基于多星编队的GEO目标巡视策略
2022-08-01刘付成叶立军
刘付成, 叶立军
1. 上海市空间智能控制技术重点实验室,上海 201109 2. 上海航天技术研究院,上海 201109 3. 上海航天控制技术研究所,上海 201109 4. 清华大学 航天航空学院,北京 100084
0 引 言
随着人类航天活动逐年增加,在轨空间目标(含碎片及飞行物)也越来越多,据估计,目前直径1 cm以上的在轨空间目标超过75万个[1],航天器之间碰撞风险与日俱增.因此,世界上几个航天大国对空间目标态势感知研究力度都在加强[2-15].目前,美国在空间目标态势感知方面的研究最深,其空间态势感知系统可对直径大于10 cm的低轨目标进行探测,定轨精度优于500 m,截止2016年,美国已经实现了对约1.6万个直径大于10 cm的空间目标的编目[2,5].
空间目标态势感知主要分为地基态势感知和天基态势感知两大类,两者各有优劣,互为补充[4],地基态势感知主要是通过雷达和望远镜等实现对空间目标的定轨及编目[2-3,5-7],天基态势感知主要是通过将各种探测载荷装在卫星上,通过卫星对空间目标进行观测[5-7,16-23].天基态势感知的热点对象之一,是空间资源最为紧张的地球同步轨道(简称GEO)卫星,GEO是空间中的战略要地,其上运行着各国的导弹预警卫星和军事通信卫星等核心空间系统,因此对GEO目标观测能力尤为重要,
美国空基空间监视系统(SBSS)第一颗低轨卫星探路者于2010年9月成功入轨,该项目可实现对GEO带上的目标每天至少一次探测[2,19],美国于2006年6月发射两颗微卫星技术试验卫星(micro-satellite technology experiment,简称“MiTEx”),分别为MiTEx-A,MiTEx-B,两星质量均为225kg,运行于准GEO,完成对GEO目标的巡视任务[18].2014年7月,美国以“一箭三星”方式成功将2颗编号为USA-253和USA-254的GEO态势感知卫星(简称GSSAP)和1颗技术试验卫星“评估局部空间自主守卫纳卫星”(ANGELS)送入GEO[12].此次发射任务的成功标志着美国对GEO目标侦察能力快速提升,走向成熟[14].2016年8月,美国以“一箭双星”方式成功将编号为USA-270和USA-271的GSSAP卫星送入GEO[12],与先期入轨的两颗GSSAP卫星在轨组网,为美军提供执行太空作战所需的空间态势感知能力,大幅提高美国对GEO目标的持续监视与抵近侦查能力[14].2022年1月,美国又以“一箭双星”方式成功将两颗GSSAP卫星送入GEO[20],持续加强美军对GEO目标的态势感知能力.
因此,从美国天基态势感知发展来看,构建GEO天基光学成像观测卫星系统是对GEO目标巡视普查和抵近观测的有效手段和重要发展方向[12,16-18,21].
国内外有学者对GEO目标态势感知技术进行了研究.美国洛马公司提出GEO空间目标监视纳卫星星座计划,并分别对9星,18星,27星星座配置方案进行初步效能分析[4];肖余之等[16]详细阐述了单星对GEO目标多方位多角度成像技术;程瑞等[17]详细介绍了基于相对运动的GEO目标精确成像跟踪方法;杨自兴等[15]预测GEO目标态势感知从单星向星座发展;宋博[12]对GEO目标态势感知多星组网侦查方案进行了若干猜想;宋瑞等[16]关注到GSSAP的双星互补的侦查手段以及基于时间交叉的方式对同一目标抵近策略.
综上,目前关于GEO目标态势感知技术研究成果大致可分为两类:第一类研究多星组网对GEO目标观测方案,定性描述多星组网的优点,但并未介绍多星组网对效能的提升水平,也未给出具体组网策略和设计方法;第二类研究单星对特定GEO目标观测成像技术,未考虑对部分GEO目标存在观测盲区的问题.总之,目前还没有学者分析多星串行编队对于GEO目标巡视效能提升的原理、量化效果及多星串行编队参数设计方法.
1 GEO目标态势感知示例
1.1 MiTEx使用案例
以MiTEx空间飞行器为例介绍GEO目标巡视卫星(简称巡视星)的典型工作方式,MiTEx空间飞行器外形[15]如图1所示.
图1中从左到右分别为上面级、MiTEx-A和MiTEx-B,国内蒙波等学者整理了MiTEx双星寿命期内飞行过程[13]:MiTEx双星入轨后直到2009年初,有两年半时间运行在低于GEO轨道1012 km的准GEO,MiTEx-A与MiTEx-B保持100~200km的相对距离,互相观测,卫星星下点经度每天向东漂移约13.4°,每27天时间即可完成对一整圈GEO带内卫星的自西向东相对飞行.

图1 MiTEx空间飞行器Fig.1 MiTEx spacecraft
从2009年初到2013年,MiTEx-A一直运行在低于GEO轨道50 km左右的准GEO,执行对GEO目标的观测.其中,MiTEx-B于2009年初变轨至高于GEO轨道400 km的坟墓轨道,成为废弃卫星或执行对坟墓轨道航天器的态势感知任务.
在完成对GEO带内卫星多圈巡视后,MiTEx-A卫星在2011年1到8月份频繁进行轨道机动,反复穿越GEO轨道,始终保持在65.6~78.4°E(中亚地区)上空,对这一区域的GEO目标进行了反复观测.
1.2 GSSAP使用案例
GSSAP是美军机密项目,是MiTEx计划的升级版[15],用于为美国战略司令部监视GEO目标的碰撞威胁,以及获取潜在对手GEO目标在轨工作情况,GSSAP双星及其上面级如图2所示[12].
图2 GSSAP空间飞行器Fig.2 GSSAP Spacecraft
GSSAP目前已完成6星组网,形成实战能力.GSSAP除了具有MiTEx卫星的巡视探测功能外,还具有针对重点目标的抵近侦查功能.有学者统计,从被GSSAP抵近的次数来看,排名前四的国家(区域)依次为美国、中国、欧洲和俄罗斯[18],抵近次数占比依次为27%、19%、13%和10%.
2021年7月,美国编号为USA-271的GSSAP卫星曾接近在GEO正常运行的“实践二十号”卫星并伴随飞行[22],GSSAP卫星与实践二十号卫星最近距离不到30km,远小于国际公认的50km的安全距离门限,可认为是GSSAP卫星对GEO目标进行的一次典型抵近侦查动作.
1.3 巡视星工作原理
根据MiTEx和GSSAP对GEO目标巡视功能分析,可得到GEO目标巡视原理图如图3所示.
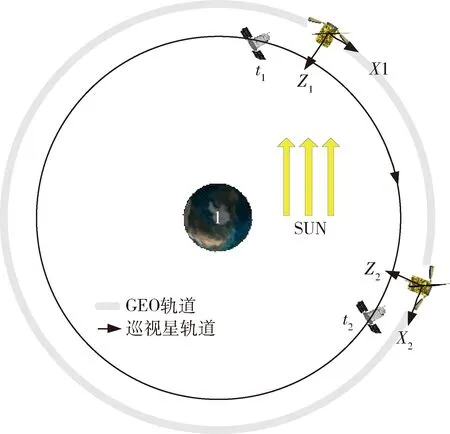
图3 GEO目标巡视原理图Fig.3 Patrol schematic diagram of GEO targets
图3中:在t1时刻,巡视星指向GEO目标的-X面和+Z面,在t2时刻,巡视星指向GEO目标的+X面和+Z面,形成多方位成像;在t1时刻,太阳照射GEO目标的+X面和+Z面,在t2时刻,太阳照射GEO目标的+X面和-Z面,形成多角度成像.
绝大部分GEO目标载荷布局在+Z面,采用低于GEO轨道的巡视方案,巡视星位于GEO目标下方,可持续对GEO目标的载荷成像,方便地面对GEO目标的健康状态和任务特点进行分析和辨识.
2 GEO目标巡视效能分析
对GEO目标巡视的目的是判定GEO目标的用途和能力,而GEO目标有效载荷大多指向地球,为了方便观察GEO目标有效载荷情况,一般选择采用低于GEO的准GEO作为巡视轨道.不失一般性,本文假设巡视星轨道倾角和轨道偏心率均可近似为0,因此GEO目标轨道倾角也就是GEO目标相对于巡视星的轨道倾角.
在GEO轨道各种环境作用力干扰下[23-25],约98%的GEO目标轨道倾角处于0~15°范围[26],大多数GEO目标轨道倾角保持在0.1°以内[27],当GEO目标轨道倾角较小时分析轨道面内成像条件,当GEO目标轨道倾角较大时分析轨道面外成像条件.
2.1 轨道面内成像
分析轨道面内成像规律,可假设巡视星和GEO目标轨道倾角和偏心率均为0,巡视星比GEO轨道高度低,巡视星相对GEO目标自西向东漂移,巡视星(单星)在中午12点经过某GEO目标正下方时,GEO目标成像角度如图4所示.

图4 单星对GEO目标成像角度Fig.4 Imaging angle of GEO targets by single satellite
图4描述了轨道面内巡视星和GEO目标序列的位置关系,图4中,λ为巡视星每天漂移经度.随着巡视星漂移,其所经之处的GEO目标地方时呈现以天为周期的连续变化,巡视星对GEO目标成像角度也会相应变化.当漂移量达到λ时,巡视星星下点地方时又回到初始状态,形成一个完整漂移周期(漂移周期约为1个太阳日).
不妨令巡视星星下点地方时hλ=0 h时,所对应的相对星下点经度λ0=0°,太阳入射角θλ=0°,则
(1)
(2)
式中,λ0∈[0,λ]为某GEO目标对应的相对星下点经度,单位:rad.
相对星下点经度漂移速率(单位:rad/s)为
(3)
式中:n=7.2921×10-5rad/s为地球平均自转角速度,单位rad/s;Δa为巡视星与GEO目标轨道高度差(简称“巡视高度差”),单位为km,a=42166 km为GEO目标轨道半长轴.
星下点经度每天漂移角度λ约为
(4)
其中,Td=86400 s为1个太阳日时长.
完成对所有GEO轨位的完整巡视即为1个全球巡视周期T(单位:s)
(5)
地方时为0 h(24 h)附近时,巡视星对GEO目标成像为顺光(忽略地球遮挡因素),对GEO目标成像效果较好;地方时为12 h附近时,巡视星对GEO目标为逆光成像,对GEO目标成像效果较差,这种情况称之为巡视星对GEO目标的成像盲区.特别地,当巡视星和GEO目标地方时为12 h,且巡视星处于GEO正下方时,此时对GEO目标成像效果最差,甚至可能因太阳光直射,导致巡视星探测器损坏.
一旦巡视星轨道高度和初始位置确定,GEO目标各站位的成像角度也随之确定.由于成像盲区,一个全球巡视周期无法实现对GEO目标所有站位有效巡视.通过多个全球巡视周期的接力巡视,且配合全球周期巡视初始相位调整,才能完成对所有GEO目标的有效巡视.
工程上,GEO目标是以离散的形式分布在轨道上,在不考虑探测距离约束时,一个漂移周期Td,巡视星可观测到的目标数N为
(6)
其中,Δλ为GEO相邻两个GEO目标下点经度差的平均值,单位:rad.
平均每个目标观测时长tC(单位:h)为
(7)
GEO目标间平均距离d(单位:km)为
d=aΔλ
(8)
对某GEO目标观测期间,轨道面内成像角度主要和两个因素有关:第一是太阳光照角变化,太阳光照角定义地心与卫星连线方向到太阳矢量方向夹角在赤道面投影;第二是两星轨道面内相对运动带来的观测方位变化.
太阳光照角变化范围θs(单位:rad) 为
(9)
因两星相对运动产生对目标观测方位变化范围θd(单位:rad) 为
(10)
以低于GEO轨道高度的巡视星对某GEO目标观测为例,其观测过程及其光照情况变化如图5所示.

图5 对某GEO目标成像示意图Fig.5 Imaging angles of GEO target
图5中,巡视星比GEO目标低50 km,即Δa=-50 km;星下点每天漂移角λ为0.64°,1个全球巡视周期T约为562天;若Δλ为0.1°,则每天可观测目标数N=6.4,平均每个目标观测时长tC=3.8 h;GEO目标间平均距离为d=73.6 km,太阳光照角变化范围θs为56.2°;因两星相对运动产生的对目标观测方位变化θd为72.7°.
2.2 轨道面外成像
少数GEO目标轨道倾角大于0.1°,在需要分析其轨道面外的成像规律.与轨道面内成像角度类似,轨道面外成像角度也主要和两个因素有关:第一是太阳光照角变化;第二是两星相对轨道倾角引起的轨道面外运动带来的观测方位变化.
轨道面外太阳光照角为太阳高度角,随季节变化以年为周期,在±23.5°范围内变化,由于太阳高度角变化范围小,且变化慢,在粗略分析GEO目标光照特性时可近似认为太阳高度角为0.
GEO目标相对巡视星的偏心率矢量会引起相对运动速度以天为周期的东西向波动[27],因此忽略偏心率偏差引起变化不影响轨道面外成像平均效果.GEO目标相对巡视星运动轨迹在当地水平面(轨道系XOY平面)的投影如图6所示.
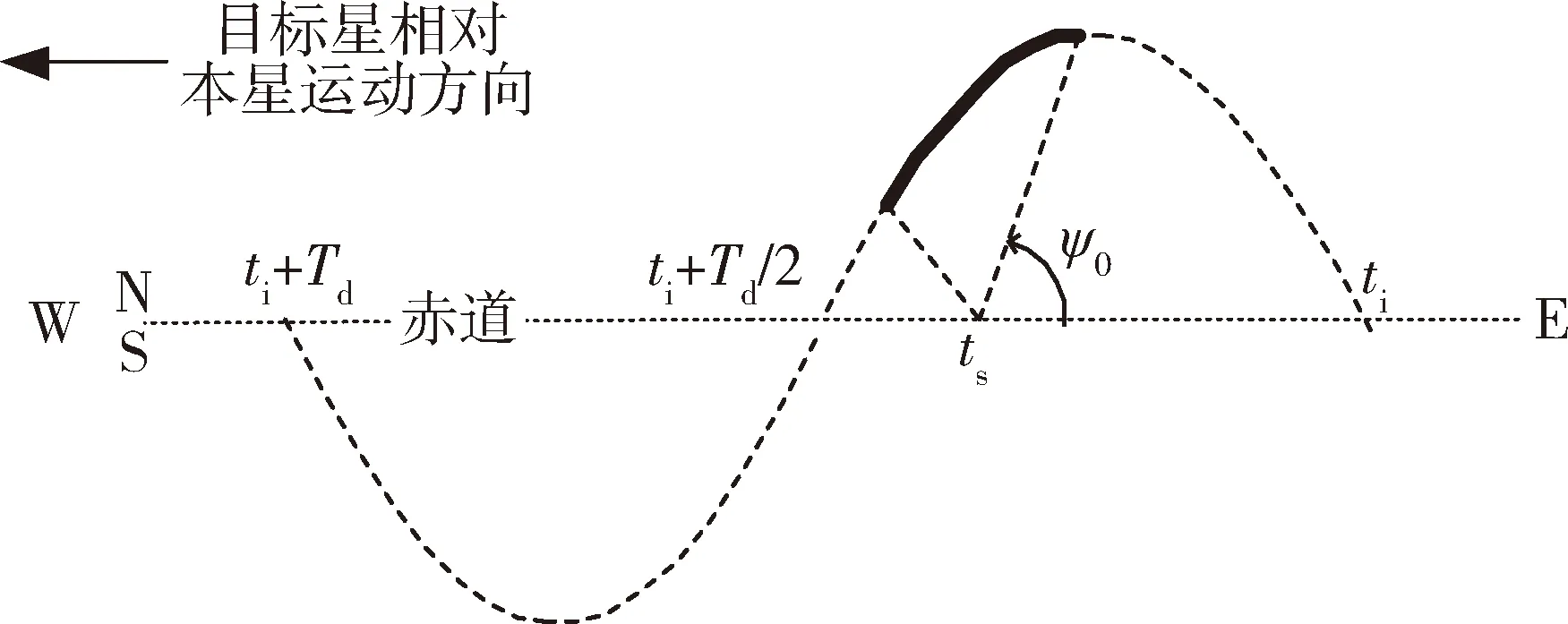
图6 对大倾角GEO目标跟踪成像Fig.6 Tracking and imaging of GEO targets with large inclination
图6描述了轨道面外巡视星和GEO目标序列的位置关系,图6中,巡视星固定不动,GEO目标以正弦运动方式自东向西运动,ti为GEO目标相对巡视星的相对升交点[28]时刻.ts为GEO目标通过巡视星正上方时刻.
定义轨道面外观测方位角:从东偏向北方向为正,指向正东时观测方位角为0,则本次GEO目标进出巡视星成像范围的观测角分别为ψ0和ψt

(11)
其中,i为GEO目标轨道倾角,单位:rad.
2.3对GEO目标成像概率
GEO目标成像概率定义:对于某一指定GEO目标轨道倾角i0的GEO目标,其进入巡视星探测范围的时间与分配给该GEO目标的时间之比见图7.

图7 对GEO目标成像概率示意图Fig.7 Schematic diagram of imaging probability of GEO targets
图7描述了轨道面外巡视星和GEO目标序列的位置关系,图7中,巡视星固定不动,GEO目标以正弦运动方式自东向西运动,粗实线部分即为进入巡视星探测范围区域,GEO目标成像概率η定义为1个漂移周期Td内进入巡视星探测范围区域与巡视星漂移区域之比,具体为
(12)
其中,D为巡视星探测范围,单位:km,满足条件:|D|>|Δa|.
根据式(12),当巡视星探测范围D足够大,或GEO目标倾角i0足够小时,对GEO目标成像概率为1.
但实际上,巡视星探测范围D与对目标星成像条件有关,GEO目标在巡视星相机的成像条件越好,探测范围D就越大.当GEO目标轨道倾角i0较小时,探测范围D主要受成像盲区影响而变小,成像概率也相应降低,因此若解决成像盲区问题,成像概率低的问题也随之解决;当GEO目标轨道倾角i0较大时,GEO目标大部分时候处于巡视星的两侧,可忽略成像盲区对成像概率的影响,因此,GEO目标大倾角时,探测范围D可近似认为常值,成像概率主要与探测范围D和倾角i0有关.
通过上述分析可知,对于轨道倾角较小的GEO目标,成像效果主要受逆光观测带来的成像盲区影响;对于轨道倾角较大的GEO目标,成像效果主要受捕获概率小的影响.受光照条件和成像概率影响,单颗巡视星对GEO目标态势观测效果差.针对该问题,本文设计了一种多巡视星串行编队的巡视策略,并给出对应串行编队参数的设计方法.
3 效能提升策略
3.1 成像盲区问题
定义当巡视星对GEO目标成像太阳光照角(简称太阳光照角)θL∈[0,π],为当巡视星看向GEO目标时,太阳矢量与巡视星探测器视场轴线间的夹角;定义巡视星对GEO目标成像的太阳抑制角 (简称太阳抑制角)φ0∈[0,π],当太阳光照角θL小于太阳抑制角φ0时,巡视星不可对GEO目标成像,为巡视星对GEO目标的成像盲区;反之,巡视星可对GEO目标成像. 举例说明,若φ0=0,表示巡视星探测器性能极好,当太阳正照射探测器,仍可正常对GEO目标成像,无盲区;若φ0=π,表示巡视星探测器性能极差,不论GEO目标太阳光照角如何,均无法对GEO目标成像,全盲区.
采用多巡视星串行编队方式,且多巡视星相位等间隔均布,可有效地解决2.2节出现的轨道面内成像盲区的问题.编队需要最少的巡视星数m1为

(13)
解决GEO目标小轨道倾角成像盲区的问题,需要多星串行编队,两相邻串行编队卫星距离d1(单位:km)需满足
(14)
其中,M1为非负整数,表示串行编队的卫星间隔的漂移周期数.
结合式(3)、(4)和(14),有
(15)
为了方便多巡视星对同一GEO目标进行观测,也为了方便巡视星之间的信息交互,希望|d1|最小(下同),定义消除盲区的两相邻巡视星间编队距离d1
(16)
要实现最短时间(一个全球巡视周期)内对全球GEO目标的巡视,根据式(13)有m1=3,d1=157km,此时三巡视星串行编队方式执行小轨道倾角GEO目标巡视任务如图8.

图8 三星串行编队的GEO目标轨道面内巡视Fig.8 Patrol of GEO targets in plane with triple satellites serial formation
图8中,采用三巡视星串行编队,巡视星成员间距离157km(对应1/3漂移周期),对于任意小倾角GEO目标,均有巡视星可对其成像观测,三巡视星相互之间观测角度形成互补,每个巡视星的观测盲区均被消除.
三星串行编队巡视方案,进而大幅缩短短对GEO目标的巡视观测时间,对全球GEO目标的重访周期从1686天压缩至562天.
采用多星串行编队的方式,有利于形成对GEO目标多方位多角度立体成像,能获取更丰富的GEO目标成像信息.
3.2 成像概率低问题
对于任一指定倾角i0的GEO目标,采用多巡视星串行编队方式,如图7,若在0.5个漂移周期对应经度范围内均布m2颗巡视星,则其必然会进入某一颗巡视星的探测范围,使成像概率达到编队所需要最少的巡视星数m2为
(17)
解决GEO目标大轨道倾角对成像概率低的问题,需要多星串行编队,当m2≥2时,两相邻串行编队卫星距离d2(单位:km)需满足
(18)
结合式(3)、(4)和(18),有
(19)
举例说明,巡视高度差Δa=-50 km,巡视星探测距离D=300 km,GEO目标轨道倾角i=1°,根据式(12),巡视星对GEO目标成像概率为η=0.83,无法实现百分之百覆盖.
要具有对轨道倾角为1°以内的GEO目标百分之百成像的概率,根据式(17),有m2=2,d2=118 km.此时双巡视星串行编队方式执行大轨道倾角GEO目标巡视任务如图9所示.
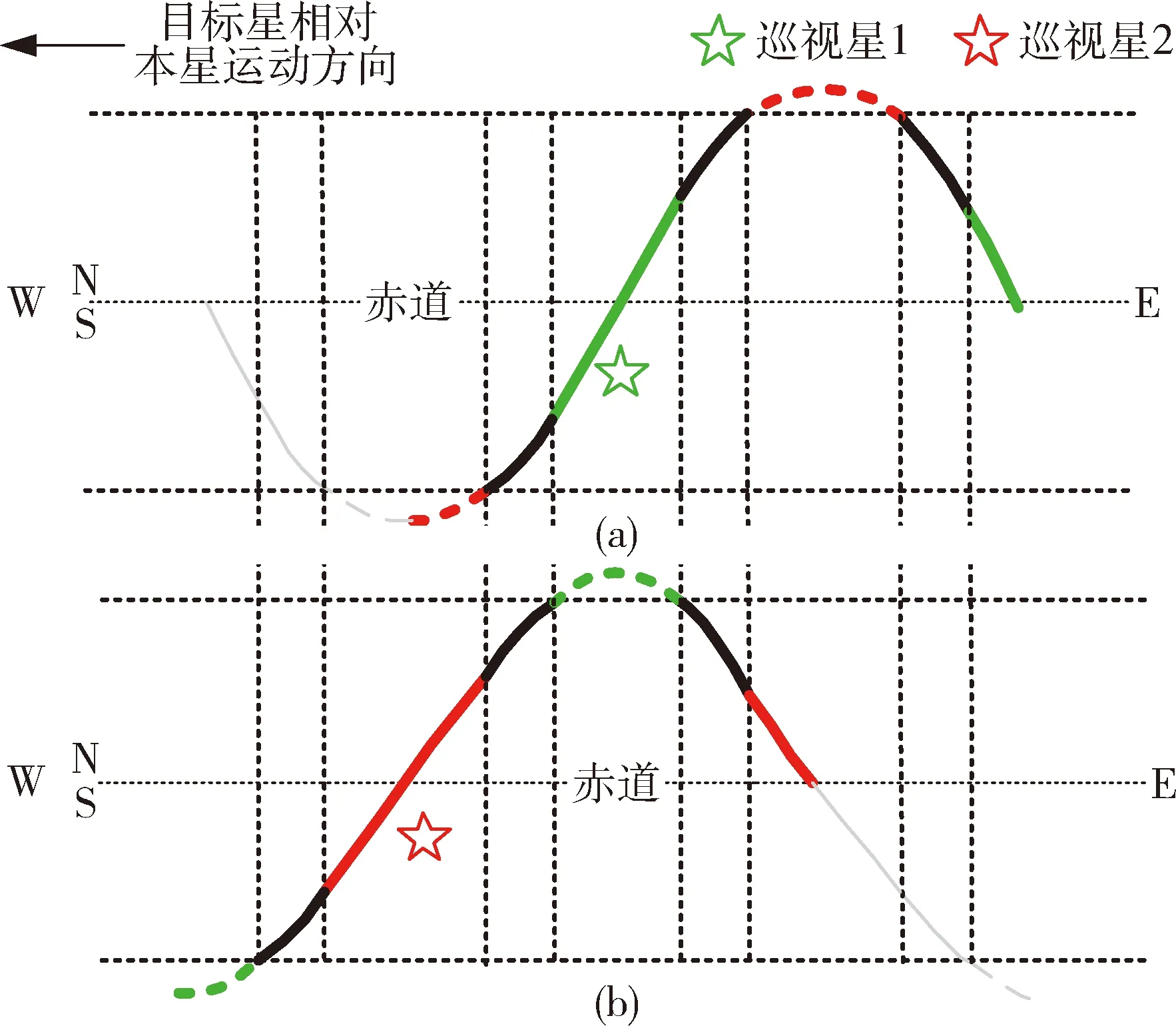
图9 双星串行编队的GEO目标轨道面外巡视Fig.9 Patrol of GEO target out of plane with dual satellites serial formation
图9中,采用双巡视星串行编队,双巡视星相距118 km(对应1/4个漂移周期);图9(a)为某GEO目标相对巡视星1的相对运动曲线在水平面投影,图9(b)为该GEO目标相对巡视星2的相对运动曲线在水平面投影;绿色实线代表仅可被巡视星1成像的部分,绿色虚线代表巡视星1无法被成像部分,红色实线代表仅可被巡视星2成像的部分,红色虚线代表巡视星2无法被成像部分,黑色曲线代表可以同时被双巡视星成像部分.
初始时刻,GEO目标相对巡视星1的相对运动轨迹如图9(a),巡视星1无法对GEO目标成像(红色虚线),表示该GEO目标不再巡视星1的探测范围内;经1/4个漂移周期(6h)后,GEO目标相对巡视星2的相对运动轨迹如图9(b),图9(a)的红色虚线变为图9(b)的红色实线,表示该GEO目标进入了巡视星2的探测范围,可实现对指定轨道倾角GEO目标的全覆盖.
此外,对于同时可被双巡视星成像的的GEO目标,由于存在90°相位差,观测到此GEO目标的太阳入射角相应偏转了约90°;GEO目标与巡视星的相对位置在水平面投影也变化i0a,双巡视星可形成对此GEO目标的多角度多方位立体成像.
3.3 综合效能提升
3.1和3.2节仅介绍了单项效能提升方法,要同时解决成像盲区和指定倾角GEO目标成像概率低的问题,所需要最少的巡视星数m3为

(20)
第k颗巡视星与第1颗巡视星距离li(单位:km)为:
(21)
结合式(3)、(4)和(21),有
(22)
举例说明,巡视高度差Δa=-50 km,对不同太阳抑制角φ0,不同巡视星探测范围D,针对不同的GEO目标轨道倾角i0,巡视星串行编队参数设计如表1.
总之,巡视效能要求越高,所需巡视星数量越多;反之,巡视星数量越多,可达的巡视效能也越高.
工程上,可结合载荷性能指标,巡视效能需求和巡视星数量对串行编队构型进行综合最优设计.

表1 巡视星串行编队参数设计Tab.1 Serial formation parameters design of the patrol satellites
3.4 GEO目标定轨与编目
对GEO目标成像,即可获取对目标的相对测角信息,但由于观测量中距离信息缺失,仅使用测角信息则相对导航系统中相对距离状态可观测度严重下降,估计误差较大,容易出现滤波发散,因此很难实现在轨对GEO目标的快速高精度定轨与编目[29-30].
采用多巡视星(含双星)串行编队的方案,多星在不同方位同时对某GEO目标成像并测角,巡视星间采用星间链路信息交互,可实现多视线测角相对导航.
与仅测角相对导航系统相比,多视线测角相对导航状态完全可观,可显著提升相对导航算法可观测度和精度[29],通过理论分析与数学仿真证明,相对于单视线仅测角相对导航,采用双视线仅测角相对导航精度可提升约8倍,定轨位置精度达到84m,满足对GEO目标定轨与编目需求.
因此,采用多星串行编队的方案,还可以大幅增加对GEO目标相对导航可观测性,进而可大幅提升对GEO目标定轨与编目的有效性.
4 结 论
本文提出了一种多巡视星串行编队方式,对GEO目标进行观测,在以下几方面有比较突出的优势:
1)可大幅减小或消除对GEO目标的成像盲区;
2)有助于对同一目标多方位、多角度成像;
3)有助于提高对大倾角GEO目标的成像概率;
4)多巡视星可实现对GEO多视线仅测角的相对导航,可显著提升对GEO目标定轨算法可观测度和精度,实现对GEO目标定轨与编目需求.
