一种基于3D SVPWM调制的三相四桥臂逆变器控制方法
2022-07-28张波
张 波
(西安特锐德领充新能源科技有限公司,西安 710000)
0 引 言
三相逆变器带不平衡负载时各相输出电压幅值大小有很大差异,且畸变严重[1]。传统的三相三桥臂拓扑由于没有中线,只能带三相平衡负载,无法带单相负载。
传统处理方法是采用分裂电容拓扑,在母线中点引出中线,文献[2]提到此方式可以解耦三相电压控制,但带来的问题是母线利用率降低,母线电容容量增大为原来的2倍,成本增加,更大的问题是在输出限流期间,电流回灌正、负母线,容易造成母线过压故障,导致可靠性不高。
三相四桥臂很好解决了这个问题,与传统分三桥臂拓扑相比,其母线利用率不变,母线电容不变,限流期间母线上能量有进有出,无母线过压问题,而且可以带单相负载。但由于引入了第四桥臂,传统的两电平SVPWM难以满足要求,用SPWM也无法解耦四桥臂模型,有文献[3-4]提出将第四桥臂独立控制,但因为与其他三桥臂不是一个整体,控制变得不解耦,控制效果变差。本文提出了一种将四桥臂作为一个整体的逆变器控制方法,利用正负零序分量解耦控制,此方法对三相负载的不平衡度有很强的抑制作用,同时简化了3DSVPWM发波,在工程容易实现。
1 三相四桥臂逆变器模型
三相四桥臂逆变拓扑结构如图1所示。图中Vn,Va,Vb,Vc分别为四相发波电位,in,ia,ib,ic分别为四相电感电流,VoA,VoB,VoC分别为三相输出对N点的电压,ioA,ioB,ioC为三相负载电流,icA,icB,icC为三相输出电容电流,N点为负载中点,Udc为母线电压。
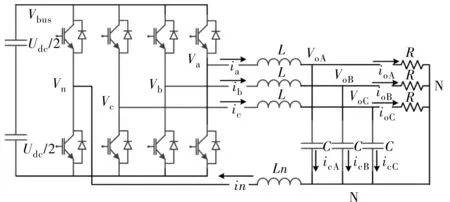
图1 三相四桥臂逆变拓扑
假定ABC三相电流方向流出桥臂为正,N相电流流入桥臂为正,电容电流流入N点为正,在ABC坐标系下得到:

(1)
式中,r为电感内阻,L为ABC三相电感,Ln为N相电感。
四桥臂拓扑中有16种开关状态,对应16种开关矢量,各个桥臂的开关状态用开关符号Sx表示,如下:
(2)
因此臂间电压Vxn=(Sx-Sn)Udc,x=a,b,c
根据状态空间平均理论,状态开关Sx等效为占空比D,因此通过控制四个桥臂的开关管占空比,就可以控制臂间电压,根据式(1)可知也就可以独立的控制三相输出电压VoA,VoB,VoC。
但是有一个问题是VNn无法直接计算出来,也就是在abc坐标系下,会有一个VNn估算不准确,影响三相的解耦,进而影响控制精确度。
利用Clark变换,可消除VNn的影响,将abc坐标系转换到αβγ坐标系,由式(1)得:
(3)
假设Ln=L,因为γ轴与αβ轴垂直,所以是解耦的,因此利用Park变换将αβ坐标系转换到dq坐标系,在加上原有的γ轴,就形成了新的dqγ模型如式(4),此模型中的各变量都是直流量,且在三维空间上相互正交,从而使得臂间电压Vxn的控制更为精确。
(4)
式中,Vd,Vq,Vγ是臂间电压对应的旋转矢量,id,iq,iγ是三相电流的旋转矢量,Vod,Voq,Voγ是三相输出电压的旋转矢量。根据式(4)得到系统模型如图2所示。由图2分析可知,三相四桥臂经过旋转变换后,模型完全解耦,dqγ三轴可独立控制。

图2 三相四桥臂逆变dqγ坐标系模型
2 3DSVPWM简化调制方法
在模型确定后,如何发出臂间电压成为关键,3DSVPWM发波方式的提出可以解决这个关键问题,文献[5]提出了一种3DSVPWM的简化方法,但没有具体说明推导过程。
将四桥臂逆变器的16个开关状态与三相臂间电压Vxn对应起来得到表1。

表1 四桥臂开关状态表
再将表1的16个状态由abc坐标系转换至αβγ坐标系,可以得到αβγ坐标系下的开关矢量。根据各矢量在αβγ坐标系下的投影,在三维坐标系中描绘出图3。
由图3可见,将三维空间分成6个三棱柱,每个三棱柱里有6个非零矢量,可以将三棱柱分成4个四面体,也就是整个三维空间有24个空间四面体,需要对每个四面体的组成矢量逐个分析。

图3 三维空间矢量图
有文献根据abc坐标系标量的符号去判断矢量所在的四面体,一是没有提及理论依据,二是在计算空间矢量时标量坐标系与矢量坐标系来回切换,计算量大,浪费芯片资源,在工程不易实现。
如果将其投影到αβ平面上,则与普通的二维空间矢量图一致,只是多了第四桥臂的开关状态,如图4所示。

图4 二维空间投影图
因此提出一种简化的3DSVPWM计算方法,此方式全部在αβγ坐标系下计算得出所有矢量以及分区,下面描述计算依据与实现步骤。
(1)步骤1
按照三维矢量的平面投影分成6个主扇区,对应6个三棱柱,将6个三棱柱顺时针全部旋转到第一扇区的三棱柱,可以发现,第135扇区的三棱柱为同一构造,第246扇区的三棱柱为同一构造。以第1、2三棱柱为例如图5所示,每个三棱柱根据面ΔAOB、ΔBOC、ΔCOD、ΔDOC又可以分为4个子扇区。以下计算均根据图5展开。
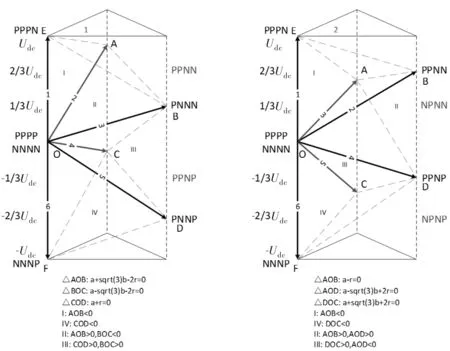
图5 第1、2主扇区三棱柱矢量图
(2)步骤2
将三棱柱的αβ平面投影(图4),与传统的二维SVPWM一致,根据六边形的对角线方程,先判断6个主扇区,流程图如图6所示。
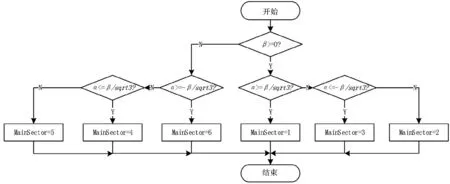
图6 主扇区判断流程图
(3)步骤3
根据图5,第1主扇区三棱柱被ΔAOB、ΔBOC、ΔCOD三个面分成4个四面体,参考αβγ三维坐标系的平面方程如下。
ΔAOB:α-γ=0
本步骤流程图如图7所示。
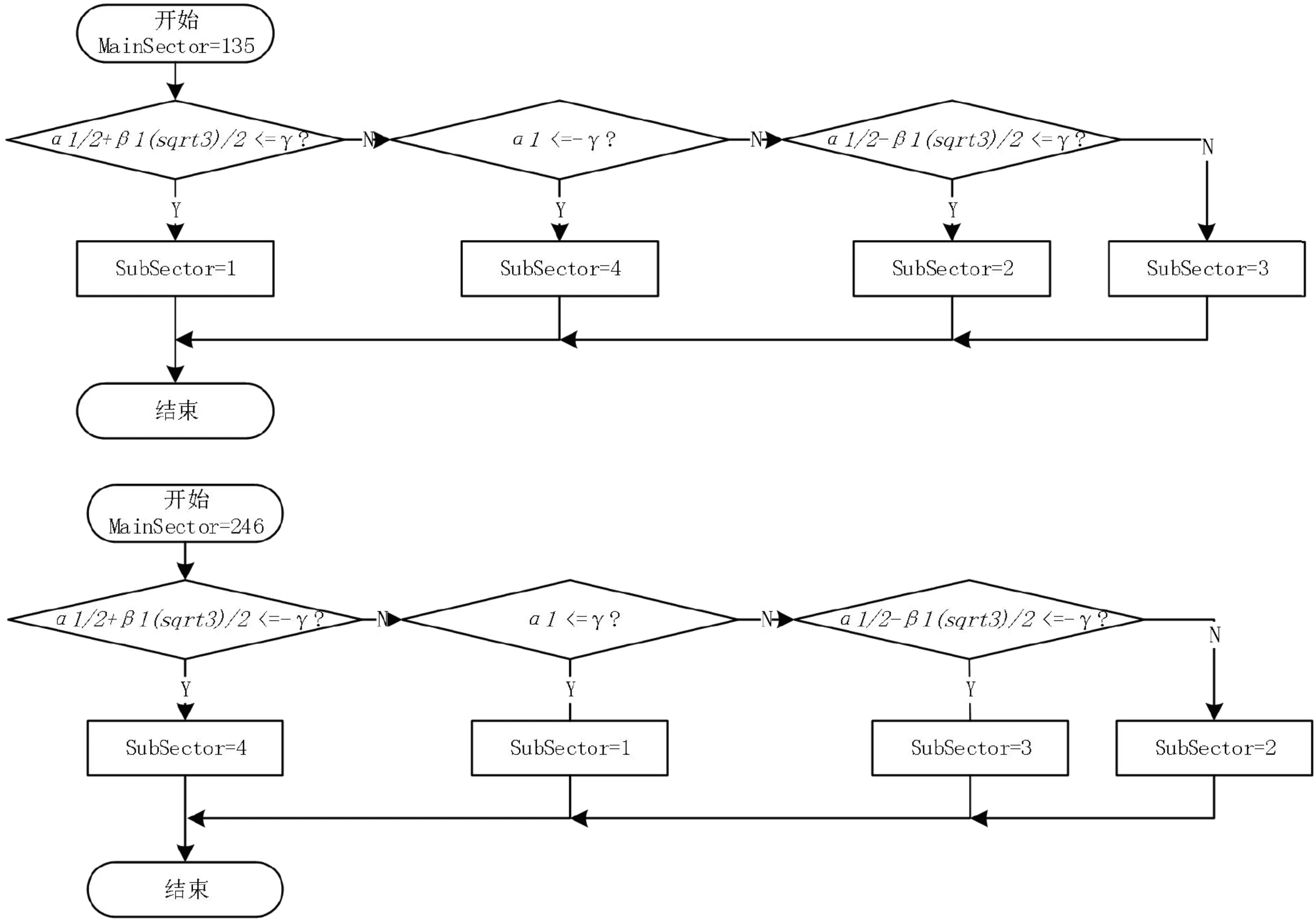
图7 子扇区判断流程图
(4)步骤4

(5)

(5)步骤5
如图5,在三维坐标系下,每个矢量由子扇区中的三个非零矢量组成,分别在不同的四面体子扇区按照式(6)计算各自矢量作用的时间t1,t2,t3。
(6)
式中,Urefα,Urefα,Urefγ是发波矢量的αβγ轴分量,U1α,U1β,U1γ是子扇区1号矢量的αβγ轴分量,U2α,U2β,U2γ是子扇区2号矢量的αβγ轴分量,U3α,U3β,U3γ是子扇区3号矢量的αβγ轴分量,t1,t2,t3是子扇区1、2、3号矢量一个周期Ts内对应的作用时间。
(6)步骤6

(7)
根据图5将每个扇区都按照以上方法计算一遍,得到所有扇区的矢量作用时间,如表2所示。
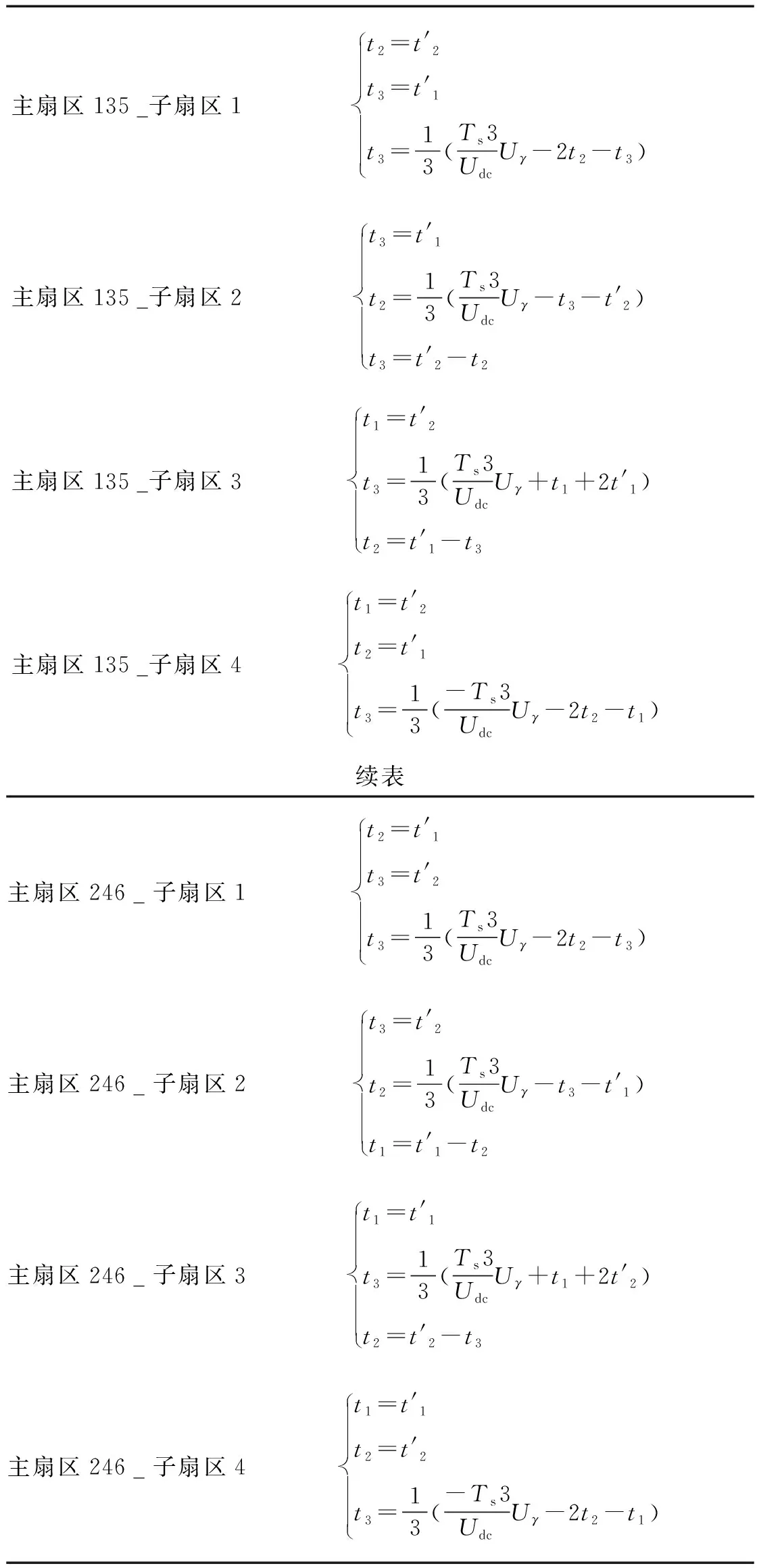
表2 αβγ坐标系下的四桥臂开关矢量时间表
(7)步骤7
根据各个扇区矢量的作用时间,按照谐波最小原则,构造发波时序,以第1主扇区第1子扇区为例,如图8所示。

图8 3DSVPWM发波时序
以上方法将6个三棱柱旋转到第1个三棱柱,将三棱柱构造归一到两种,原来分别要计算24个四面体,现在只需要计算8个,并且利用了传统二维SVPWM的结论,只需要简单的加减运算就可以计算出3DSVPWM的各个矢量时间,在判断子扇区时,只利用了αβγ分量,不需要反变换到abc坐标系,节省了计算开销。
3 四桥臂逆变器不平衡负载控制方法
根据图1拓扑,因为第四桥臂的存在,控制负载N线的电流成为了可能,所以较传统的三桥臂拓扑,最大的优势在于可以带缺相负载,如果控制不解耦,在带单相或者两相负载时,空载的相电压就会受到影响。因此在带缺相负载时,三相电压的不平衡度控制是关键。
根据对称分量法,三相不平衡的量都可以分成三组各自对称的量,分别是正序、负序、零序。基于此,如果将这3种分量都可以做到无差控制,那么三相不平衡问题也就可以解决。
传统的矢量控制无法控制零序分量,所以无法实现缺相运行。四桥臂拓扑,3DSVPWM发波中引入了γ轴,使得控制零序分量成为可能。
由第1节的图2的dqγ模型分析可知,将abc坐标系变换到旋转坐标系dqγ上是解耦的。γ轴体现了零序分量的特征,dq轴上含有正负序分量的特征。
根据dq变换理论可知,如图9,矢量E逆时针旋转得到正序坐标系矢量eP,其中的负序分量在正序dq坐标系下表现为2倍基波频率的交流量,矢量E顺时针旋转得到负序坐标系矢量eN,其中的正序分量在负序dq坐标系下表现为2倍基波频率的交流量。

图9 正负序分量旋转矢量
利用双同步坐标分离法先分离正负dq分量,根据图2的dqγ模型,对正负零序分量分别控制就可以实现各种不平衡载的控制,图10给出了该方案的控制框图。
图10中,ωp是正坐标系角频率,ωn是逆坐标系角频率,与正坐标系符号相反,该控制框图包括三部分。
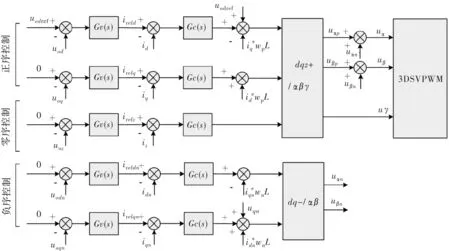
图10 逆变器正负零序分量控制框图
第一部分是正序控制,在正序坐标系下,以d轴电压定向,逆变器控制目标只有正序的d轴分量,q轴给定为0,经过正序的电压电流控制,得出正序发波量经过dqγ+/αβγ(正序帕克变换)得到uαp,uβp。
第二部分是负序控制,在负序坐标系下,dq轴目标均为0,经过负序的电压电流控制,得出负序发波量经过dq-/αβ(负序帕克变换),得到uαn,uβn。
第三部分是零序控制,γ轴与dq平面垂直,没有耦合项,零序电压目标为0,经过零序的电压电流控制后,得出零序发波量uγ。
在静止坐标系中可以将uαp,uαn直接相加得到uα,将uβp,uβn直接相加得到uβ,再经过第三节所述的3DSVPWM发波,就可以解决三相逆变器带不平衡负载问题,即使在极限情况缺相负载下,也可以保证三相电压平衡。
4 仿真分析及实验验证
文献[1]指出三相电压不平衡度是用电压负序、零序基波分量与正序基波分量的方均根值百分比表示。使用Matlab软件仿真验证上述方法的正确性。
三相四桥臂逆变器仿真系统参数为额定功率10 kW,额定电压220 V,滤波电感140 μH,电感等效内阻0.1 Ω,输出电容3.3 μF。不平衡负载验证极端情况,分别针对线性载与非线性载,进行三相满载、缺一相满载、缺两相满载进行仿真验证。仿真结果如下。
(1)线性负载
线性负载时仿真结果如图11~图13所示。

图12 AB相带载仿真波形

图13 A相带载仿真波形
线性负载不平衡度分析如表3所示。

表3 线性负载不平度计算
(2)非线性负载
非线性负载仿真结果如图14~图16所示。

图14 ABC相带载仿真波形


图15 AB相带载仿真波形

图16 A相带载仿真波形
非线性负载不平衡度分析见表4。

表4 非线性负载不平度计算
由表4~表5分析可知,在不平衡负载的极限情况缺相负载下,线性载不平衡度最大0.802%,非线性载不平衡度最大0.434% ,均远小于业界3%不平衡度指标。其原因在于四桥臂拓扑结合3DSVPWM,再对三相电压的正负零序分量分别解耦控制,可以有效的抑制三相不平衡负载,因为任何三相电压都可以分解为正负零序分量,此方式把正负零序分量经旋转变换都转换成直流量控制,因此仅用PI调节就可达到无差效果,简化了控制,提高了控制精度。
由图11~图16可见,在0.6 s瞬投满载时,线性载无跌落,非线性载在3个周期内就可以恢复,因为在三相电压在动态瞬间也可以分解成正负零序分量,此方式对正负零序分量解耦控制,因此对负载动态也有很好控制效果。
为了进一步验证该方法,按照仿真参数搭建10 kW三相逆变器试验系统,图17~图19为带10 kW线性负载时,系统带三相载、两相载、单相载的电压电流波形,图20~图22为带非线性负载时,系统带三相载、两相载、单相载的电压电流波形。

图17 ABC相带线性载实际波形

图18 AB相带线性载实际波形
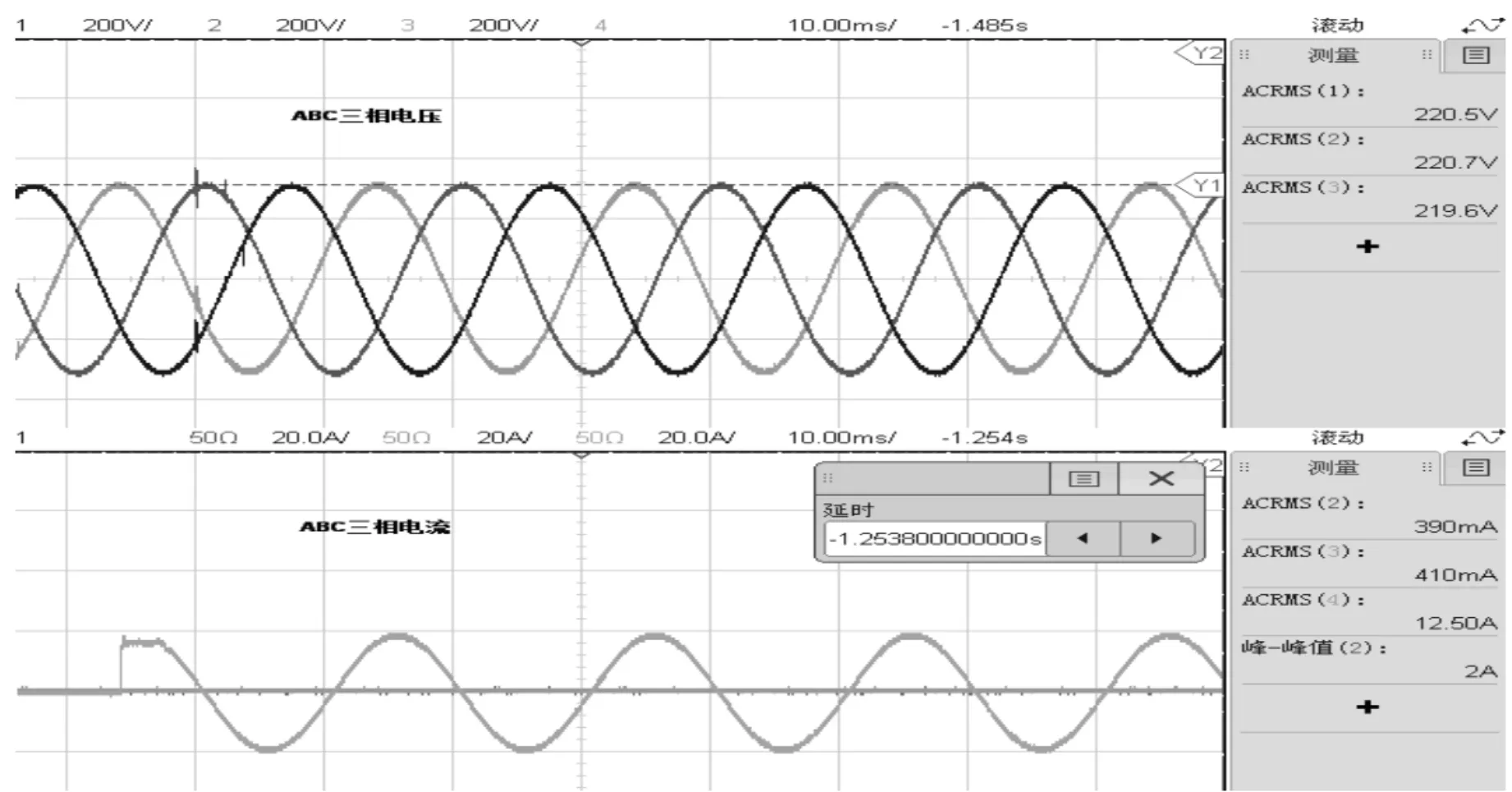
图19 A相带线性载实际波形
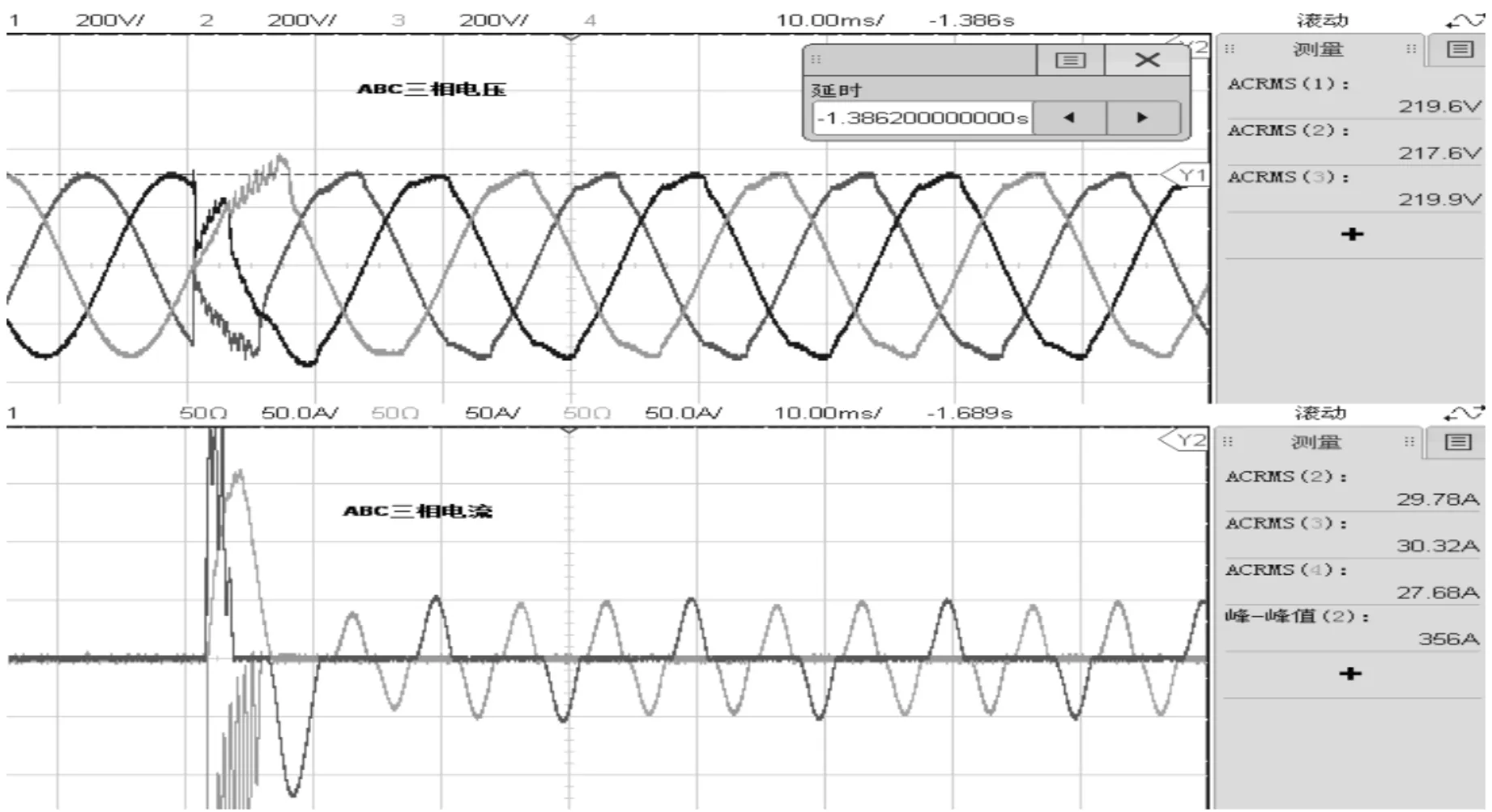
图20 ABC相带非线性载实际波形

图21 AB相带非线性载实际波形

图22 A相带非线性载实际波形
实际波形(图17~图22),与仿真波形(图11~图16)一致,实验结果证明这种基于3DSVPWM的三相四桥臂逆变器控制方法,无论是线性还是非线性负载,对于不平衡负载的各种工况均有很好调节作用与控制效果,验证了该方法的正确性。
5 结 语
本文针对三相四桥臂逆变器,首先建立了dqγ坐标系下的数学模型,然后利用坐标旋转将原来24个四面体归一成8个四面体,简化了3DSVPWM实现方法,最后根据三相对称理论,对三相逆变器分别进行正序、负序、零序解耦控制。通过仿真与实验,证明了此种方法不论在线性或非线性载下,对缺相这种极端不平衡负载,对其三相电压不平衡度有很好的控制效果。具有一定的理论价值和实际应用价值。