一种基于长短期记忆神经网络的智慧路灯控制方法
2022-07-30林培杰赖云锋程树英陈志聪吴丽君
郑 凯,林培杰,赖云锋,程树英,陈志聪,吴丽君
(福州大学物理与信息工程学院,福建 福州 350116)
引言
智慧路灯是完成智慧城市项目至关重要的一个因素,当前世界上的路灯数量大约有3.17亿盏。但是,其中智慧路灯的数量不足5%[1, 2]。室外公共照明市场正处于变革时期,老旧的路灯会逐渐被信息化的智慧路灯取代[3]。对于智慧路灯的调光控制,需要从人本视角出发,在优先保证通行车辆和行人照明需求的情况下,尽可能地降低能源消耗[4]。通常关于智慧路灯的研究主要集中在远程控制[5,6],或者依据交通流量调光方向[7]。但是,雨、雾等影响能见度的天气对道路照明效果会产生较大影响,需要在智慧路灯控制中加以考虑[8]。
通过对比7种不同色温的LED,发现虽然高色温的LED具有更高的光效,也更加节能,但在道路能见度降低时高色温LED照明效果会比低色温LED下降更为明显[9,10]。为了解决低能见度下高色温LED照度严重衰减的问题,文献[11]开发了用于智慧城市的路灯智慧控制系统,能够从城市的气象站获得气象参数来及时调控路灯。但是,由于城市气象站数量少、分布广,并不能真实地反映道路的天气状况。为了能够更加精准地掌握道路各部分气象情况,文献[12]研究了一种基于WEB管理的智慧路灯,能够从每盏路灯上的气象传感器实时采集气象数据,并及时针对特定天气情况进行调光。但其只划分了3 200 K与5 000 K两种色温,并且通过对气象数据简单的阈值划分来判断能见度情况,无法进行更精准的调光。
为了能够更好地控制LED路灯,需要获得道路能见度信息。而能见度仪价格昂贵,沿道路大量安装价格成本极高,不切实际。这时就需要使用低成本气象传感器采集的气象数据对能见度进行建模。由于各种气象因子的复杂性,传统物理模型很难对能见度进行准确的建模[13]。而神经网络对各种非线性模型有着很好的拟合能力,因此许多研究利用神经网络,来实现对能见度的建模[14,15]。其次,气象环境变化是一个缓慢渐变的过程,当前时刻与过去时刻的气象因子具有一定相关性。因此,在对能见度进行建模时,若能同时结合短期之内气象因子的相关特征将获得更好的效果。
长短期记忆神经网络(Long Short-term Memory, LSTM) 作为一种经典神经网络[16],近些年在针对时间序列预测的问题上得到了广泛的应用,并且取得了良好的效果[17]。因此,本研究基于LSTM网络,首先结合多维气象时序数据进行特征提取并结合当前时刻气象数据建立能见度预测模型,再根据路面能见度状况结合当前照度值,实现智慧路灯控制,使得智慧路灯进行自适应调光,同时若能见度发生异常可实现告警。
1 本文路灯控制算法介绍
1.1 气象数据集来源以及数据预处理
实验所需的气象数据来自“拉斯皮撒涅波戈德”有限责任公司创办的网站RP5.ru,以及UCI北京城区PM2.5数据集[18]。不同的气象情况有着不同的气象因子特征,温度、湿度、气压、累积风速、露点温度、PM2.5浓度、PM10浓度都会对判断当前能见度情况有一定有影响[13]。
通过皮尔逊系数以及能见度与各种气象因子的散点图(图1)进行相关性分析[19],具体如式(1)。
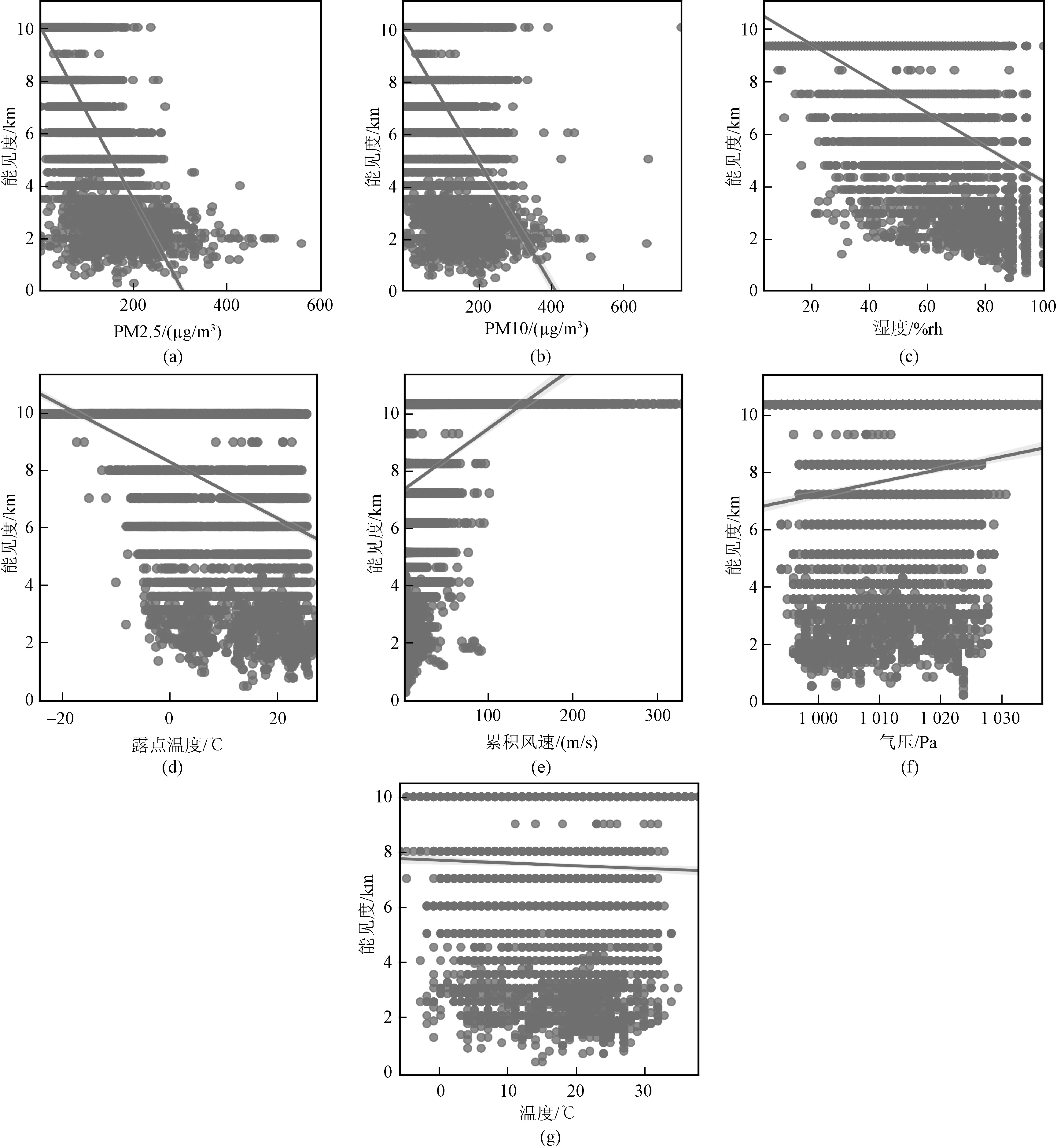
图1 能见度与各气象因子散点图:(a) PM2.5与能见度,(b)PM10与能见度,(c)湿度与能见度,(d)露点温度与能见度,(e)累积风速与能见度,(f)气压与能见度,(g)温度与能见度Fig.1 Scatter diagram of visibility and various meteorological factors: (a)PM2.5 and visibility, (b) PM10 and visibility, (c) humidity and visibility, (d) dew point temperature and visibility, (e) cumulative wind speed and visibility, (f) air pressure and visibility, (g) temperature and visibility

(1)
相关系数的大小在0.8~1.0为极强相关、0.6~0.8为强相关、0.4~0.6为中等相关、0.2~0.4为弱相关、0~0.2为极弱相关或无关,相关系数的正负表示正相关与负相关。皮尔逊相关系数反映的是变量间的线性相关性。根据表1,选择PM2.5、PM10、湿度三个与能见度为中等相关性及以上的气象因子。同时虽然累积风速与能见度为弱相关,但是通过分析散点图可以发现,在累积风速较大时,能见度都在10 km以上,说明低能见度情况的发生需要稳定的大气环境,强风会吹散降低能见度的颗粒物,累积风速与能见度存在非线性相关性,导致皮尔逊系数较低,因此建模时也考虑了累积风速[20]。最终选择PM2.5、PM10、湿度、累积风速来作为神经网络的输入。

表1 气象因子与能见度相关系数Table 1 Correlation coefficients between meteorological factors and visibility
对每个特征进行最大最小归一化,方便后续训练,如式(2):

(2)
1.2 LSTM简介
LSTM是一种特殊结构的循环神经网络,适合对多维特征时间序列数据进行建模。气象因子属于时间序列数据,具有极强的时间相关性,当前的能见度情况通常与当前和过去若干时刻的气象因子存在相关性。因此,本文结合气象因子数据,选用LSTM对能见度进行建模。LSTM结构如图2所示,包含三个“门”状态,遗忘门、更新门、输出门,分别对应图中从左到右三个σ。三个门分别对历史数据、当前输入数据和当前输出数据进行控制。
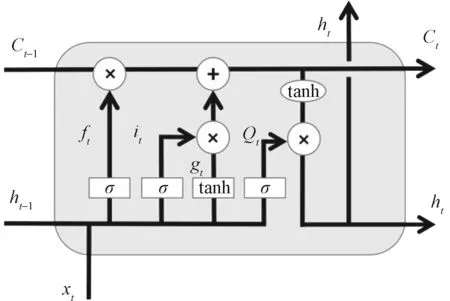
图2 LSTM结构图Fig.2 LSTM structure diagram
xt代表当前时刻输入的特征数据。式(3)、(4)、(5)中的it、ft、ot分别代表更新门、遗忘门、输出门。式(6)中gt是备选记忆细胞,经过激活函数tanh,将数据调整到[-1, 1]区间内。式(7)中Ct是记忆细胞,是由it、ft、gt和上一时刻的Ct-1共同运算得到,Ct只在LSTM神经网络内部传递,并不向外输出。ht即为单个单元的输出,在输出的同时也传递给下一个单元的输入门进行运算[16]。
it=σ(Wiixt+bii+Whiht-1+bhi)
(3)
ft=σ(Wifxt+bif+Whfht-1+bhf)
(4)
ot=σ(Wioxt+bio+Whoht-1+bho)
(5)
gt=tanh(Wigxt+big+Whght-1+bho)
(6)
Ct=ft×Ct-1+it×gt;ht=ot×tanh(Ct)
(7)
1.3 能见度检测算法建模
根据1.1节特征分析中的结论,选择PM2.5、PM10、湿度、累积风速作为模型的输入特征,能见度作为模型的输出。在训练过程中LSTM能够自动提取四种气象因子历史数据中相互之间的关联性,不需要进行复杂的先验物理模型推导。LSTM的模型输入为N×T的矩阵,N是特征维度,本研究中为4。T是时间步长,本研究中取8,即使用过去8个小时的4个气象数据特征来建模当前能见度。LSTM模型要求当前时间步输入一个N维特征数据,然后需要连续输入T个时间步长的数据才进行一次反向传播。利用滑动窗口选取,将连续时间序列数据划分成单个步长为8的小段连续数据。
构建的神经网络模型具有三个隐藏层:第一个隐藏层与第二个隐藏层为LSTM,输入样本特征维度为4,隐藏层神经元个数为32,激活函数选择relu;第三个隐藏层为包含5个神经元的线性全连接层。损失函数选择MSE,使用Adam算法优化LSTM网络。
1.4 智慧路灯控制算法
智慧路灯的控制方式,需要根据当前的照度情况与能见度情况综合判定。在白天发生能见度突然下降的情况,也需要及时开启路灯来引导车辆。PM2.5、PM10、湿度、累积风速与照度传感器连续采集环境信息,并通过能见度建模算法,判断当前环境能见度,并与照度参数结合控制路灯。当照度计采集照度小于15 lx时[21],可判断为夜晚模式,采用夜晚的控制策略控制路灯。反之,执行白天控制策略。智慧路灯的控制流程如图3所示。同时在智慧路灯检测到低能见度时,把该路段所在位置上报云平台,由云平台发布,可以对将要行驶至该路段的车辆提供预警提示。
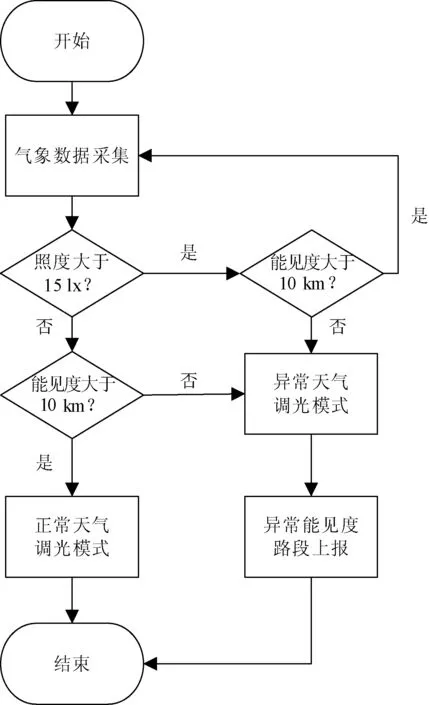
图3 智慧路灯控制流程图Fig.3 Intelligent street lamp control flow chart
2 模型评估及节能效果分析
2.1 能见度建模效果评估
使用正则化均方根误差(NRMSE)、平均绝对误差(MAE)以及决定系数(R2)三个性能指标作为评判模型的依据,如式(8)~式(10)所示:
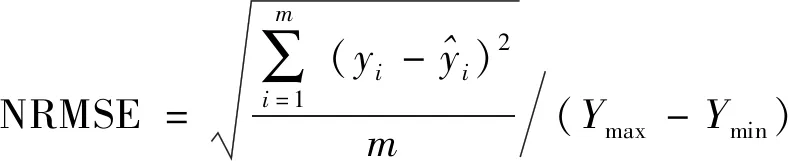
(8)
(9)
(10)

总数据集的时间跨度从2013年3月1日至2014年3月1日,按7∶3的比例划分数据集,前70%的数据作为训练集,后30%数据作为测试集。多层感知机(Multi-layer Perceptron,MLP)[22]作为经典的机器学习算法,已经得到了广泛的应用,在工程上经过实践证明,对各种非线性模型有着较好的拟合能力,例如利用辐照度、温度、太阳天顶角、风速和相对湿度的历史数据进行训练,从而预测光伏发电量[23]。极限梯度提升树(eXtreme Gradient Boosting,XGBoost)[24]是基于梯度提升决策树的一种集成学习模型,通过不断迭代拟合残差,提升弱分类器性能,可生成准确率较高的模型,近三年来XGBoost被广泛应用于短期降水预测、交通流量预测等回归建模问题[24, 25]。因此选用这两种算法与LSTM进行建模效果对比。MLP的隐含层为6层,每层包含16个神经元。XGBoost参数为500棵决策树,每棵树最大深度为5。实验模型运行10次,取测试集结果准确率的平均值进行对比,如表2所示。可以看出,在测试集上LSTM的NRMSE 为0.13194,MAE为0.69785 km,均小于XGBoost与MLP的结果。其次,LSTM获得的R2为0.85725,相较于其他两种算法有着更高的预测精度。这主要由于XGBoost与MLP算法不能很好地学习时间序列中前后特征的依赖关系,而LSTM通过逐步输入数据,让信息在神经元中依次传递,能够较好地捕捉过去一段时间内湿度、PM2.5、PM10和累积风速的变化特征,并结合当前气象数据来预测能见度,取得更好的效果。

表2 三种算法的平均性能指标对比Table 2 Average performance indicators of the three algorithms
2.2 智慧路灯节能效果评估
从测试集中随机选取一段连续的时间作为展示,来评估路灯的照明效果与节能效果。在本研究中,为方便比较智慧路灯相对于传统路灯的性能提升,白天与夜晚判别依据采用与传统路灯一样的时间判别法。
假设所研究的LED路灯单盏功率为200 W,在天气正常、视野良好、能见度较高时,根据DIALux路灯照明仿真软件[26],只需要维持在70%的照度就可以达到所需的15 lx的路面照明需求。根据文献[9]、[10]和文献[27],在相同能见度下,当路灯色温不断降低时,光线透雾率逐渐升高,透雾率和色温高低呈负相关性。因此,我们拟定如表3和表4所示的夜间和白天的控制策略,其中当能见度下降时,路灯色温逐渐降低,照度逐渐提升。实际情况下可根据具体路灯规格,调节不同控制等级下照度与色温的具体数值。

表3 夜间路灯控制策略Table 3 Night street lamp control strategy

表4 白天路灯控制策略Table 4 Daytime street lamp control strategy
分别画出路面能见度、定时路灯与智慧路灯控制曲线,如图4所示。定时路灯的控制策略为当前实际应用中最常见的路灯控制方式,根据当前时间选择路灯的开关状态。对于定时路灯,由于不能进行智慧调光,为了保证低能见度下道路照明安全性,路灯照度和色温需要依据异常天气情况的照明标准设计,在8:00—18:00之间判断为白天,路灯关闭;在18:00至次日8:00之间判断为夜晚,路灯开启。路灯照度选择100%,色温选择4 500 K。从图4中可以看出,对于传统定时路灯,由于不能进行自适应调光,为了满足异常天气、低能见度时的道路照明需求,传统路灯在工作时间内不论天气情况,需要一直维持在100%照度的高亮度工作模式,造成性能过剩。与此同时,在非定时工作时间内如果出现了恶劣天气,能见度下降,路灯也不能及时点亮,影响了道路交通安全。而使用本控制方法的智慧路灯在天气正常、视野良好、能见度较高时,智慧路灯只需以70%的功率运行,就可满足路面达到15 lx的照明需求[21]。一旦出现异常天气能见度降低时,智慧路灯能够自动做出响应,调高亮度、降低色温,增强路灯光线的穿透能力,使得路面照度依旧满足需求。一旦识别到低能见度天气,在白天传统路灯无法工作的时段,智慧路灯也能运行。本文的控制方法在节约能源的同时,还保障了路面交通安全。

图4 路灯照明效果对比Fig.4 Comparison of street lamp effects
根据中间视觉模型,不同色温的路灯具有不同的照度效果,在计算时需要引入照度修正系数[28]。计算式如式(11),式中P为路灯最大功率,n为照明时长,α为调光等级,β为照度修正系数,见表5[29]。
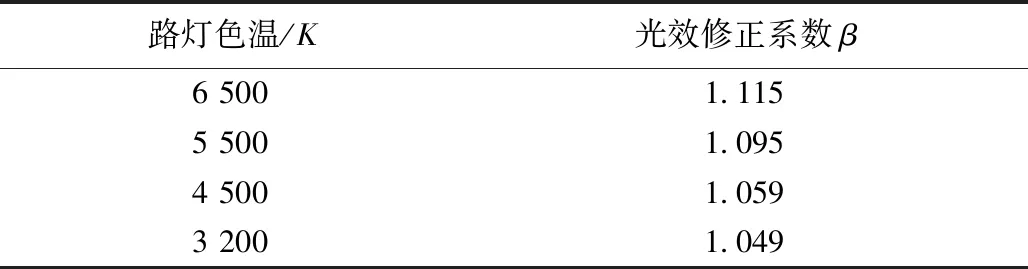
表5 路灯照度修正系数Table 5 Street lamp illuminance correction factor

(11)
统计图4展示时间段内的定时路灯照明时间与智慧路灯照明时间,以路灯亮度百分比作为功率节约系数,可算得一盏智慧路灯在2013年12月14日至12月24日内的功耗Po为21.36 kW;在该时间段内,一盏定时控制路灯能耗Po为26.44 kW,相比之下一盏智慧路灯10天内可节能5.08 kW,能耗降低:
(26.44-21.36)/26.44×100%=19%
由于在低能见度情况下使用了更低色温的照明模式,光线穿透力更强,路面交通安全性也得到了提升。
3 结语
为了电力能源节约以及满足突发的低能见度情况下的道路照明需求,本文提出了一种可以根据当前道路能见度状况自动调节照度与色温的智慧路灯控制方法,在满足道路照明需求的情况下,尽可能降低能耗,同时兼顾安全性与节能性。该路灯无需安装高成本的能见度仪,而是采用了低成本气象传感器采集气象因子数据。利用气象因子数据,使用长短期记忆神经网络构建道路能见度预测模型。本文所采用LSTM模型获得能见度预测值与真实值之间的NRMSE为0.13194、MAE为0.69785 km、R2为0.85725,比起MLP与XGBoost所搭建的模型预测误差更小,同时预测精度更高。进而,根据透雾率和路灯色温高低呈负相关性,结合所获得的能见度等级与环境光照度,本方法进行自适应调光实现智慧路灯控制。通过设置仿真实验,相对于传统定时控制路灯,本方法所研究的智慧路灯在仿真时段内节约了19%的功率消耗。
