美国GSSAP卫星观测模式分析与研究
2022-08-01王典军武冠群经姚翔刘崇华尚霄宇
王典军, 武冠群, 韩 璐, 经姚翔, 刘崇华, 尚霄宇
北京空间飞行器总体设计部,北京 100094
0 引 言
地球同步轨道(GEO)是太空中的战略要地,其上运行着各国的高价值核心太空系统,因此对GEO目标的观测尤为重要.
美国曾于2006年秘密发射了2颗“微卫星技术试验”(MiTEx)卫星,演示验证了地球同步轨道巡视卫星技术.美空军在MiTEx卫星基础上提出了“地球同步轨道空间态势感知计划”(geosynchronous space situational awareness program, GSSAP),与低轨SBSS卫星构成综合天基空间目标监视体系,大幅提升高轨目标的探测精度和频度,获取目标的技术情报,分析目标用途,判断空间活动意图.
GSSAP项目一直被美军严格保密,直到2014年2月,美国空军航天司令部司令谢尔顿在一次讲话中高调宣布,美军将在2014年发射2颗GSSAP卫星,外界才知晓其存在.但当问及公开的原因时,谢尔顿将军称,“希望表明我们实际上正在观察GEO轨道上发生了什么——非常近地观察.它将有望产生威慑和劝阻影响”.美军并未公开卫星技术途径与载荷参数等核心信息,仍处于保密状态.
GSSAP卫星日常运行在近地球同步轨道,利用与地球同步轨道的相对漂移进行轨道巡视,对目标进行探测、编目和精确侦察,必要时还能通过轨道机动抵近地球同步轨道目标进行抵近详查,获取目标高清图像[1-3].
世界安全基金会发布的《全球太空对抗能力:开源评估》数据称,GSSAP卫星自2014年以来已被监测到实施了数百次机动,并对数十颗GEO卫星实施了抵近操作,采用方式为多次快速、小幅轨道机动.
本文针对GSSAP卫星设计进行了分析,并深入分析了GSSAP卫星机动策略,相关研究可用于我国后续在轨服务、空间碎片监测与清除任务.
1 GSSAP卫星简介
1.1 航天器概况
GSSAP是美国空军部署在地球同步轨道的最新一代空间态势感知卫星,主承包商轨道科学公司(orbital sciences corporation).星上搭载光电成像传感器,能够近距离对部署在同步轨道带上的航天器进行精确跟踪和特征识别.卫星具备GEO巡视探测和抵近详查能力,可提供准确的太空目标轨道和特征数据,增强美国高轨态势感知能力[4-6].
目前GSSAP卫星六星在轨,两颗一组分别在2014年7月28日、2016年8月19日、2022年1月22日发射.
截止2022年4月17日,根据公布数据,GSSAP-1目前轨道半长轴为43179 km (GEO+1015 km),倾角为1.44°;GSSAP-2目前轨道半长轴为42490 km (GEO+326 km),倾角为0.75°,推测GSSAP-1/2两颗星处于退役再利用状态.GSSAP-3和GSSAP-4目前轨道的半长轴大多数时间在GEO±50 km,倾角在0.3°以内,地理经度大多数时间在东经10°到180°范围内,对亚太区域GEO带航天器有一定威胁.
GSSAP-5和GSSAP-6发射任务为美国天军任务-8(USSF-8),采用宇宙神-5(511)火箭,2022年1月22日从佛罗里达州卡纳维拉尔角发射场天军站一箭双星发射,其有效载荷为2颗GSSAP卫星(GSSAP-5和GSSAP-6).火箭上面级3次点火直接将两颗卫星送入准地球同步轨道,到达轨道后,依次释放GSSAP-5和GSSAP-6卫星.

图1 宇宙神-5(511)火箭飞行过程示意图Fig.1 Atlas V-511 flight process diagram
1.2 在轨应用概述
2014年7月28日,GSSAP-1/2卫星发射后,进入地球静止轨道附近的运行轨道,轨道倾角0.5°,并在地球静止带上方和下方漂移.入轨初期在轨测试阶段每天移动2.36°,漂移周期大概154天,可观测位于GEO轨道上的所有卫星.
2016年8月,美空军调用一颗GSSAP卫星进行机动变轨,抵近详查美海军发射时遇到故障的“移动用户目标系统-5”(MUOS-5)卫星以确定其故障原因,美军方也是在这次事件中首次公开承认GSSAP具有交会对接能力.
由俄罗斯科学院控制的ISON太空空间监测网络公开的数据表明,自2014年以来,GSSAP卫星进行了数百次机动,在地球同步轨道上以10~15 km的距离靠近了12颗正在运行中的卫星或为接近它们实施变轨机动.这些卫星包括俄罗斯民用航天器“Ekspress-AM8”(2017年7月)和“光线”(2017年9月)以及军用卫星“钟声”(俄罗斯代号“宇宙-2520”,2017年10月),“彩虹-1M3”号(2017年11月),“彩虹-1M2”号(2018年5月).

图2 俄罗斯发布的GSSAP侦察图Fig.2 GSSAP investigation map released by Russia
此外,GSSAP卫星于2016年9月靠近中国通信技术试验卫星一号,并于2017年9月接近巴基斯坦Paksat-1R和尼日利亚Nigcomsat-1R卫星[7].
1.3 GSSAP卫星设计研判
关于GSSAP卫星设计细节尚未公布,但根据其运载、应用方式、少数公开图像等信息,可对GSSAP卫星设计进行合理研判.
GSSAP-1~GSSAP-4由Delta4-M+(4,2)火箭发射[1-7],该型火箭整流罩直径4 m,长11.75 m,考虑GSSAP卫星以一箭双星的方式并排安装在整流罩内,如图2所示,则GSSAP卫星本体的几何外形尺寸约为1 m×1 m左右.
经调研,Delta4-M+(4,2)运载送入GEO轨道的能力2208 kg;ANGELS卫星质量约为70-100 kg;星箭对接环(PAF)的质量为240-418 kg,次级载荷分配器(ESPA)的质量为181 kg;可得单颗GSSAP卫星的质量约为650-700 kg[2].
轨道科学公司在90年代末推出了GEOStar-1和GEOStar-2卫星平台,推测GSSAP卫星采用了GEOStar-1平台.GEOStar-1平台是GEO轨道(兼顾MEO)任务设计的紧凑型敏捷高性能平台,设计寿命5-8年;可承载有效载荷150 kg[2],平台功率500-1500 W,采用310 s比冲的双组元主发动机,位置保持可采用单组元推进模式,总速度增量不低于1000 m/s[2];
根据公开图像资料,GSSAP卫星采用双翼太阳阵构型且在太阳阵展开三角架上粘贴电池片,估算帆板总面积约6 m2,整星峰值功耗预估不超过1200 W.
GEOStar-1平台资料显示,载荷数据下行链路采用X频段(可选Ka频段),最大下传速率100 Mbps.外网公布的GSSAP卫星图像资料显示安装有反射面天线,用于光学图像数据的下传.GSSAP卫星在同步轨道巡视,经度位置不确定,为了满足对地数传的要求,数传天线指向范围至少需要半球指向范围.GSSAP图像显示数传天线与本体相距较远,转动范围满足较大指向范围要求.
GSSAP卫星从外形观察为一体结构,推测光学相机未安装转台,对目标跟踪均采用平台机动.卫星姿态确定采用星敏加陀螺模式,姿态指向精度0.023°;姿态控制采用反作用轮,姿态机动速度1.0(°)/s;姿态抖动最大为1 μrad.采用GPS接收机实现测轨功能,位置精度小于50 m.
GSSAP-1~GSSAP-4为清晰观测空间目标,多次抵近目标25 km内[7-8],说明其光学载荷成像分辨率不高.成像相机视场通常较小(保证成像分辨率),为确保任务期间对目标的快速捕获,通过安装大视场捕获相机用于对目标的捕获跟踪.由于光学观测存在阳光规避角的问题,GSSAP对目标观测通常为顺光,后期GSSAP观测或测量可能考虑非光学设备或者采用规避角更小的观测设备.
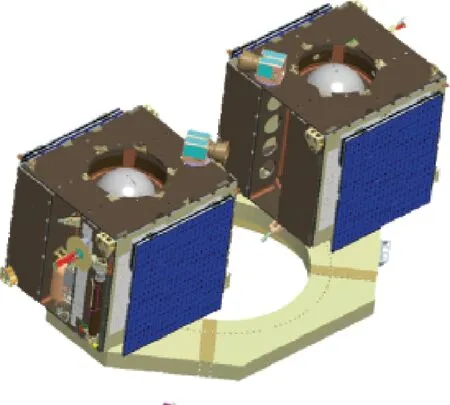
图3 GSSAP一箭双星运载布局示意图Fig.3 GSSAP carriage layout diagram

图4 GEOStar-1卫星平台Fig.4 GEOStar-1 satellite platform
2 GSSAP机动模式分析研究
2.1 GSSAP卫星运行轨道分析
在轨长期运行期间,GSSAP卫星运行于GEO轨道,轨道高度在GEO±50 km以内变化,形成相对GEO轨道的向西漂移或向东漂移的巡视模式[9].
GSSAP-5和GSSAP-6发射前,GSSAP四星在轨分工明确:GSSAP-1早期执行全球巡视详察,目前已位于坟墓轨道;GSSAP-2早期执行东经120°到西经0°的区域巡视控守,目前全球区域漂移;GSSAP-3执行东经0°到东经100°的区域巡视控守;GSSAP-4执行东经50°到东经180°的区域巡视控守.
根据公布的轨道数据,分析近3年GSSAP-3、GSSAP-4的轨道变化情况如图5所示.

图5 近3年GSSAP-3和GSSAP-4轨道变化情况Fig.5 GSSAP-3 和GSSAP-4 orbit changes in recent 3 years
2.2 GSSAP卫星机动策略分析
结合GSSAP-4的轨道变化情况,分析GSSAP-4对空间某一目标抵近观测过程.初始时刻GSSAP-4利用轨道高度差漂移接近目标;后期,GSSAP-4通过多次轨道机动抵近目标,并调整接近目标时光照条件.根据轨道数据分析,GSSAP-4轨道半长轴(42214 km→42197 km→42192 km)逐渐减小,并调整轨道偏心率,逐渐接近目标.
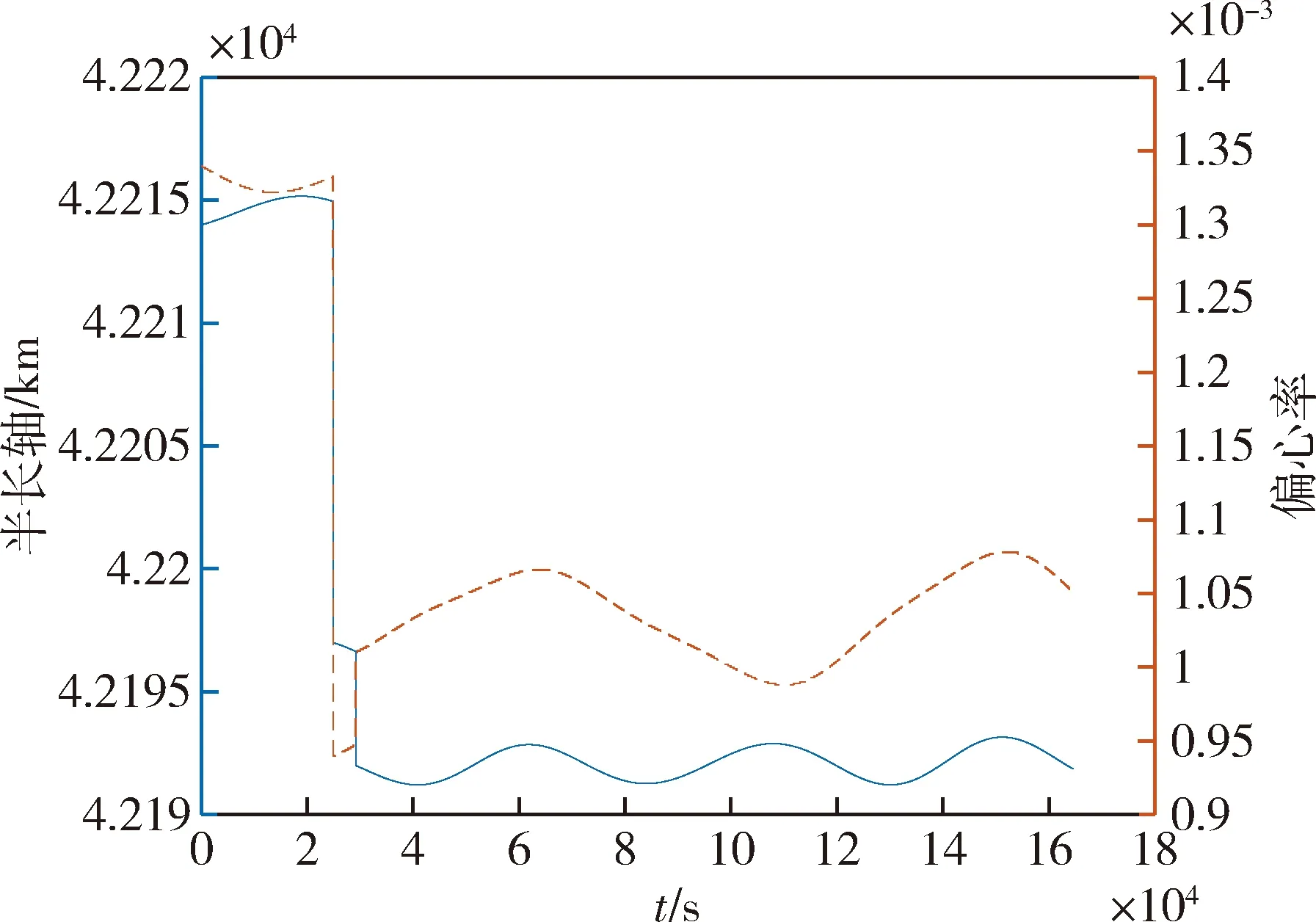
图6 GSSAP-4对空间某一目标抵近观测Fig.6 GSSAP-4 approach observation for a space target
在在轨服务、空间碎片监测与清除任务中,可借鉴GSSAP对GEO卫星的巡视观测方式,用于对GEO带被服务卫星或空间碎片的巡视观测与外形检查.通过设置轨道高度,使任务卫星处于高于或低于GEO的准同步轨道,整体上处于西漂或东漂状态,在漂移过程中对被服务卫星或空间碎片开展巡视监测.采用燃料最优方式实现GEO轨道调整需要消耗速度增量如式(1)所示,其中,a1与a2分别为轨道调整前后的半长轴.

(1)

图7 漂移巡视示意图Fig.7 The drifting patrol
为进一步加快观测效果与效率,可借鉴GSSAP卫星小幅机动策略,提出机动巡视策略,即在任务卫星东漂或西漂过程中,在观测目标前后调整轨道高度,保证观测每个目标为顺光且距离合适.同时,通过该策略可调整任务时间,调整相对于目标的漂移速度,保证对多目标监测满足时间约束.机动巡视策略要点具体如下:
1)通过调整轨道高度,调整相对于目标的漂移速度,进而调整到达目标附近需要的时间;
2)为了节省推进剂,轨道调整尽量只调整半长轴,形成椭圆轨道;
3)通过选择合适的轨道机动时机,使卫星与目标近距离交会时具有良好的光照角(目标→太阳矢量与目标→卫星矢量的夹角);
4)当目标倾角较大时,以目标升降交点作为卫星与目标近距离交会点,同时考虑到目标升降交点地方时随季节变化,交会点应随之调整.

图8 机动巡视示意图Fig.8 The orbit maneuver patrol
在巡视的基础上,为进一步对目标进行长时间、明确方位的详细观测,需要对目标进行指定位置的近距离接近.在该策略中,需要设定抵近任务卫星时间,通过双脉冲机动实现对目标的近距离抵近伴飞或绕飞,为后续的在轨加注或维护奠定基础.抵近策略计算如下所示,该策略不仅可用于单个目标点抵近机动,也可将上一次目标点作为初始点,实现多个目标点的抵近机动.

图9 抵近机动示意图Fig.9 The orbit maneuvering patrol
(2)
(3)
式中,Φi(i=1,2,…,6)均为3×3矩阵.

(4)

(5)

(6)
(7)
由此,实现了在T时间内任务卫星以双脉冲转移方式接近被服务卫星[10-12].
3 仿真分析
本节针对漂移巡视效能、机动巡视效能与抵近效能、姿态机动能力需求进行仿真,为策略分析与应用提供参考.
针对机动巡视,假设任务卫星位于GEO-50 km,倾角0°,经度53.5°,巡视任务时间不大于7天.设置如下3个被观测目标,具体如下所示:
目标1:倾角5.86°,定点经度54.56°;
目标2:倾角0.01°,定点经度56.82°;
目标3:倾角1.14°,定点经度57.85°.
若采用GEO-50 km漂移,完成3个目标遍历需要7天时间,但不能保证对每个目标顺光观测,且观测距离均不小于50 km.
采用机动巡视,对于上述约4.5°经度差目标,任务卫星需要用约7天完成巡视,总速度增量消耗量约为0.4 m/s,任务星抵近每个目标时的相对运动轨迹如图10所示,机动过程中任务星半长轴与目标相对距离曲线如图11所示.从图12~14中任务星机动巡视观测不同目标的相对距离曲线与光照角曲线可以看出,在与目标最近距离处,任务星均可顺光对目标进行观测.与GEO-50 km漂移巡视相比,机动巡视与目标观测距离更近,且光照角度更小,具有更好的观测效果.
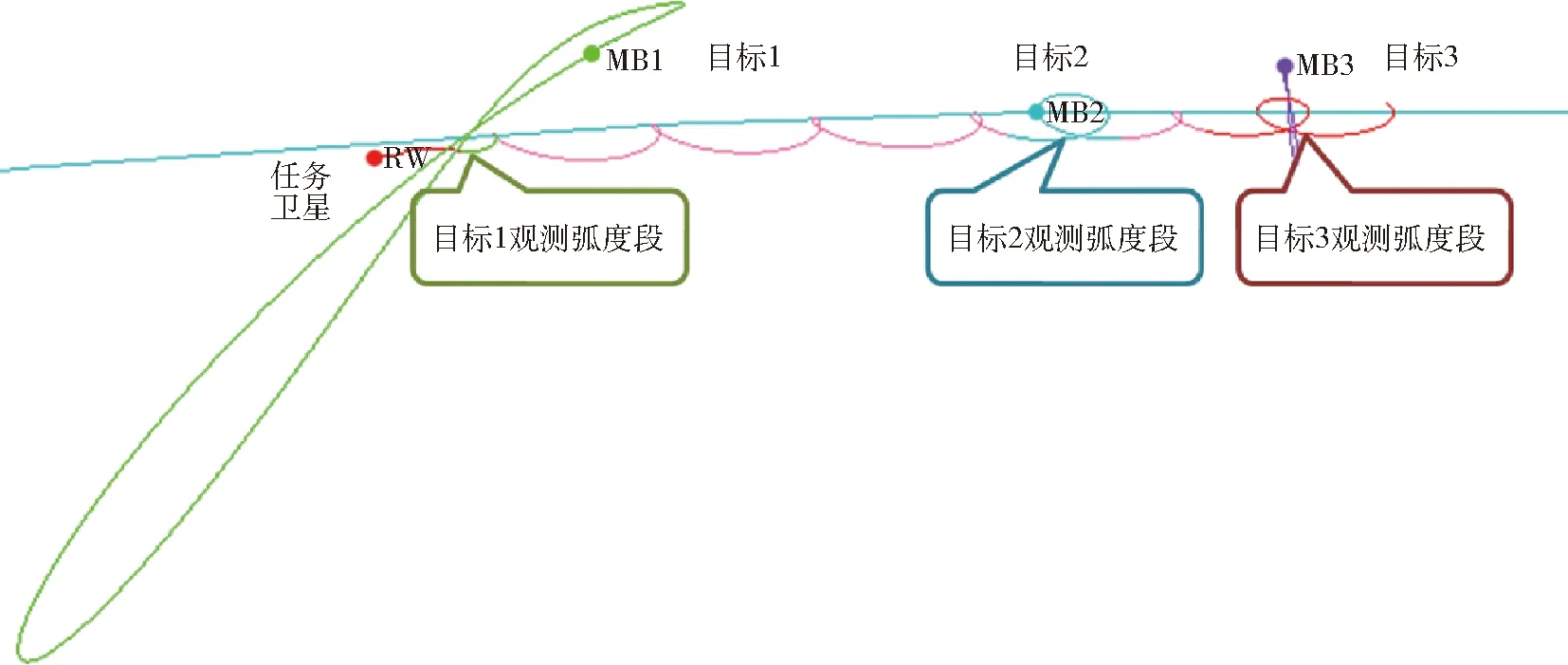
图10 机动巡视场景Fig.10 Orbit maneuvering patrol scene
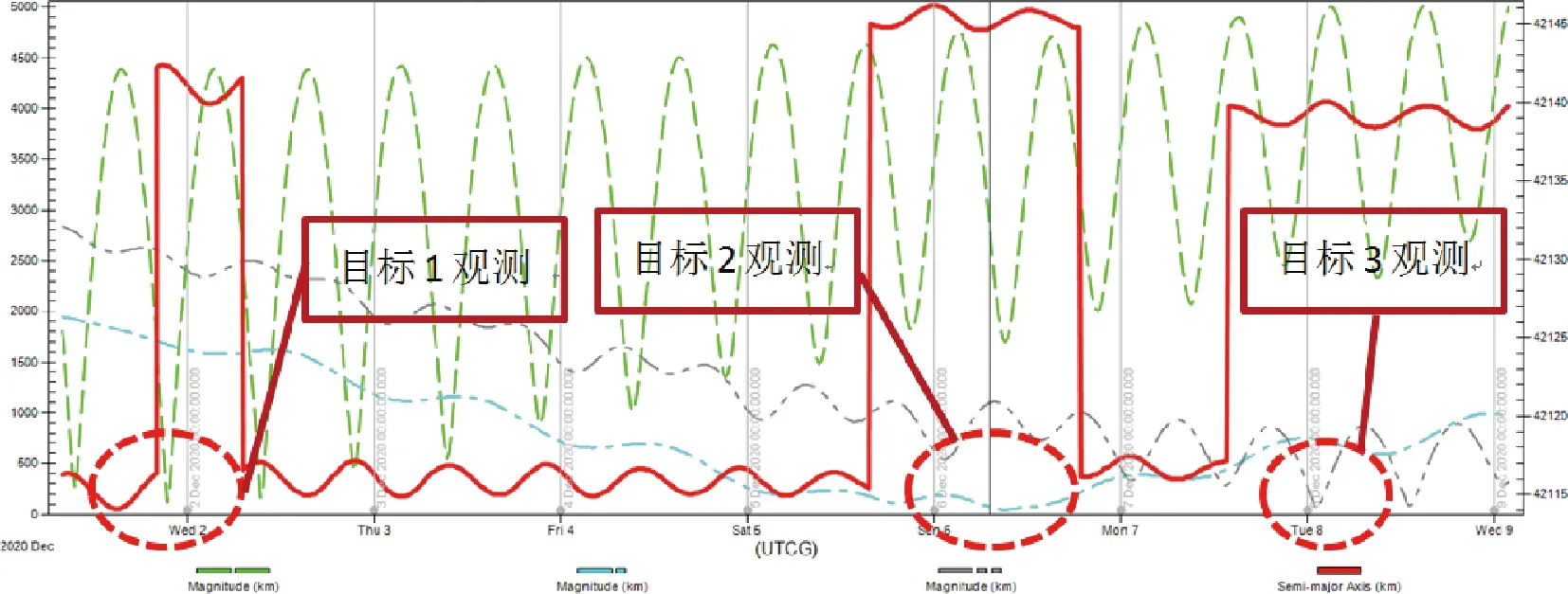
图11 机动巡视仿真卫星半长轴与目标相对距离曲线Fig.11 The semimajor axis and relative distance of orbit maneuvering patrol scene

图12 机动巡视仿真观测目标1相对距离曲线与光照角曲线Fig.12 The relative distance and angle (sun-target-mission satellite) of orbit maneuvering patrol for target 1
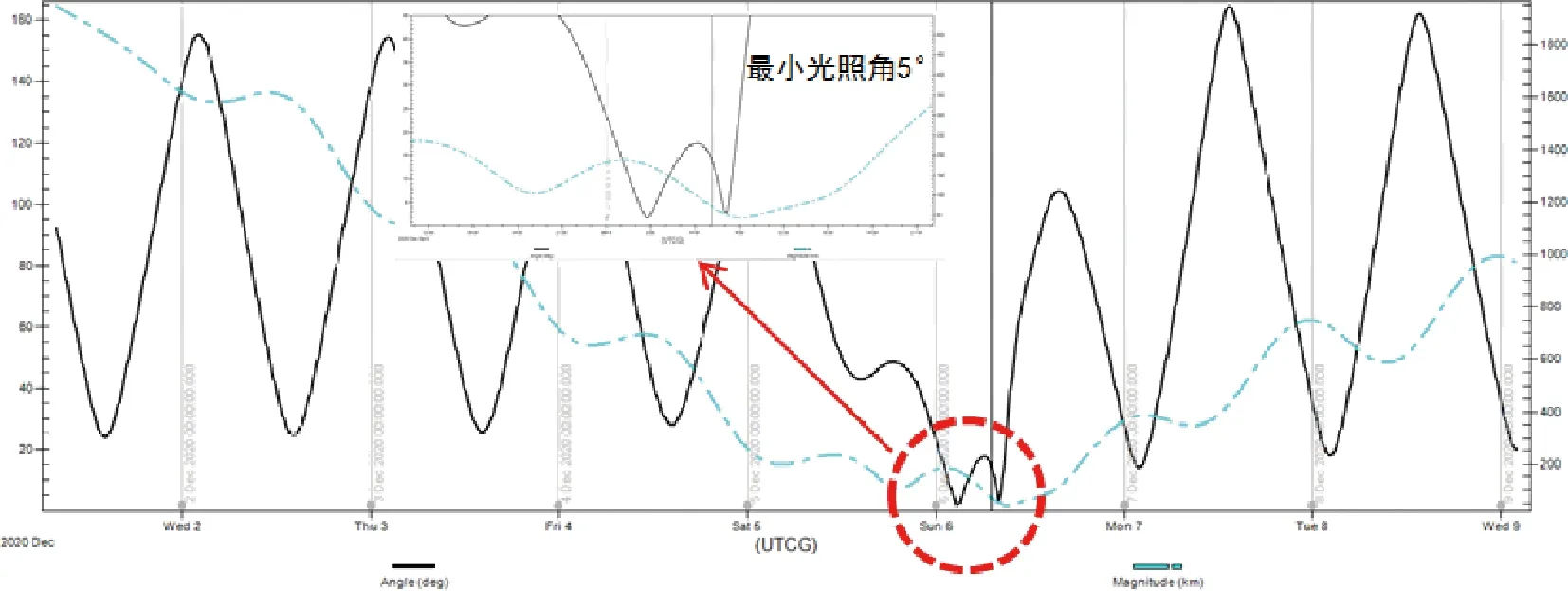
图13 机动巡视仿真观测目标2相对距离曲线与光照角曲线Fig.13 The relative distance and angle (sun-target-mission satellite) of orbit maneuver patrol for target 2

图14 机动巡视仿真观测目标3相对距离曲线与光照角曲线Fig.14 The relative distance and angle (sun-target-mission satellite) of orbit maneuvering patrol for target 3
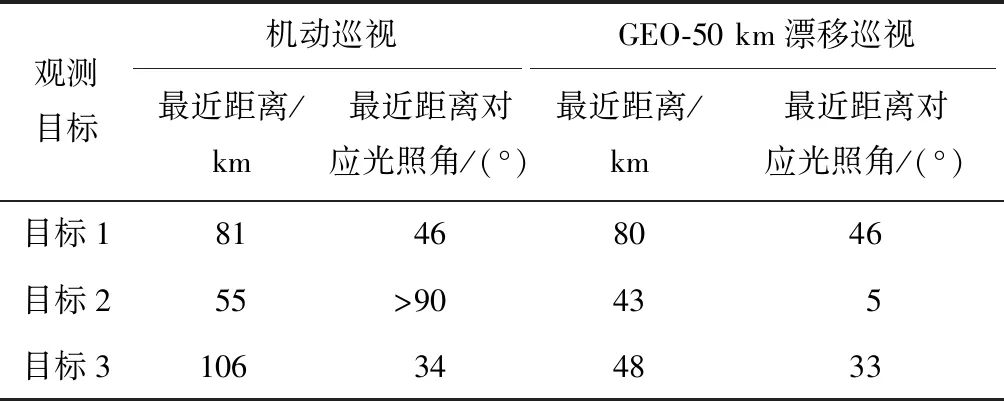
表1 不同巡视方式成像效果对比分析Tab.1 Comparison of imaging effects of different patrol methods
针对抵近效能,通过设置多个抵近点与不同任务时间,使任务卫星快速接近目标伴飞,分析卫星速度增量消耗如图15-16所示.

抵近任务工况100→50 km(1 h)100→50 km(2 h)100→80(1 h)→50 km(1 h)100→80(1 h)→60(0.5 h)→50 km(0.5 h)速度消耗28 m/s14.4 m/s34 m/s38.3 m/s

图15 100→50 km(2 h)抵近场景Fig.15 Proximity scene (100→50 km(2 h))

图16 100→80(1 h)→50 km(1 h)抵近场景Fig.16 Proximity scene (100→80(1 h)→50 km(1 h))
为进一步分析卫星姿态机动能力的需求,针对不同倾角的GEO目标进行分析,给出如下的仿真结果,当目标相对距离越近、倾角越大,则需要卫星的机动能力越高.

表2 不同倾角目标相对角速度分析Tab.2 Analysis of relative angular velocities of targets with different orbital inclinatioins
4 结 论
本文针对美国态势感知卫星GSSAP的总体设计和对空间目标观测机动模式进行分析,并对漂移巡视、机动巡视与抵近等策略开展仿真研究.本文的分析可为我国后续在轨服务、空间碎片监测提供技术基础.
