点融合飞行程序设计及其容量评估
2022-08-01赵延毫张劲松
赵延毫,张劲松,路 娜
(郑州航空工业管理学院 民航学院,河南 郑州 450046)
0 引言
仪表飞行程序中的进场航段是衔接航路飞行阶段与进近着陆阶段的重要部分,其作用是理顺航路与机场运行线路之间的关系,提高运行效率。目前常用的进场方式为基于进场程序的雷达引导模式。传统雷达引导模式具有指挥灵活的优点,但航迹的可预测性低,而且需要管制员和飞行员频繁地通话,易出错,工作负荷大[1]。近年来,随着我国空域流量的大幅增加,许多机场的进场航段已趋于饱和,传统的雷达引导模式很容易造成航班延误和飞行冲突。针对传统雷达引导中存在的调控工作量大、垂直剖面预测和改善困难、低空轨迹离散等问题,欧洲航行安全组织实验中心提出将点融合技术用于改进传统化终端区运行模式。在管制层面,点融合技术简化了管制工作任务,提升了运行效率;在飞行层面,点融合技术有利于减少雷达引导,改变飞行员被动飞行的状态[2]。本文通过对欧洲空管中心的点融合技术进行研究,介绍了点融合程序的结构特点、程序设计的角度限制和运行点融合程序的步骤和方法;最后研究了点融合系统的容量评估方法,并对某机场的点融合程序容量进行了评估计算。
1 点融合飞行程序介绍
1.1 点融合基本结构
点融合(Point Merge,PM)是对进场航班流进行线性排序的一种系统化方法。PM是运用了圆弧上任意一点到圆心距离相等的基本原理并基于区域导航(RNAV)技术来设计近似弧形的飞行程序,通过使用飞行管理系统(FMS)横向引导(LNAV)功能,在雷达管制条件下实现简化管制任务的运行方式[3]。
点融合技术所设计的飞行程序主要有融合点(M点)和排序边(S边)组成。
融合点(M点):负责将机场终端区范围内不同来向的航空器汇聚的一个点,由经纬度坐标所确定[4]。不同进场方向的航班流在该点进行排队重组,并按照一定管制间隔有序通过,进入下一航段。
排序边(S边):一条在可用空域内以M点为圆心,以一定的距离为半径而设计的弧线。从实际运行角度来看,排序边由许多条到M点距离相等的线段拼接而成[5]。据圆弧上任意一点到圆心的距离相等的原理,位于同一条排序边上的飞机到融合点的距离相等,这样管制员就可很方便地通过控制飞机转弯飞向融合点的时机来准确控制飞机之间的间隔,实现航班流的有序飞行[6]。点融合飞行程序结构如图1所示。
沿排序边飞行的飞机之间需要满足一定的管制间隔,排序边越长、间隔越小,排序边可以容纳的航班数量越多。而飞机转弯飞向融合点的时机,由管制员掌握和发布,通过控制飞机在排序边上多飞或少飞,实现对飞机飞行路径的拉伸和收缩功能,保证管制的精确性[7]。
对于存在多条排序边的点融合程序,其航班在排序边飞向融合点的过程中,通常需要减速和降低高度以通过融合点,因此为了避免内外排序边上的飞机在飞往融合点时飞行剖面的交叉影响,内排序边要比外排序边高一个垂直间隔[8]。
1.2 点融合程序角度限制
为了方便飞行员实施,点融合系统对程序转弯的角度也有限制,如图2所示。
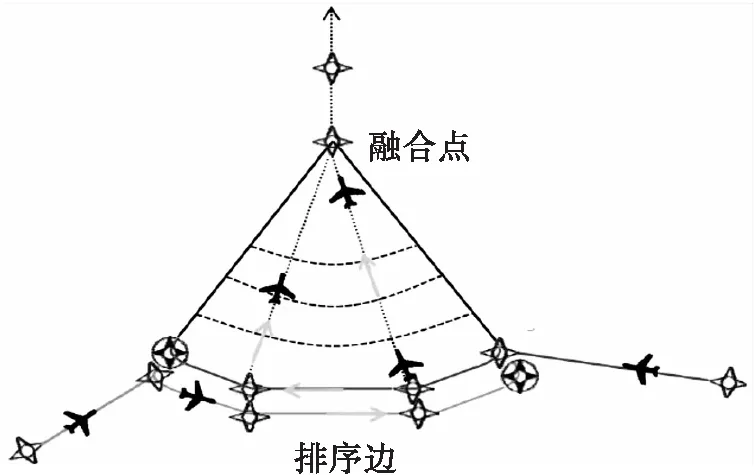
图1 点融合飞行程序结构图
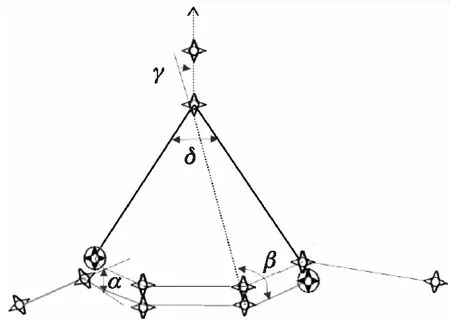
图2 点融合程序角度示意图
(1)进入角α:为了方便航空器切入点融合程序,进入点融合系统的第一个航路点应为旁切点,进入角度应小于90°。
(2)飞向融合点的转弯角度β:由于排序边和弧半径近似垂直,故β角常为90°。
(3)飞离融合点飞往下一航段的航迹变化角γ:在排序边飞行时,转弯时机的不同,γ角也不同,γ角最小可为0°,即飞离融合点进入下一航段时保持直飞无须调整航迹,γ最大不应超过90°。
(4)融合区范围角δ:δ角的大小和排序边的长度有关,δ角越大,融合区范围越大,点融合系统可容纳飞机的数量越多,容量越大,但需要的空域也越大。因此δ角需要根据可用空域情况和该区域流量的大小进行设计。
2 点融合程序的运行
2.1 基本运行方法
点融合程序设计的宗旨是方便管制员实现对航班流的精细化控制,避免使用传统的等待程序,造成飞机间隔过大,浪费空域[9]。其优点在于航班可自主有序地通过点融合程序,在雷达屏幕上给管制员一个直观化的进场交通流,有效减少陆空通话次数,提高运行效率。其运行步骤如下:
(1)以一定的管制间隔,建立排序边上航班飞行序列;
(2)达到规定的间隔后,向排序边上的航班发布“转弯直飞融合点”的指令;
(3)通过控制飞行速度和高度,保持融合区内的航班的顺序和间隔。
2.2 点融合程序运行要求
(1)空域要求。由于点融合系统在设置排序边和融合点时,均以基于性能的导航(PBN)程序的航路点为基础,因此设计点融合程序时,其空域应能够实施PBN程序且该空域为雷达管制空域,能够实施雷达引导。
(2)航空器及驾驶员要求。运行点融合程序的航空器需确保其机载设备满足运行RNAV-1的能力,且在其机载导航数据库中,已有最新的相应点融合程序可供使用[10]。航空器驾驶员需要能够熟练使用FMC中的LNAV功能,以保持其在排序边上的飞行。
(3)空管人员的要求。管制人员在指挥点融合程序运行前,需经过相应的培训且考核合格,能够熟练掌握点融合程序的运行特点和指挥技巧,能够有效应对突发情况和特殊情况。在程序运行过程中,管制员要注意实时监控融合区内的航班,当满足间隔标准时,对排序边上的飞机要及时发布“直飞”指令,避免指令过晚,浪费间隔。当终端区空域内点融合程序和其他管制程序同时运行时,管制员需特别注意:必要时应及时采取相应的管制手段,避免不同运行模式间产生飞行冲突。
2.3 特殊情况下的运行
(1)机载导航精度降低。当由于某种原因,导致飞机机载导航精度不能满足运行点融合程序的要求时,飞行员应当及时将情况报告给管制员,管制员应立即使其结束运行点融合程序并给予航空器雷达引导[11]。
(2)排序边溢出。若航空器经过点融合程序,在排序边上飞行时一直未收到直飞指令,则默认飞至排序边的最后一个航路点时可转弯飞至融合点,以应对排序边溢出,这种应对方式为被动应对;还可以将点融合程序和传统等待程序结合使用,以主动应对排序边的溢出。
在航空器进入点融合系统排序边之前的适当位置,设置传统的等待程序,用于限制进入排序边的流量使其不超过点融合程序的最大容量,从而有效应对排序边溢出,如图3(a)所示。也可在排序边末端一定空域内设置等待程序,以应对出现跑道临时关闭、前方空域临时限制等情况时有飞机仍在排序边上飞行,此时飞机需要飞完整个排序边然后进入等待程序进行等待,如图3(b)所示。
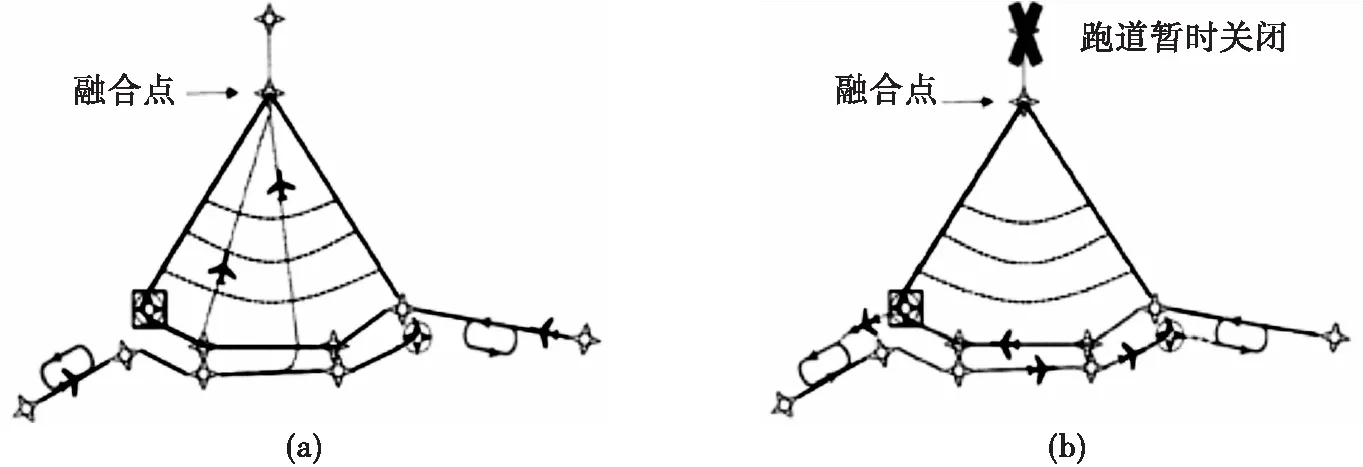
图3 点融合等待程序设计方案
3 点融合系统容量评估
根据点融合系统的结构,其容量主要有融合点的容量C1、融合区的容量C2和排序边的容量C3构成。航班流经过点融合系统后经融合点流向跑道,点融合系统就像一个蓄水池,融合点如蓄水池的放闸口,所以点融合系统消化航班的能力由C1、C2、C3中较小者决定,容纳航班的能力由C1、C2、C3中的较大者决定。下面以某机场的点融合程序为例,计算点融合系统的消化能力和容纳能力。
某机场有12L/30R和12R/30L两条跑道,运行模式为隔离平行运行,即:12R/30L用于起飞,12L/30R用于落地。以使用最频繁的12L跑道为例,其点融合程序如图4所示。
某机场进场航班流主要为北边从NOPIN进场,西边从P320进场,南边和东边汇聚后由KADMA进场,所以根据航班流情况,设置两条排序边,为了应对点融合系统溢出,在进入点融合系统前均设置了等待程序。考虑到空域状况,外排序边高度为2400 m,长度为35 km;内排序边高度2700 m,长度为25 km,为了使不同类型的飞机保持安全间隔,限制进入排序边的速度为407 km/h。融合点设置在IAF处,高度为1200 m,限制过融合点的速度为380 km/h。
根据雷达尾流间隔标准,前后均为重型航空器时,最小间隔为8 km;重型航空器在前,中型航空器在后时,最小间隔为10 km;重型航空器在前,轻型航空器在后时,最小间隔为12 km;中型航空器在前,轻型航空器在后时,最小间隔为10 km。考虑某机场以中型航空器运行为主,故在内排序边上的安全间隔均为10 km,外排序边两头为8 km间隔,其余为10 km间隔。
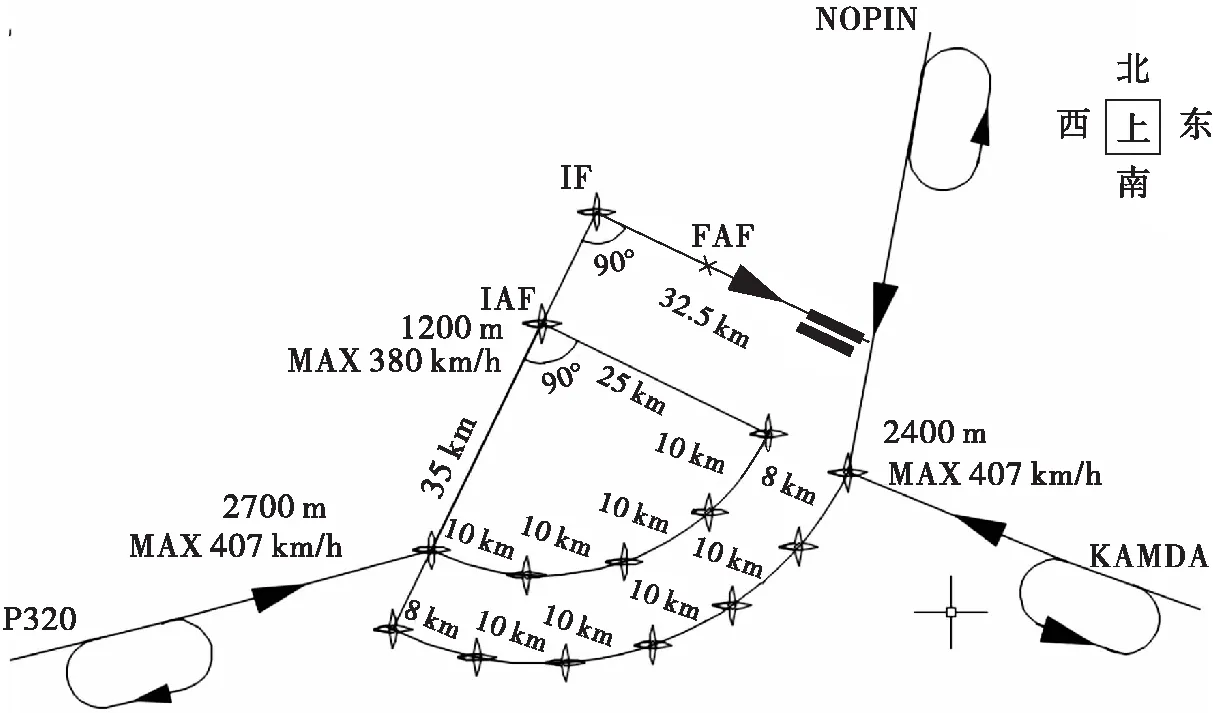
图4 某机场12 L跑道点融合程序
3.1 融合点容量计算
3.2 融合区容量计算
3.3 排序边容量计算
由此可见某机场12L跑道的点融合程序的消化航班的能力C消化=min{C1,C2,C3}=28,容纳能力C容纳=max{C1,C2,C3}=49。点融合系统的消化能力主要是受跑道容量的限制,当航班量小于C1时,航班不会产生延误,能够顺利通过点融合程序落地。当航班量大于C1小于C3时,点融合系统就发挥了其容纳航班的优势,使航班有序通过点融合系统,减少航班延误。当航班流量大于C3时,点融合系统会产生溢出和崩溃,所以运行时管制员要注意监控航班流量,及时使用外接的等待程序避免进入点融合系统的航班量大于C3。
4 结论
点融合系统作为一种航行新技术,现已广泛应用于空中流量较大的机场终端区。本文首先对点融合系统的基本结构及一些角度限制进行了介绍,为其他机场点融合程序的设计提供参考。其次从运行层面介绍了运行点融合系统时应注意的事项,以及一般运行和特殊情况下的运行方法。最后研究了点融合系统的容量评估,并以某机场为例,计算了该机场点融合系统的容量,对于该机场点融合系统而言,其消化航班的能力主要受跑道容量的限制,容纳航班的能力主要受排序边容量的限制。因此在程序运行时,管制员需注意监控进入点融合系统的航班流量,避免航班流量超过点融合系统的容纳能力,造成系统溢出和崩溃,影响运行。
