基于数据质量评价的目标估计*
2022-08-01贺文娇
贺文娇
(中国西南电子技术研究所,成都610036)
0 引 言
信息融合是20世纪70年代出现的一门学科,目的是综合雷达、光电、敌我识别、电子支援、情报、数据链等传感器目标数据,形成及时、准确、连续、完整和一致的战场态势[1]。根据美国国防实验室联合理事会(Joint Directors of Laboratories,JDL)定义的信息融合模型[2],目标估计是信息融合的第一级处理过程,主要通过数据配准、数据关联、目标位置和运动学参数估计、目标身份和属性参数估计,得到明确的目标位置和属性信息,为更高级别的融合提供辅助决策信息。目标估计最大的难点在于不同传感器获取的数据质量差异大,直接融合困难,估计过程需要大量的人工参与,导致融合自动化水平低。
为提高目标估计的自动化水平,国内外已有大量的研究,尤其在目标位置连续的航迹融合领域,已有相当成熟的应用。然而在目标身份和属性参数估计方面,无论是模糊推理、D-S证据理论还是贝叶斯网络、神经网络等估计算法,都有一个共同的特点,即融合权重和融合规则,需要人工事先设置,如果传感器实际数据质量与人工估计存在偏差则会严重影响融合的效果。随着人工智能技术的发展,利用集成学习、强化学习等算法,训练基于多源数据的目标估计模型[3]成为可能,但是在实际应用过程中,由于缺少足够的训练样本,导致估计效果不佳。
本文提出了基于数据质量评价的目标估计方法,通过对前端传感器数据质量进行评价,以客观质量评分代替主观的人工判定,并以此为依据动态调整各传感器数据参与融合的权重,从而在不影响估计准确性的前提下提高目标估计的自动化水平。
1 目标数据质量评价
不同传感器获取的目标数据质量不同,例如:雷达探测传感器可以得到连续的目标航迹,但是却难以判别目标身份;电子支援传感器可以得到较为准确的目标身份信息,但是却难以得到准确的目标位置;图像传感器可以得到目标身份和目标位置,但是信息的时效性却不高。图1所示为目标估计模型,其过程就是要充分发挥多源数据融合的优势,取长补短、相互印证,从而得到准确的目标属性和位置信息。

图1 目标估计模型
对参与融合的各数据源进行质量评价,首先根据各数据源的特点和融合需求,选择适当的质量评价指标。指标选得过多,会增加系统负担;而指标选得过少,会导致评价结果不够准确。文献[4]详细阐述了常见的目标数据质量评价指标(见图2)及对应指标的计算方法,本文不再赘述。

图2 目标数据质量评价指标[4]
目标数据质量包含目标属性质量(Attribution Quality,AQ)和目标航迹质量(Track Quality,TQ)两部分。其中,目标航迹数据质量主要用于评价航迹的准确性、及时性和稳定性。参照美军Link-16数据链航迹质量标准[5],如表1所示。表1中,第二列采用航迹误差散布圆面积为TQ分级门限,其单位为数据英里(1 DM=1 828.8 m)的平方;第三列为16级TQ分级门限距离数据,单位为DM;第二列与第三列的TQ门限在数值上呈圆面积半径关系,即S=πr2。

表1 目标航迹质量等级
目标属性质量主要用于评价传感器提供的目标属性参数的完整性与准确性。目标属性参数的完整性,主要是指海空、类型、型号、个体、隶属建制、国别、敌我这七类,且相互之间存在层级关系[6],如图3所示。

图3 目标属性参数的层次化特征结构分析
目标属性的准确性是指对应属性的辨识概率(0~100%),因此有
AQ=C×m。
(1)
式中:C表示属性完整性得分,m表示属性对应的辨识概率。参考航迹质量等级划分方法,目标属性完整性得分定义如表2所示。
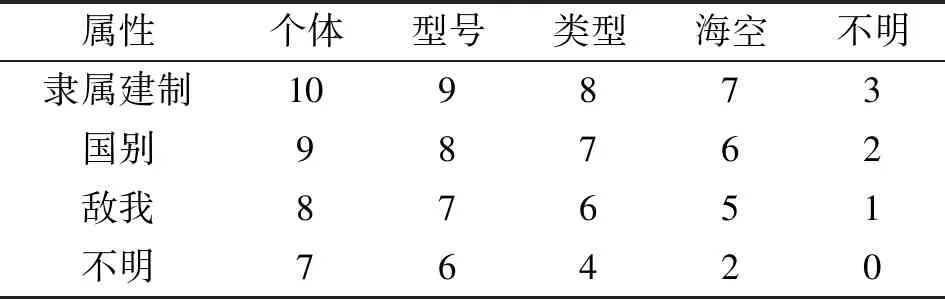
表2 目标属性完整性质量分
目标数据质量评价系统包括在线和离线两种工作模式,在工程应用过程中,两种模式需要结合使用才能得到更为准确的质量评价结果,具体步骤如图4所示。

图4 数据质量评价步骤
(1)离线评价模式:对数据库中存储的历史数据进行质量计算,得到的历史数据质量评分,将各数据源的质量分进行归一化处理,从而得到目标估计的初始权重。
(2)在线评价模式:在融合第0级处理过程——数据预处理系统中,对接收到的实时数据进行质量评价,并根据实时数据质量动态调整,得到参与目标估计的各信源实时权重。
2 目标估计规则动态调整
在信息融合领域,并不是融合的数据源越多效果越好,甚至有融合后的数据质量反而不如融合前的情况。利用数据质量评分,动态调整参与融合的各数据源权重,一是避免越融越差,二是避免因人工采信某一数据源造成传感器资源的浪费。
2.1 属性估计规则动态调整
属性估计的目的是为了确定目标的唯一的身份和属性信息。
假定参与融合的数据源为A和B,融合后为目标AB,AQ(A)和AQ(B)分表表示数据源A、B的属性质量。利用A、B的质量等级,调整目标属性估计中,数据源A、B分别所占的权重。调整规则如下:
(1)如果(AQ(A)==10 || AQ(B) ==10) 那么融合目标AB的属性直接取A或B的属性参数;
(2)如果(AQ(A)<2 ||AQ(B)<2),那么融合目标AB的属性为不明;
(3)其余情况,根据A、B的质量分,计算得到A、B的权重值,代入目标属性估计算法,进行属性估计计算。
以常用的D-S证据理论[6-7]算法进行目标属性估计为例,假设辨识框架U中有性质不同的证据A和B,其属性值分别是Ai和Bj,基本概率赋值分别是m1(Ai)和m2(Bj),则融合规则如下:
将属性质量评价结果AQ(A)和AQ(B)应用于修正基本概率值m1(Ai)和m2(Bj):
(2)
(3)
修正后的融合规则如下:
(4)
2.2 位置估计规则动态调整
位置估计是确定目标唯一的位置和运动学参数。
由于传感器定位精度和跟踪能力的不同,有的传感器能够获取连续的目标航迹,有的传感器只能得到零散的目标点迹,因此目标位置估计算法又分为点-点融合、点-航迹融合和航迹-航迹融合3类。本文主要以航迹-航迹融合为例,阐述数据质量评价结果对融合权重的影响。
假定参与融合的航迹为A、B,融合后生成的航迹为AB,TQ(A)、TQ(B)分别表示两条原始航迹的质量等级。航迹融合规则如下:
(1)如果|TQ(A)-TQ(B)|> 2 那么融合航迹AB直接采信质量高的航迹;
(2)其余情况,将航迹质量等级归一化后作为权重进行融合计算。
以常用的协方差交集算法为例,假定归一化后A的航迹融合权重为m1,B的航迹融合权重为m2,有m1+m2=1,融合后航迹为
(5)
式中:P表示融合后的航迹点,Pi表示航迹A中第i个航迹点,Bj表示航迹B中第j个航迹点,X表示A和B在时间上可对准的航迹点集合。
2.3 融合贡献度
根据参与估计的各信源权重,即可计算出各个信源在融合过程中的实际贡献。
假定融合过程中,数据源A、B所占权重m(A)、m(B)如表3所示。

表3 参与融合的各数据源权重
在同一时刻,有
m(A)+m(B)=1 。
(6)
因此,信源A对融合的实际贡献
(7)
式中:k表示融合过程中权重改变的次数,NAi表示利用第i个权重计算得到的航迹点个数,N表示融合后AB的航迹点总数。信源B的贡献度计算方法相同。
于是,上面示例中,各信源对融合目标的属性贡献度的计算结果如下:
各信源对融合目标航迹的贡献度如下:
3 试验结果
本文在pycharm-community-2019.3.4开发平台上仿真模拟了动目标监视(MTI)、红外图像侦察(IMG)、AIS信号侦察和卫星信号侦察(SIG)这四类传感器,协同对海上目标进行跟踪监视。想定场景如下:
(1)海上目标静默航行,调集MTI发现目标并进行跟踪;
(2)为确认其身份,调集红外传感器IMG查看,并发出警告;
(3)目标开启AIS,通过解译信息得到目标内涵信息;
(4)目标关闭AIS,通过海事卫星电话与陆地通信,调集MTI和卫星信号侦察手段SIG,持续跟踪监视。
想定目标航迹如图5所示,仿真计算得到的航迹如图6所示。

图5 想定目标航迹

图6 仿真计算得到的四种手段航迹
在传统目标估计系统中,由人工设置各信息源的融合优先级,这四类传感器数据的属性优先级为AIS>IMG>SIG>MTI,航迹融合优先级为AIS>MTI>IMG>SIG。
采用本文方法,计算四种手段航迹数据的质量等级(见表4)、属性质量得分(见表5,辨识概率取100%)以及融合过程中根据实时数据质量计算得到的各数据源实际权重值(见表6)。由表6可知,融合航迹总点数为572。
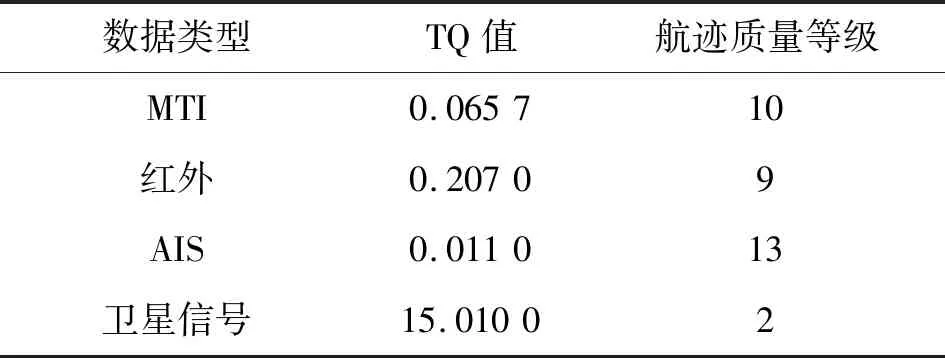
表4 仿真数据航迹质量等级

表5 仿真数据属性质量得分

表6 融合过程中各数据源贡献的权重
两种方法融合得到目标航迹如图7所示,其中蓝色点(ori)为想定目标航迹,橙色点(old)为人工设置权重估计出来的航迹,绿色点(new)是利用本文方法估计出来的航迹。从图中可见,本文方法计算得到的航迹更接近想定目标航迹。

图7 融合目标航迹
利用传统方法对目标属性进行估计,将直接采信优先级更高的信息源提供的属性。但是采用本方法,尤其在传感器获取的目标属性质量相近但属性值有冲突时,融合结果更为准确。如图8所示,两种方法的属性融合结果对比如下:
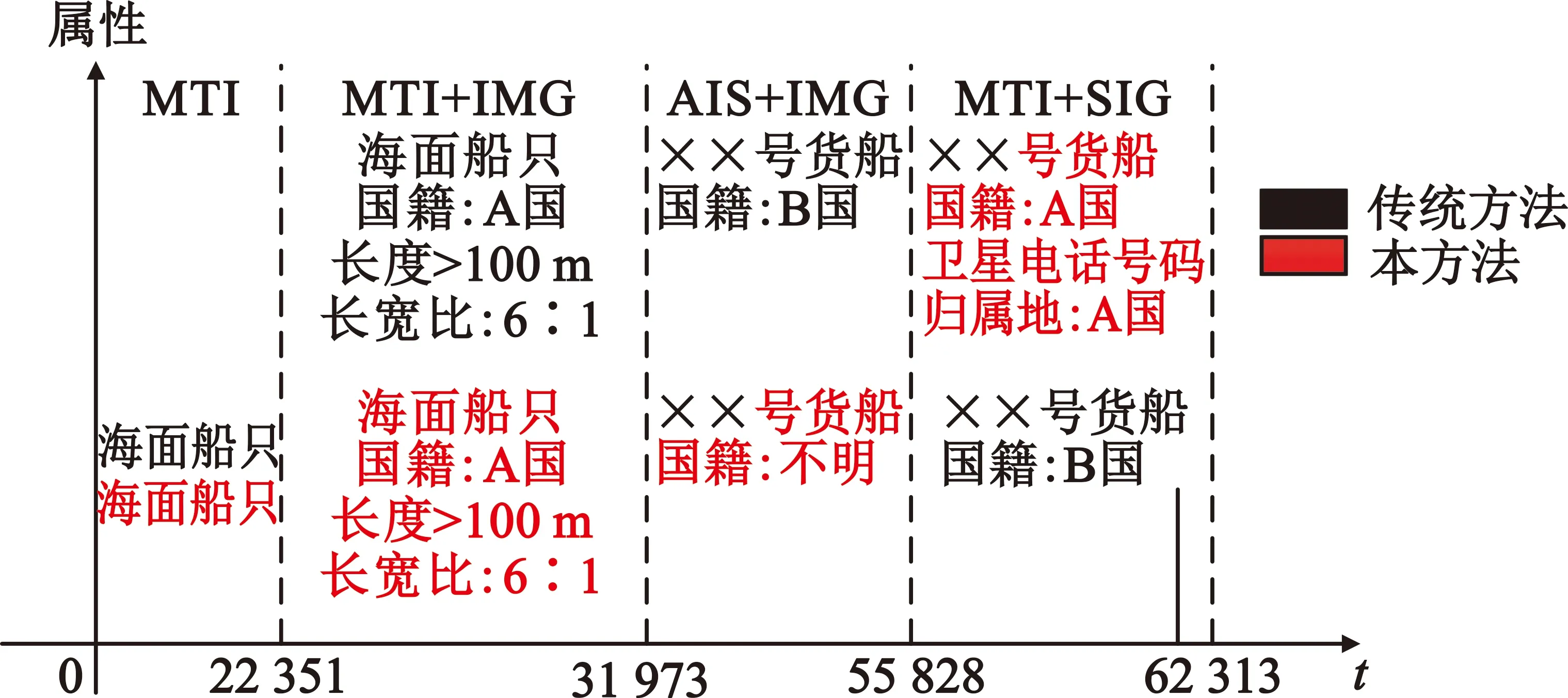
图8 融合目标属性
(1)在31 974≤t≤55 828时间段,传统方法直接采信了AIS得到的国籍信息,但是本方法融合了红外传感器提供的国别属性,发现两种传感器提供的国别属性不同,因此对外输出结果为国别属性“不明”;
(2)在55 829≤t≤62 313时间段,传统方法采信卫星信号传感器信息,本方法融合了三种传感器提供的国别属性,最终确定这艘外形特征和电话号码归属地为A国的船只,发送的AIS中提供了虚假的国籍信息“B国”,而传统方法直接采信AIS信息的做法会导致国别属性判别错误。
计算得到各信源对融合目标属性的贡献度如下:
计算得到各信源对融合目标航迹的贡献度如下:
SIG=0。
四个信源数据的贡献度之和小于1,这是因为在实际融合过程中存在时间对齐的问题。以23 775≤t≤31 973这段时间为例,MTI上报了86个航迹点,而IMG只有41个航迹点,这就意味着至少有45个时刻只有MTI的数据而无IMG的数据。在估计过程中,需要通过内插外推等算法估计IMG在这45个时刻点对应的位置。
4 结束语
本文介绍了利用数据质量评价结果对参与目标估计的数据源权重进行动态调整的方法,有助于减少目标估计过程中对人工的严重依赖,提高目标估计的自动化水平。此外,质量评价结果还可作为数据标签,用于智能算法训练。后续将继续研究态势估计和影响估计阶段的自动化融合方法,进一步提高高阶融合的自动化水平。