基于固定式视频的车速鉴定方法研究
2022-08-03赵丽丽唐阳山
赵丽丽,唐阳山
(辽宁工业大学,辽宁 锦州 121000)
引言
随着城市化进程的发展,我国汽车保有量日益增多,在为人民群众带来便利的同时,也引发了诸多交通安全问题,交通事故频发问题尤为严重,不仅给人民群众的生命安全造成了严重损失,也大大阻碍了我国经济发展。近年来在政府各相关职能部门的联合管控下,虽然形势有所好转,但是其绝对数仍相对较高。如何公平公正地处理事故,进而从已发事故中寻找规律来预防事故,是交通管理部门一直思索和研究的问题,而目前事故处理中面临的较大难题是事故车辆行驶速度的计算。车速的鉴定结果不仅可以分析交通事故的性质,确定交通事故发生原因,而且是认定划分交通事故责任的重要依据。传统的车速鉴定方法(如雷达检测器、地下线圈检测器等)虽然在车速鉴定领域的应用已经较为成熟,但其成本较高,且对于复杂的交通事故难以精确测量。而基于视频的车速鉴定方法不仅成本低,而且可方便快捷地对车速进行鉴定,还可还原交通事故发生场景,从而对复杂的交通事故进行精确测量。因此,近年来国内外许多研究学者在视频测速领域进行了大量研究。尹国祥[1]在肇事车辆的车速鉴定中,根据视频图像的帧速率、起点与终点间单帧图像的数量和交通事故现场的实测距离,计算出起点与终点间肇事车辆的平均速度。该方法只能计算“点对点”条件下固定间隔特征点对应的车速,无法算出固定间隔特征点间任意位置的车速。倪志海等[2]提出了时间插值法和距离插值法的车速计算数学模型。为了提高车速鉴定精度,何烈云[3]提出了利用直接线性变换法进行像方坐标系和物方坐标系的相互转换,从而由目标车辆特征点的像方坐标获得目标车辆特征点的物方坐标,再利用帧间差分法来测算出车辆行驶速度。ELNAZ[4]等提出了一种基于成像系统的几何形状和定义固心角的新方法。该方法通过提取视频帧,在两帧中确定车牌在图像平面上的位置,计算车牌图像中的像素数。然后,利用立体角关系计算两帧内车辆的位移和速度。该方法虽然不受车牌高度、摄像头安装高度和车道的影响,但复杂度高,鲁棒性差,计算精度较低。
针对现有的基于视频的车速鉴定方法只能获得车速范围而无法得到精确车速的缺点,提出了改进的车速鉴定方法。
1 提高视频图像质量与效率
张重德和张崇巍[5]所选取的特征点为车尾线,XIAO[6]所选取的特征点为车厢前后连接点,刘虹伯[7]所选取的特征点为轮胎接地点,选取目标车辆的轮胎中心为特征点进行车速计算。因此,需要获取车轮中心的坐标位置。
1.1 提高视频图像质量
在对图像采集过程中,由于车轮表面的污渍、天气状况、照明条件等因素导致采集的图像存在一定干扰和噪声,而图像预处理可以有效地突出车辆图像的有用信息,消除或减少无用信息,从而初步提升视频图像质量[8]。图像增强处理目的在于突出图像中感兴趣的成分,将原来不清晰的图像变得清晰。因此,需要通过对二值化图像进行图像增强、图像去噪来增强图像质量,在对车轮中心进行标定前需对采集到的图像进行质量增强处理。
1.2 提高视频图像处理效率
ROI 即感兴趣区域,为包含目标的区域,通过ROI 定位选择车辆轮胎为感兴趣区域可以大大减少之后步骤的运算量[9]。因此,通过ROI 定位及对图像进行适当裁剪可以提高视频图像处理效率。为处理方便,把RGB 真彩色图像转化为灰度图像,使用合适的阈值将灰度图像转化为二值图像。最后,利用Kinovea 软件可以快速获取视频图像中目标车辆特征点及虚拟参照线的图像坐标,从而提高处理效率。
2 固定式视频的车速鉴定方法
针对目标车辆直线行驶的情况进行分析,目前基于固定式视频目标车辆直线行驶时的车速鉴定方法有两种,一种是利用道路环境参照距离计算车辆行驶速度;一种是利用目标车辆参照距离计算车辆行驶速度。
2.1 现有的车速鉴定方法
(1) 逐帧检测视频图像,观测视频图像的帧率f,计算相邻两帧图像之间的间隔时间在目标车辆同侧车身表面距地等高位置上选取两个至车辆纵向对称面等距离的特征点;(3) 选取一个道路环境参照物或设定一个虚拟参照物;(4) 记录目标车辆两个特征点通过该参照物所用图像帧数n=(n1,n2),其中n1<n2;(5) 测量目标车辆两个特征点之间的距离S';(6) 确定目标车辆两个特征点通过道路环境参照物时的行驶速度v。

2.2 改进的车速鉴定方法
由于现有的车速鉴定方法只能求得目标车辆行驶速度范围值,而无法求得其精确的行驶速度,故将利用时间插值法对其进行改进,从而获得精确的目标车辆行驶速度。图1为时间插值法车速计算模型。
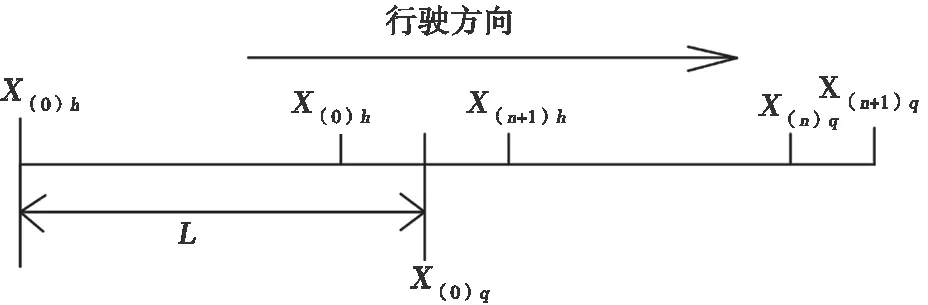
图1 时间插值法车速计算模型
图中:X(0)q、X(0)h—前、后轮中心在第一帧时的横坐标;X(n)q、X(n)h—前、后轮中心在第n帧时的横坐标;X(n+1)q、X(n+1)h—前、后轮中心在第(n+1)帧时的横坐标;L—前、后车轮中心之间的距离,为一个特征长度,m。
由于当车辆行驶到第n帧时,后轮中心位置在X(0)q之后,第n+1 帧时在X(0)q之前,很难与X(0)q重合。因此,需要在n~(n+1)帧图像之间进行插值计算,求出两个特征点重合的时间。
改进算法:
(1)逐帧检测视频图像,观测视频图像的帧率f,计算相邻两帧图像之间的间隔时间
(2)在目标车辆上选取同侧的前后车轮中心作为目标车辆特征点。
(3)在视频图像上画一条参照线作为虚拟参照物。
(4)利用插值法计算目标车辆两个特征点通过该参照物所用时间,则目标车辆行驶过一个特征长度的时间:

式中: —X(0)q与X(n)h或X(n+1)h重合前的整帧数的数量。
(5) 目标车辆行驶过一个特征长度的平均速度:

(6) 随着目标车辆一直向前行驶,则以视频图像的第二帧为起点,一直重复上述过程,可以计算出多个连续帧间车速vm,对多个连续帧间车速计算其平均速度作为最终鉴定车速。
3 实例验证
以小型面包车沿A 路由南向北行驶至某路口时,大众牌小型轿车沿A 路由北向南行驶至此发生碰撞,造成两驾驶员和两车受损的道路交通事故为例,见图2。

图2 设定虚拟参照线
首先利用Kinovea 软件获取目标车辆特征点及虚拟参照线。然后利用改进的车速鉴定方法对本案例车速进行鉴定,经计算可得事故车辆的平均车速为65.128 km/h。利用现有的车速鉴定方法计算所得到的车速鉴定范围为64 ~66 km/h,而案例中事故车辆的实际车速为65 km/h。经比较可得,利用所改进的车速鉴定方法可获得较高精度的车速鉴定结果,且其计算结果误差在国家允许范围之内。而现有的车速鉴定方法只能获得车速范围而无法获得一个精确的鉴定结果。故改进方法具有一定的有效性。
4 结语
利用图像预处理、图像增强及图像去噪等技术提高图像质量,再利用Kinovea 软件获取目标车辆特征点及虚拟参照线的图像坐标,避免了因图像质量噪声问题带来的误差,提高了特征点的坐标标定精度。利用所提出改进的车速鉴定方法进行车速鉴定,可获得事故车辆精确的车速结果,而不是一个车速范围,从而提高了车速的鉴定精度。
