载荷探测器像元满阱参数测试
2022-08-02黄书华司福祺
常 振,王 煜,林 方,赵 欣,黄书华,司福祺
(1. 中国科学院 合肥物质科学研究院 安徽光学精密机械研究所环境光学与技术重点实验室,安徽 合肥 230031;2. 安徽大学 物质科学与信息技术研究院 信息材料与智能感知安徽省实验室,安徽 合肥 230039)
1 引 言
星载大气痕量气体差分吸收光谱仪(Environment Monitoring Instrument,EMI)是我国首台用于大气污染监测的星载高光谱载荷,数据产品精度优于97%,在空间分辨率和反演噪声上都显著高于OMI(Ozone Monitoring Instrument)卫星产品,相关性系数为0.96。该载荷填补了国产卫星探测全球及区域大气污染物分布的空白,可为大气污染防治、全球气候变化管理等提供有力的数据支撑[1-2]。为了进一步提升国产卫星探测全球大气污染分布的能力,实现更高空间分辨率的对地探测,新型号载荷使用了全新探测器,对地观测空间分辨率达到7 公里,临边对地空间分辨率为2 公里,这一分辨率精度对污染源位置辨识、排放通量计算等有着重要作用[3]。
新型号载荷使用深势阱的科学级电荷耦合器件(Charge-Coupled Device,CCD),可提供相对于EMI 更高信噪比数据,从而提供更精确的污染物浓度分布数据。目前,国内尚无使用该探测的案例,作为国内首次使用该探测器的载荷,在成像电路的开发过程中需要对其电子学关键性能——满阱容量(Full Well Capacity,FWC),即满阱电子数进行测试及验证,以确认探测器电子学系统处于最佳状态。虽然CCD 在出厂时标注了满阱参数,但是由于CCD 驱动电路的设计参数如水平及垂直转移时钟的频率、驱动电流等均会影响CCD 的满阱性能,因此在成像电路的研发过程中,需要不断调整参数并测试CCD 的满阱,以寻找最优满阱性能对应的参数组合。参数的调整过程中有时需要进行几十次甚至上百次满阱测试,因此需要简单可行的满阱测试方法以提升CCD 成像电路的研发效率。
CCD 成像系统满阱性能的测试通常采用光子转移曲线(Photon Transfer Curve,PTC)法,该方法可通过简单的方法获取CCD 的读出噪声、系统增益、满阱电子数和像元响应非一致性(Photo Response Non Uniformity,PRNU)等重要参数。PTC 是一种起源于国外的较为公认的CCD 多项参数测试方法。国内的有关科学级CCD 成像技术的研究多基于卫星载荷项目等[4-5],民用及实验室大都采用市场现有的CCD相机搭建成像系统[6-8],因此,PTC 法是一种应用广泛且可靠的CCD 成像系统满阱测试方法[9-10]。当CCD 的满阱输出未达到成像系统模数转换(ADC)的量程时,可采用EMVA1288 标准定义计算满阱电子数,即根据DN 值方差和辐射量关系曲线的3%或5%线性拟合偏差作为饱和点,但是这一人为选择因素很可能给测试结果带来较大偏差。
由于PTC 方法测试系统复杂,在CCD 成像电路的研发过程中,每次测试使用PTC 方法进行满阱测试的效率较低。本文构建了一种简易的测试方法——LED 点测试法。该方法使用LED 光源作为目标光源获取数据,结合PTC 法获取的增益参数,计算得到CCD 的满阱容量。由于CCD 驱动信号时钟参数的改变不会影响成像系统增益,因此研发过程中只需进行一次PTC测试获取系统增益,后续驱动信号的调整仅使用LED 点测试法即可获得探测器满阱数值。通过实验验证了LED 点测试法的可行性和准确性,与传统的CCD 成像系统满阱测试法相比,LED点测试法基于对像元溢出物理过程的分析,更符合像元满阱的物理学定义,更接近像元满阱的真实情况,可信度更高。该方法可作为简易条件下快速测量CCD 满阱的通用性方法,大幅提升CCD 成像电路的研发效率。探测器满阱性能的测试结果可为后期载荷数据反演提供有力的数据支撑。
2 原 理
2.1 PTC 方法
CCD 的基本结构是由许多MOS 管组合而成,MOS 管内部有电势垒可保存电荷,保存电荷的多少与晶体掺杂浓度、静态工作的供电电压等有关[11]。光线照射到CCD 的感光区域可产生光生电子,在时序电压的驱动下,产生的电子通过MOS 管内部的载流子耦合可实现转移。同一光强CCD 产生的光生电子数并非常量,而是呈现一定的随机分布,单位时间内入射光产生的光生电子数可认为服从泊松分布。根据泊松分布理论,CCD 收集的电子数目的平均值μ和噪声σ的关系如下:

对于深势阱的科学级CCD,由于散粒噪声随光强的增大而增加,因此在一定光强下,可将它作为系统的主要噪声,忽略暗电流噪声、读出噪声、电源噪声等不随光强变化的噪声[12]。根据CCD 的工作原理,CCD 像元搜集到的电荷可转换为电压信号,电压信号经读出电路、偏置电路和采样电路转换为数字信号。CCD 成像系统将电子数转换为DN 值的过程包括两个重要参数:电子数转换成电压信号的增益η和电压经读出电路及采样电路转换为DN 值的增益k。假定整个系统电子数到DN 值的变换是线性的,则此处可定义系统增益g,单位是DN/e-,表示像元搜集的平均电子数与DN 值的关系。于是有:

其中:μDN-signal表示像元DN 值的平均值,μE-signal表示像元搜集到的电子数的平均值,B表示系统偏置。同理,像元搜集到的电子数的噪声部分σE-shot-noise也符合系统增益的定义:

其中:σDN-noise-shot表示像元搜集到的电子数在单位时间内带来的DN 值波动,即散粒噪声,与式(2)不同,噪声部分是不包括偏置的。获得的DN 值噪声中还包括电路的读出噪声、电源噪声等,这些噪声与CCD 获取的光强无关,可统计为读出噪声σread-noise,根据噪声的叠加原理,系统总噪声σtotal可表示为:

结合式(1)~式(4),有:

式(5)即PTC 的原理公式。
根据上述公式可得到PTC 曲线,如标准差-平均值对数曲线、方差-平均值曲线等。
国内外基于PTC 技术对CCD 的成像过程进行了大量研究。李洪博、董岩、刘云清等提出了一种可提高相机动态范围的图像融合方法,使用PTC 技术分别测得了高、低增益下CCD 成像系统的PTC,并根据曲线的线性部分得到了图像融合阈值,实现了相机动态范围的提升[13]。冯婕、李豫东、文林等使用PTC 技术对辐照前后探测器的性能进行了测试,发现辐照导致转换增益发生 了7.82% 的 退 化[14]。Qiang Wen,Siqi Zhu,Shichang Liu 等使用神经网络算法对PTC 的非线性区进行校正,提升了图像传感器的线性范围和图像对比度[15]。Deyan Levski,Martin Wany,Bhaskar Choubey 提出了一种在使用PTC 技术进行CMOS 传感器性能测试时补偿信号相关读出噪声的方法,优化了利用PTC 求取读出噪声的算法[16]。PTC 方法也存在一些缺陷,通常需要搭建平场面光源(如使用积分球等设备),测试系统结构复杂,事实上由于CCD 对光的响应极为敏感,使用一般的积分球最低亮度照射CCD 也会发生饱和,为此定制了低照度积分球进行测试。PTC 方法的前提是光源为绝对的平场,这是因为该方法事实上是以空间维噪声作为时间维噪声,因此需要所有像元接收相同亮度的光,对测试环境的杂散光要求较高。使用PTC 方法有时并不能得到理想的曲线,尤其对于科学级CCD,像元相关性等因素使PTC 在线性区会发生非正常弯曲 现 象[17-18]。另 外,由 于PTC 方 法 采 用 统 计 方法计算CCD 满阱,无法得到单个像元的满阱数值。
2.2 LED 点测试法
根据CCD 原理,CCD 像元的主要结构是MOS 管结构,光线照射到像元的耗尽区诱发电子能级跃迁产生新的电子-空穴对,可理解为光生电荷。光生电荷在像元势阱的作用下聚集于像元电极下,当光线增强,光生电荷量增多接近CCD 满阱电子数,像元势阱不足以束缚所有电荷时,该像元位置处的电荷将部分被周围像元所捕获,即向周围溢出。电荷首先会向相邻像元溢出,导致其电荷数量增多,继续增加光强,像元势阱被电荷填满,将不具备继续收集电荷的能力,电荷量不再上升,附近像元也会随着光强的继续增强达到饱和。根据这一原理,可使用点光源照射CCD 成像系统,使点光源在CCD 上聚焦于一个像元之内,通过研究该像元的成像情况即可测得该像元的满阱电子数。
构建绝对的点光源系统,需要平行光管、星点板、数值孔径匹配的镜头等设备,成本较高。为了简化测试过程,本文使用LED 点测试法,即使用LED 作为光强可调的点光源,结合普通的成像镜头使LED 点光源在CCD 图像中覆盖3×3 个像元区域,面积为78 μm×78 μm。通常CCD会首先在横向或纵向相邻的像元溢出,则LED点光源图像中的横向或纵向3 个像元的DN 值如图1 所示。图1(a)为LED 点在水平或垂直3 个像元中的成像示意图,图1(b)为随着光强的增大3 个像元DN 值的变化规律。

图1 LED 点测试法示意图Fig.1 Schematic of LED-point test method
图1(b)中,区域(1)是线性增长区,此时3 个像元均未达到满阱,随着光强的增大,3 个像元的DN 值同步增强,具体规律应符合高斯曲线的增长规律;当b像元接近满阱时,其搜集电荷的能力减弱,光生电荷被临近像元捕获的可能性增大,此时b的增长曲线逐渐放缓,临近像元的增长曲线开始加快,通常读出方向一侧的像元a稍早进入区域(2),即满阱区;继续增大光强,此时b像元达到饱和,数值不再上升,随后a,c像元也达到饱和,即区域(3)。在满阱区,对图1(b)中率先受到溢出影响的像元DN 值变化趋势进行多项式拟合,根据多项式拟合曲线结果可求取图1(b)中该像元曲线的拐点,根据满阱区的拐点对应的DN 值,结合系统增益,即可得到CCD 在该点像元的满阱电子数。
需要注意的是,CCD 可能存在坏像元(一般高等级的CCD,坏像元数量极少),测试时应避开(通过不同亮度的平场图像可直观看到坏像元)。上述方法获取的是CCD 单个像元的满阱数值,由于CCD 的PRNU 参数表征了像元之间对同一光强的响应差异性,通常不大于3%,文中所述载荷CCD 的PRNU 仅为0.643%,因此使用单个像元的满阱数值作为CCD 的满阱参数时,其偏差不大于0.643%。为获取不同像元的满阱数值,调整LED 光源在物平面的位置进行重复测试即可。为了获取更深的势阱和更大的像元有效感光面积,科学级CCD 通常不做抗溢出结构,文中所述探测器即不具有抗溢出结构。对于采用了抗溢出设计的CCD,其LED 点测试法的数据会有所不同,不会出现相邻像元DN 值的迅速增大现象,因此使用这一方法可以看出CCD 是否具有抗溢出设计。对于采用了抗溢出设计的CCD,LED 点测试法的测试数据同样可用于成像电路研发过程中的满阱计算,可参考传统满阱测试法,找到中心像元线性偏差为3%的像素值作为满阱DN 值,再结合增益即可获取满阱电子数。
3 实验及结果分析
本文分别采用PTC 法和LED 点测试法对载荷探测器满阱性能进行了实验,并采用传统饱和灰度值方法计算满阱容量作为对比。为了获取完整的实验数据,实验采用光源可调的测试方法,分别搭建了图2 所示的两种测试系统。图2(a)为PTC 测试系统,图2(b)为LED 点测试系统。为了降低光源不稳定性带来的误差,测试中使用了高稳定性电源且数据采集时将多幅平均结果作为测试数据。

图2 载荷探测器成像系统测试框图Fig.2 Schematics of detector imaging system test of spaceborne detector
3.1 数据采集
在PTC 测试实验中,为了快速获取更多的测试数据,搭建了图2(a)所示的测试系统,并获取差分图像,具体步骤如下:
(1)调整积分球光源强度,获取两幅平场图像,分别记为Flat_A,Flat_B;
(2)将两幅平场图像相减得到差分平场图像,记为Diff_AB;
(3)选取图像中相对平坦的中间区域的200×200 个像元,求取Flat_A,Flat_B 中在该区域所有像元的平均值,记为μ1;
(4)求取差分平场图像,Diff_AB 在步骤(3)所述区域中所有像元的方差,记为;
(5)更改积分球光源强度,重复步骤(1)~(4)获取不同光强下的μi和,(i=1~N,N表示所有光强等级数量);
(6)将载荷调整工作模式为0 s,获取2 幅图像,求取(3)所述区域中所有像元的平均值作为系统偏置,记为B;
(7)绘制所有数据点,以μi-B作为横轴,作为纵轴,绘制PTC 曲线。
根据概率分布理论,当随机变量X与随机变量Y相互独立时,其差的方差D(X-Y)=D(X)+D(Y)。上述步骤中,获取的两幅平场图像实际上是服从同一分布的随机变量的两次采样,两次采样相互独立。使用样本方差作为随机变量方差的估计时,也符合方差公式。因此,差分图像的方差应为平场图像方差的2 倍,即步骤(7)中计算得到的方差需要乘以1/2。
搭建图2(b)所示的LED 点测试法测试系统,以测量CCD 某个像元的满阱电子数,具体步骤如下:
(1)调整LED 的电压为U1,点亮LED,调整镜头焦距及LED 与探测器的距离,使LED 在CCD 图像上聚焦为一个亮点,占据3×3 的像元面积;
(2)观察LED 照亮像元对应的DN 值分布,调整其位置,使DN 值分布符合图3(a)中的规律,即左右及上下像元的DN 值相近,获取16 幅图像,计算9 个像素点在16 幅图像(或更多)中的DN 值的平均值;
(3)依次改变LED 电压为Ui,获取不同的光强等级,选取光强等级的原则为在饱和点附件选取更多的点,以减小数据拟合误差,重复步骤(2),获取9 个像素点在不同光强下的数据,分别记为P1i,P2i,……,P9i,(i=1~M,M为所有光强等级数量);
(4)以 电 压Ui为 横 轴、像 元DN 值P1i,P2i,……,P9i为纵轴绘制3 条曲线,选取合适范围进行多项式拟合得到关键曲线拐点及其对应的中心像元DN 值,该值即为中心像元达到满阱时对应的DN 值。
3.2 结果及分析
3.2.1 PTC 测试结果
按照上述方法,得到载荷探测器在全幅工作模式下的标准差-平均值对数PTC 如图3 所 示,方 差-平 均 值PTC 如 图4 所 示。

图3 全幅工作模式下的标准差-平均值对数PTC 测试结果Fig.3 Test results of standard deviation-mean logarithm PTC in full frame mode
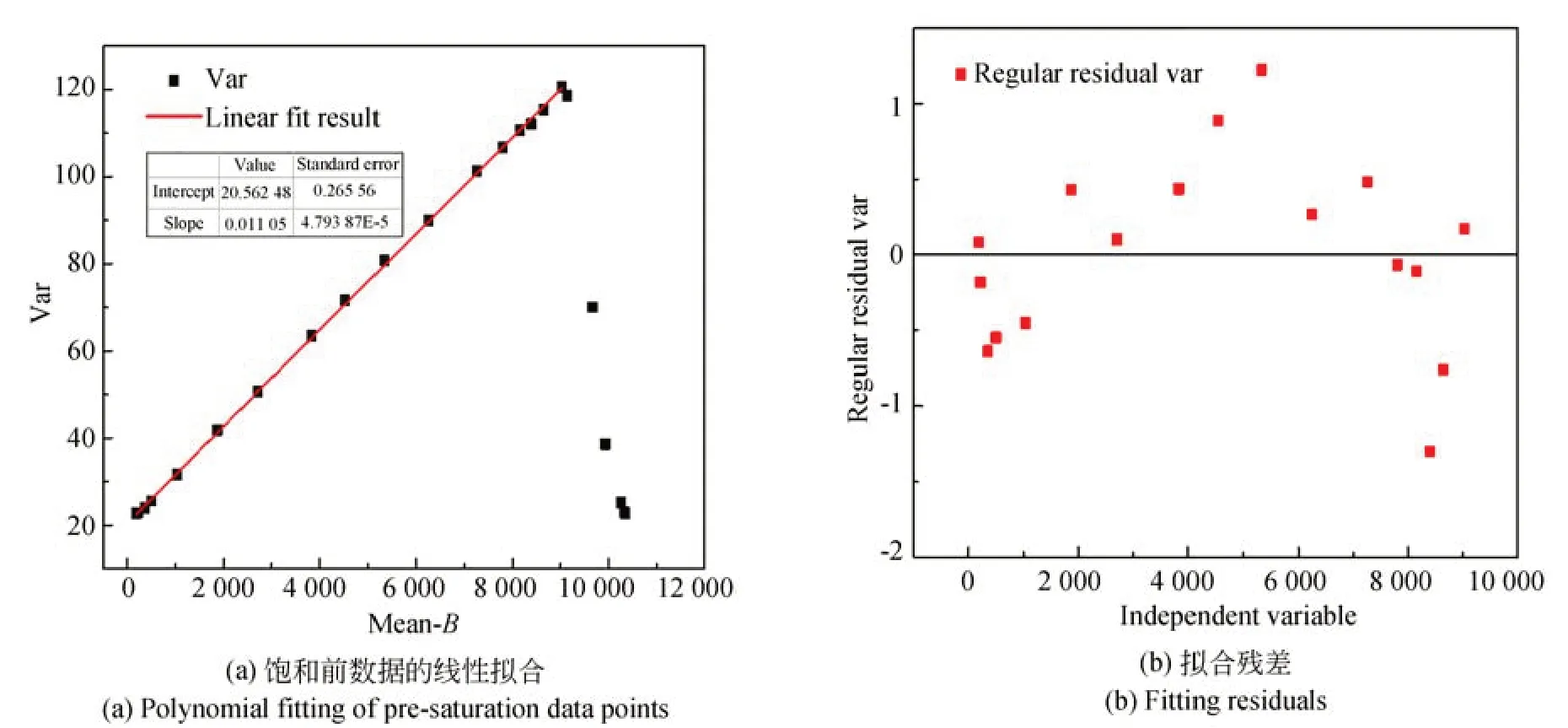
图4 全幅工作模式下的方差-平均值PTC 测试结果Fig.4 Test results of variance-mean PTC in full frame mode
对图3(d)中的拟合曲线求导,得到其斜率为0 的 点 为(1.97,0.676 34),对 应 的 标 准 差 为4.762DN,即电路的读出噪声(与光强无关的噪声)为4.762DN。对图3(a)中数据的饱和值点(即最高点)之前的数据进行线性拟合,结果如图3(b)所示,斜率为0.386,这与理论值0.5 不符,但是可以看出,随着Log(Mean-B)值的增大曲线斜率呈增长趋势,这说明散粒噪声在总噪声中的比重不足,因此不适合用该曲线来计算成像系统增益。对数PTC 曲线在起始阶段呈现明显的水平趋势,所以可用来测算成像系统的读出噪声。CCD 的读出数据中包含Pre-scan 和Over-scan 的读出像元,选取Pre-scan 和Over-scan 区域的像元进行平均值和方差的计算,得到此区域像元的平均值为522.4DN,方差为21.22DN2。此结果与PTC 曲线得到的读出噪声偏差不大,实际中可使用Pre-scan 和Over-scan 快速获取载荷的读出噪声。
对图4(a)数据进行线性拟合,斜率为0.011 05,即成像系统增益g=0.011 05;数据最高点对应的Mean-B 数值为9 036DN,其对应的电子数即为CCD 像元满阱电子数为817.738 ke-。由于方差-平均值曲线中的截距拟合结果误差较大,此处取标准差-平均值对数曲线中的拟合结果,即4.762DN 作为读出噪声,具体载荷探测器的满阱参数测试结果如表1 所示。

表1 载荷探测器满阱性能的PTC 测试结果Tab.1 PTC test results of detector in satellite payload
3.2.2 LED 点测试结果
根据2.2 所述方法获取LED 点测试数据,得到LED 点在CCD 中的成像结果,如图5 所示。由图5(a)可见,在LED 光强增加的过程中,中间像元DN 值迅速增大,上下两侧像元率先于水平方向两侧像元开始增大。图5(b)可直观看出LED 点光源在CCD 垂直方向(帧转移型面阵CCD 像元的读出过程一般包括帧转移和水平转移过程,帧转移有时也称垂直转移,沿垂直方向溢出,即是沿帧转移方向溢出)率先溢出。

图5 LED 点测试法测试图像Fig.5 Test images of LED-point method
根据CCD 的像元搜集电荷的原理,CCD对光生电荷的约束是依靠像元MOS 管结构的电势垒和电势阱,随着CCD 像元搜集的电荷数的增加,接近像元饱和时,该像元结构搜集电荷的能力发生变化[19],此时临近像元会收集到更多的电子。根据帧转移型CCD 的工作原理,CCD 帧转移方向为垂直方向,像元读出方向为水平方向[20],因此饱和后的像元在水平或垂直方向上率先发生溢出[21],而且是临近的某一个像元受到溢出影响最大,即DN 值会迅速上升。
图6 所示为LED 点亮的9 个像元在不同光强下DN 值的增加趋势。图6(a)为像元DN 值走势图,可看出LED 点光源投影到CCD 像元上后的电荷向周围溢出过程:在中心像元未饱和之前,其DN 值的增长与LED 电压的增加呈线性比例(由于低电压处LED 亮度稳定性差,因此在低DN 值区域成像部分波动,但对满阱容量的计算并无影响,因为像元不可能在低值处饱和);当中心像元接近饱和时,临近的下方像元首先收集到中心像元区域的电荷,其DN 值迅速增长;光源继续增强,上方临近像元开始收集到中心像元区域电荷;当中心像元饱和溢出时,周围像元开始受到影响。

图6 LED 点光源法的测试结果Fig.6 Test results of LED-point method
按照像元饱和过程,可选取首先受到中心像元饱和影响的像元(down_center pixel)DN 值变化做分析。如图6(b)所示,计算得到down_center 像元在转折区域附近拟合曲线的拐点为(2.09,1 517),该点对应的中心像元DN 拟合曲线的拟合值为9 562,即该像元发生饱和时对应的DN 值。PTC 方法得到的去除偏置的饱和DN值为9 036,LED 点测试法扣除偏置值522.4 后对应的DN 值为9 039.6,其对应的满阱电子数即为818 063e-。两者的误差仅为0.039 7%,证明LED 点测试法的准确性。进一步地,通过调整LED 点光源的位置,可获取CCD 成像面上不同像元的满阱参数。4 个不同像元采用LED 点测试法的测试结果如图7 所示。


图7 不同像元的LED 点测试结果。(a1)、(b1)、(c1)、(d1)为每次测试中LED 照亮的9 个像元的DN 值随光强增长的情况;(a2)、(b2)、(c2)、(d2)为中心像元和溢出像元的DN 值,对溢出像元DN 值数据进行非线性拟合得到曲线拐点并求得该点在中心像元曲线中对应的DN 值Fig.7 Test results of 4 different pixels.(a1),(b1),(c1),(d1)Trend map of the 9 LED pixel values under different light intensities;(a2),(b2),(c2),(d2)The inflexion point of the curve obtained by nonlinear fitting the overflow pixel DN value data,and the corresponding DN value of the point in the center pixel curve
综上,采用LED 点测试法获取的5 个像元测试结果如表2 所示。可见,每个像元饱和DN 值相对平均值的偏差也符合出厂参数中的PRNU参数0.643%。
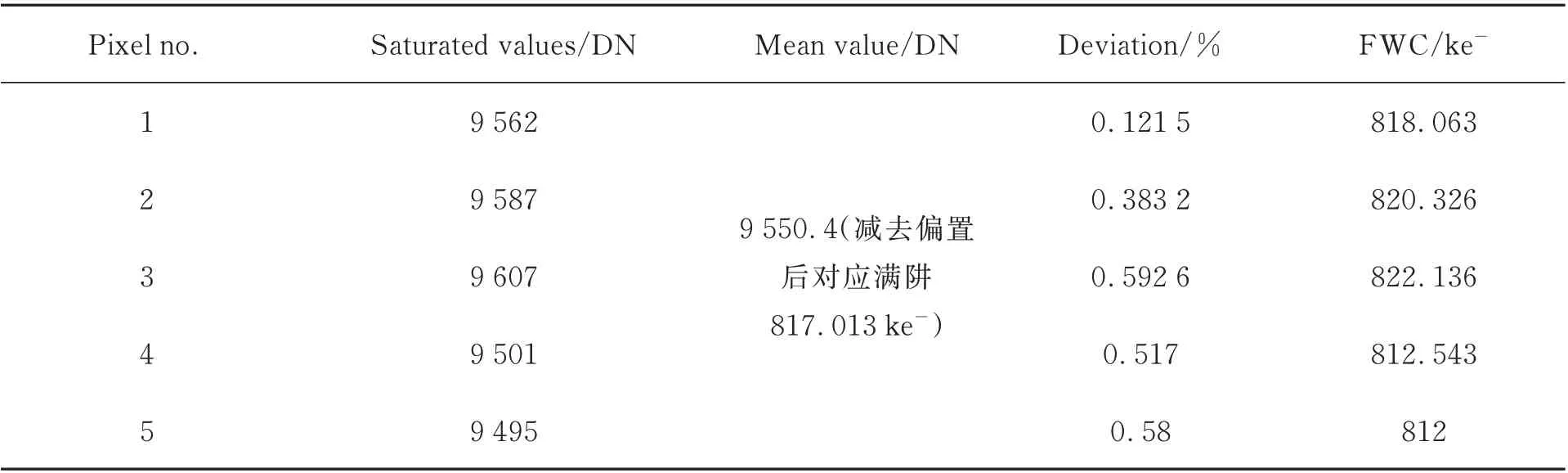
表2 探测器LED 点测试法的测试结果Tab.2 Test results of detector with LED-point test method.
3.2.3 传统方法的测试结果
根据EMVA1288 标准的CCD 成像系统满阱测试法,即传统测试方法,首先需要求取成像系统的饱和DN 值,然后通过线性拟合得到饱和值。随着光强的增大,成像系统获取的DN 值在像元饱和前呈线性增长,接近饱和及发生溢出后DN值随光强的变化会变缓并最终停止增长。对线性区进行拟合,计算像元DN 值与该线性拟合结果的误差比例,使得该误差比例达到5%或3%时的像元DN 值为饱和DN 值。为了对比LED点测试法与传统满阱测试方法,对中心像元的DN 值采用传统方法进行处理,结果如图8 所示(彩图见期刊电子版)。
图8 中,三角形符号为中心像元随光强的变化趋势,在其上升区进行线性拟合,拟合直线如红线所示,方形符号曲线为线性拟合误差比例。初始阶段由于电压较低,LED 光源波动较大,因此拟合误差也会偏大,但并不影响计算结果。当误差比例在转折区域上升为3%和5%时对应的中心像元DN 值分别为9 728 和9 985,其对应的满阱电子数即为880 362e-和903 620e-。该结果与PTC 方法的测试结果偏差分别为1.9% 和4.7%,电子数偏差则为62.624ke-和85.882ke-。可见,这一方法误差较大,且选取不同拟合误差比例作为满阱定义存在较大区别。同型号芯片在不同实验组测试中可能选取不同定义,得到无法统一的数据结果。

图8 传统满阱测试方法的LED 点测试结果Fig.8 Test result of LED point using traditional FWC test method
4 结 论
LED 点测试法基于像元饱和过程的物理现象和原理,是一种获得CCD 像元满阱电子数的简易方法。使用LED 点测试法对载荷探测器的多个像元进行多次测试,得到满阱电子数平均为817.013ke-,与PTC 法的测试结果817.738ke-,偏差仅为0.088 7%;针对单个像元的LED 点测试数据,分别采用LED 点测试法和传统的满阱测试方法进行测试,其结果与PTC测试结果的误差分别为0.039 7% 和1.9%,从而验证了LED 点测试法的准确性。使用单个像元的满阱电子数作为CCD 满阱参数时,其偏差不大于0.643%,即文中所述载荷探测器的PRNU 出厂参数。综上,LED 点测试法作为简易条件下CCD 满阱测试方法,具有较高的准确性和可靠性,可大幅提升CCD 成像电路的研发效率。
