别大型目标。

表1 不同设备的特点对比
双目立体视觉则不会有信号强弱或者识别率的限制,直接利用视差来计算距离,可视化程度高。但双目立体视觉也很依赖于设备本身与环境条件,低分辨率相机拍摄远距离图像会模糊,低光照环境图像质量差,测距精度会下降。适用于光照条件好的浅水地区,可应用于水下目标的监控、水下军事设施的探测和侦察。
声波传感器则在黑暗的环境下也能有很好的探测性能,其频率高,波长短,对液体与固体的穿透能力都很强,因此在很多短距离的工作条件下有很好的探测与定位效率。而其劣势是抗干扰能力弱,传感器的输出很容易因为任意声学噪声的干扰而受到影响,过近的、运行频率相同的声波传感装置会出现声学串扰现象,同时也易受到烟雾、灰尘的干扰。其应用主要为水下监视,用于对水下目标进行探测、分类、定位和跟踪。
3 总结与展望
本文对水下机器人探测与定位方法进行了探究,按照其使用装置与设备对水下机器人进行大致分类,并进一步简要阐述了测距设备的基本原理、特征和改善方式。对于不同环境所需求的水下机器人,其探测原理与特点有所区别,进而让不同设备在不同算法和环境条件下有多样的使用方法。如在光照情况良好的清晰水面下可以采用双目立体摄像头传感器,发挥对障碍物检测和辨识以及成像测距的优势,也可以利用激光雷达传感器在清澈的水下和非常温环境进行高精度远距离探测与作业,而声波传感器则不惧电磁干扰与强腐蚀液体,可在无光的条件下穿透液、固体进行探测。
现有的水下作业机器人或探测技术已经有了大量的发明与研究改进,不同的装置在其对应环境的探测工作中具有一定的优势,对于更为复杂环境下的探测,例如动态环境下的定位与测距,或是在黑暗、充满噪声的扬尘水下环境,则上述传感器都难以发挥作用,因此,通过促成多种传感器融合,在高维、动态、复杂以及多变的环境中进行水下探测的研究,将成为水下机器人探测研究的主流方向。
