浮空器抓手结构优化设计*
2022-08-02袁军行王平安朱善璋
袁军行 王平安,2 朱善璋
(1.中国电子科技集团公司第三十八研究所 合肥 230088)(2.国家级工业设计中心 合肥 230088)
1 引言
浮空器是一种轻于空气的航空器,主要分为系留气球、飞艇和高空气球三类[1~2]。系留气球和飞艇目前已具备军事应用价值,两者的区别在于前者通过系留缆绳固定在地面上,后者则自带动力可在空中巡航[3]。高空气球在平流层具有较高应用价值[4~5],分为零压球和超压球两类,目前也是各国重点发展的浮空器产品。信息化时代,浮空器在信息战中具有巨大的应用价值,相对常规航空器和卫星,其具有以下优势:1)滞空时间长;2)载重量大;3)生存能力强;4)预警功能强;5)侦察视野广[6~8]。
因此,无论是在国际、国内,浮空器在未来的数十年里将迎来全新的发展。虽然浮空器设计、制造和应用技术得到了快速发展,浮空器的发展越来越受到各方面的重视,应用市场也日益广泛,但浮空器相关的设计标准少之又少、极度匮乏[9~10],尤其浮空器典型结构件的设计在文献中鲜少看到。
抓手是浮空器囊体的主要承力部件,为柔性结构,广泛应用于各类浮空器产品,主要用于浮空器在锚泊和驻空期间承受来自地面锚泊设备的系留载荷,将地面系留载荷或安装设备载荷扩散至囊体[11],其设计的优劣直接影响浮空器产品的安全性。由于抓手结构工艺复杂,目前抓手等典型承力件设计主要依赖于经验和实物测试,对其载荷扩散机理理解还不透彻,缺乏理论指导。
针对上述问题,本文旨在通过设计、分析和验证不同结构形式的抓手,探寻影响抓手载荷能力大小的因素,为浮空器囊体抓手结构设计提供参考和借鉴。
2 结构设计
2.1 结构功能简述
一般地,浮空器囊体上分布有若干抓手与拉索相连[12]。单个抓手结构包括张线、金属接头和基布。抓手与囊体连接处有开口缝,通过热合工艺在缝隙处将抓手布与囊体布胶合一体。抓手在浮空器囊体上的布置如图1所示。
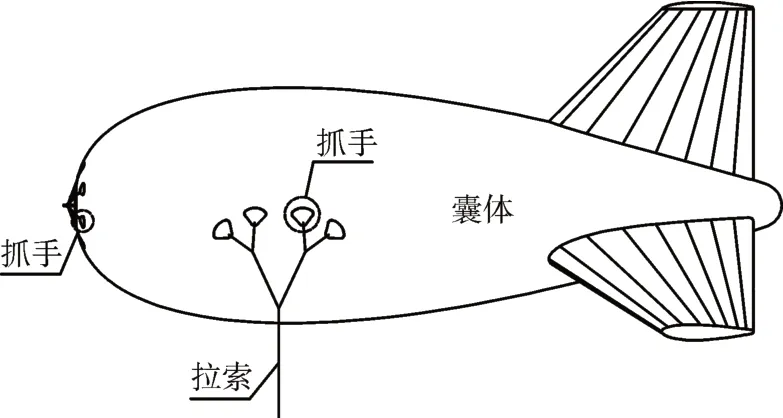
图1 抓手布置示意图
目前,抓手的常规外形为扇形,强力带呈V 形的发射状,载荷通过金属接头、强力带和基布逐步扩散至囊体,结构如图2所示。
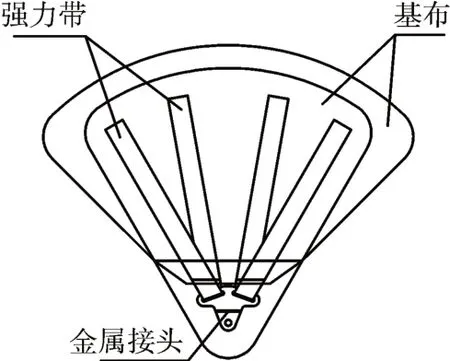
图2 原始抓手外形
在金属接头形式和材料相同的情况,基布的结构设计是影响抓手承载能力大小的的主要因素,包括基布形状、扇形弧度以及基布大小。基布的形状主要指抓手上边缘的外形,包括扇形、椭球形、波浪形等,设计的要素包括基布的形状以及强力带的长度的变化;在抓手重量相同的情况下,两层基布的相对大小不一样同样会影响抓手的承载能力。
2.2 形状优化
作用在金属接头的载荷通过依次通过强力带和基布传递至囊体上,相应地,集中载荷依次变为强力带上的分散载荷和基布上的连续载荷,载荷的集中程度逐渐降低。载荷扩散过程如图3所示。
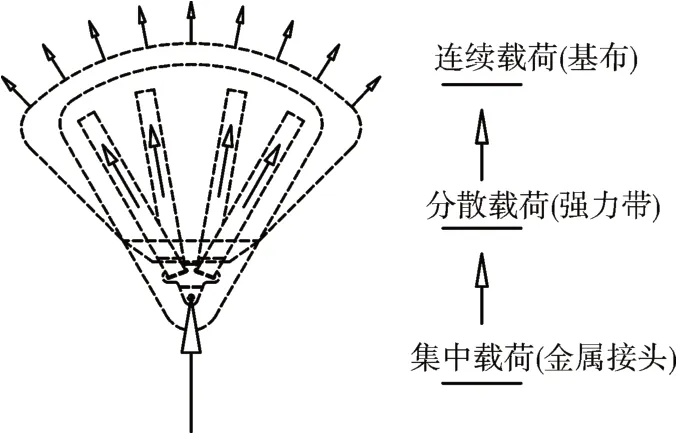
图3 载荷扩散路径
载荷传递的效率与强力带伸展的长度、夹角以及基布的形状有关。强力带分布的结构形式与金属接头的结构有关。为考察基布形状与强度的关系,保持强力带分布结构基本不变,仅改变基布的形状。基布的基础形状设为扇形,抓手受力后会在扇形基布顶端形成应力集中区。以往的测试经验表明,抓手试验件的破裂部位往往出现在该应力集中区域,因此,抓手基布形状改进的方向为改变顶部的弧度或外形,提高基布载荷分散转移的效率。
决定基布上缘形状的因素有边缘的整体弧度变化和边缘线的起伏变化。两种因素相互组合和形成不同的基布形状,主要变化有三角形、扇形、椭圆形、三角波浪形和扇形波浪形等五种形状,如图4所示。
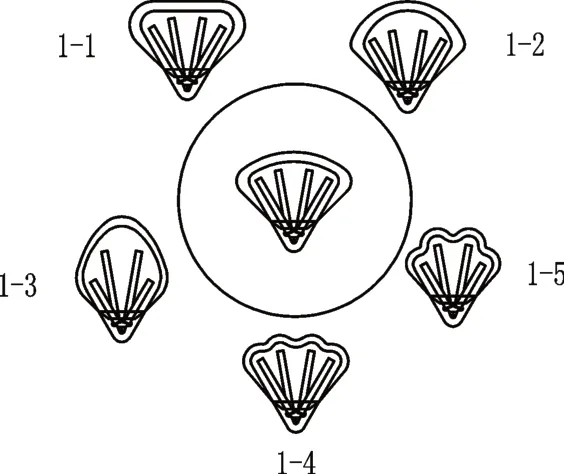
图4 抓手外形变化
其中1-1、1-2 和1-3 形式的抓手为在原始抓手外形基础上改变上缘弧度,主要考察基布上缘弧度变化对抓手承载能力的影响。1-4 形式抓手为改变原始抓手上缘的起伏变化,1-5 形式抓手则可看作是1-3和1-4的综合体。
2.3 铺层优化
抓手的基布一般由两层织物材料基布构成,强力带以缝纫方式固定在尺寸较小的基布上,而后该基布以粘接的方式固定到另外一层尺寸较大的基布上。为考察基布尺寸对载荷扩散的影响,调整抓手两层基布的大小,扩大与囊体连接基布(下层)的面积,同时缩小强力带的长度,保持抓手总重量基本不变,分析基布比例分配对承载能力的影响。
如图5,2-1 形式抓手缩小长度算短为原始长度的70%,基布面积增大约30%,而抓手2-2 基布增大25%,强力带则缩短为原始长度的80%。
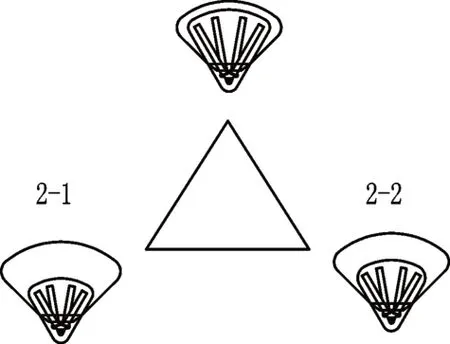
图5 抓手基布比例变化
三种抓手结构尺寸统计如表1所示。
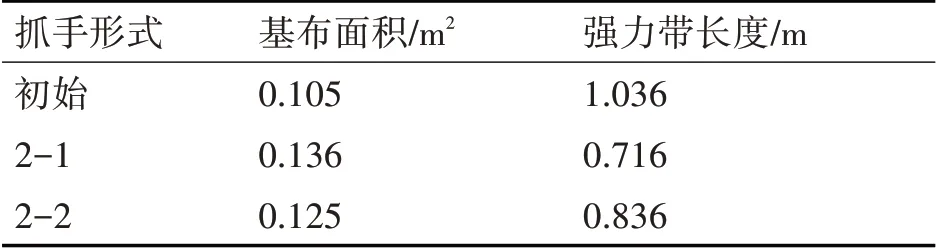
表1 抓手结构尺寸统计
3 仿真分析
3.1 建模
对抓手进行仿真分析的前提是建立相对准确的分析模型。抓手的结构和成型工艺较为复杂,同时采用了多种不同物理属性的材料,如何合理简化抓手结构和选择合理的材料参数是建立模型的关键。
在ABAQUS软件中建立抓手的仿真模型,包含抓手布、加强条、金属接头、囊体基布以及密封条,如图6所示。其中抓手和囊体布均采用薄壳单元[13],加强条采用大刚度梁,金属接头用MPC 连接简化。抓手布以及囊体布材料为一种聚氨酯涂层织物,仿真中将其等效为各向同性材料。囊体布材料的弹性模量取15GPa,泊松比0.4,撕裂破坏强度约为430MPa。将囊体基布的四周边界铰支约束,并在基布面内施加一定的预应力。
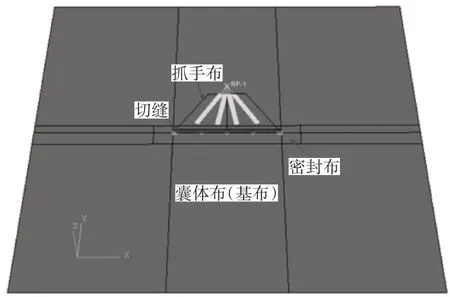
图6 抓手结构有限元模型
对抓手施加相同的面内载荷,方向为Y 向,大小为15kN。
3.2 仿真结果及分析
理论上增大抓手基布面积会提高抓手的承载能力,但由于浮空器对结构重量异常敏感,系统重量冗余会导致平台搭载设备的能力。因此,抓手优化不能依靠无限制增加抓手基布面积。为评估抓手优化的效果,对比维度必须统一,在这里引入了“改善效率”的概念。改善效率是指基布单位面积增加量带来的应力下降率。通过类归一化处理就可以有效评估抓手的优化效果。
1)基布形状优化
五种形状优化抓手应力云图分布如图7所示。
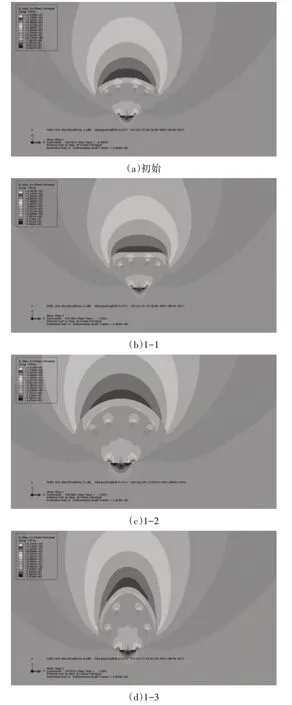
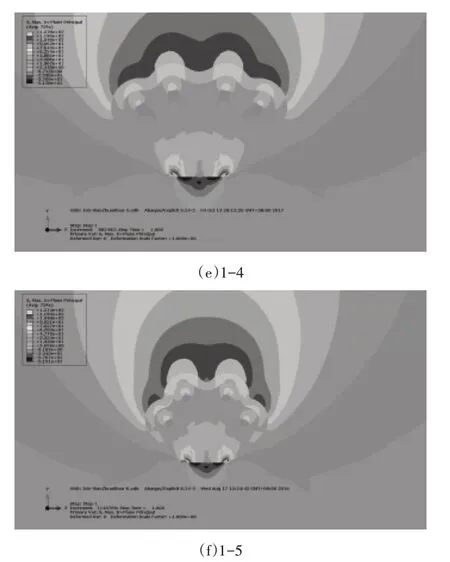
图7 形状优化抓手应力分布
可以看出,应力集中区域均出现在抓手基布的上边缘,且已中点为中心呈扇形分布;总的趋势为基布面积增大,囊体上的应力水平会相应降低,即基布增大有利于载荷的扩散,如抓手1-1 和抓手1-2 基布顶端;从初始抓手、1-2 抓手和1-3 抓手可以看出,基布上边缘弧度隆起,囊体上的应力水平先降低后升高,即基布边缘曲率半径存在最优解,并非越小越好;相对于连续的弧形边缘,波浪起伏的基布边缘更有助于降低囊体应力水平,如抓手1-4。
抓手的改善效率如表2所示。
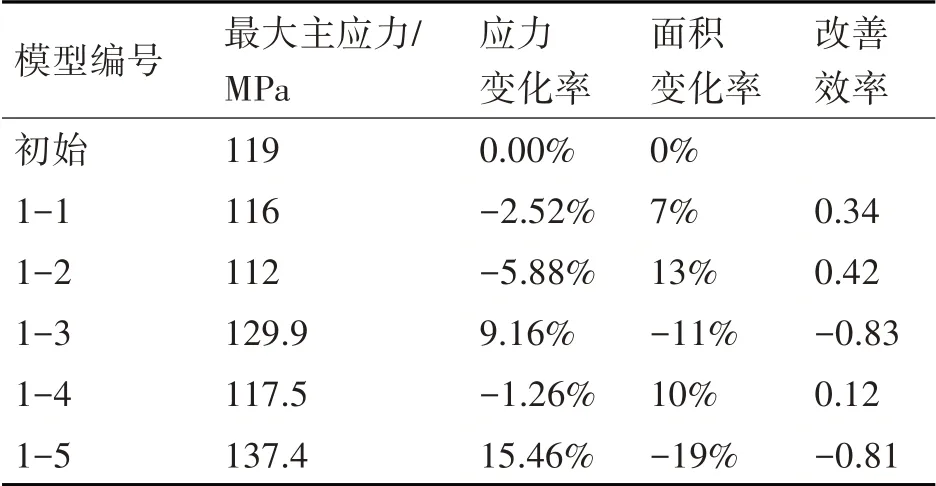
表2 形状优化分析结果
仿真分析结果表明:适当减小抓手上缘曲率半径和采用波浪形边缘更有利于载荷的扩散,提高抓手的承载能力。
2)基布铺层优化
两种铺层优化抓手应力云图如图8所示。
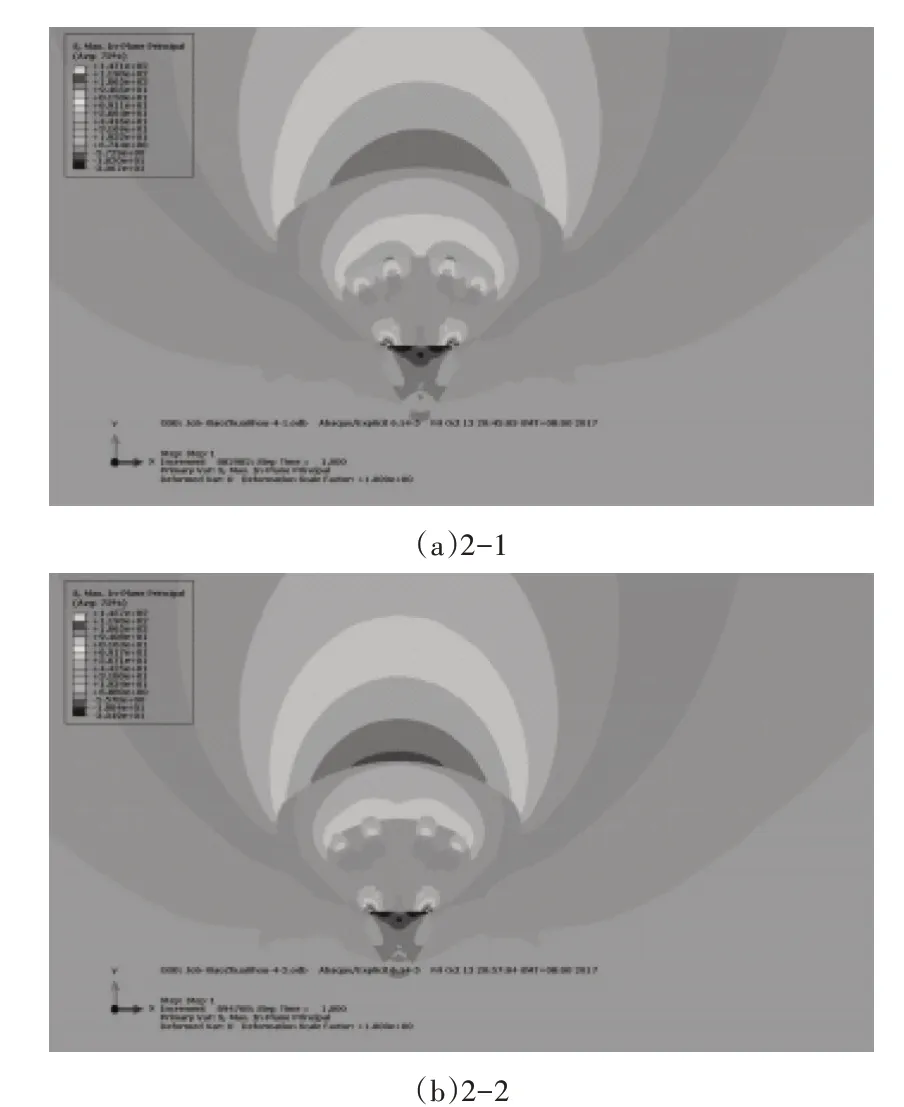
图8 铺层优化抓手应力分布
通过上述的分析可以看出,抓手加载产生的应力云图形态与基布边缘形状有关,由于抓手2-1 和抓手2-2 基布上缘的曲率相同,应力云图形状基本一致。由于抓手2-1 的强力带相对抓手2-2 较短导致应力带顶端的应力水平较高,进一步说明了强力带长度是影响载荷扩散的重要因素。尽管抓手2-1 的基布大于抓手2-2,但前者上缘的应力水平却高于后者,说明基布的大小并不是影响载荷扩散的唯一因素。初始抓手以及抓手2-1 和抓手2-2的应力统计见表3。
仿真分析结果表明:抓手2-2 应力水平降低幅度较大,即增大强力带扩散范围相对增大基尺寸更有利于提高抓手承载能力。
4 试验验证
选取初始、1-3、1-4、2-1、2-2 五种抓手进行实际拉伸破断强度试验,试验结果如图9和表4所示。
结果显示,抓手的破断部位均为抓手基布上缘,与仿真分析的应力集中区域一致。
抓手实际破断强度变化趋势与仿真分析基本一致,说明仿真分析结果有效可信。

图9 抓手破断试验

表4 抓手破断强度试验结果
5 结语
抓手是浮空器最为常用的柔性结构件之一,其承载能力直接影响浮空器产品的工作性能和结构安全性。由于抓手的结构工艺复杂,涉及的材料众多,建模困难,设计通常依赖于经验和试验测试,本文分析了基布形状和铺层对抓手承载能力的影响,通过仿真分析与试验测试可得到如下结论:
1)抓手承力基布采用波浪形可有效提高抓手承载能力;
2)增大强力带扩散范围(即长度)更有利于提高抓手承载水平。
