油缸驱动同步伸缩臂结构优化设计
2022-08-02张海潮
1 引言
擦窗机可说是从起重机械发展而来的,部分擦窗机实际是门座式起重机的小型化 ,但它又结合了其他许多实际运用中的机械设备。2000年以后,由于我国城市化建设的发展很快,越来越多的城市注意到通过美化建筑来增添城市的美感,于是高层和超高层建筑如雨后春笋般充斥了各大中小城市,这也使得社会对擦窗机的需求得到进一步提升。但是在传统擦窗机的设计过程中面临耗时长,工作力度大,重复性高等诸多设计困难,并且分析擦窗机的结构特点可知,擦窗机的各总成之间还是存在一定的关系,这就为擦窗机参数化的设计提供了可能。
2 臂的长度计算
参考俯仰式同步伸缩擦窗机臂的设计方法以及擦窗机在实际应用中需要满足的一些功能,我们通过研究共总结了五种结构形式,这五种结构形式即满足了擦窗机所有的设计要求:1.臂最长且充分利用;2.臂最长,优先紧凑;3.臂前端紧凑且最轻;4.臂前端紧凑且优先紧凑;5.臂两端紧凑。
深化双联在“家”中。为人大代表联系群众和群众约见代表提供预约和场所服务,架起代表联系群众的“连心桥”;发挥“泰安市人大代表履职网络平台”作用,实现代表与人民群众的在线互动交流,拓展联系群众的广度和深度。
2.1 伸缩臂最长且充分利用的长度计算
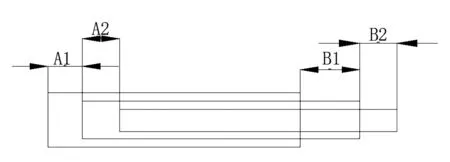
该方案极限状态中各级臂完全按照搭接系数进行摆放,各级臂无富余量,不过伸缩臂前后两端不能保证紧凑状态即Bi≥Bi、Ai≥Ai。该计算公式是由裁剪方式进行确定。裁剪方式分为两种:1、当在分段裁剪区间内,根据Bi和Ai的情况确定哪些臂可以进行裁剪而不影响行程S,为了保证最大裁剪量,我们可以确定各级臂裁剪的优先级(Ln-1>Ln-2>...>L1>Lz),每一次循环都对某节臂裁剪了1mm,直到最大值等于用户要求的Lmax时停止循环;2、当在同时裁剪区间内,这时裁剪改变行程S,各级臂裁剪量由搭接系数决定,裁剪后各级臂无富余量,臂充分利用。如图1所示
教学设计一将教学目标设定为把握文章表现人物的艺术手法和品味文章形象、生动、酣畅淋漓的语言,这是将《贝多芬百年祭》视为“例文”,强调文本学习是对一个个词句以及整篇文字所体现的词法、句法、章法等共同的法则和共通的样式的学习。
2.2 伸缩臂最长且优先紧凑的长度计算
扎西次仁,1980年10月生,男,藏族,西藏日喀则人,硕士,西藏藏医学院副教授,研究方向为藏语言文学。
2.3 伸缩臂前端紧凑且最轻的长度计算
将之前推导的长度计算公式在VS2010平台C#环境下用程序实现,对强度计算的页面进行优化,实现不同工况下危险截面的校核以及臂轻量化设计,使用户操作步骤更少,软件使用起来更加方便智能化。
2.4 伸缩臂前端紧凑且优先紧凑的长度计算
该方案极限状态中在缩回状态时各级臂保证前端紧凑(Bi=Bimin),然后各级臂同时往前伸,当其中一级臂满足搭接系数时停止运动。这时只有某一级臂满足搭接系数,其余的臂都有富余。该方案计算公式是由裁剪方式进行确定。裁剪方式:1.分段裁剪区间内,这时Bi=Bimin,Ai≥Aimin,这时候裁剪只对Ai进行裁剪,直到裁剪到Aimin停止。(为了保证两端紧凑,各级臂的搭接系数≥Kmin)。2.共同裁剪区间内,该状态Bi=Bimin,Ai=Aimin。为了保证裁剪后伸缩臂两端一直处于紧凑状态,共同裁剪时每一次循环所有的臂都减少相同距离,直到最大值满足用户的要求。
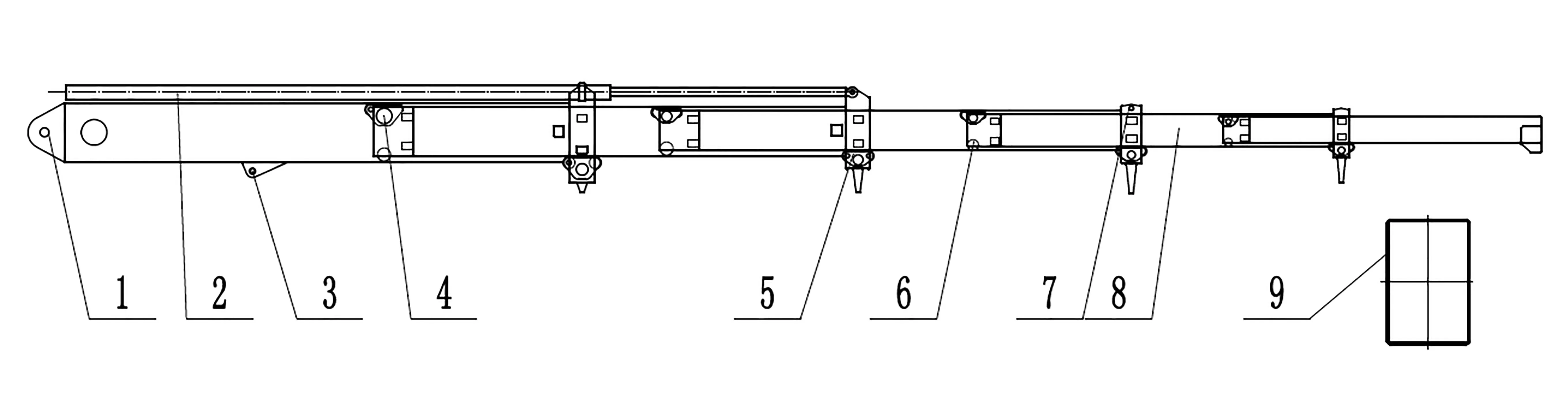
参考起重机多级臂同步伸缩设计原理,规划油缸驱动同步伸缩擦窗机的伸缩臂方案设计,先使用CAD简图来画出同步伸缩臂的伸缩原理图,并将同步伸缩臂上的链条传动或者钢丝绳传动统一放在臂的上端。如图2所示。
2.5 伸缩臂两端紧凑的长度计算
该方案在极限状态中缩回状态时各级臂保证伸缩臂前后两端都处于紧凑状态(Bi=Bimin,Ai=Aimin),然后各级臂同时往前伸,当其中一级臂满足搭接系数时停止运动。这时只有某一级臂满足搭接系数,其余的臂都有富余。该方案计算公式是由裁剪方式进行确定。共同裁剪:该状态Bi=Bimin,Ai=Aimin。为了保证裁剪后伸缩臂两端一直处于紧凑状态,共同裁剪时每一次循环所有的臂都减少相同距离,直到最大值满足用户的要求。
3 油缸驱动同步伸缩擦窗机臂的设计
3.1 同步伸缩臂设计原理
通过查找文献,参考起重机伸缩臂设计方法,为油缸驱动同步伸缩擦窗机的设计做知识储备。根据相关资料来推测油缸驱动同步伸缩擦窗机设计原理,然后参考教研室直臂式电机驱动和油缸驱动俯仰式擦窗机来设计相关零部件。
3.2 多级同步伸缩臂方案设计
镜头里,从东到北长达二十公里的钩型阵地上炮火连天,一片狼藉。鬼子的轰炸机、侦察机在天上来来回回耕着田,肆无忌惮地盘旋、俯冲、拉起,老鸹屙屎一样,把航空弹屙得遍地都是。飞机过后,乌黑的硝烟一朵朵盛开在破碎的大地上。
参考起重机二级臂同步伸缩设计原理,设计油缸驱动同步伸缩擦窗机驱动部分和链传动或者钢丝绳传动部分的零部件结构,完成对应三维图和二维图。参考起重机三级臂同步伸缩设计原理,设计油缸驱动同步伸缩擦窗机驱动部分和链传动或者钢丝绳传动部分的零部件结构,完成对应三维图和二维图。参考起重机四级臂同步伸缩设计原理,设计油缸驱动同步伸缩擦窗机驱动部分和链传动或者钢丝绳传动部分的零部件结构,完成对应三维图和二维图。
3.3 通用零部件装配
目前,园区完成了智慧大交通规划(2015—2030年),实现了交通大数据整合,这将更好地推进园区与城市的空间融合,在实现产城融合方面更上一层台阶。
4 伸缩擦窗机臂的结构优化
由油缸驱动同步伸缩擦窗机臂的设计方案结构参数,计算得到各级臂质心位置及质量;由用户输入的擦窗机工作载荷等参数,初选一级臂截面尺寸,并由套接方式确定其余各级臂截面尺寸,对伸缩臂上各危险截面进行校核,得到危险截面处应力值大小及富余率;对伸缩臂进行轻量化设计,以满足用户期望的富余率。根据擦窗机伸缩臂设计标准,伸缩臂危险截面产生的应力应遵循一定的设计规范,通过强度理论计算后,我们进一步可以检验擦窗机的结构尺寸是否符合设计要求,以满足设计的需要。
油缸驱动同步伸缩擦窗机臂上的驱动部分和传动部分零部件已经设计完成,接下将借鉴俯仰式同步伸缩擦窗机和直臂式擦窗机臂的结构,将他们的通用零部件安装在油缸驱动同步伸缩擦窗机臂上,完成对应的装配体。
4.1 确定臂的质心位置和质量
计算质心处的质量时将一节伸缩臂分为臂头、中间方管及臂尾三部分,则质心处的质量可等效为臂头质量、臂尾质量及方管质量之和,通过三部分分别对立住回转中心取矩之和与质心处质量对立柱回转中心取矩相等可推出该级臂的质心位置。
4.2 计算伸缩臂的危险截面在不同工况下的载荷
根据油缸驱动同步伸缩擦窗机臂的自身结构特点与其工作所受载荷的形式可知,擦窗机处于全伸状态时所受的载荷最大,其危险截面为伸缩臂搭接处截面,该处也是最易产生应力集中的位置。危险截面处所受的载荷主要为: 悬挂总载荷(吊篮总载荷及吊钩总载荷)、卷扬机通过钢丝绳作用于总悬挂载荷,对伸缩臂截面均产生了轴向力,该力为压应力;风载荷、惯性载荷、吊篮总载荷、吊钩总载荷、臂头等相对于伸缩臂搭接处截面产生多个弯矩。针对不同的载荷工况,强度计算校核公式中的载荷系数也不同。其载荷工况分为以下四种:1)载荷工况1:正常工作(例如额定载重量下下,允许风速);2)载荷工况2a:偶然发生情况(例如静载和动载试验,超载检测装置动作)3)载荷工况2b:偶然发生情况(例如暴风)4)载荷工况3:极限情况(例如后备装置动作)。
在进行葡萄促成栽培的过程中,需要根据棚内情况进行适当的灌溉。在这个过程中应用节水滴灌技术,不单可以解决干旱问题,同时还可以随水施肥,更好的均匀灌水和施肥,从而为果农节约时间和成本。在葡萄坐果之后,果农还需要通过结合膨大肥进行充分的灌溉,更好的保证幼果的生长和发育,采收前的15d左右也需要进行适当的水分补充,从而防止出现果实开裂的现象。
4.3 伸缩臂的危险截面强度校核
病房里三张床,有两张是空的。只有牛皮糖一个人坐在床上,双手抱膝,仰头在看镶在墙上壁柜里的电视。电视里播的是一档美食节目,他看得流口水。
4.4 伸缩臂上的零部件选型
用户根据各级臂的截面尺寸选取臂上的零部件,例如角钢、浮动滚轮、减速机型号等。并选取各级臂材料及初始偏移量。
通过一级臂的截面尺寸与伸缩臂的套接方式初选各级伸缩臂截面尺寸。由用户选取的一级臂方管材料得到许用应力[σ],将一级臂备选截面尺寸代入危险截面强度校核公式,得到各工况下满足强度要求的最小截面尺寸,为保证一级臂在四种工况下的强度均满足要求,则一级臂截面的设计结果为四种工况下最大的截面尺寸,最终用户也可以自定义修改一级臂截面尺寸的设计结果;得到一级臂截面尺寸后,用户选择伸缩臂的套接方式即可确定下各级臂的截面尺寸。
该方案在极限状态中各级臂完全按照搭接系数进行摆放,各级臂无富余量,不过伸缩臂前后两端不能保证紧凑即Bi≥Bi、Ai≥Ai。该方案计算公式是由裁剪方式进行确定。裁剪方式分为两个阶段:1、分段裁剪,在极限状态中Bi≥Bi、Ai≥Ai,在裁剪过程中不考虑搭接系数,把多余的Bi和Ai裁剪掉;2、共同裁剪,该状态Bi=Bimin,Ai=Aimin,为了保证裁剪后伸缩臂两端一直处于紧凑状态,共同裁剪时每一次循环所有的臂都减少相同距离,直到最大值满足用户的要求停止。
4.5 伸缩臂危险截面强度校核
对各级臂危险截面进行强度校核,得到四种工况下该截面的应力值σ及富余率k( k=(σ-[σ])/[σ] )。
5 臂的参数化设计
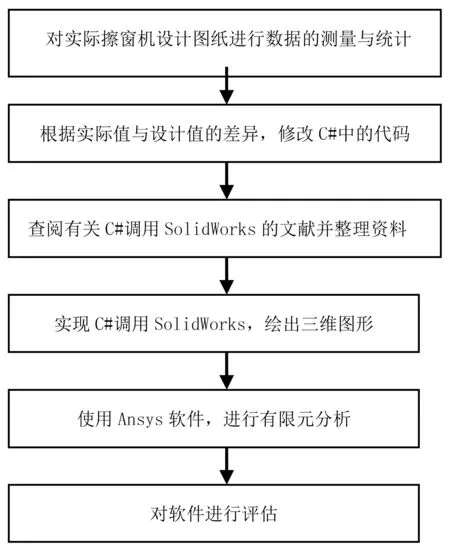
通过查阅参数化设计相关文献资料,确定VS2010平台并使用C#环境对SolidWorks的进行二次开发,实现将C#中计算得到的结构参数传递到SolidWorks中,用尺寸驱动方法绘制出擦窗机工作臂的三维参数化图形,如图3所示。
5.1 长度计算编程
将之前推导的长度计算公式在VS2010平台C#环境下用程序实现,对长度计算的页面进行优化,使用户操作步骤更少,软件使用起来更加方便智能化。
5.2 强度校核编程
该方案中在缩回状态时各级臂保证前端紧凑(Bi=Bimin),各级臂同时往前伸,当其中一级臂满足搭接系数时停止运动,这时只有某一级臂满足搭接系数,其余的臂都有富余,然后把富余量全部裁减掉,臂最轻。该方案计算公式是由裁剪方式进行确定。裁剪方式:1.分段裁剪区间内,Bi=Bimin,Ai≥Aimin,这时候裁剪只对Ai进行裁剪,直到裁剪到Ai=Aimin停止。(为了保证两端紧凑,各级臂的搭接系数≥Ki)。2.共同裁剪区间内,该状态Bi=Bimin,Ai=Aimin。为了保证裁剪后伸缩臂两端一直处于紧凑状态,共同裁剪时每一次循环所有的臂都减少相同距离,直到最大值满足用户的要求停止。
5.3 伸缩擦窗机臂零部件分类
对现有的擦窗机图纸统计之后,我们可以把伸缩臂分为部件库和零件库,其中部件库分类为:一级臂、中间臂、主臂和配重臂。零件库分类为:通用零件、独立伸缩零件和标准件。通过分类以后,我们就可以按照不同的形式进行参数化。
5.4 通用零件尺寸分析处理
通用零件顾名思义就是油缸驱动同步伸缩擦窗机、俯仰式擦窗机和直臂式擦窗机共有的零件。统计出来通用零件后,对零件的功能和尺寸进行分析,找出零件尺寸随着工作臂截面尺寸变化的变化规律,如果这种规律可用方程式表示出来,此时就需要将三维建模是的方程式编辑到C#程序中进行驱动;如果无法用方程式表示出来,此时就需要将工作臂不同截面尺寸下对应的该零件尺寸进行统计,这样一来,就会出现很多零件结构尺寸的数据,此时就需要使用数据库,将这些数据存储起来。
5.5 独立伸缩零件尺寸分析处理
独立伸缩零件就是指只存在直臂伸缩式擦窗机中的零件。这部分零件都是根据直臂伸缩式擦窗机的结构确定的,我们同样也需要对这部分零件的尺寸进行分析,找出零件尺寸随着工作臂截面尺寸变化的变化规律,如果这种规律可用方程式表示出来,此时就需要将三维建模是的方程式编辑到C#程序中进行驱动;如果无法用方程式表示出来,此时就需要将工作臂不同截面尺寸下对应的该零件尺寸进行统计,这样一来,就会出现很多零件结构尺寸的数据,此时就需要使用数据库,将这些数据存储起来。
5.6 标准零件尺寸分析处理
标准零件是指标准件是指结构、尺寸、画法、标记等各个方面已经完全标准化,并由专业厂生产的常用的零(部)件,如螺纹件、键、销、滚动轴承等等。我们需要统计出来擦窗机中所用到的标准件,制作标准零件库放在一起。标准零件不需要参数化,在参数化绘制三维图时,这些零部件只需要提前绘制好,即需要建立标准零件库,在绘制装配图时,调用标准件即可。
5.7 完成伸缩擦窗机零部件库
部件库分类为:一级臂、中间臂、主臂和配重臂。部件库的参数化有两种方法,第一种方法:每一种臂有几种截面类型就做几种部件模型,根据用户的选择调出指定的模型。第二种方法:对于每一种臂只需要做一种部件模型,根据用户的选择,参数化模型中相关的零件尺寸进而得到我们想要的部件。第一种方法制作简单但部件库占用内存较大;第二种方法完全需要编程操作,因此对编程量大但是可以节省一定的空间。综合两种方法分析,当擦窗机机型较多时需要考虑内存的影响,因此我们选择第二种方法完成油缸驱动同步伸缩擦窗机部件库的制作。
5.8 数据库的建立
以 Solid Works 为开发对象,利用 C#开发语言,开发出油缸驱动同步伸缩擦窗机伸缩臂三维参数化计算机辅助设计系统。在系统中,利用 Access 数据库管理伸缩臂的设计参数和绘图的尺寸参数,通过 VB.NET 对数据库的引用,实现两者的数据连接和访问,减少数据输入的工作量,而且使得程序的编写更简单。基于C#对直臂伸缩式擦窗机参数化的数据基础是建立在数据库的基础上,不同规格零件的尺寸数据都需要统计在数据库中。编制好数据库之后,通过C#编程软件提取相应的数据,才能准确的改变模型参数,实现零部件的参数化。
6 结语
在设计本类擦窗机产品时,用户输入满足擦窗机作业尺寸的参数后,设计出满足强度、刚度及性能要求的产品。同时能够生成相应的油缸驱动同步伸缩臂工作臂图纸,这样不仅可以缩短产品的开发周期,而且可以节约劳动力资源,降低生产成本,提高产品的市场竞争力。
[1]祝志峰、曹恩钦、李文波.我国擦窗机设计的发展现状及趋势[J].城市建设理论研究,2012(20).
[2]隋文科,孙靖民,庄晓.擦窗机系统及设计概述[J].机械设计与研究.1998(4):57-59.
[3]王乾.履带起重机模块化参数化设计技术研究[D].辽宁:大连理工大学.2008(12).
[4]齐成、屈福政. 伸缩臂腹板局部稳定性计算方法研究[J].建筑机械,2011(01):56-58.