横列式双倾转旋翼机控制系统研究
2022-08-05施啸宇赵君宝黄一敏
施啸宇,余 帆,赵君宝,黄一敏
(南京航空航天大学自动化学院,南京 211100)
0 引言
横列式双倾转旋翼机是设计有一对可倾转旋翼短舱的独特飞行器,根据旋翼短舱角度可将其工作模式划分为直升机模式、过渡模式和飞机模式,因此它同时具备常规直升机的垂直起降和常规固定翼的低功耗巡航的优点。随着电池、桨叶和电机等上游供应链的发展,近两年大量资本涌入电动垂直起降飞行器(electric Vertical Takeoff and Lan-ding, eVTOL)行业,倾转旋翼机再度成为研究热门。横列式双倾转旋翼机这类飞行器由于旋翼短舱的主动倾转,飞行器本身的气动特性和操纵特性显著改变,且需要完成控制舵面的转换,因此过渡过程具有稳定性差、非线性强和控制难度大等特点。
由于横列式倾转旋翼机兼具气动操纵舵面和旋翼变距操纵,故过渡过程中存在明显的舵面冗余,因此过渡过程的操纵分配和控制方法的选取是横列式倾转旋翼机的两大控制重难点。夏青元等采用一次分段函数实现操纵分配,并在其设计的倾转航模上进行飞行验证;陈永等采用基于前飞速度的二次分段函数实现操纵分配,并在仿真环境中进行验证。以上研究人员仅考虑到总距通道在过渡过程中需要从高度控制过渡到速度控制,仅从定性角度选取了单调性合理的函数作为过渡系数,因而缺乏理论证明和鲁棒性验证。而且他们的研究对象均是小型航模,其倾转过渡的速度跨度小且舵面操纵能力足够强,总距通道的操纵分配策略对标称过渡效果的影响不大。
国内外各研究所和高校针对横列式倾转旋翼机过渡过程控制策略同样展开了大量研究,其中夏青元单独设计了姿态内回路和轨迹外回路,通过基于神经网络补偿的自适应控制理论设计内回路,采用经典 PID 理论设计外回路,达到了满意的控制效果;毋萌采用基于线性模型的模型预测控制(Model Predictive Control,MPC)算法,从而实现依据实际场景在线调整控制器结构和参数;C.Papachristos等针对倾转三旋翼提出了基于线性二次型调节器(Linear Quadratic Regulator, LQR)控制算法的姿态控制器设计,并进行了仿真验证;姜泽翔等将基于自抗扰控制器的姿态回路和PID轨迹控制器组合起来,解决了倾转旋翼无人机抗风性能差的问题。Chen Q.等设计了自适应控制器和低通滤波器,并达到预期的控制性能。以上现代控制理论大都适用于理论仿真而无法工程化,而本文的研究对象是与国内某研究所合作的工业级横列式双倾转旋翼机,因此本文仍然选用物理意义明确、工程经验成熟且模型置信度兼容性强的PID控制。
1 建模与问题描述
1.1 研究对象描述
本课题来源于和国内某研究所合作的某横列式倾转旋翼机飞控系统设计的合作项目,对象无人机包含配有自动倾斜器的横列式双旋翼、可纵向转动的旋翼短舱、涡轴式发动机、机翼、双垂尾、平尾和轮式起落架。发动机通过机械传动稳定左右双旋翼的旋转,左右双旋翼的转速保持一致但方向相反,从而可抵消单个旋翼产生的反作用力矩。飞行器具备常规直升机的操纵机构、常规固定翼飞机的操纵机构和控制旋翼短舱转动的倾转机构,其中常规直升机的操纵系统包括单个旋翼的总距角、纵向周期变距以及横向周期变距,常规固定翼飞机的操纵系统包括升降舵、副翼、方向舵以及襟翼。该无人机设计首飞质量为600kg,其主要设计参数如表1所示。
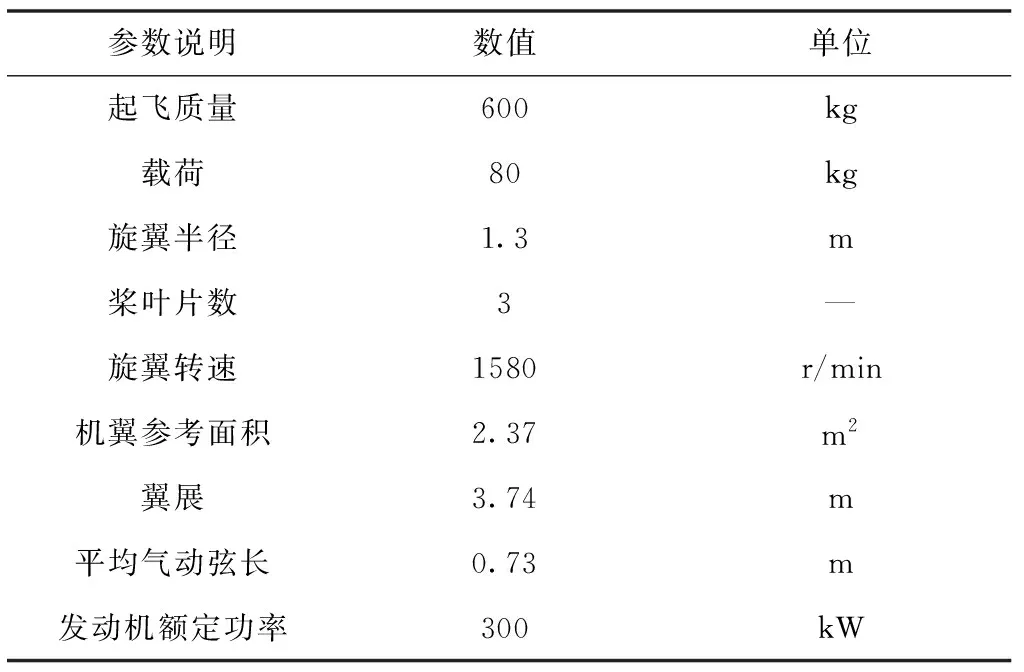
表1 对象无人机的主要设计参数表
1.2 过渡过程描述
本文主要研究平飞定高前提下的倾转过渡控制策略,将对象横列式倾转旋翼机的倾转过渡过程按照气动特性和操纵特性划分为直升机模式操纵段、混合模式操纵段和飞机模式操纵段,如图1所示。

图1 倾转过渡过程分段图Fig.1 Sectional diagram of tilting transition process
1.2.1 直升机模式操纵段
直升机模式操纵段飞行器速度较小且旋翼短舱接近于垂直位置,此时气动舵面的操纵效率较低,而旋翼变距的操纵效率较高,飞行器的升力主要来源于双旋翼的拉力,其操纵方式和气动特性类似于直升机前飞模态。
1.2.2 混合模式操纵段
随着旋翼短舱的前倾,混合模式操纵段的速度进一步提高,飞行器的升力由旋翼拉力的垂向分量和气动升力共同组成,气动舵面的操纵效率进一步提高,而旋翼变距效率由于入流速度的增加而进一步削弱,此时气动舵面和旋翼变距均有一定的操纵效率,故此段是气动舵面和旋翼变距的混合控制阶段。
1.2.3 飞机模式操纵段
飞机模式操纵段飞行器速度最大且旋翼短舱接近于水平位置,此时旋翼变距的操纵效率足够小,而由气动舵面全面接管其操纵权限,旋翼的工作方式类似于螺旋桨推进器,其操纵方式和气动特点类似于固定翼平飞模态。
1.3 建模与特性分析
本文采用混合机理法建模,基于Rotorlib旋翼叶素模型计算旋翼的气动力与力矩,针对机体气动模型采用增量式气动数据建模,其中包括基态的气动数据与舵偏产生的气动数据增量。最后将旋翼模型与机体气动模型计算得出的力和力矩转化到机体坐标系下,并代入刚体六自由度运动方程。
图 2(a)、(b)是以总距和纵向周期变距为输入的机体系下的时域响应曲线。由图2(a)可以看出,当短舱倾角为90°时,总距输入无法引起前向速度响应,随着短舱倾角的减小,总距能够引起的前向速度响应逐渐增大;且短舱角小于50°以后,前向速度响应的峰值均大于1m/s,表明在飞机模式操纵段,总距对速度影响较大。由图2(b)分析可知,纵向周期变距输入对前向速度的响应随着短舱角的减小而减小,短舱角为50°时,前向速度响应峰值仅为0.2m/s,这表明纵向周期变距仅在直升机与混合模式操纵段对速度有一定的操纵能力。
图 2(c)、(d)是以总距和升降舵为输入的机体系下的时域响应曲线。由图2(c)可以看出,当短舱倾角大于50°时,高度变化率响应的峰值均在1m/s以上,这说明直升机与混合模式操纵段总距对于高度的操纵影响较大,飞机模式操纵段总距对高度操纵能力持续减弱。由图2(d)可以看出,升降舵随着短舱角的减小,对高度的操纵能力会逐渐增强。
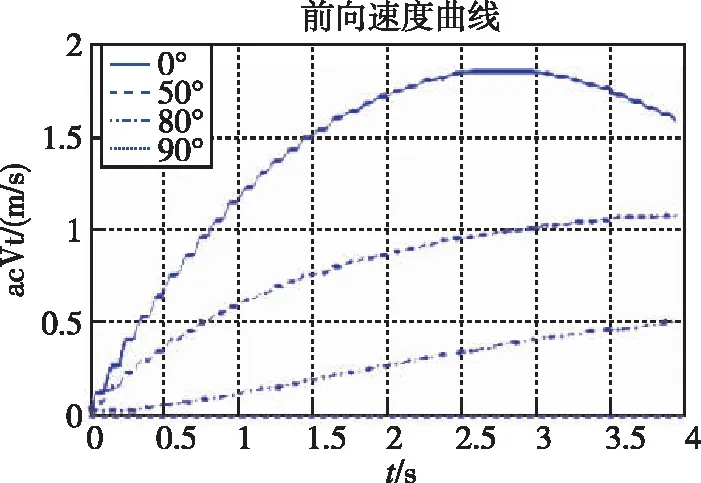
(a) 总距到Vx操纵响应

(b) 纵距到Vx操纵响应

(c) 总距到Vy操纵响应

(d) 升降舵到Vy操纵响应图2 过渡过程操纵响应曲线Fig.2 Transition process control response curves
综上所述,倾转过渡过程中,旋翼与气动舵面在纵垂向的操纵能力会随着短舱角的变化而变化。对于前向速度通道而言,直升机与混合模式操纵段以纵向周期变距影响为主,飞机模式操纵段以总距影响为主。对于高度通道而言,直升机与混合模式操纵段以总距影响为主,飞机模式操纵段升降舵与总距均有一定影响,但是总距对高度的操纵能力会随着短舱角的减小而逐渐消失。
2 加速过渡策略设计
2.1 标称轨迹设计
本文的研究目标是在保持高度不变的前提下,控制对象能平稳快速地跟踪预先设计的速度轨迹,确保无人机安全地由直升机悬停模态快速过渡至固定翼前飞模态。在此过程中,前行桨叶压缩性、发动机功率及变距限幅均限制了同一短舱倾角下飞行器的最大速度,而飞行器失速则限制了同一短舱倾角下飞行器的最小速度,因此倾转旋翼机必须飞行在一定的短舱倾角-速度范围内,这个安全范围称为过渡走廊。
在加速倾转初期,主要由旋翼变距提供前向加速度,因此需要通过选取合适的速度以减小旋翼变距出舵量,从而保证足够的控制余量。在加速倾转后期,倾转旋翼机类似于常规固定翼,需要选取合适的速度以保证安全飞行迎角,从而避免失速。综合以上两点即可在过渡走廊中设计一条最优过渡轨迹,称为标称轨迹。为了方便工程化实现,本文选取加速倾转过程中的几个特征工作点并进行配平。配平值作为前馈量加入控制回路中,以增加快速性。由于加速过渡过程中,前飞速度可能受到大气环境的影响而出现波动,因此本文设计短舱开环的倾转策略。在确保短舱倾角单调变化的前提下,以短舱角度为自变量线性插值出倾转全过程的控制前馈量,线性近似出的前馈量与实际配平值之间的误差可以视为干扰,并由控制回路调节。
加速倾转过程中,旋翼拉力垂向分量由于短舱前倾而不断减小,而机翼气动升力由于速度增大而不断增大,但两者的合力变化可忽略不计,不同短舱倾角下的旋翼拉力垂向分量和机翼升力在飞行器总升力的占比如图3所示。
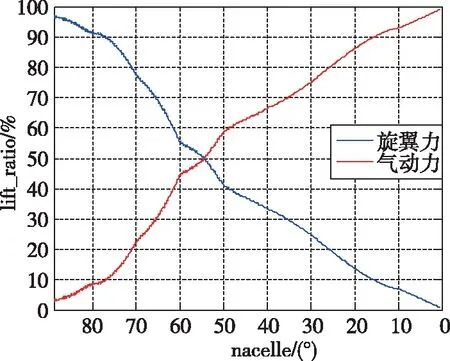
图3 机翼升力和旋翼拉力垂向分力占比曲线Fig.3 Vertical component ratio of wing lift and rotor pull
因此,本文依据倾转各阶段的气动特性和操纵特性分别设计各通道控制律,分段的自变量选取为过渡过程中绝对单调的短舱倾角而不是速度,对象飞行器的分段如表2所示。
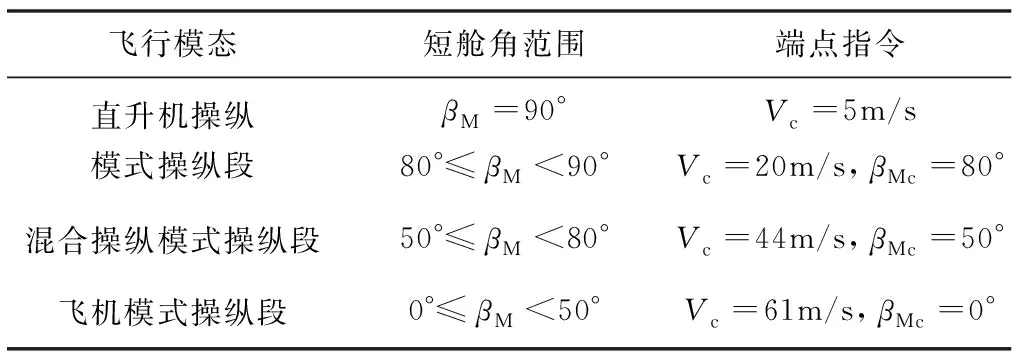
表2 倾转过渡过程分段表
2.2 舵面混控系统设计
对象无人机的发动机功率充裕,且可以根据旋翼转速偏差自行调整输出扭矩,故本文不考虑发动机控制;为了减少不可控因素,襟翼在整个过渡过程均保持固定角度,因此对象无人机的纵垂向可控舵面包括总距、纵向周期变距和升降舵。对象无人机的直升机操纵段和混合操纵段的舵面分配如表3所示。

表3 倾转过渡各段操纵分配表
由于直升机操纵段时对象无人机的前向速度较低,大气环境对于空速的影响较大,无法获取准确的空速信息,故该段采用地速控制回路。此段升降舵的偏转基本上不影响飞行器飞行状态,为避免升降舵在较大速度时突然接入控制带来的扰动,故在直升机模式操纵段即接入升降舵姿态增稳控制。随着飞行器逐渐加速至混合操纵模式,速度信息源切换至空速,升降舵舵效增强,此时升降舵不接高度控制外环,以降低纵垂向耦合,且旋翼变距仍有充足的控制裕度,故升降舵仍保持姿态增稳回路控制,从而简化过渡过程的控制结构。因此,两段的气动特性虽然不同,需要分段设计特征参数,但舵面分配和控制律设计保持一致。
飞机模式操纵段飞行器的升力主要由机翼升力组成,周期变距对于俯仰通道的控制效果明显弱于升降舵,且旋翼拉力在前向的分力已明显增强,总距足以调节飞行器的飞行轨迹。考虑到飞机模式操纵段相较于直升机悬停/小速度模态和固定翼巡航模态,其本身就处于准平衡状态,非线性特性强,纵垂向耦合严重,故操纵分配时考虑由升降舵完全取代纵向周期变距。
升降舵通过改变飞行器的俯仰力矩并间接引起姿态变化,进而引起气动升力变化,从而实现对高度轨迹的控制,因此存在滞后特性,故其控制能力随着速度的提高而增强;而总距是直接力控制,总距通道的控制效果较好,其对于高度的控制能力主要受短舱倾角和飞行速度的影响而逐渐减弱。故随着旋翼变距的退出,由总距辅助升降舵逐渐接管高度的控制。
3 原控制策略分析
3.1 原控制结构
由2.2节分析可知,虽然直升机模式操纵段到混合模式操纵段的升力来源已经明显过渡,但兼顾过渡安全和结构简化后,两段的控制结构保持统一,即以旋翼舵面控制为主,气动舵面仅接通姿态内环为辅。直升机模式和混合模式操纵段纵垂向控制律如式(1)所示。

(1)
相较于直升机与混合模式操纵段,飞机模式操纵段控制结构存在一定的差异。从旋翼操纵舵面来看,总距通道由高度控制切换为速度控制,纵向变距由于操纵能力不足,退出速度控制通道。从气动操纵舵面来看,升降舵接入高度控制回路,变为高度的主控通道。具体控制律结构如式(2)所示。
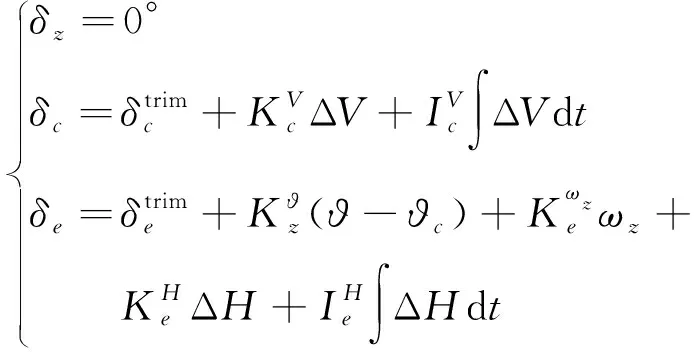
(2)
3.2 鲁棒性仿真
为了验证控制策略设计的有效性和飞机模式操纵段的飞行控制效果,考察舵面切换对于速度与高度控制的影响,设计仿真验证方案如表4所示。
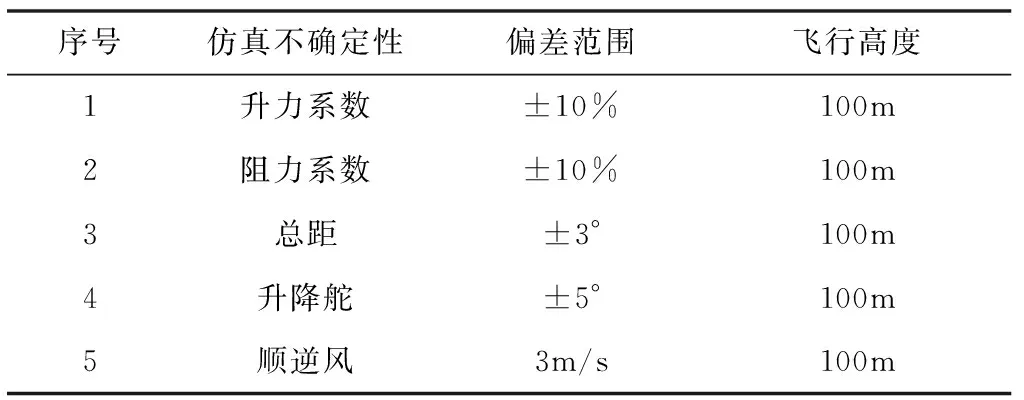
表4 飞机模式操纵段仿真条件
图4给出了极限干扰偏差情况下飞机模式操纵段纵向仿真曲线,分析仿真曲线,可得如下结论:
1)极限干扰偏差情况下,可以看出,速度控制偏差保持在±3m/s内,空速基本能够保持对指令的跟踪性能。其中顺逆风干扰对空速影响最大,速度偏差幅值可达4m/s,但由于总距速度控制回路的作用,曲线变化逐渐平缓。
2)飞机模式操纵段高度控制效果不理想。主要是因为过渡过程中旋翼拉力在速度方向的分量不仅容易引起速度的变化,其垂向分量也会对高度轨迹造成影响。当采用总距角调节飞行速度时,旋翼拉力在垂向的分量对无人机的高度轨迹造成干扰。但是升降舵通道的轨迹响应滞后特性将导致高度偏差逐渐增加。
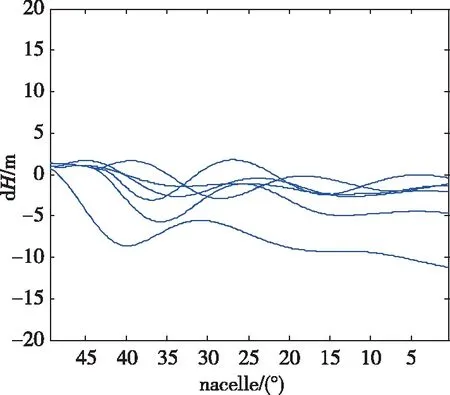
(a) 高度差值曲线
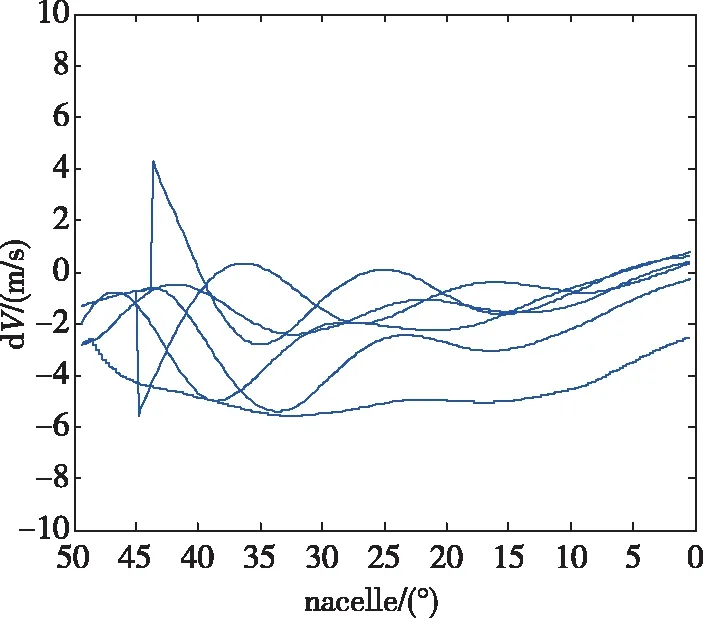
(b) 速度差值曲线

(c)总距变化曲线

(d)升降舵变化曲线图4 飞机模式操纵段鲁棒性仿真曲线Fig.4 Robustness simulation curve of aircraft mode control section
因此,有必要对飞机模式操纵段控制策略进行改进,以降低纵垂向的耦合,在保证速度控制精度的前提下,尽可能改善高度控制性能。
4 飞机模式操纵段控制策略研究
4.1 总距通道控制结构改进
飞机模式操纵段的非线性特性严重且纵垂向耦合最为明显,因此设计了独特的操纵分配方法:总距通道以余弦分配的方式主控速度,辅控高度,纵向周期变距以指数函数退出控制,而升降舵在姿态增稳内回路的基础上接通高度控制外环。
总距通道由于是直接力控制,在飞机模式操纵段的短舱倾角范围内,其对高度和速度均有足够的控制能力,同时也引起了纵垂向控制耦合。因此,本段选用过渡过程天然存在的余弦函数关系,总距通道的高度控制结构参考直升机悬停/小速度段的高度阻尼回路,速度控制结构采用由固定翼巡航模式设计的PI速度控制,过渡过程中总距高度控制分量和总距速度控制分量参照具有物理意义的余弦函数的权重进行分配,具体控制律如式(3)所示。

(3)
4.2 控制原理
文献[16]对于过渡过程的受力分解到气流系有

(4)

当无人机处于飞机模式操纵段时,短舱角∈(50°,0°),纵向速度在44m/s~61m/s内,旋翼逐渐转换为螺旋桨特性,为突出主要矛盾,忽略旋翼挥舞的影响,可以得到式(5)

(5)
从式(5)可以看出,过渡过程中,旋翼拉力在纵垂向的分量与短舱角有着天然的三角函数关系,而飞机模式操纵段的纵垂向耦合程度也与旋翼轴的倾转有关。因此,可以对总距通道的速度控制分量与高度控制分量按照一定权重系数进行分配,权重系数由短舱角的余弦值确定。
4.3 鲁棒性仿真
本节选择3.2节中的仿真条件进行验证,其仿真曲线如图5所示。
相较于3.1节的控制策略,本节提出的基于总距的余弦分配的改进控制策略在仿真曲线上表现得更加平滑,其中速度控制偏差接近于0m/s,高度控制偏差仅为±2m。
4.4 多操控分配策略的控制指标对比
鉴于本文是与实际项目紧密结合的,项目要求在倾转实飞实验中,对象无人机的高度偏差应保持在5m范围内,否则需要人工遥调干预。由3.2节的鲁棒性仿真可知,等效总距舵面干扰对高度的影响最大,因此本节选择对象无人机可容忍的最大等效总距干扰作为量化指标,对比一次函数、二次函数和余弦分配的操纵分配策略的鲁棒性,如表5所示。
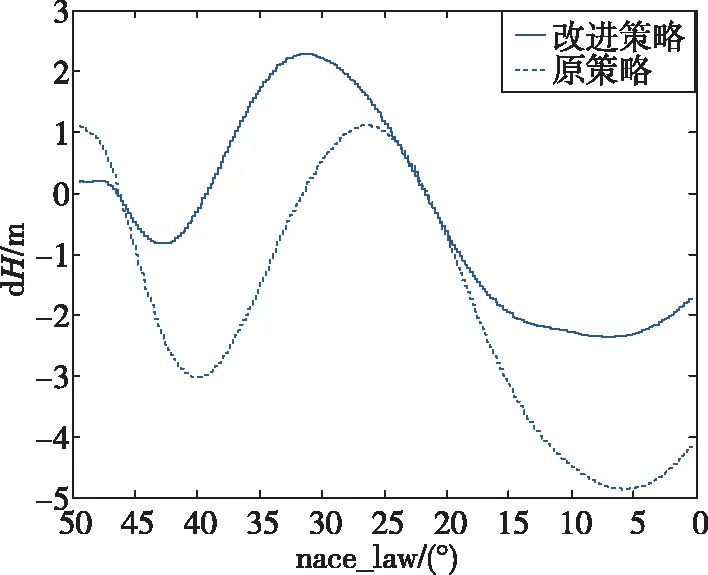
(a) 风扰动下高度差值曲线
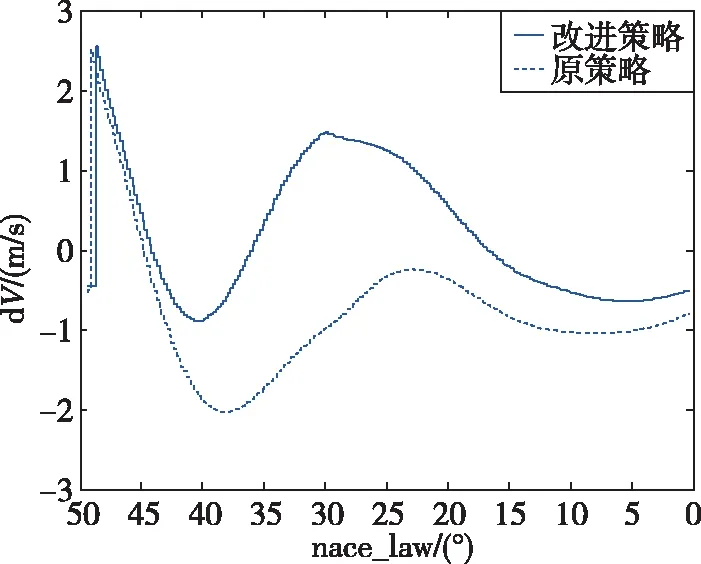
(b) 风扰动下速度差值曲线

(c) 舵面扰动下高度差值曲线
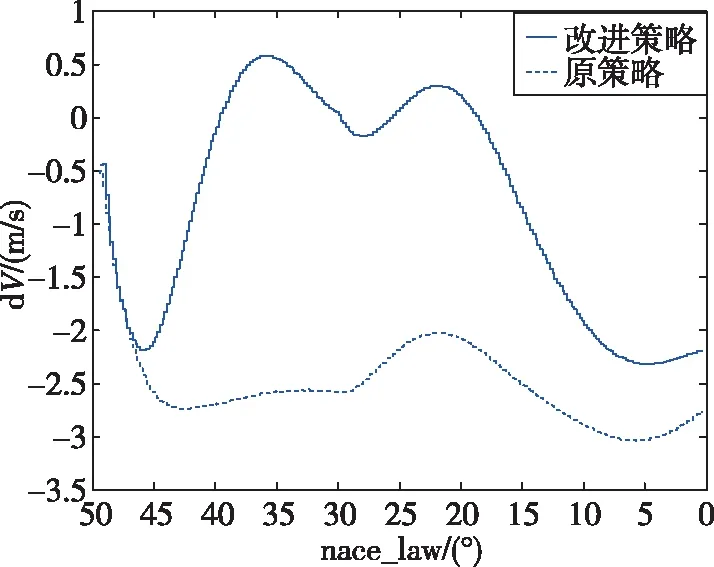
(d) 舵面扰动下速度差值曲线图5 飞机模式操纵段鲁棒性对比曲线Fig.5 Robustness comparison curves of aircraft mode control section

表5 不同操纵分配策略的关键量化指标
对象无人机的总距最大行程为10°,由于机械和安装误差等原因,总距误差不大于1°,考虑到实飞环境等不确定性,对象无人机的最大可容忍的等效总距干扰应大于1.5°。由表5可见,仅余弦分配策略满足需求。
5 结论
本文聚焦于横列式双倾转旋翼机平飞过渡的操纵分配等纵向控制问题,从经典控制理论出发,分段设计了舵面混控系统和纵向控制结构,并借助鲁棒性仿真验证了纵距余弦分配的有效性,具体研究成果包括:
1)从飞行器气动特性和操纵特性角度出发,将加速过渡过程细化为三个阶段,简化了标称轨迹的工程化实现。
2)从经典PID控制理论出发,根据各段的特点设计了各段控制律,并结合鲁棒性仿真,揭示了常规过渡控制的短板。
3)针对过渡过程的操纵分配问题,从控制机理和仿真对比两个角度,分析了总距余弦分配的优越性。