城市道路测绘中车载激光雷达扫描技术应用研究
2022-07-28秦嘉泰李儒风黄彦刚段军魁
秦嘉泰 许 攀 李儒风 黄彦刚 段军魁
(1.河北科技大学建筑工程学院,石家庄 050018;2.广州南方测绘科技股份有限公司石家庄分公司,石家庄 050018;3.天津仁恒和美房地产开发有限公司,天津市 300090)
0 引言
道路是城市环境中最具活力的区域,也是城市的血管,对城市道路定期的监测有利于提高路网作用,为居民出入提供更好的安全通行环境。将复杂的城市路网进行科学、全面、低成本地管理,逐渐成为了许多学者研究城市精细化管理的重要课题[1-4]。
车载激光雷达是一种主动遥感设备,其优势在于突破了传统的单点测量法,具备穿透地表覆盖的森林植被的能力,更好地获取地形信息[5-8]。将激光雷达搭载在机动车上,通过对道路及其两侧的扫描来记录目标的位置和反射强度等信息,可以快速、高密度、低成本、高精度、高自动化地完成道路及其沿线设施的三维信息采集,大大减少了外业采集的工作量,工作便捷,信息采集高效,精细化程度高[9-10]。本文针对城市道路的特征,以实际工程项目作为背景,利用车载激光雷达技术对城市道路进行测绘,对测绘处理过程和测绘精度进行了详细地描述、统计和分析,对未来城市道路测绘工作具有较好的借鉴意义。
1 工程概况
本文以佛山市顺德区一条路线全长约8.14km的城市道路工程为例,该道路总体呈东西走向,西侧起点位于与碧桂路相交的路口(桩号K0+450),向东沿线与多条既有道路相交、终点与黄揽干线相接(桩号K8+100)。其中,桩号(K2+150~K2+380)和桩号(K3+140~K4+620)为既有桥梁段,桥梁段不在本次路面提升改造范围内。德胜东路道路规划红线宽度为60m(顺番公路段90m),设计速度为60km/h,双向6 车道,道路等级为城市主干道。
本文测区整体高差不大,主干道上树木遮挡较少,但是大型货车较多,不仅行驶较频繁,主干道应急车道上也有部分地段有大型货车停靠,对测量有一定影响。辅道上树木茂密,基本遮挡住辅道,并且辅道内有小型车辆停放。因此作业范围为测区内的主道部分,不包括测区内的辅道、跨河桥梁及高架桥部分。
2 外业数据采集
2.1 前期准备
在外业数据采集前,利用准备好的地图数据,进行实地踏勘,确认采集范围内的道路交通状况,采集线路之间的关联性,并在地图上做好标记,以便在外业线路规划中可以进行合理安排。提前规划基站位置、行驶线路,尽量保证沿卫星信号良好的路段行驶。在踏勘过程中同时寻找适合架设基站的位置及控制点。此外,在测区范围内至少提供4~5 个点的两套坐标信息(WGS84+椭球高/当地坐标系),这两套坐标信息用于计算参数,把WGS84 坐标点云转到当地坐标系下,这也防止了坐标采集出错的情况。
2.2 外业采集
利用车载激光雷达扫描技术进行外业采集,用于获取横纵断面图、1:500 地形图、道路特征线、逐桩坐标偏离表及路基设计偏离表等信息。外业采集过程主要分为6点。
2.2.1 标靶点的布设与采集
本文采集环境为城市道路,考虑到安全因素,无法在车行道中间的虚线角点进行测量,而道路边缘线无标线角点,所以需要布设标靶。标靶平面坐标采用GPS-RTK 进行测量,高程采用四等水准的观测方法进行测量,道路两侧每隔200 左右布设一个点。十字路口左右通视的标靶点可布设在路中间,保证道路两侧都可以测量。在路两侧树木较密、桥隧底下等会造成卫星信号失锁的地方适当加密标靶点。
2.2.2 基站架设
根据基站布设的规划,每个基站需架设在已知坐标的点上,同时,根据测区总长决定架设基站的个数,一个基站控制范围为25km。基站采用静态采集模式,为获取更高的采集精度,基站架设在控制点上(WGS84经纬度及高程信息),采样间隔设为0.5s。
2.2.3 数据采集
数据采集主要是由征图移动测量系统操控软件ZTControler 进行,主要是在移动的载体上安装多种传感器,在载体移动时,传感器自动采集载体的运动位置以及周围环境和物体的形状、色彩及影像等各种三维连续地理空间。
2.2.4 数据解算
对点云轨迹进行解算,主要分为以下几个步骤:(1)通过轨迹解算软件Inertial Explorer 解算出轨迹数据(*pos);(2)通过征图数据融合软件ZTPreProcess融合轨迹数据和原始激光数据(*.rxp),得到具有位置信息的点云数据(*.las);(3)通过征图数据融合软件ZTPreProcess进行坐标转换,得到当地坐标系下点云数据。
2.2.5 轨迹纠偏
对于轨迹纠偏处理,该项目道路侧设标靶点44个,作为点云数据的轨迹纠偏点,其他由甲方提供的检查点用作精度检查,主要处理步骤分为:(1)通过征图软件对轨迹进行纠偏处理,选取标靶点圆心的点云坐标和实测坐标作为一组同名点,多组同名点构成最终轨迹纠正文件,利用控制点对轨迹进行纠正优化,实现纠偏的目的。(2)重新融合纠正后的轨迹数据(*.pos)和原始激光数据(*.rxp),得到高精度点云数据。标靶点和实测点高度重合,轨迹纠偏处理精度较高。
2.2.6 数据检查
数据检查主要包含了6部分内容,具体如下:(1)覆盖完整度检查,对工程项目进行分块,逐个检查,保证数据完整(红色为范围线,方框为数据框),如图1(a)所示;(2)点云重叠度检查,沿道路每隔100m,做一个横向切面,检查点云的平面和高程的重叠度,如图1(b)所示;(3)点云突变检查,检查轨迹数据,对于高程异常的地方,将对应的点云做出纵切面,确认是否为突变点,如图1(c)所示;(4)点云高程检查,在有标靶点的地方横切剖面,根据标靶点高程信息对点云进行高程检查,如图1(d)所示;(5)点云精度检查,利用已有的检查点,进行初步精度检查,符合要求后即可转交内业进行内业工作,由统计结果看出,标靶点在平面中和高程中的误差较小,精度较高。
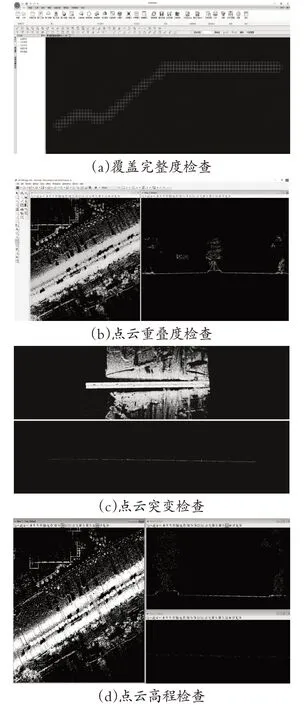
图1 数据检查示意图
根据以上的点云数据检查结果,说明点云数据的精度较高,针对少量平面、高程精度较差的点云需加入所有标靶点后进行再次校正,这些校正后的点云数据可用于路面特征线提取、点云分类过滤及抽稀工作。
3 内业数据处理
在完成外业采集工作后,需要开展内业数据处理工作,主要包括点云分类、特征线绘制以及地形图绘制。
3.1 点云分类
对于最终纠偏后的点云数据,由于其存在大量的无用数据(道路两旁外点云数据、植被点云数据、辅道点云数据、顶部架桥点云数据等)。本文使用Terrasolid软件对其进行相应的过滤,最终得到道路路面点云数据。目的在于减少点云数据量,排除干扰点云数据,便于后期的道路横断面作业处理工作。对点云自动分类结果需要进行交互检查,主要准确判断出地面点和非地面点两类。
3.2 特征线绘制
基于最终纠偏后的点云数据,在SouthLidar中,精确提取道路特征矢量线数据信息,用于后续设计选取道路中线。
3.3 地形图绘制
通过分层剪裁和三维窗口的辅助,绘制出路灯、凹槽、路牌等地面物体,使地物绘制更加地直观准确。通过对不同路段三维图的绘制,最后能够绘制出来精准地形图和断面图。
4 结束语
本文以佛山市城市道路工程为例,通过车载激光雷达扫描技术对道路进行了外业数据采集和内业数据处理,可以得出以下结论:
(1)通过征图软件对轨迹进行纠偏处理,可以使标靶点和实测点高度重合,数据精度能够较好地满足道路测绘需求。
(2)在外业数据采集中引入全景影像技术,这可以为规划部门在规划的过程中进行更好地复核。
(3)在内业数据处理中通过过滤后获取道路路面点云数据,排除了干扰点云数据,有利于提高地形图绘制效率。
(4)车载激光雷达技术在外业和内业工作中具有智能、快速、便捷的优势,有利于提高道路监测的效率及自动化的水平,具有较高的应用价值。
