一种差分码偏差估计的简化模型及其评估分析
2022-08-01汪奇生
汪奇生
1 湘潭大学土木工程与力学学院,湖南省湘潭市北二环路,411105
在卫星导航定位中,码观测值会因为硬件特性在卫星和接收机端产生硬件延迟,2个频率的码观测值硬件之差称为差分码偏差(differential code bias, DCB)[1-2],其在卫星端称为卫星差分码偏差,接收机端称为接收机差分码偏差。DCB是电离层建模和精密单点定位中重要的误差源,需要被精确计算。DCB分为频内DCB(同一频率的码观测值硬件延迟之差)和频间DCB(不同频率的码观测值硬件延迟之差)[3]。频内DCB一般可以通过码观测值的平均组合观测值求取,本文所指的DCB为频间DCB。
卫星和接收机DCB的估计方法一般有2种:一种是采用球谐函数进行全球电离层建模,同时估计卫星和接收机DCB[4-6]。首先需要联合全球的测站数据进行观测方程列立,然后估计球谐函数系数和卫星及接收机DCB。该方法估计DCB的效果依赖于建模的精度,并且有一定的计算量。另一种是使用已有的全球电离层图(global ionosphere map, GIM)。首先进行时间和空间上的内插来获取穿刺点的TEC,进而消除其参数,然后估计卫星和接收机的DCB值[7-9]。该方法可在一定程度上减少计算量、提高估计效率,但其估计DCB的效果主要依赖于GIM精度。
由于2种常规方法都需要进行电离层建模和使用已有的GIM信息,因此本文在原有方法的基础上提出一种差分码偏差估计的简化模型,将测站方向上各穿刺点的VTEC简化为一个参数,分时段进行直接估计。为验证该方法的有效性,采用球谐函数建模和基于GIM的估计方法进行比较分析。选用2016-01近200个IGS测站的GPS+GLONASS数据进行实验,并采用CODE提供的产品进行验证。实验结果验证了本文方法的有效性。
1 差分码偏差估计方法
1.1 电离层TEC观测值
GPS和GLONASS 的伪距和载波相位观测值可以表示为[10]:
(1)

一般情况下,采用载波相位平滑伪距法来提取电离层延迟:
cDCBi+cDCBj
(2)
STEC=M(z)·VTEC=
(3)
式中,M(z)为电离层投影函数,R为地球平均半径,H为假设的电离层薄层高度,z为接收机到卫星方向上在假设电离层薄层处的天顶距,α为调节因子(一般取值为0.978 2)。因此,可以将式(2)进一步表示为:
P4,sm=F(f)·M(z)·
VTEC+cDCBi+cDCBj
(4)
1.2 球谐函数建模求解DCB
本文采用15阶球谐函数进行全球电离层TEC建模,结合式(4)可以将球谐函数建模的观测方程表示为[11]:
F(f)·M(z)+cDCBj+cDCBi=P4,sm
(5)
式中,n和m分别为球谐函数的阶次,β和ms分别为穿刺点的地理纬度和日固经度,anm和bnm分别为模型的待求系数。采用分段线性方法进行球谐函数参数估计,每2 h估计一组参数, 1 d共估计13组参数,则需要估计的球谐函数参数数量为13×256=3 328个。由于使用全球测站的GPS+GLONASS观测值共同建模,因此观测值的个数远大于待求参数的个数,可以直接使用最小二乘平差法求解。需要估计的参数为:
(6)
式中,G和R分别为GPS和GLONASS,r和 i分别为测站和卫星。同时,为分离接收机DCB和卫星DCB,还需要在平差方程中分别对GPS和GLONASS进行卫星DCB零矩阵约束:
(7)
1.3 基于GIM建模求解DCB
不同于球谐函数建模,基于GIM建模可直接使用IGS提供的GIM。本文首先采用CODE的GIM产品进行时间和空间上的内插来获取穿刺点的VTEC值,然后直接消除VTEC参数,其观测方程可以表示为[7]:
cDCBr+cDCBi=
(8)
式中,N为观测值的总数,其他参数意义与前文相同。同时,为分离卫星和接收机DCB的参数,同样需要添加式(7)进行约束。因此,基于GIM建模求解DCB可以直接获取GPS和GLONASS的卫星及接收机DCB值。
1.4 简化模型建模求解DCB
采用球谐函数建模在理论上比较严密,但待估参数较多,计算量较大。因此在求解DCB时,可以采用IGS的GIM产品直接获取VTEC,能减少估计参数、提高解算效率,但解算效果要依赖于GIM的精度。测站方向上的穿刺点在一定范围内的VTEC变化不大,对电离层TEC项进行平均(式(8))。根据这一特点,可以将穿刺点的VTEC在一个时段内简化为一个参数进行估计,从而获取卫星和接收机的DCB值。
根据球谐函数模型和基于GIM模型提出简化模型,假设一定空间范围内的测站穿刺点VTEC在一定时段内不变或变化很小,则可以将一个测站一段时间内(1 d可分为若干个时段,本文采用24个时段)的VTEC值设为一个参数,观测方程为:
cDCBi+cDCBr=P4,sm
(9)
式中,VTECr,t为测站r在t时段内的VTEC均值,即简化后的电离层TEC参数,其他参数意义与前文相同。该模型对穿刺点的VTEC参数进行简化,减少待估参数,可以直接求解DCB值。为分离卫星和接收机DCB参数,同样需要进行式(7)的卫星零均值约束。可以发现,TEC参数简化后模型的可行性决定了简化模型的有效性。但考虑到一定时段内测站方向上各穿刺点的TEC变化较为缓慢,而且简化过程相当于对各穿刺点的TEC进行平均,因此后续实验将进一步分析其估计DCB的效果。
2 实验数据
为评估本文方法的有效性,选取IGS提供的2016-01(doy 001~031)近200个测站的观测值作为实验数据。这些测站在全球均匀分布,但陆地上的测站居多。测站都能接收到GPS信号,其中一部分还能接收到GLONASS信号。为更好地评估和分析本文方法的有效性,分别采用球谐函数建模(SHM)、基于GIM建模(DGM)和本文提出的简化模型建模(DSM)3种方法估计GPS和GLONASS的P1-P2卫星和接收机的DCB,同时采用CODE提供的GPS和GLONASS的P1-P2 DCB产品进行验证和分析。评估分析实验策略如表1所示。
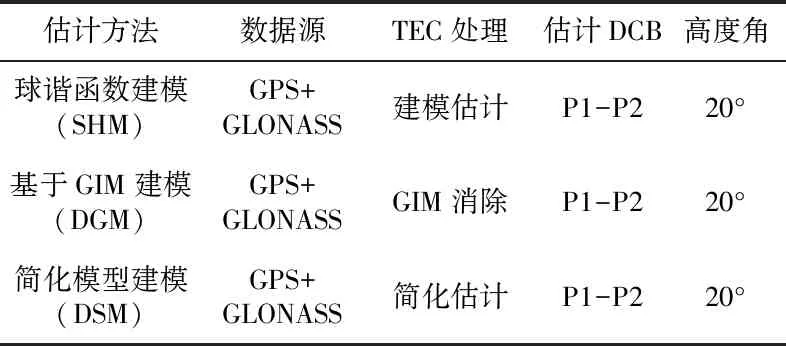
表1 评估分析实验策略
3 结果讨论与分析
3.1 卫星DCB估计结果
为更好地分析本文方法估计的DCB效果,选择CODE提供的GPS和GLONASS的DCB产品作为参考,比较分析3种方法估计的卫星DCB精度,分别如图1(GPS卫星按照类型排列)和图2(GLONASS卫星按照频率排列)所示。
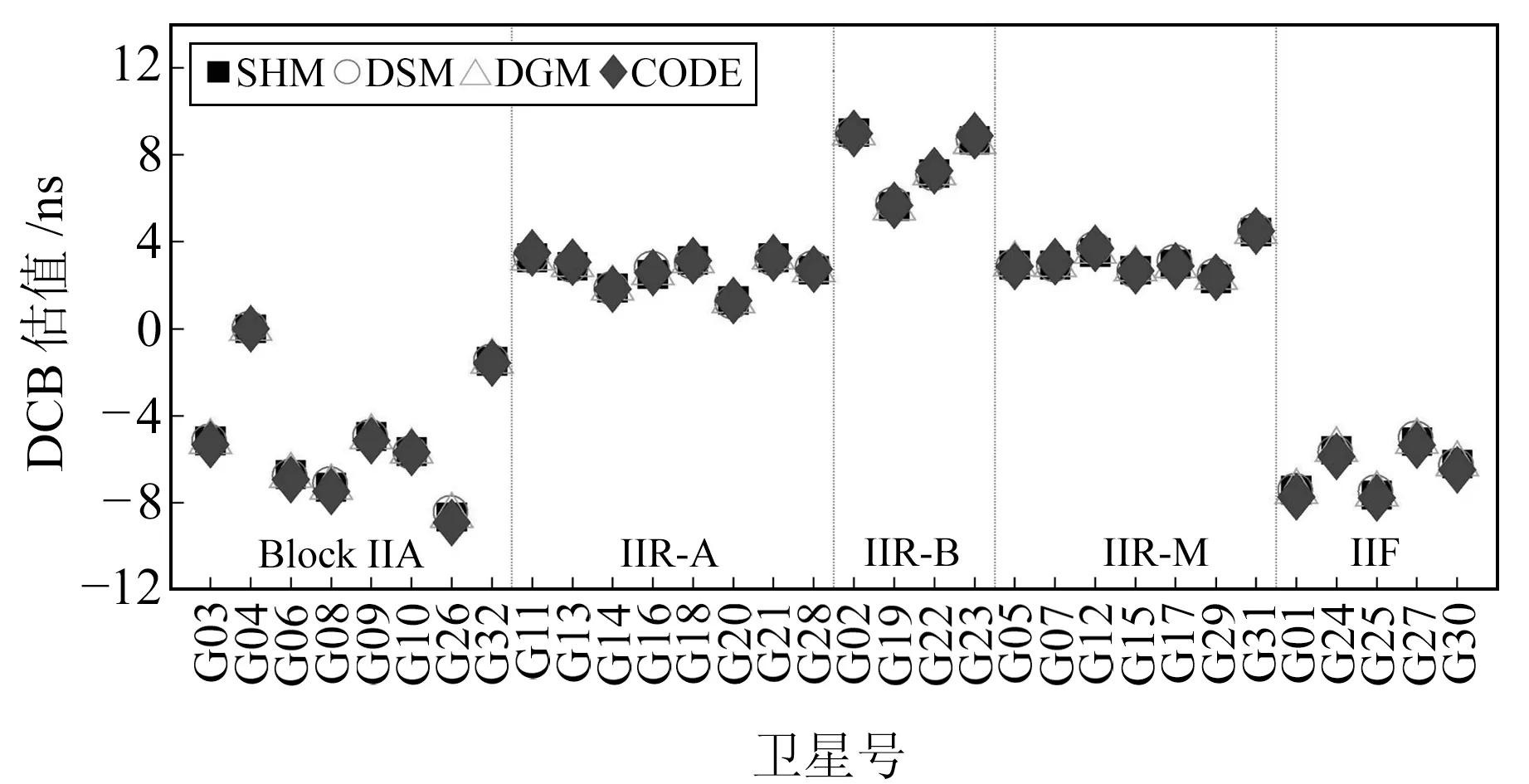
图1 GPS卫星P1-P2 DCB估值
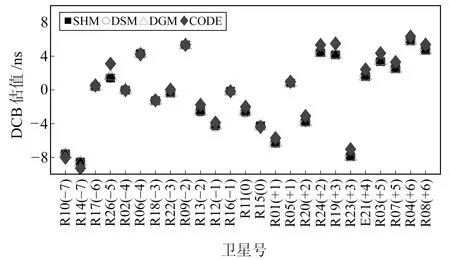
图2 GLONASS卫星P1-P2 DCB估值
由图1可见,GPS卫星DCB月均值为-10~10 ns,3种方法估计的结果与CODE值非常接近,且相同类型卫星的DCB值较为接近,说明DCB主要与硬件设备有关。由图2可见,GLNASS卫星的DCB估值为-10~7 ns,且比较分散。不同于GPS,各种方法的估计值在一些GLONASS卫星上有一定的差异,这是因为GLONASS卫星采用的是频分多址技术,该技术对其卫星DCB估值有一定的影响。
为进一步分析3种方法在估计GPS和GLONASS卫星DCB上的精度,以CODE提供的产品为参考,统计3种方法估计的卫星DCB值的平均偏差(bias)和标准差(STD),分别如图3和图4所示。
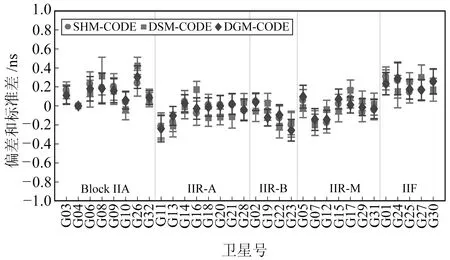
图3 GPS卫星P1-P2 DCB 偏差和标准差
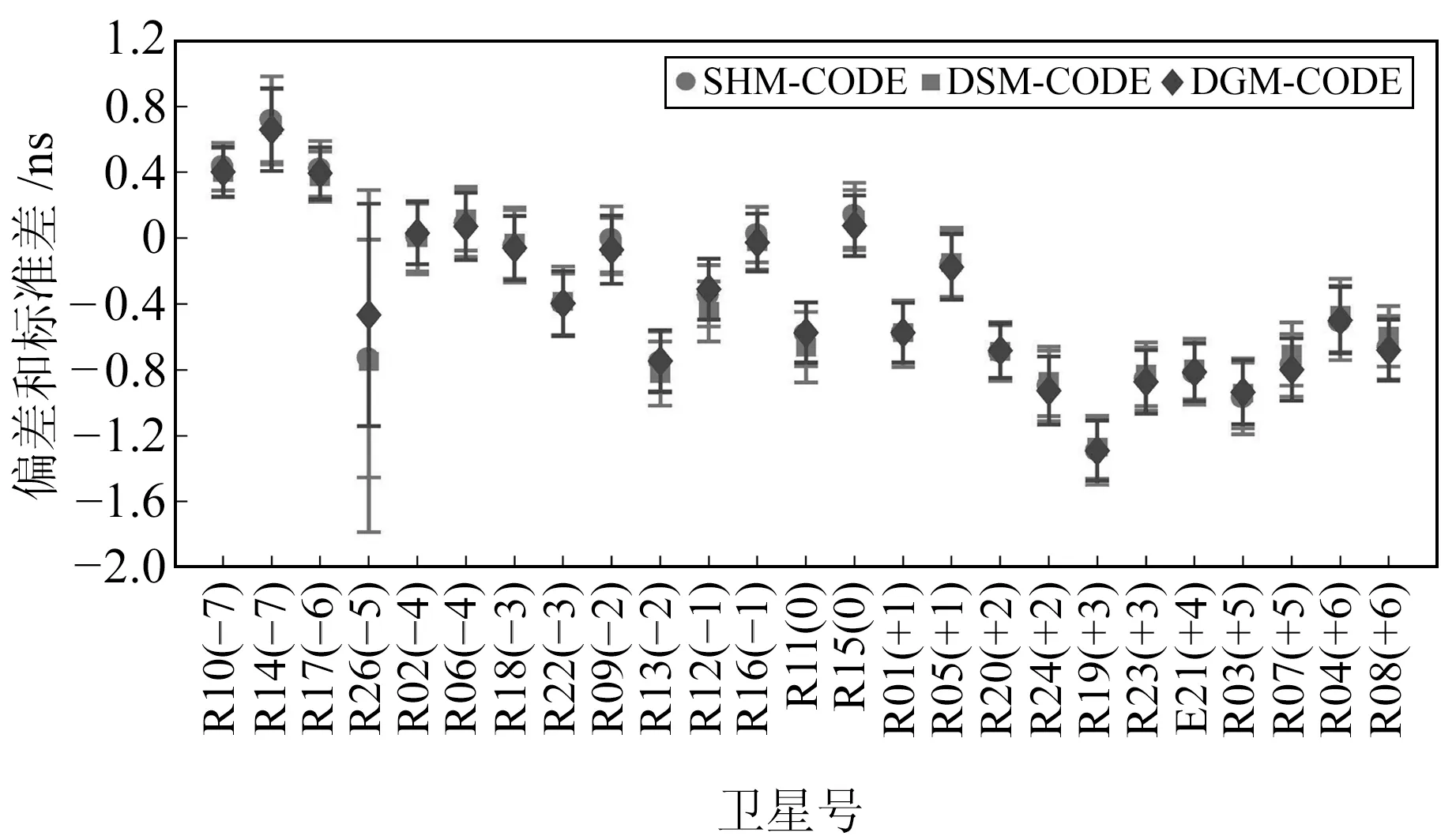
图4 GLONASS卫星P1-P2 DCB 偏差和标准差
由图3可见,3种方法估计的GPS卫星DCB值与CODE产品相比,平均偏差为-0.3~0.5 ns,标准差为0.05~0.20 ns,说明3种方法的估计值与CODE产品有较好的一致性。相比于本文DSM方法,采用SHM和DGM方法估计的结果偏差更小,这是因为SHM与CODE都是采用球谐函数进行建模,DGM则直接使用CODE提供的GIM产品。而本文采用简化模型提高估计效率,观测数量较少的部分卫星可能影响其估值精度,但精度值也达到0.2 ns。由图4可以看出,相比于GPS,GLONASS卫星3种方法的估计值与CODE产品的偏差比较分散,偏差为-1.3~0.7 ns,标准差为0.14~1.10 ns,这可能与GLONASS卫星采用的频分多址技术有关。其中,R26卫星的偏差最大,这可能与其较少的观测卫星数量有关。对比3种方法可知,本文方法相对于CODE的偏差和标准差还是比较接近的,说明本文方法能达到与SHM和DSM方法相同的估计效果。
3.2 接收机DCB估计结果
与卫星DCB不同,接收机DCB除了与本身的硬件特性有关外,还与接收机类型、天线类型和接收机所处位置有关。为更好地比较分析GPS和GLONASS接收机DCB的估值效果,分别从观测数据中选择具有不同接收机类型的30个测站用于比较分析。表2、表3分别为30个GPS和GLONASS跟踪站的信息。图5和图6分别为3种方法和来自CODE产品的GPS和GLONASS 30个测站的接收机DCB值。图中测站按照不同的接收机类型排列,不同接收机类型用虚线划分。
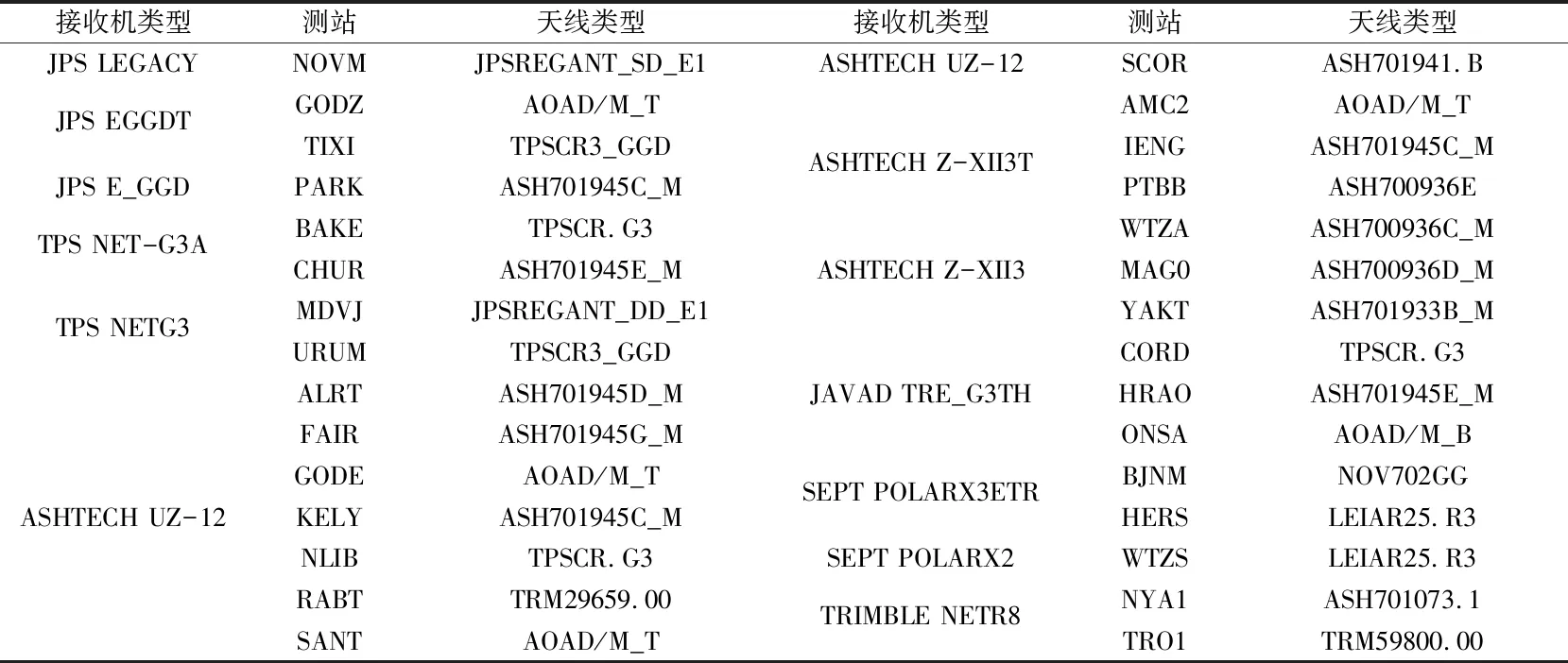
表2 GPS 跟踪站信息
由图5可见,GPS接收机DCB的月均值为-20~15 ns,3种方法解算的结果与CODE产品比较接近。同时,相同接收机类型的DCB月均值比较接近,但也会因天线类型的不同而产生波动,说明接收机DCB的值与接收机和天线类型均有关,但接收机DCB的稳定性还需要考虑地理纬度效应。图6中GLONASS接收机DCB月均值为-30~20 ns,3种方法解算的结果比较接近。相同接收机类型的DCB月均值也比较接近,接收机类型、天线类型均相同的DCB值则更为接近。
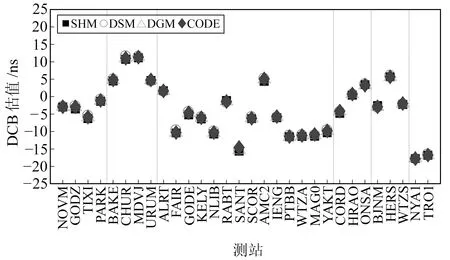
图5 GPS 接收机P1-P2 DCB估值

图6 GLONASS 接收机P1-P2 DCB估值
为进一步评估本文方法估计接收机DCB的效果,以CODE提供的DCB产品为参照,计算3种方法估计的接收机DCB值与CODE提供的DCB产品之间的平均偏差和标准差,如图7和图8所示,图中测站按照其所处的纬度位置排列。
由图7可以看出,3种方法的结果与CODE的平均偏差为-0.6~0.7 ns,标准差为0.05~0.7 ns。其中DGM的偏差和标准差最小,说明电离层精度与接收机DCB的相关性最强。从测站纬度分布可以看出,电离层活跃程度与接收机DCB的估计结果有关。DSM简化模型偏差较大,说明简化估计VTEC带来的误差会影响接收机DCB的估计结果。
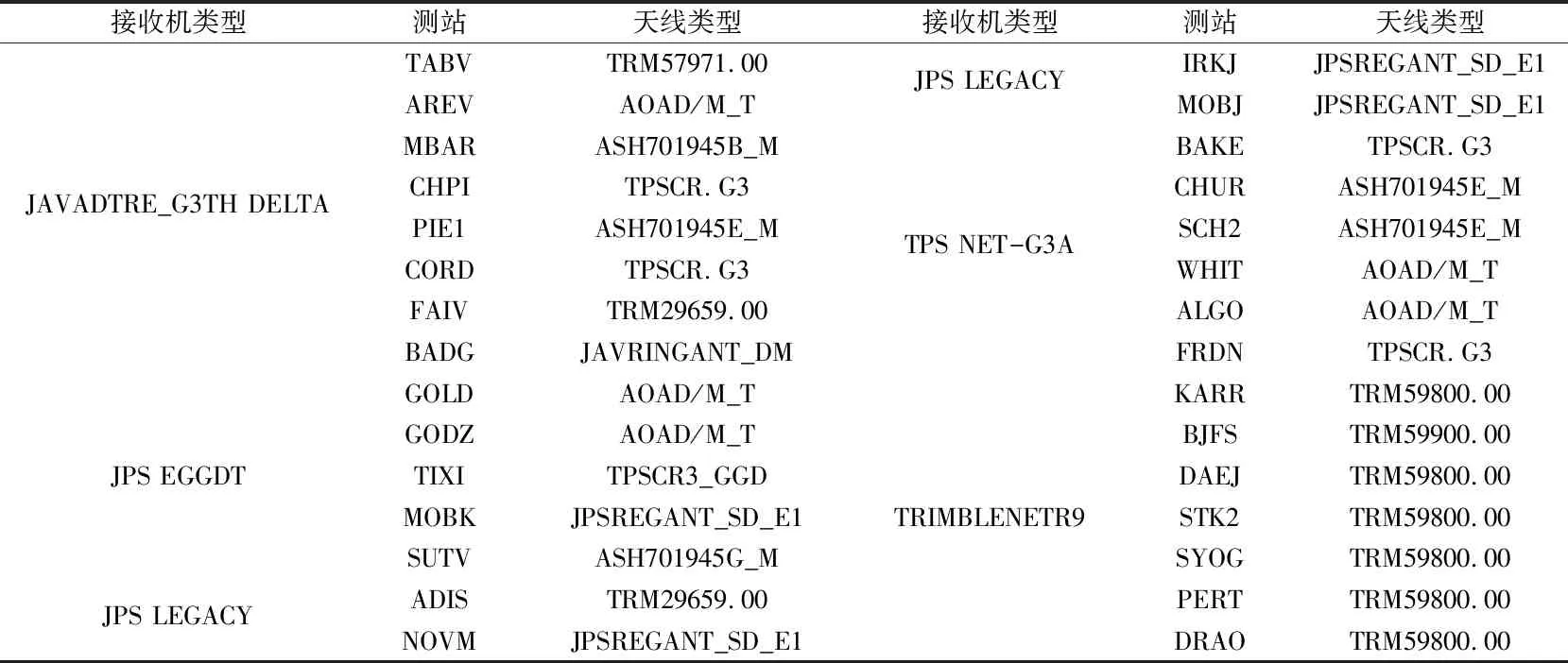
表3 GLONASS 跟踪站信息
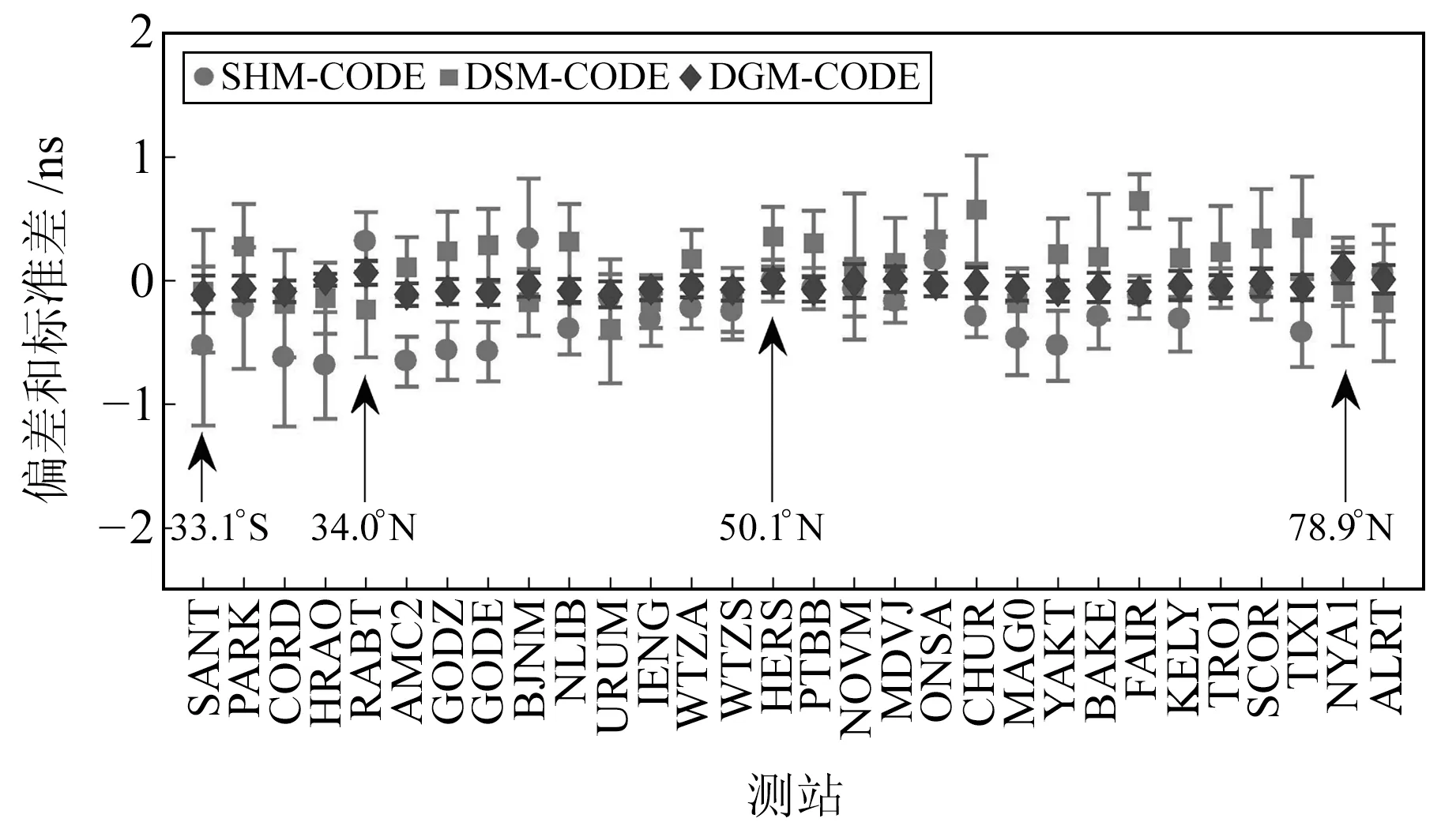
图7 GPS 接收机 P1-P2 DCB平均偏差和标准差
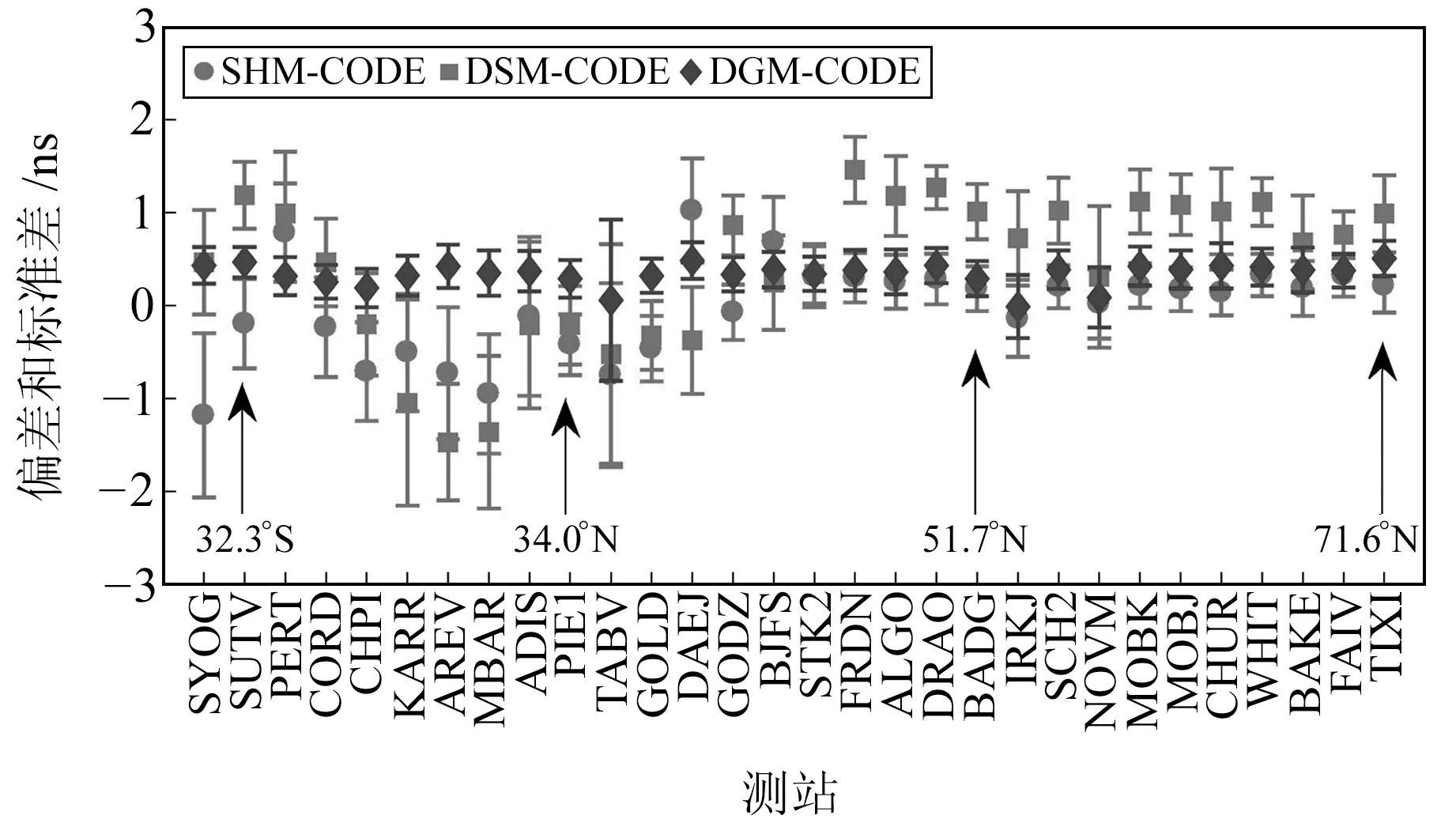
图8 GLONASS 接收机 P1-P2 DCB平均偏差和标准差
由图8可见,3种方法的结果与CODE的平均偏差为-1.5~1.5 ns,标准差为0.16~1.2 ns。GLONASS接收机估计偏差较大,可能与其卫星采用的频率技术有关;简化模型的偏差较大,说明简化VTEC估计带来的电离层误差会影响接收机DCB;低纬度分布的接收机DCB偏差较大,说明其受到电离层纬度效应的影响。
4 结 语
1)对于GPS和GLONASS卫星DCB,本文方法与其他2种方法的估计结果比较接近,且GPS和GLONASS卫星DCB与CODE产品相比的平均偏差分别为-0.3~0.5 ns、-1.3~0.7 ns,标准差分别为0.05~0.20 ns、0.14~1.10 ns。
2)对于接收机DCB,3种方法与CODE产品的平均偏差分别为-0.6~0.7 ns (GPS)和-1.5~1.5 ns (GLONASS)。
实验结果验证了改进方法的有效性。需要说明的是,本文实验是在太阳活动相对平稳的条件下进行的,太阳活动剧烈条件下该方法的适应性还需进一步探讨分析。