基于运行轨迹的车辆异常行为监测与研判
2022-07-26赵昱博屈新明
赵昱博,屈新明
(深圳城市交通规划设计研究中心,广东深圳 518000)
随着我国工业化进程不断推进,人员、货物的区域间流动增长迅速,道路监管压力和事故安全风险不断加大,实时交通运行监控及安全保障工作变得愈发重要。车辆异常行为检测是交通运行安全监管中重要的一环,及时发现行为异常的车辆并持续跟踪监测,同步采取相应的管理处置措施,对于降低道路安全风险、规避交通运营事故具有重要的现实意义。
车辆行为检测方法多样,传统方式如地感线圈等应用广泛,但此类方法局限于车辆在离散点位的基础动态特征,收集到的信息较为有限,且设备需要定期更换;各类传感器,如雷达、激光等可以针对性监测多种车辆行为,但受限于代价昂贵,目前尚未整体普及。同时,当交通流中存在多种违法类型时,传统检测方法常常力不从心,漏检、误检时有发生,使其越来越不适应当前交通管理的应用趋势。
以车辆运行GPS 轨迹为基础,融合卡口图像识别算法轨迹为辅助修正,从时间、空间两个维度对融合后的车辆运行轨迹进行挖掘,评估车辆行为特征。基于不同类型交通违规行为画像拟合不同车型轨迹运行特质,实时监测判别车辆驾驶安全风险,在降低成本的同时,提升了对道路运行违法行为的监测效率。
1 轨迹获取及处理流程
基础轨迹数据由GPS 设备在车辆移动过程中上报汇集所产生,该数据包含多维度特征,涉及日期、时刻、定位、速度等基础信息,数据示例如表1所示。

表1 出租车GPS数据示例
由于受信号遮挡、干扰等原因的影响,GPS 轨迹中存在部分数据缺失的情况,直接对这些异常的轨迹数据进行处理势必会影响结果准确性和决策的可靠性。GPS 轨迹补全的主要思想为插值,基于轨迹数据特点,应用最近邻插值算法可以较为准确地对缺失的采样点进行插补,从而恢复出车辆完整的时空轨迹。
除了基础的GPS 轨迹,通过卡口视频进行数据采集,应用图像处理方法进行车辆轨迹提取,可以获得精准的离散轨迹数据。目前,基于图像处理进行车辆轨迹提取的方法的较多,文章应用计算机视觉中的Yolo3算法进行车辆轨迹提取。初步提取的轨迹数据可能存在诸多跳跃、平滑性差等缺点,应用KCF 目标跟踪算法基于历史轨迹数据对当前数据帧进行预测匹配,可以较好地解决目标检测丢失和远行无法检测到车辆等问题。
多个卡口处的离散数据通过车牌与GPS 轨迹相关联,作为样本车辆数据的补充,对基础轨迹中部分异常、缺失的点位予以清洗补全,使得车辆轨迹在时间维度上进一步细化,并进一步提升了与路网空间特征的契合程度。
2 车辆异常行为分析
基于轨迹数据实际应用,主要研究以下几种异常驾驶行为类型,如表2所示。

表2 出租车GPS数据示例
表2中,速度违章表示目标车辆在某时间段的行驶速度与当前路段或区域的设定规则不符;路线违章则表示目标车辆的行驶轨迹违反了所在道路或区域的设定;驾驶员行为风险主要集中于长时间疲劳驾驶及部分车型于夜间的红眼驾驶;区域聚集包括重点车型在特定区域的数量超限,以及随机发生的车辆异常聚集行为。
为减少轨迹数据偏差对分析结果造成的影响,文章采用较为经典的地图匹配解决方案S-T MapMatching。该类算法基于隐式马尔可夫模型,从概率的角度计算可能路径的观测概率,选取概率最大的路径作为最终的匹配结果。该方案只应用于部分异常行为分析中,如驶入禁行区、疲劳驾驶等对空间位置精度要求较低的异常检测可以忽略此步。
整体分析流程如图1所示:
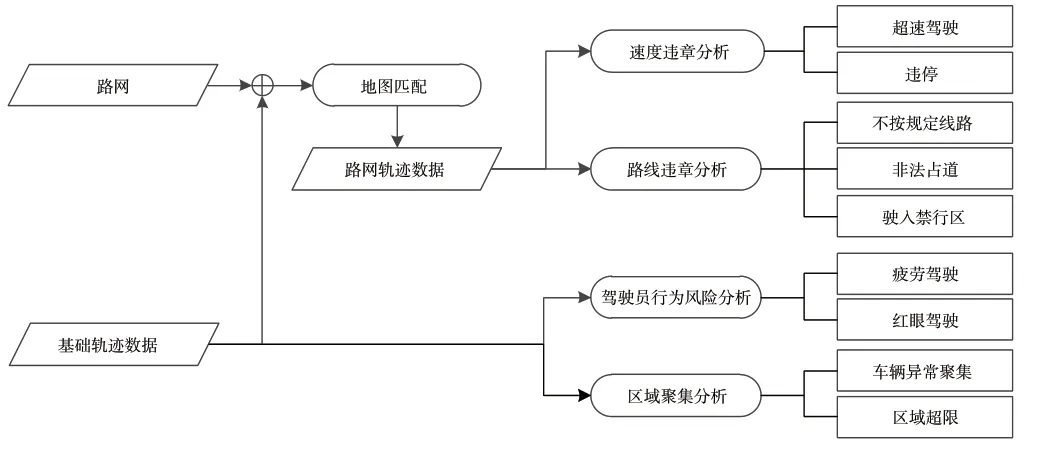
图1 分析流程图
2.1 速度违章分析
通常速度违章表示车辆的当前行驶速度违背了路段或区域的设定规则。超速违章一般为持续性的,从轨迹数据的地图打点来看,离散、偶发的速度高于设定阈值的情况通常不足以作为判定超速行驶的依据。在执行地图匹配后,车辆行驶速度指标与路段最小单元的通过时间、单元长度相绑定,单个点位的速度应服从于路段整体运行速度的判定。
对于一段连续的行驶轨迹,目标车辆往往会途经多段不同道路等级,即多段不同限速的路段,将轨迹与道路等级相关联,精细化分析车辆在不同限速路段上的超速等级分布,有助于定量分析不同车辆类型、不同时间范围、不同道路节点的违章成因,挖掘潜在风险点。如图2所示,目标车辆先后经过主干路—支路—高速路—支路—快速路共4种道路类型,吻合图中最高限速阈值曲线的车辆速度曲线即可作为判定持续超速违章的依据。
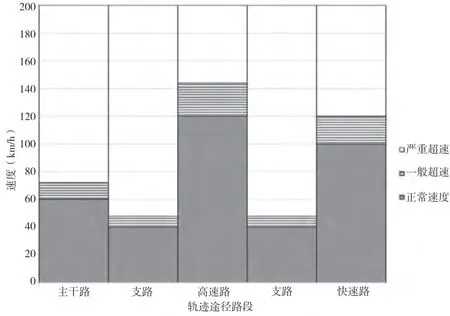
图2 轨迹超速分析
2.2 路线违章分析
路线违章指目标车辆的行驶轨迹与既定规则不符,既定规则可以基于道路或是区域,车辆行驶轨迹未与指定路段重合,抑或是驶入了禁行区域;规则也可细化至车道级,如非法占用公交车道等行为。地图匹配赋予了每辆车行程轨迹的唯一关联路段集,对于“未按规定线路行驶”项来说,在将路段规则进行标定后,可以实时、快速地获取车辆的违规信息。非法占道的判别需借助精细化的GIS 路网,并同时满足3个特定要求:特定时段驶入特定车道的特定车型。基于轨迹的路线违章判别方法整体侧重于对地理数据的把握,不同规则主导下的定量、精细化控制构成了对应特征分析的核心。

图3 未按规定线路行驶轨迹示例
2.3 驾驶员行为风险分析
疲劳驾驶的行为特征可概括为:重点车辆具有在特定时段长时间连续行驶的轨迹特征。红眼驾驶则强调客车的夜间驾驶行为。对于以上二者来说,轨迹分析侧重于对时间点的精准把握,基于插值后的轨迹数据满足时间粒度的分析要求,可以直接作为中间数据予以量化分析。疲劳驾驶的核心在于驾驶与休息时间的判定,当车辆处于停止状态时,可应用决策树等方法基于停驻点区域类型对驾驶员行为(是否休息)作分类判别。
2.4 区域聚集分析
以区域异常聚集为例,常用的分析方法为DBScan 密度聚类算法,基于同时间段车辆点位经纬度作区域密度分析,筛选大于设定阈值的区域,结合区域地理位置、周边用地等信息对该事件类型做出判断,并及时通知相关部门进行跟踪处理。出于交通事故告警、突发事件处理及疫情防控的需要,区域聚集的实时性需求较高,同时也对数据可靠性提出了一定要求。基于GPS 及卡口数据互补的治理策略较好的弥补了单一数据源的数据质量短板,在实际应用中发挥了较高的应用价值。

图4 插值后的轨迹时空图
2.5 统计数据结果
基于文章方法,对深圳市某区域15:00—21:00时段的车流进行测试,车型包括出租车、百度导航车、客运班车、泥头车等共计7种,有效样本共计33256辆,区域内包含所有等级类型道路。测试结果如表3所示。因未接入全类型车辆数据,测试结果略有偏差。
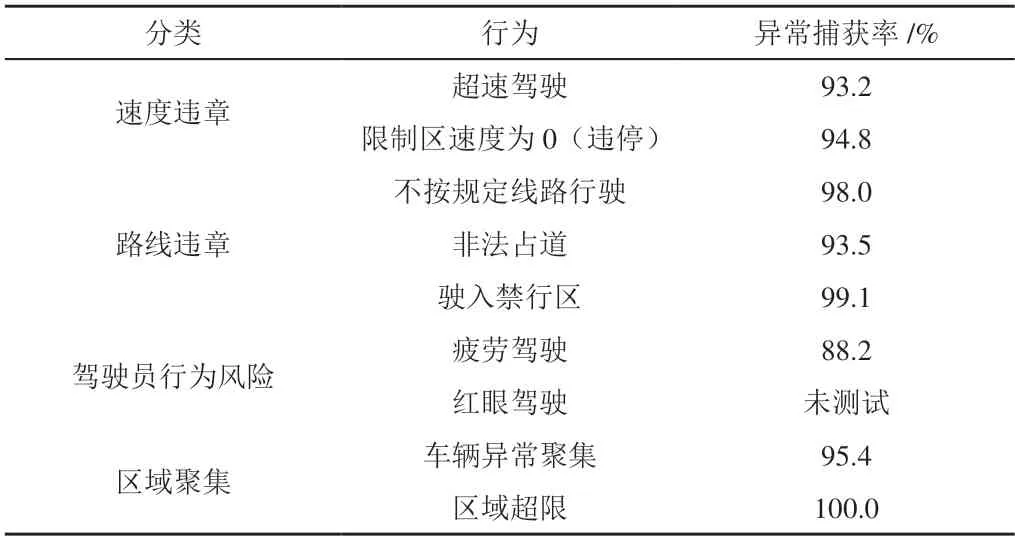
表3 出租车GPS数据示例
3 结束语
以车辆运行GPS 轨迹为基础,融合卡口图像识别算法轨迹为辅助修正,从时间、空间两个维度对融合后的车辆运行轨迹进行挖掘,评估车辆行为特征,基于不同类型交通违规行为画像拟合不同车型轨迹运行特质,实时监测判别车辆驾驶安全风险。经过实际测试,该方案在降低成本的同时有效提升了对道路运行违法行为的监测力度。
