基于混合最优控制的运载器任务中止能力评估方法
2022-07-27解永锋陈佳晔南京宏郑莉莉
解永锋 陈佳晔 韩 冬 南京宏 郑莉莉
北京宇航系统工程研究所,北京 100076
0 引言
对多级入轨航天运载器而言,为兼顾降低发射成本和提升可靠性的双重需求,在出现发动机推力下降或多台发动机中某台发动机故障关机、某个操纵舵面卡死或失效等非灾难性故障的情况下,必须能够充分利用故障下飞行器所具备的操控能力,进行中止能力评估和任务重规划,利用轨道重构、制导自适应和控制重构技术,实现飞行器的安全应急返回[1]。
运载火箭上升段飞行时间较短,故障发生后依靠地面进行任务重规划并上行指令时效性差,不能满足实时处理要求。航天飞机依靠地面离线规划出故障下任务规划指令数据库,依据故障发生的时间和等级选择相应的中止轨道进行应急返回[2]。而近年来研究较多的深空探测自主任务规划技术[3-4],主要针对深空环境不确定性、信息传输时延大的特点,采用诸如遗传算法的智能规划算法[5]对飞行动作执行序列进行在线自主规划,以满足时间、资源等约束条件。而对于近地空间运载器飞行任务,具有信息传输时延小,空间环境可以精确预知和建模[6],且随着现代计算机技术的快速发展,可以采用基于最优控制理论的方法,将故障下飞行轨道重构问题以最优控制问题进行描述[7-8],采用伪谱法[8]或凸规划[9]等直接法将最优控制问题离散成有限维的非线性规划问题,然后利用成熟的非线性规划方法,发挥其搜索优化收敛速度快的优势[10-11],进行故障下能力评估和飞行轨道重构。
本文以包含重复使用一子级(助推级,Reusable Booster, RB)和一次性上面级的两级入轨运载器为例,典型飞行任务剖面如图1所示。RB与携带有效载荷的上面级火箭并联垂直起飞,在一定的高度和速度下,RB主发动机关机,并实现与上面级火箭分离。分离后上面级携带有效载荷经由火箭发动机推进入轨,而RB无动力返回,最终实现水平着陆。
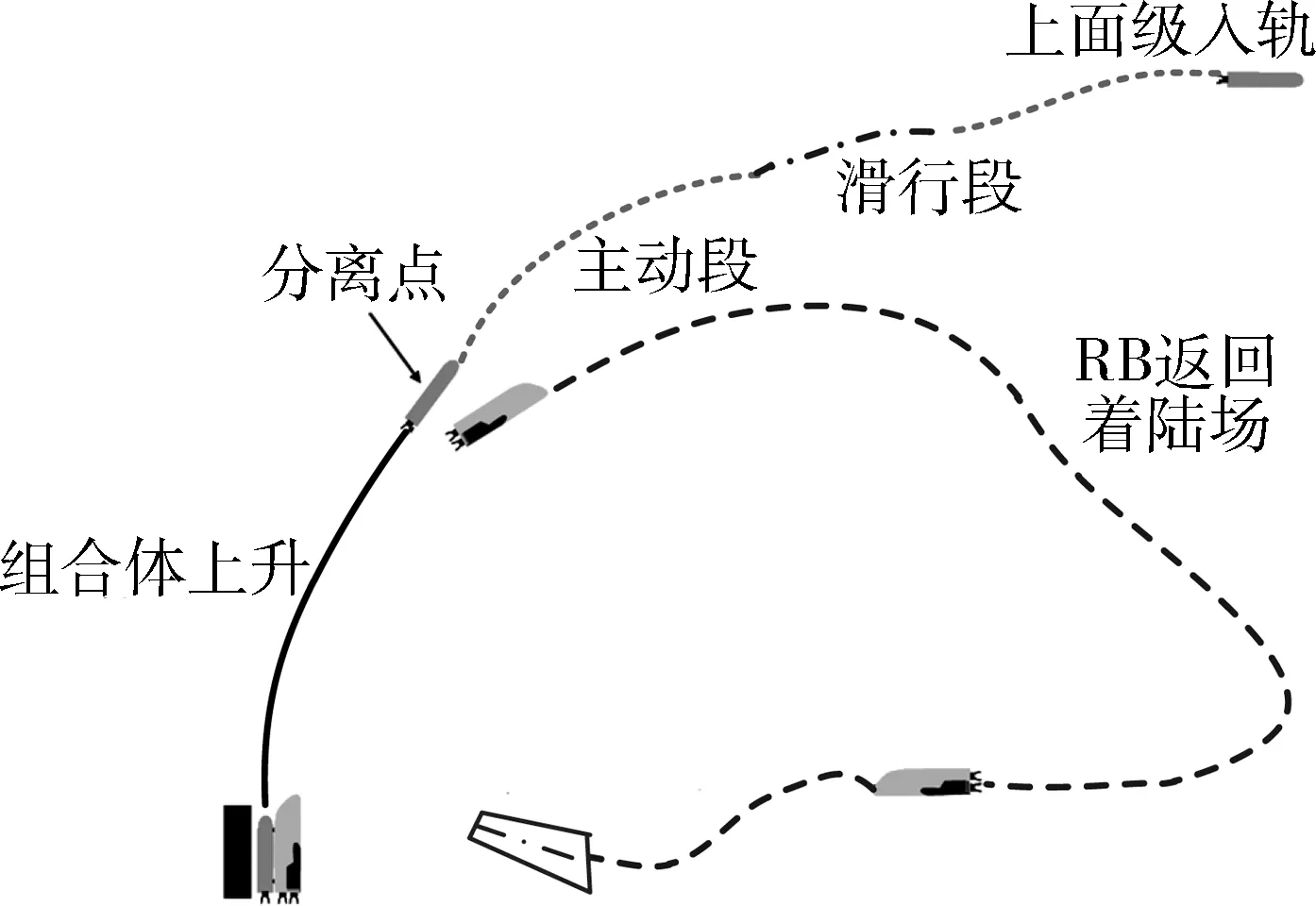
图1 典型RB飞行任务剖面
不失一般性,本文以RB-上面级并联两级入轨运载器为例,首先描述了混合最优控制问题及基于混合最优控制的RB飞行任务规划建模;以此为基础建立了适用于多级入轨运载器的中止能力仿真评估框架;进而仿真计算了典型推进系统故障模式下助推级RB的中止能力。
1 飞行任务规划建模
采用混合最优控制的方法研究助推级可重复使用的两级入轨运载器,可以在统一的框架下综合分析评估上面级的入轨能力以及RB的返回机动能力。特别在主动段出现发动机故障的情况下,采用混合最优控制的方法,可以最大化RB的应急中止能力以及上面级的入轨能力,进而显著降低任务失败的风险。
1.1 混合最优控制问题描述
多主体系统的飞行任务规划问题可以采用混合最优控制的方法求解[12-13]。混合最优控制问题包含分类变量,属于常规最优控制问题的延伸。分类变量是离散值变量,而在连续集上取值的变量为连续值变量,分类变量可生成视为时间的分段常值函数的离散序列,而连续值变量可生成时间的连续或不连续函数。采用混合控制理论研究多主体系统的任务规划,可以将安全性、可靠性等高层任务规划指标抽象为高层离散决策变量考虑进来,进一步加快任务规划的求解速度,提高任务规划的自主性、智能性。
混合最优控制问题具体可以离散状态、连续时间动力学、飞行任务时序及性能指标等要素来描述。
1.2 飞行任务规划建模
1.2.1 离散状态

(1)
(2)
1.2.2 连续时间动力学方程
1)如果离散变量p∈{pa,pb,pc,pg,ph},则状态变量x和控制变量u分别为
建立在惯性坐标下的三自由度动力学方程为
(3)
(4)
(5)
其中:r,V是惯性位置和速度向量;g=-(μ/r3)r,为重力加速度向量;Tvac为最大真空推力幅值;η>0是发动机节流阀值;Isp是发动机比冲,单位为s;m为飞行器质量,随着燃料消耗,逐渐减小;g0是海平面重力加速度大小;1b表示飞行器纵轴方向单位向量;发动机推力T与飞行器纵轴方向相同。向量A,N为气动力在飞行器纵轴和法向的分量。
式中,推力T,Tvac,Isp,η与离散变量p的取值有关系,如果p对应组合体飞行,则T,Tvac,Isp,η是RB主发动机的参数;如果p对应上面级飞行段,则T,Tvac,Isp,η是上面级火箭发动机的参数;且根据是否存在发动机推力,可分类表述为

(6)
当p∈{pa,pb,pc}时,A,N表示组合体飞行段的气动轴向力和法向力;若p∈{pg,ph},上面级在大气层外飞行,不考虑气动力效应,A=N≡0。
2)如果p∈{pf},对应RB返回飞行段,则取状态变量x和控制变量u分别为
x=[h,V,μ,λ,γ,ξ]T∈R6,u=[α,σ]T∈R2
建立在球面坐标系下的三自由度RB返回动力学方程为

(7)
(8)
(9)

(10)
(11)
(12)
3)如果p∈{pd,pe},对应组合体分离后RB和上面级两体独立飞行段,以下标U和B表示上面级和RB,则状态变量和控制变量可写为
(13)
动力学方程包含式(3)~(5)以及式(7)~(12)。
1.2.3 连续值状态和控制空间
组合体上升过程中要满足动压、弯矩及推力加速度等约束,RB返回过程中要满足法向过载、动压及热流率等约束,所以状态-控制空间是受限的。
当p∈{pa,pb,pc},对应组合体上升段的动压、弯矩和推力加速度约束,表示为
(14)
其中,qmax,Tamax分别为动压、推力加速度约束的上界;[qα]min,[qα]max为弯矩约束的上下边界。当p∈{pd,pe},对应分离后RB返回动压、法向过载、热流约束以及上面级推力加速度约束;当p∈{pf},对应RB返回段动压、法向过载和热流约束,表示为
(15)

(16)
(17)
当p∈{pg,pn},对应上面级推力加速度约束,与式(14)中推力加速度约束表述一致。
(二)有效的评价手段和方法。明确了评价的目的,就要对评价的手段和方法多动些脑筋了。对学生的数学学习评价应该是多种评价形式形结合,比如纸笔测验、课堂观察、课后谈话、作业分析等多种形式对学生在知识与技能方面进行客观的评价,过程与方法上予以鼓励与批评相结合的方式,在情感态度价值观方面进行积极的鼓励多于批评的方式,当然,评价有法,但无定法。
1.2.4 飞行任务时序及性能指标
Ps=[pa,pb,pc,pd,pe,pf,pg,ph]
根据混合最优控制理论构建离散控制空间[12],再求解整型规划问题即可得到可行飞行任务序列。比如飞行时序ps=[pb,pd,pe,pg],表示组合体发射升空,分离成两主体飞行模式(pd),然后上面级进入滑行段(pe),最后上面级推进入轨(pg),RB达到飞行终端的时刻小于上面级。若飞行时序ps=[pb,pd,pe,pd,pf],上面级仍采用推进-滑行-推进的模式入轨,但RB达到飞行终端的时刻要大于上面级。对于正常的RB飞行任务而言,可首先采用飞行时序ps=[pb,pd,pf]或ps=[pb,pd,pg]进行最优轨迹计算。为节省燃料(亦是最优性要求),上面级的飞行轨迹肯定会存在控制量η=0的飞行段,即无动力滑行段,然后根据优化结果再对上面级入轨加入滑行段,重新计算最优飞行轨迹。
燃料消耗是评估任务可行性的重要指标,对于所研究的RB飞行任务而言,应尽可能最小化上面级燃料消耗。由于上面级的初始质量是固定的,最小化燃料消耗等价于最大化终端入轨质量,则性能指标可定义为
J=-m2f
(18)
2 自主任务规划策略
RB推进系统故障模式和故障时刻会同时影响RB应急返回的能力以及上面级的入轨能力。须在中止能力评估的基础上进行任务重规划。
2.1 RB与上面级中止模式
2.1.1 RB应急返回中止模式
1)返回发射场(Return To Launch Site, RTLS)
当故障发生致使运载器必须偏离其预定轨道并飞回原发射场。这种中止模式通常使用在飞行剖面的前期,此时运载器通常是满载的,质量远大于设计的着陆质量。采用这种模式,必须能够采取一切可行措施,执行推进剂卸载、上面级提前分离等,以满足返回所需高度、速度、质量和姿态等要求。RTLS是所有中止模式里最复杂的一种,需要运载器在满足加速度过载、飞行速度、高度等约束的前提下,执行复杂的倾斜/转弯机动;
2)下射程段着陆(Down-Range Landing, DRL)
故障致使飞行器不能在预设着陆场着陆,但可以在备用着陆场应急着陆。一般情况下,由于原发射场设施、勤务人员完备,期望可以执行RTLS,但故障类型和故障时刻可能不允许执行RTLS。另外,由于执行RTLS的复杂性,在RTLS和DRL均可选择的情况下,应该优先选择DRL中止模式。
2.1.2 上面级中止模式
由于上面级火箭携带的燃料通常会有裕量,若故障出现时间较晚或推力损失较小,采用轨道重构技术可以得到满足终端约束的最优中止轨迹,实现上面级的正常入轨或降级入轨,即执行中止入轨(Abort To Orbit, ATO)中止模式。另外,由于上面级火箭是一次性的,不考虑类似航天飞机采用的绕地球一圈再中止返回的模式。
2.2 中止能力计算框架
对于所研究的RB与上面级并联两级飞行器,采用下图2所示中止能力仿真计算器评估给定故障模式下飞行器的中止能力,亦即任务完成能力评估。计算得到的中止能力必须能够反映故障下飞行器的可用最大操纵性能。这里基于最优控制的基本思想,采用HOP-PS(混合最优控制-伪谱)快速轨迹优化算法[14],将中止能力计算问题转化为一系列轨道优化计算问题。采用这种方法可以最大限度利用故障下飞行器的操控能力,精确评估其中止能力。
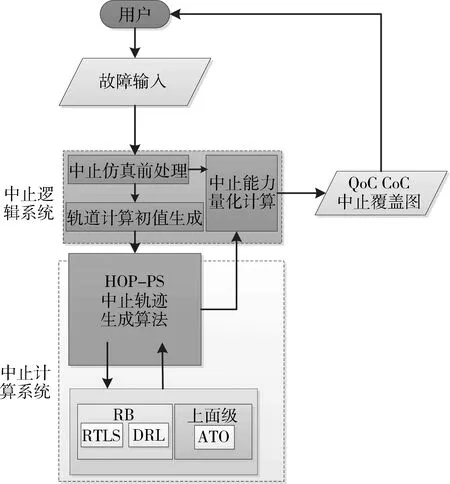
图2 中止能力计算框架
图2中故障输入模块由用户输入,代表要评估的故障模式及相关信息,比如单台发动机故障关机、节流阀可调范围变小等。中止逻辑系统的中止仿真前处理模块负责将故障模式转化为适合数值轨道计算的数学描述形式,并加入由故障引入的飞行约束,然后根据故障类型生成轨道优化计算所需初值。初值的计算要尽量反映故障对轨道控制量及飞行状态造成的影响,以提高优化算法的收敛速度和求解精度。中止逻辑系统还包括中止能力量化计算模块,负责对中止计算系统计算得到的结果进行处理,统计分析每种中止模式的覆盖范围,计算以覆盖品质和覆盖完整度QoC,CoC表示的中止量化指标[15],并最终反馈给终端用户。
2.3 任务规划系统
中止计算系统,也可以称为任务规划系统,以HOP-PS快速中止轨迹生成算法为基础,接受中止逻辑系统中初值生成模块计算得到的优化初值,并根据RTLS、DRL、ATO中止模式的信息,综合评估上面级的入轨能力(正常入轨或执行ATO中止模式)以及RB的应急返回能力。轨道重构可以实现RB返回预设着陆场或执行RTLS、DRL中止模式。具体的算法计算结构如图3所示。首先根据输入的故障信息,采用HOP-PS算法计算评估上面级的入轨能力,然后根据上面级的入轨能力,设定上面级终端约束以及计算RB返回可达域时所用的性能指标,最后根据RB应急返回能力评估结果进行组合体全程轨道重构,得到组合体全程最优中止轨迹。
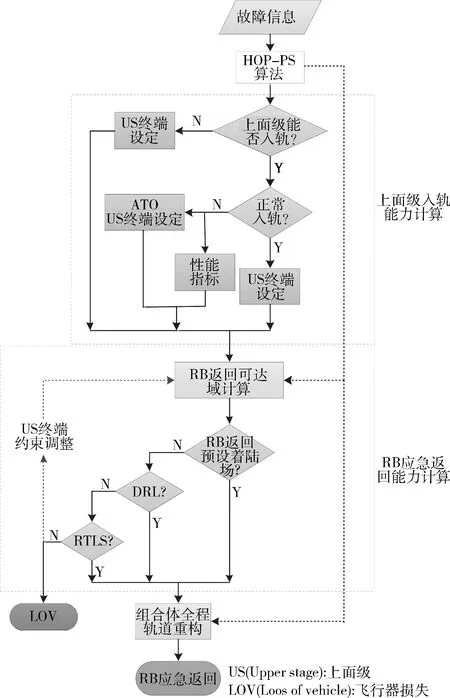
图3 RB与上面级组合体任务规划策略
3 算例分析
3.1 初始条件
以发动机节流阀可调范围缩小故障为例,进行任务规划分析,分析RB-上面级两级入轨运载器中止能力以及特定故障时刻的最优中止轨迹。假设所研究的RB与上面级组合体共100t,RB主发动机比冲Isp1=288s;上面级初始质量m20为12吨,发动机比冲Isp2=364s,假设可以重复起动,并要求上面级终端质量m2f≥2300kg,以满足在轨机动需求。上面级进入轨道高度为200km的圆轨道,目标轨道要素中半长轴、偏心率、轨道倾角和赤经约束为:
a=6578145m,e=0,i=58.64°,Ω=68.09°
发射场经纬度μ0=98.48°,λ0=39.69°,RB空载质量m1f=16900kg,无动力返回预设着陆场需要满足的返回终端(进场着陆段起点)约束条件:
μf=103.52°,λf=41.05°
126m/s
上升段约束条件:
T1max=T2max=4.5go,q1max=18.9kPa
-1300N/m2·rad≤qα≤1300N/m2·rad
-15°≤α≤15°,ηfmin≤η≤ηfmax
其中,T1max,T2max分别表示并联第一级与分离后上面级的推力加速度约束上限;q1max为组合体飞行段动压约束极限值。节流阀故障下,约束下界ηfmin=0.65,ηfmax的值减小为0.85和0.7两种状态,即节流阀的可调范围由0.65~1.0缩小为0.65~0.85和0.65~0.7两种情况,并假设故障发生在垂直上升段之后。
RB返回段约束:

与上面级分离点约束:
-5°≤αs≤5°,15°≤γs≤45°
3.2 中止能力
基于前面建立的中止能力评估框架,故障时刻从垂直上升段结束点(11.54s)到正常关机点168.37s变化,分别计算节流阀可调范围为0.65~0.85和0.65~0.70两种情况下飞行器中止能力。结果表明:
1)节流阀可调范围变为0.65~0.85的故障下,由于推力损失有限,仅15%,而起飞推重比为1.3,并且上面级燃料存有裕量,通过轨道重构可以实现主动段故障下的全程中止能力覆盖,RB可以应急返回预设着陆场,而上面级可以实现正常入轨;
2)节流阀可调范围变为0.65~0.70的故障下,若故障发生时间较早(11.54s~15s),故障下推重比小于1,会导致飞行器坠毁;若故障发生在15s~22s,虽然故障时刻推重比可能会小于1,但由于垂直上升末端飞行器已具备一定的高度和速度,随着燃料的燃烧,推重比很快会重新大于1,采用轨道重构技术仍可以完成飞行任务。若故障时刻大于22s,同样采取轨道重构可以实现RB应急返回预设着陆场,而上面级可以实现正常入轨。
下面以节流阀故障发生时刻为[21s, 46s, 117s]为例,计算故障下RB返回可达域,分析不同故障时刻对中止轨迹的影响,并与正常轨迹相对比。故障时刻的飞行高度、速度见表1。

表1 故障时刻的高度和速度
3.3 RB应急返回轨道分析
以最小化上面级燃料消耗作为性能指标,采用HOP-PS中止轨迹快速生成算法计算得到的故障下中止轨道关键参数见表2。下标s、1f、2f分别表示RB与上面级分离时刻、上面级入轨时刻及RB返回终端时刻。上面级与RB分离后,以推进-滑行-推进的两次变轨模式进入轨道,任务全程飞行时序序列可表述为[pb,pd,pe,pd,pg(pf)],若t1f 表2 节流阀故障下中止轨道参数 图4所示为节流阀可调范围缩小为0.65~0.70故障下,RB全程飞行航迹曲线。由于故障造成主动段飞行参数的差异,分离点参数与无故障情况不同,所以故障下RB最优返回航迹与无故障理想航迹不同。但由于最优性要求,故障下最优返回航迹与无故障最优返回航迹变化趋势一样,且均能达到所要求的终端着陆场约束(μf,λf)。另外由图4的终端局部放大图可以看出,虽然本文对RB返回的研究并未采用类似航天飞机返回过程中的终端能量管理(TAEM)和航向校准圆柱等理念,HOP-PS中止轨迹优化生成算法里面也不包含TAEM和航向校准圆柱的信息,但规划得到的返回轨迹自动使用了航向校准圆柱进行航向校准。这也进一步验证了所采用的轨道规划算法的智能性,可以简单有效地在飞行器轨迹优化中引入故障信息,进而快速、高精度地完成故障下飞行器中止轨道重构的任务。 图4 RB返回轨道(节流阀可调范围0.65~0.70) 兼顾发射成本降低和可靠性提升的双重需求,以两级入轨部分可重复使用航天运载器为研究对象,提出了一种故障下中止能力评估和任务重规划计算框架:以混合最优控制理论和直接最优轨迹优化/生成算法为基础,对设计经验和先验知识的依赖度低,可以快速分析评估故障运载器中止能力;在中止能力评估的基础上,重构生成故障下最优应急返回轨道,可以自动满足多重飞行约束条件,提高应急返回飞行的可靠性。
4 结束语
