西南区坡耕地紫色土离散元模型参数标定
2022-07-26聂晨旭杨明金李守太杨玲赵立军陈小兵
聂晨旭,杨明金*,李守太,杨玲,赵立军,2,陈小兵
西南区坡耕地紫色土离散元模型参数标定
聂晨旭1,杨明金1*,李守太1,杨玲1,赵立军1,2,陈小兵3
1. 西南大学工程技术学院, 重庆 400715 2. 重庆文理学院智能制造工程学院, 重庆 402160 3. 农业农村部南京农业机械化研究所, 江苏 南京 210014
土壤离散元模型是离散元法研究土壤与触土部件相互作用的基础。为了获得西南区坡耕地紫色土离散元模型,本文基于堆积试验,采用EDEM2020软件中的Hertz-Mindlin with JKR接触模型,以休止角为响应值,结合土壤本征参数实测试验,对模型参数进行标定。实测参数包括土壤密度、含水率、休止角、粒径分布、颗粒-颗粒静摩擦系数、颗粒-45钢静摩擦系数,利用Origin2021b软件图像数字化工具处理图像,得到实际休止角为34.11°,变异系数为0.452%。利用Design-Expert11软件设计了Plackett-Burman试验,对影响拟合休止角的9个参数进行筛选,得到4个影响显著参数,即颗粒表面能、颗粒-颗粒滚动摩擦系数、颗粒-45钢静摩擦系数、颗粒-45钢滚动摩擦系数。设计最陡爬坡试验进一步缩小模型参数取值范围,设计Box-Behnken试验,对模型进行分析优化,得到4个参数最优组合,即颗粒表面能0.134 J/m2,颗粒-颗粒滚动摩擦系数0.231,颗粒-45钢静摩擦系数1.045,颗粒-45钢滚动摩擦系数0.228。结果表明,仿真休止角与实际休止角相对误差为2.07%,一致性较好,可为紫色土离散元仿真研究提供参考。
耕地; 土壤; 离散元模型
西南区包括重庆、四川、贵州、云南等,地形以丘陵山地为主。西南区的坡耕地总面积为991.5万hm2,占全国坡耕地面积的41.4%,是我国坡耕地最集中的地区[1-4]。紫色土是西南区的主要农耕地土壤类型,是多种农业产品和林木产品的生产温床[5]。目前西南区丘陵山地机械化水平相对偏低,除了地形复杂多样使中大型农业机械设备难以运用之外[6-9],紫色土的黏性也会导致耕作机具作业效率降低,农作物机械化采收难度增加。针对土壤和触土部件相互作用问题,常用数值分析方法研究,即根据实际情况对土壤和触土部件的相互作用过程进行仿真分析,这就要求必须有精确的土壤模型。
由于塑性理论、有限元理论等在散粒体动力学上的应用效果并不理想[10],Cundall PA等[11]提出的离散元法逐渐成为散粒体研究领域的主流[12,13]。于建群等[14]建立了开沟器和土壤的二维离散元模型,并分析了不同情况下开沟器的工作阻力;李艳洁等[15]利用TRUBAL离散元程序[16]模拟了圆锥指数仪贯入沙土的试验,并进行了数值研究。但早期相关研究存在物料离散元模型不能很好地反映实际的问题,从而导致试验误差较大。因此建立合适的散粒物料模型逐渐成为研究热点。颗粒接触模型的选择和仿真参数的设置是影响离散元仿真置信度的两个最重要的因素。接触模型需要根据实际情况和经验选择,仿真参数则分为本征参数和接触参数,物料的本征参数测量比较方便,而大多数接触参数测量比较困难。因此,许多学者采用逆向标定的方法来获得这些参数的具体数值。其思路是不断试错、调整,直至仿真模型与实际模型的宏观力学表现相符,如休止角、孔隙率等,该过程即仿真虚拟参数标定试验[17]。邢洁洁等[18]自主设计了试验装置来测量部分接触参数的取值范围,并以休止角为响应值对海南热区砖红壤接触参数进行了标定;Hoshishima C等[19]提出了一种非球形黏聚颗粒的仿真参数标定程序,并利用该方法获得了多种材料的仿真参数,证明了其广泛适用性;王黎明等[20]提出了两侧拟合直线倾角平均值法作为堆积角的测量方法,并对不同含水率的猪粪接触参数进行了标定;丁文波等[21]在EDEM软件中建立了仿青稞种子几何结构的颗粒三维模型,并对青稞种子接触参数进行了标定。
本文以标定西南区坡耕地紫色土模型参数为目的,实际测量紫色土部分本征参数和接触参数,使用Plackett-Burman试验、最陡爬坡试验和Box-Burman试验方法,以休止角为响应值,筛选出对休止角影响显著的仿真参数,分析其交互作用,确定其最佳取值,最后将最佳参数条件下的仿真休止角和堆积效果与实际土壤进行对比验证,为后续西南区紫色土与耕作部件相互作用研究提供参考。
1 材料与方法
1.1 材料与仪器
土壤样品采自西南大学试验田(北纬29°48′49″,东经106°24′36″),为丘陵山区典型紫色土。试验仪器包括FBS-760A卤素水分测定仪(生产商:厦门弗布斯检测设备有限公司)、标准环刀(生产商:南京俱全土木工程仪器有限公司;规格:ϕ61.8×20 mm)、LQ-C20002电子天平(生产商:昆山优科维特电子科技有限公司;量程:2000 g;精度:0.01 g)、标准检验筛GB/T6003.1-2012(生产商:绍兴市上虞华丰五金仪器有限公司;筛网由上至下孔径规格为2 mm、1 mm、0.5 mm、0.25 mm、0.1 mm、0.05 mm)、定制漏斗(出口直径ϕ25 mm)、食品保鲜膜、裁土刀、漏斗三脚架等。
1.2 试验方法
1.2.1 本征参数和部分接触参数测定(1)测定土壤含水率和密度。用环刀和裁土刀取土,挑拣出植物残根、石块等杂质,用食品保鲜膜保存土样,用卤素水分测定仪测定含水率,用电子天平测定密度。
(2)测定土壤粒径分布。采用筛分法测定土壤粒径分布,取土样1000 g,挑拣出植物残根、石块等杂质,通过标准检验筛逐步筛分,用电子天平测定各粒级的土壤质量,并计算百分比。
(3)测定休止角。颗粒物料堆载于水平面上形成锥体,其母线与水平面的交角即为休止角。休止角大小受颗粒间静摩擦系数、滚动摩擦系数、粒径分布等影响,能很好表征颗粒物料物理性质[22-26]。
采用定制漏斗、三脚架和45钢板做自然堆积试验,如图1所示。将土壤倒入漏斗内,使土壤自然落下堆积成锥体,用相机记录休止角。

图 1 休止角测定
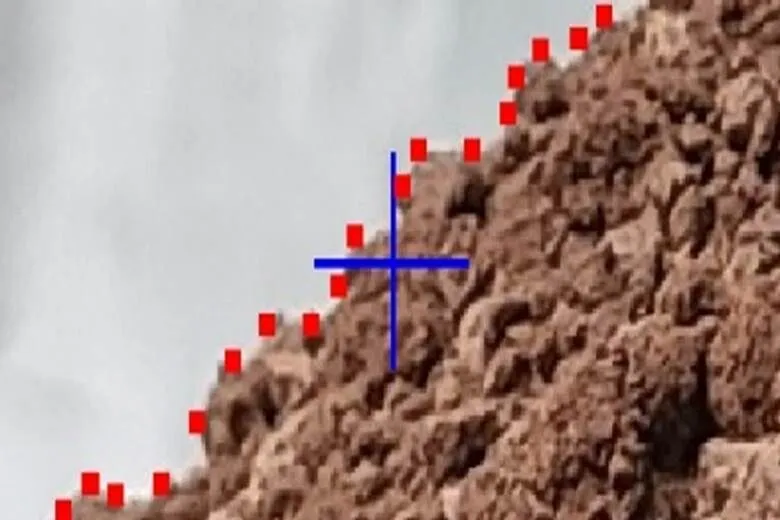
图 2 图像数字化工具
为减小人工测量误差,利用Origin2021b软件中的图像数字化工具提取锥体母线边界像素点进行线性拟合,6次重复,通过直线斜率计算休止角,如图2所示。

其中,为颗粒重力,1为板上重力切向分量,2为板上重力法向分量,为支持力,为摩擦力,为斜板倾斜角,为颗粒-45钢静摩擦系数。
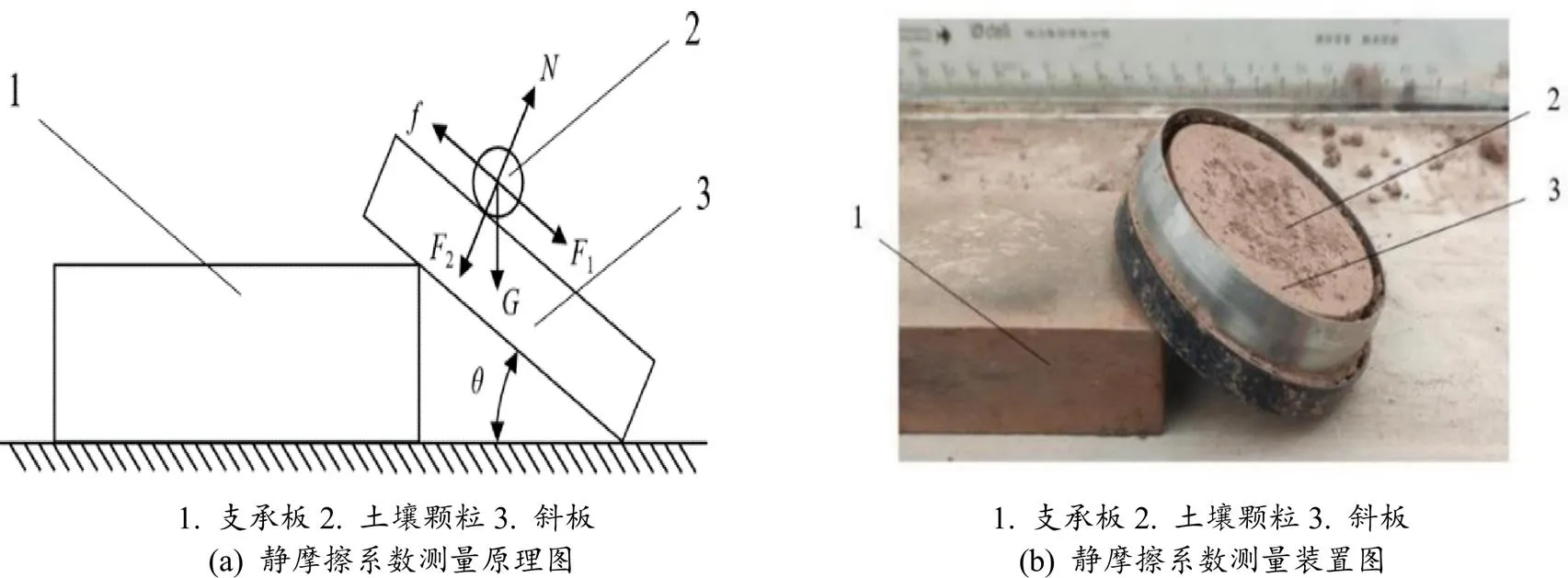
图 3 静摩擦系数测量试验
土壤颗粒-颗粒静摩擦系数测量采用样本土壤制成斜板(土粒板),如图3b所示。缓慢抬升斜板,直到所有土壤颗粒都滑落为止,用相机记录刚开始有颗粒滑落时和颗粒完全滑落时的倾斜角度,重复20次试验,由(2)式计算静摩擦系数。
1.2.2 仿真设置和预试验(1)选取颗粒接触模型。在EDEM软件中,常用的颗粒接触模型有Hertz-Mindlin(no slip)模型、Hertz-Mindlin with bonding模型、Hertz-Mindlin with JKR模型、Linear Cohesion模型等,需要根据不同工况选择不同的接触模型[27]。Hertz-Mindlin(no slip)模型为基础的颗粒模型,适用于常规颗粒;Hertz-Mindlin with bonding模型适用于颗粒板结成块,模拟其断裂或破碎等问题;Linear Cohesion模型为传统的颗粒黏结模型,与Hertz-Mindlin with JKR模型的不同点是,该模型的黏结力只存在于法向,而JKR模型在颗粒法向和切向上均存在黏结力[28]。
Hertz-Mindlin with JKR模型适用于药粉、颗粒农作物、矿石、泥土等颗粒物料,特别是颗粒间因静电力、含水等原因发生黏结和团聚等情况,西南区气候湿润,坡耕地紫色土易黏结成块,故本文选取Hertz-Mindlin with JKR模型作为颗粒间的接触模型。
(2)设置仿真参数。考虑到黏湿土壤实质为大量细球颗粒黏结成不规则形状,故在EDEM软件中选择单颗粒模型,利用含湿颗粒间的黏结力让其自行黏结,而不再预先设定多颗粒不规则体。颗粒物理半径设定为2 mm,颗粒粒径分布参考实际粒径分布进行设定。
箱体材料为45钢。颗粒工厂位置设定在箱体中心,工厂类型为动态颗粒工厂,颗粒工厂虚拟平面位置与实际试验中漏斗出口位置一致,仿真时间为5s,整体装置如图4所示。
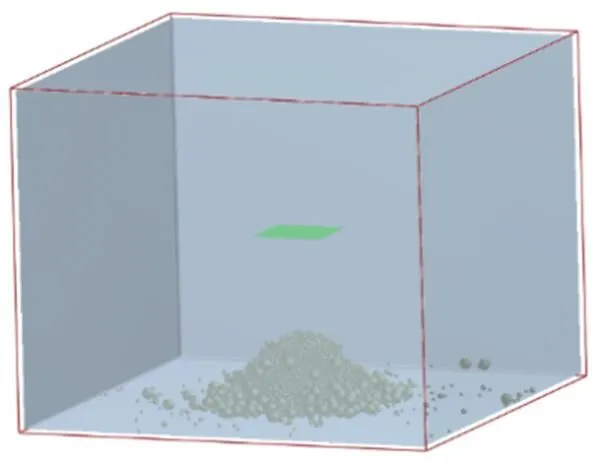
图4 仿真试验装置
(3)预试验。需要标定的参数包括颗粒表面能、颗粒泊松比、颗粒剪切模量、颗粒-颗粒静摩擦系数、颗粒-颗粒滚动摩擦系数、颗粒-颗粒恢复系数、颗粒-45钢静摩擦系数、颗粒-45钢滚动摩擦系数、颗粒-45钢恢复系数,共9个。在EDEM2020中使用前述参数设置进行预试验,结合前述实测静摩擦系数试验,得到各参数取值范围,使堆积过程和结果符合实际效果。
1.2.3 试验设计(1)Plackett-Burman试验。根据实测试验和预试验进行Plackett-Burman试验,目的是找出诸多因子中对评价指标影响较为显著的因子。对前述9个因子进行考察,以休止角为评价指标,每个因子设定高(+1)、低(-1)两个水平,利用Design-Expert11软件设计试验(表1)。

表 1 Plackett-Burman试验设计因子水平表
(2)最陡爬坡试验。根据Plackett-Burman试验结果进行最陡爬坡试验,目的是进一步缩小已选出的影响显著因子的取值范围。根据因子正负效应确定爬坡方向,通过所得休止角的大小找到与实际休止角最接近一组,作为Box-Behnken试验中心水平。
(3)Box-Behnken试验。根据最陡爬坡试验结果进行Box-Behnken试验,目的是找到各因子与评价指标之间的拟合模型。以(颗粒表面能)、(颗粒-颗粒滚动摩擦系数)、(颗粒-45钢静摩擦系数)、(颗粒-45钢滚动摩擦系数)为因子,休止角为评价指标,利用Design-Expert11软件设计试验,因子水平见表2。

表 2 Box-Behnken试验设计因子水平表
2 结果与分析
2.1 土壤本征参数测定结果
通过实验,测得土壤含水率为10.54%,土壤密度为1650 kg/m3,休止角平均值为34.11°,变异系数为0.452%,颗粒-45钢静摩擦系数范围为0.7~1.2,颗粒-颗粒静摩擦系数范围为0.5~1。土壤粒径分布和土壤质地成分结果见表3、表4。根据测定结果,试验用土壤为壤质砂土[29]。

表 3 颗粒粒径分布

表 4 土壤质地成分
2.2 各因子初步取值范围
根据预试验和实测实验,并结合其他文献[30]中数据,确定各因子初步取值范围,见表5。

表 5 因子初步取值范围
2.3 Plackett-Burman试验结果与分析
根据Plackett-Burman因子水平表进行试验设计,测试结果见表6,利用Design Expert11软件对结果进行方差分析和回归分析,分析结果见表7。
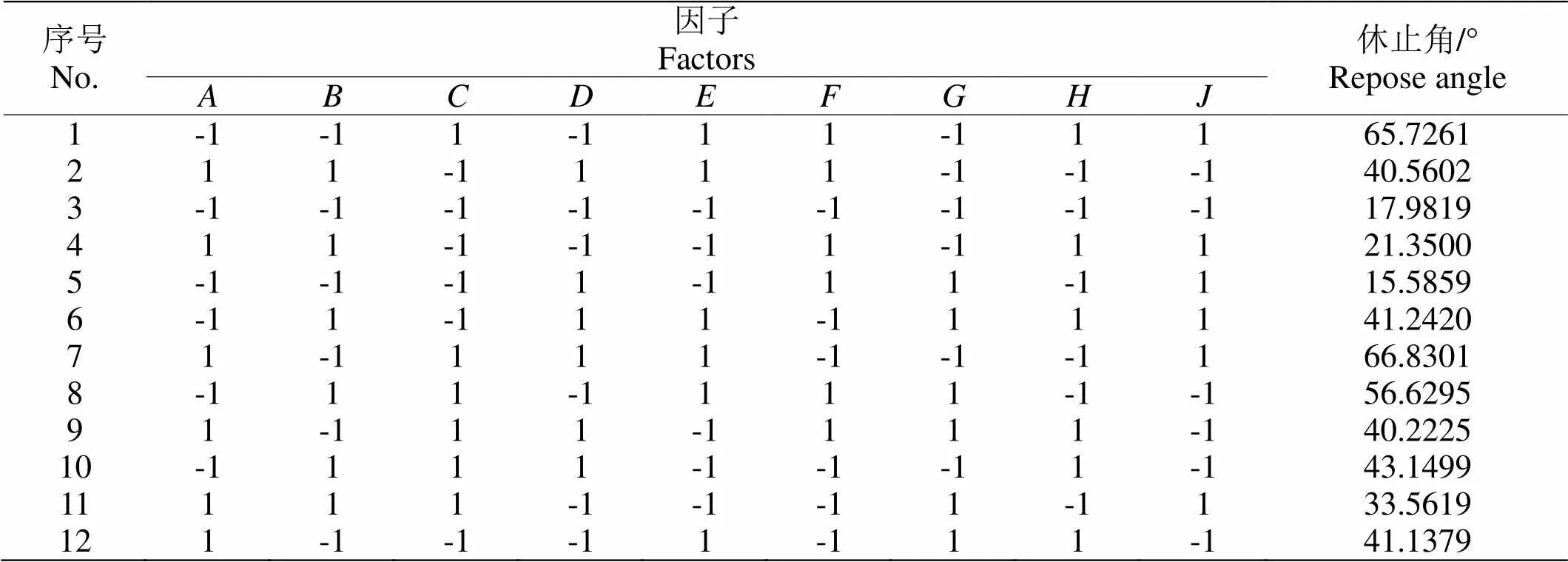
表 6 Plackett-Burman试验结果
对表6中的数据进行分析,得到各因子关于休止角的多元一次回归方程为:

其中,为休止角,单位为°。
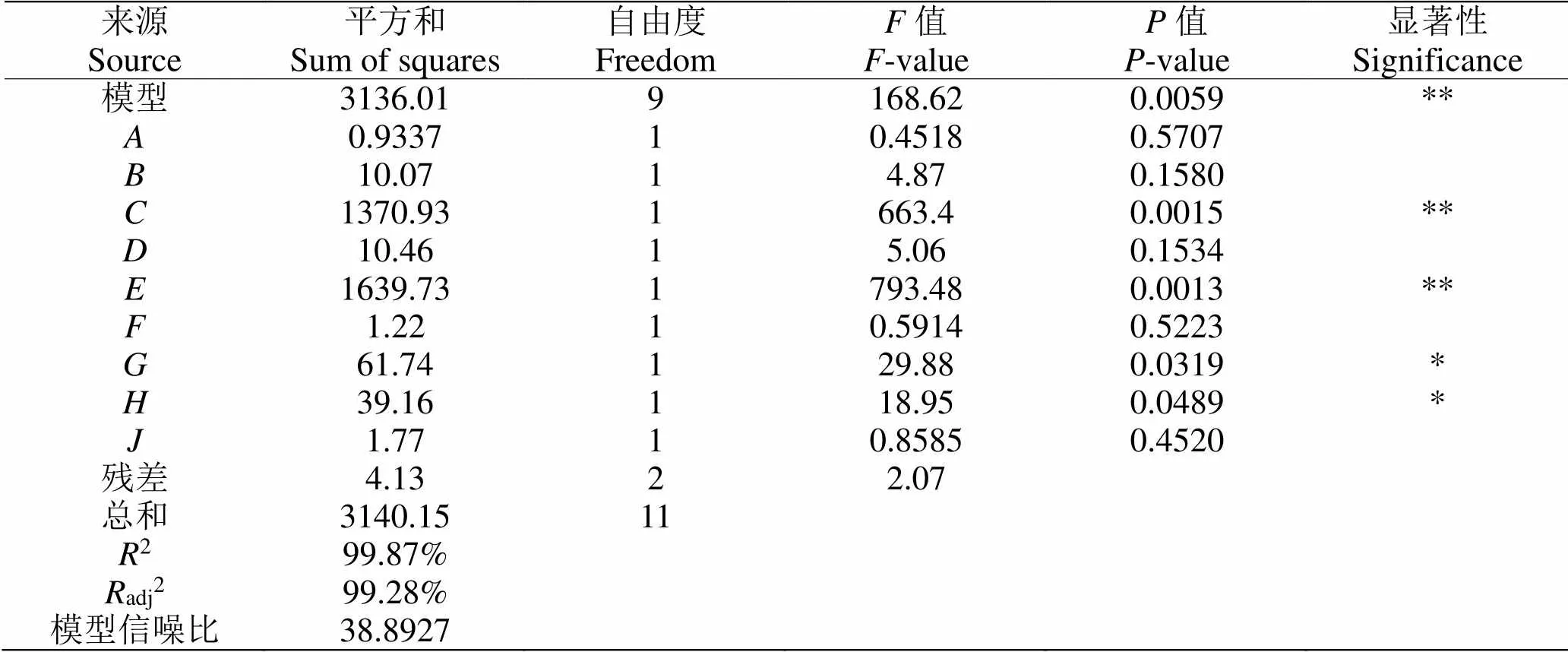
表 7 Plackett-Burman试验统计分析
注:“**”表示影响极显著(<0.01),“*”表示影响显著(<0.05)。下同。
Note: "**" means extremely significant influence (<0.01), "*" means significant influence (<0.05). The same as follows.
由表7可知,模型的值>1,值<0.01,表明模型差异性极显著,模型设计合理。(颗粒表面能)、(颗粒-颗粒滚动摩擦系数)表现为极显著(值<0.01),(颗粒-45钢静摩擦系数)、(颗粒-45钢滚动摩擦系数)表现为显著(值<0.05),说明休止角大小主要被这4个因子影响。(颗粒泊松比)、(颗粒剪切模量)、(颗粒-颗粒静摩擦系数)、(颗粒-颗粒恢复系数)、(颗粒-45钢恢复系数)均表现为不显著(值>0.05),说明休止角大小几乎不被这5个因子影响。模型的决定系数2=99.87%,调整决定系数adj2=99.28%,说明该模型能解释99.28%因子变化,拟合度较好。模型信噪比(Adeq Precision)=38.8927>4,说明模型信号充足,能很好地实现指导预测作用。
由于(颗粒泊松比)、(颗粒剪切模量)、(颗粒-颗粒静摩擦系数)、(颗粒-颗粒恢复系数)、(颗粒-45钢恢复系数)均表现为不显著,故取其取值范围的中间值进行下一步试验,即(颗粒泊松比)=0.33,(颗粒剪切模量)=5×107Pa,(颗粒-颗粒静摩擦系数)=0.75,(颗粒-颗粒恢复系数)=0.3,(颗粒-45钢恢复系数)=0.3。下一步对(颗粒表面能)、(颗粒-颗粒滚动摩擦系数)、(颗粒-45钢静摩擦系数)、(颗粒-45钢滚动摩擦系数)4个因子进行最陡爬坡试验,考察其最优水平范围。
2.4 最陡爬坡试验结果及分析
根据Plackett-Burman试验设计得出的4个影响显著因子及其正负效应设计最陡爬坡试验,测试结果见表8。由表8可知,随着(颗粒表面能)、(颗粒-颗粒滚动摩擦系数)、(颗粒-45钢滚动摩擦系数)的增加和(颗粒-颗粒45钢静摩擦系数)的减少,休止角逐渐增加。第3组试验休止角为38.1134°,比其他组更接近目标休止角34.11°,说明该组各因子数值比较接近最优取值区间,故选择第3组为Box-Behnken试验设计中心点。
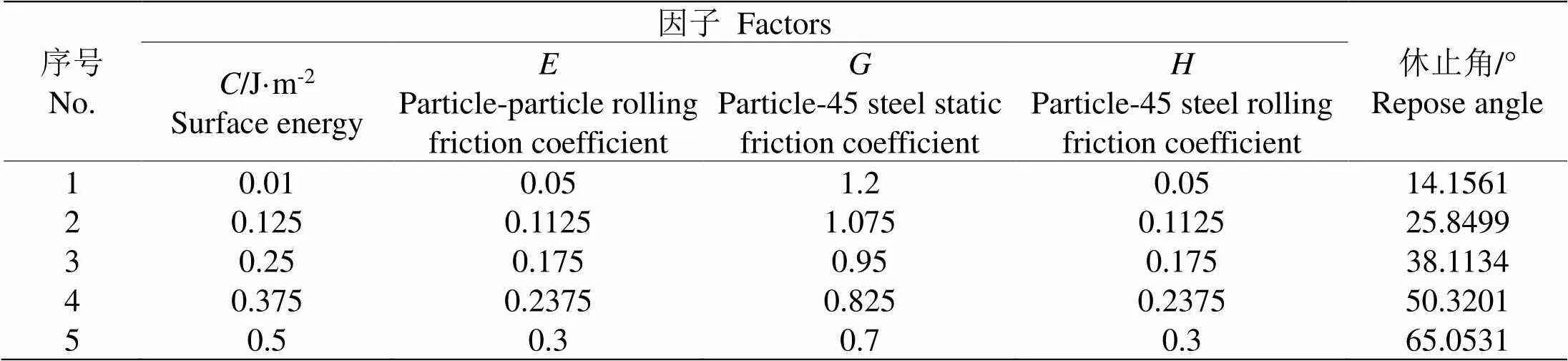
表 8 最陡爬坡试验设计及结果
2.5 Box-Behnken试验结果及分析
根据Box-Behnken因子水平表进行试验设计,试验结果见表9。对结果进行方差分析和回归分析,分析结果见表10。
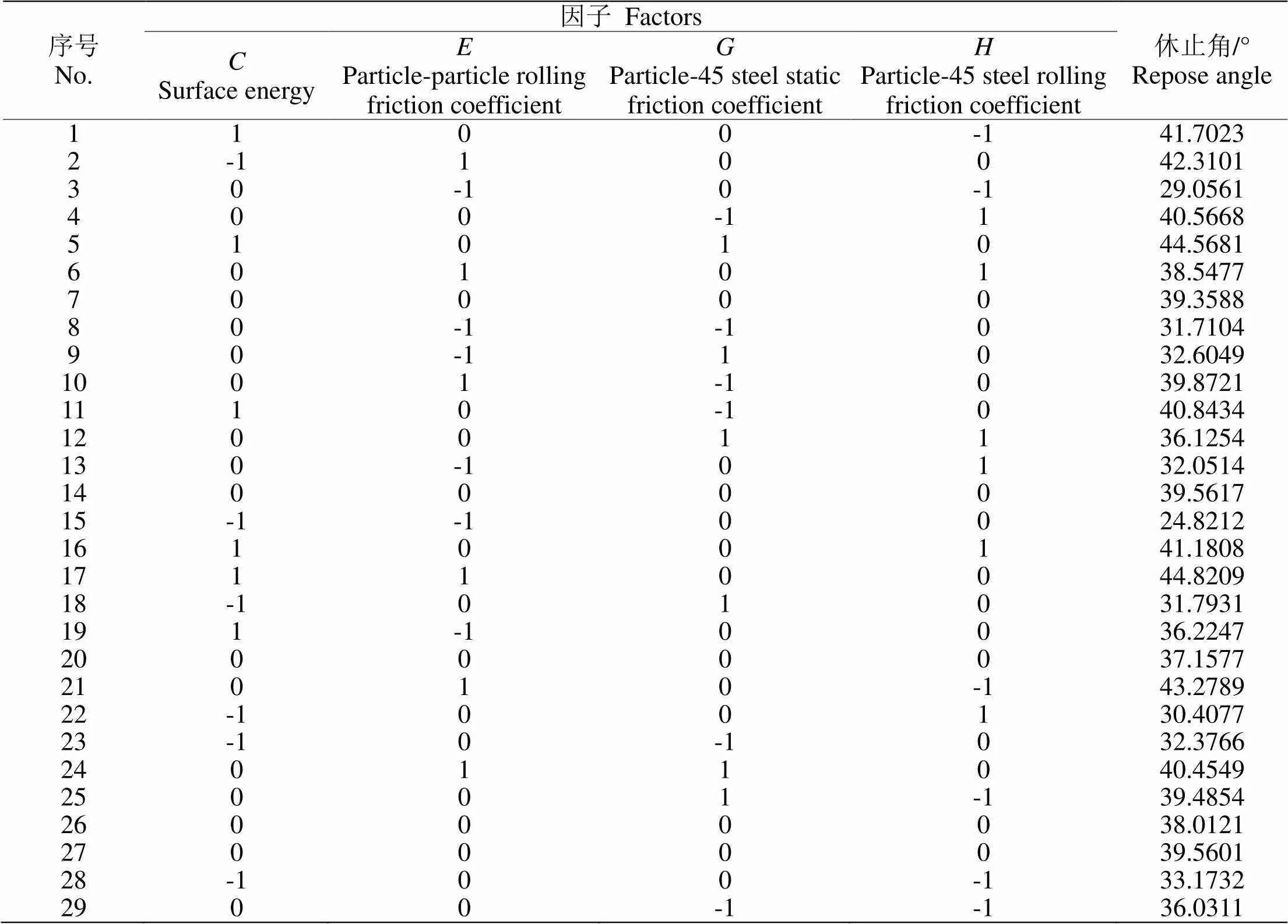
表 9 Box-Behnken试验设计及结果
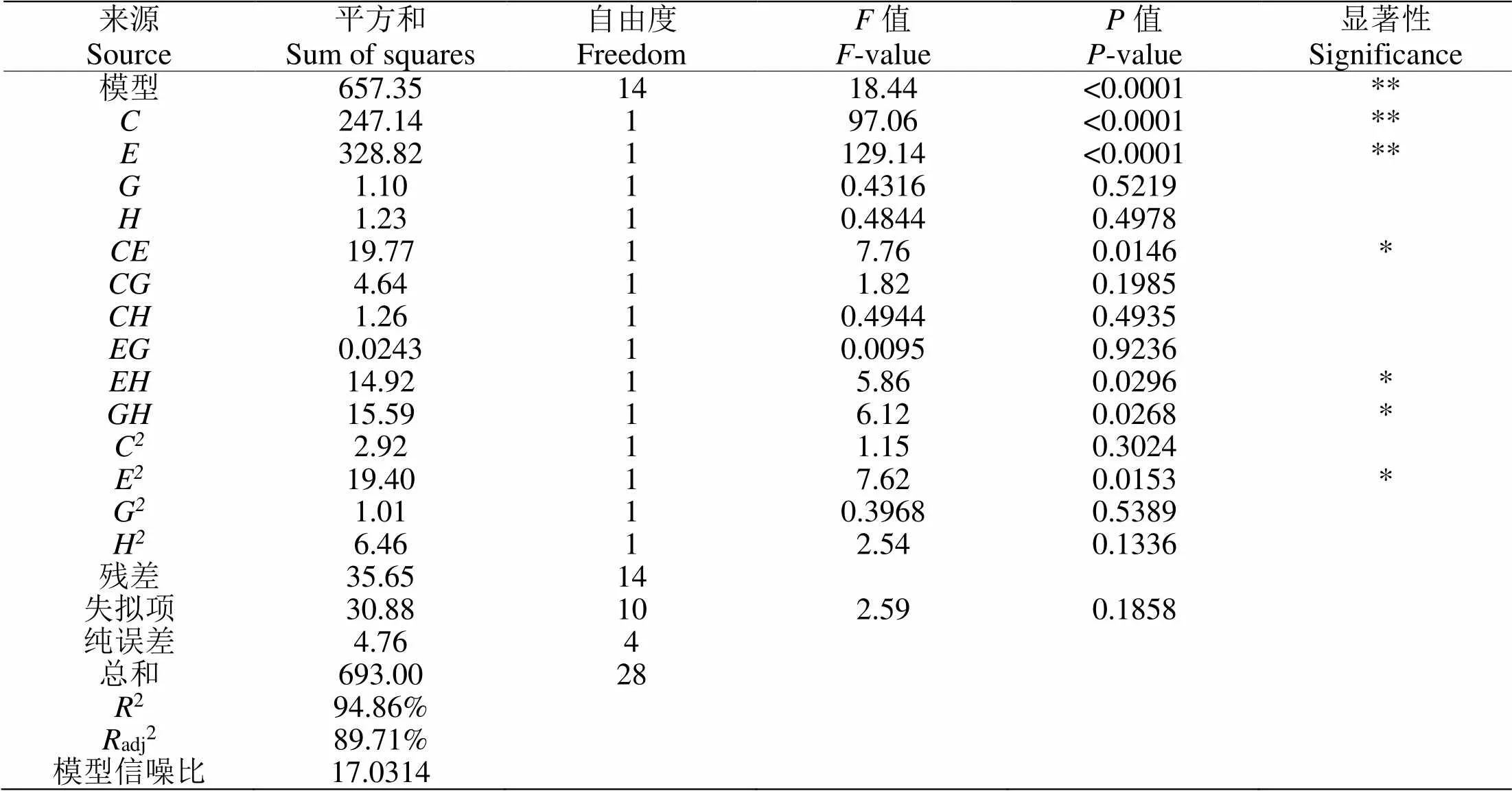
表 10 Box-Behnken试验统计分析
(1)回归分析与方差分析。对表9中的数据进行回归分析,得到各因子关于休止角的多元二次回归方程:=38.73+4.54+5.23+0.3026-0.3206-2.22+1.08+0.56-0.0779-1.93-1.97-0.67092-1.732-0.39462-0.99782(4)
由表10可知,模型的值>1,值<0.0001,表明模型差异性极显著,模型设计合理。失拟项>0.05,说明模型拟合度较好,各因子之间交互性好。(颗粒表面能)、(颗粒-颗粒滚动摩擦系数)表现为极显著(值<0.01),、、、2表现为显著(值<0.05),其他参数表现为不显著。模型决定系数2=94.86%,调整决定系数adj2=89.71%,说明该模型能解释89.71%因子变化,模型拟合度较好。模型信噪比(Adeq Precosion)=17.0314>4,说明模型信号充足,能很好指导预测。
图5为模型的残差正态分布概率图,图中各点分布在直线附近,说明残差呈正态分布。图6为实际值与预测值的关系图,二者相似度很高,说明此模型对实际情况的拟合能力很好。图7残差与预测值的关系图,图中各点在空间内随机分布,表明模型适应性好。
(2)因子交互作用分析。通过Design-Expert软件导出响应面和对应等高线如图8所示,通过响应面图和等高线图分析各因子交互作用及其强弱。

图 6 休止角实际值与预测值
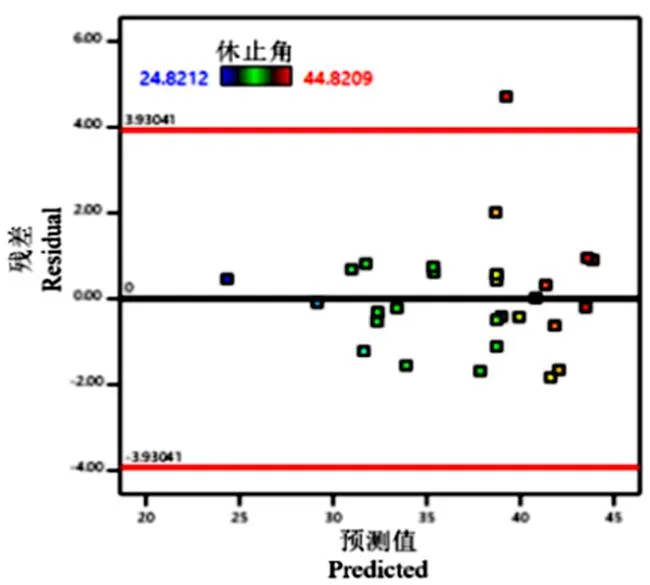
图 7 残差预测图
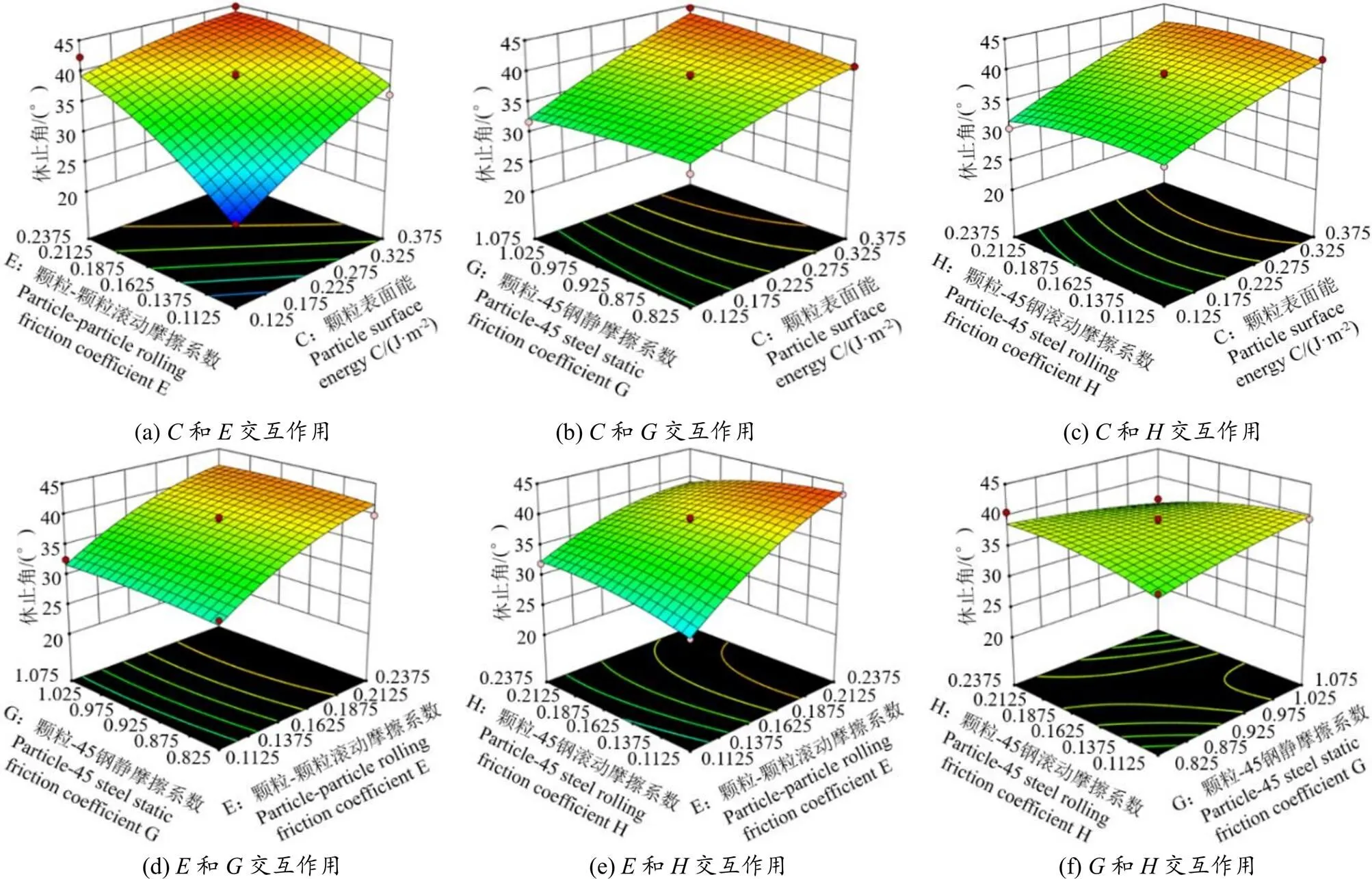
图 8 因子交互作用对休止角影响的响应面图
由各响应面图可以看出,当其他因子保持不变,增加时,休止角呈明显的增加趋势;当其他因子保持不变,增加时,休止角也呈明显的增加趋势;而当其他因子保持不变,或增加时,休止角未见明显增加或减少。这与Plackett-Burman试验结果相符合。
由图8a可知,随着和的增加,响应面先快速增高再缓慢增高,等高线图趋于椭圆形,曲率半径较大,说明二者的交互作用对休止角的影响较为显著。由图8e可知,随着和的增加,响应面逐渐增高且呈凸型,等高线图趋于椭圆,说明二者的交互作用对休止角的影响较显著。由图8f可知,随着和的增加,响应面先缓慢增高后快速降低且整体呈凸型,等高线图趋于椭圆,说明二者的交互作用对休止角的影响较显著。由图8b、图8c、图8d可知,随着和、和、和这三组因子的增加,响应面未见明显凸型,等高线趋于圆形,说明各组的交互作用对休止角的影响均不显著。
3)响应面优化结果及验证。为了使仿真休止角接近实际休止角34.11°,在Design-expert软件中进行参数优化,以休止角()为评价指标,目标及约束条件为:

在Design-expert导出的结果中选优,根据预试验,考虑到表面能偏大会使堆积体母线出现凸型弯曲,与实际堆积体不符,因而从优化结果中选择的最佳参数组为:颗粒表面能0.134 J/m2,颗粒-颗粒滚动摩擦系数0.231,颗粒-45钢静摩擦系数1.045,颗粒-45钢滚动摩擦系数0.228。在该组参数条件下进行多次仿真堆积试验,以验证是否与实际目标休止角相符。
进行4次仿真试验,得休止角平均值为34.8159°,变异系数为3.25%,与目标休止角的相对误差为2.07%,仿真土壤与其中一次实际土壤的堆积效果对比如图9所示。说明仿真土壤与实际土壤的堆积性状一致性较好,模型有效。

图 9 堆积试验结果
3 结论
(1)试验紫色土为壤质砂土,土壤颗粒中粗砾占25.85%,砂粒占73.24%,粉粒和黏粒占0.91%,土壤密度为1650 kg/m3,含水率为10.54%。土壤休止角平均值为34.11°,变异系数为0.452%。颗粒-颗粒静摩擦系数范围为0.5~1,颗粒-45钢静摩擦系数范围为0.7~1.2;
(2)Plackett-Burman试验结果表明,颗粒表面能、颗粒-颗粒滚动摩擦系数对休止角有较显著影响,颗粒-45钢滚动摩擦系数、颗粒-45钢静摩擦系数对休止角有一定影响。其他参数对休止角无显著影响。最陡爬坡试验得到的中心组参数取值为颗粒表面能0.25 J/m2,颗粒-颗粒滚动摩擦系数0.175,颗粒-45钢静摩擦系数0.95,颗粒-45钢滚动摩擦系数0.175;
(3)Box-Behnken试验结果表明,在模型的一次项中,颗粒表面能、颗粒-颗粒滚动摩擦系数对休止角有较显著的影响;在模型的二次项中,颗粒-颗粒滚动摩擦系数、颗粒表面能和颗粒-颗粒滚动摩擦系数交互项、颗粒-颗粒滚动摩擦系数和颗粒-45钢滚动摩擦系数交互项、颗粒-45钢静摩擦系数和颗粒-45钢滚动摩擦系数交互项对休止角有一定的影响。其他项对休止角无显著影响。对于目标休止角34.11°,最优最佳参数组为:颗粒表面能0.134 J/m2,颗粒-颗粒滚动摩擦系数0.231,颗粒-45钢静摩擦系数1.045,颗粒-45钢滚动摩擦系数0.228,其他影响不显著的因子均取中间值,此时仿真休止角与实际休止角相对误差为2.07%,说明标定的紫色土离散元模型准确可靠。
[1] 蒋光毅,曾小英,史东梅,等.南方坡耕地水土保持措施分类及效应评价最小数据集[J].中国水土保持,2021,(10):56-59,5
[2] 丁文斌,蒋光毅,史东梅,等.紫色土坡耕地土壤属性差异对耕层土壤质量的影响[J].生态学报,2017,37(19):6480-6493
[3] 章熙锋,唐家良,高美荣,等.2009-2018年西南典型紫色土丘陵区土壤含水量变化数据集[DB/OL].中国科学数据(中 英文网络版),2020,5(3):242-249
[4] 史东梅,江娜,蒋光毅,等.紫色土坡耕地耕层质量影响因素及其敏感性分析[J].农业工程学报,2020,36(3):135-143
[5] 刘洪斌.重庆市主要土壤类型[R/OL].2017-07-08 [2021-12-3]https://www.docin.com/p-1968921013.html
[6] 钟耕臣,安艳玲.西南丘陵地区玉米机械化收获的现状及发展建议[J].吉林农业,2018(16):32-33
[7] 牛坡,夏飞,尤显平,等.重庆市宜机化土地整治效益研究[J].农业工程,2021,11(8):86-89
[8] 黄晓峰.丘陵山区农业机械化发展存在的问题及建议[J].中国农机监理,2021(6):45-46
[9] 任跃男.丘陵山区宜机化改造助推农机化发展探讨[J].农业技术与装备,2021(8):42-44
[10] 刘聚德.散粒体动力学初探[J].农业机械学报,1997(2):73-77
[11] Cundall PA, Strack OD. A discrete numerical model for granular assemblies [J]. Geotechnique, 1979,29(1):47-65
[12] 王卫华,李夕兵.离散元法及其在岩土工程中的应用综述[J].岩土工程技术,2005(4):177-181
[13] 陈林涛,牟向伟,彭柱菁.离散元法在农业工程中的应用[J].农业工程,2021,11(8):29-34
[14] 于建群,钱立彬,于文静,等.开沟器工作阻力的离散元法仿真分析[J].农业机械学报,2009,40(6):53-57
[15] 李艳洁,林剑辉,徐泳.圆锥指数仪贯入沙土试验的离散元法模拟[J].农业机械学报,2011,42(11):44-48
[16] 杨全文,左树春,徐泳.颗粒离散元法的微机可视化程序设计[J].中国农业大学学报,2002(6):10-15
[17] 曾智伟,马旭,曹秀龙,等.离散元法在农业工程研究中的应用现状和展望[J].农业机械学报,2021,52(4):1-20
[18] 邢洁洁,张锐,吴鹏,等.海南热区砖红壤颗粒离散元仿真模型参数标定[J].农业工程学报,2020,36(5):158-166
[19] Hoshishima C, Ohsaki S, Nakamura H,.Parameter calibration of discrete element method modelling for cohesive and non-spherical particles of powder [J]. Powder Technology, 2021,386:199-208
[20] 王黎明,范盛远,程红胜,等.基于EDEM的猪粪接触参数标定[J].农业工程学报,2020,36(15):95-102
[21] 丁文波,朱继平,陈伟,等.基于EDEM的青稞接触参数仿真标定[J].中国农机化学报,2021,42(9):114-121
[22] 贾富国,韩燕龙,刘扬,等.稻谷颗粒物料堆积角模拟预测方法[J].农业工程学报,2014,30(11):254-260
[23] 夏鹏,李郁,杨公波.散粒物料堆积角离散元仿真研究[J].起重运输机械,2015(2):107-110
[24] 夏蕊,杨兆建,李博,等.基于离散元法的煤散料堆积角试验研究[J].中国粉体技术,2018,24(6):36-42
[25] 韩燕龙,贾富国,唐玉荣,等.颗粒滚动摩擦系数对堆积特性的影响[J].物理学报,2014,63(17):173-179
[26] 贾旭光,陈曦,李鑫.不同粒度和堆载形态下散体瞬时自然安息角的实验研究[J].现代矿业,2015,31(1):25-27,45
[27] Horabik J, Molenda M. Parameters and contact models for DEM simulations of agricultural granular materials:a review [J]. Biosystems Engineering, 2016,147:206-225
[28] DEM Solutions. EDEM 2.5 theory reference guide[R/OL].2014-12-05 [2021-11-7].http://www.docin.com/p-980174717.html
[29] 石志鸣.丘陵山地振动深松作业质量仿真分析与试验[D].重庆:西南大学,2021
[30] 刘坤宇,苏宏杰,李飞宇,等.基于响应曲面法的土壤离散元模型的参数标定研究[J].中国农机化学报,2021,42(9):143-149
Parameter Calibration of Discrete Element Model for Purple Soil on Sloping Farmland in Southwest China
NIE Chen-xu1, YANG Ming-jin1, LI Shou-tai1, YANG Ling1, ZHAO Li-jun1,2,CHEN Xiao-bing3
1.4007152.4021603210014
Soil model is the basis of studying the interaction between soil and soil-touching parts by using discrete element method. To obtain the soil model for discrete element simulation of purple soil on sloping farmland in Southwest China, this study constructed a simulation parameter calibration experiment based on stacking test in combination with some measured test of soil intrinsic parameters. The calibration experiment took repose angle as the response value and Hertz-Mindlin with JKR embedded in EDEM 2020 as contact model. The density, moisture content, repose angle, particle size distribution of soil, the particle-45 steel static friction coefficient and the particle-particle static friction coefficient were measured. The average repose angle of the actual soil was 34.11° and the coefficient of variation was 0.452%. Using Plackett-Burman Design experiment to screen the key factors affecting the repose angle of purple soil, including particle surface energy, particle-particle rolling friction coefficient, particle-45 steel static friction coefficient and particle-45 steel rolling static friction coefficient. The deepest ascent experiment was designed to narrow down their range of values. Box-Behnken Design experiment was used to analyze and optimize the model, and the optimal values of four significant factors were obtained: particle surface energy 0.134 J/m2, particle-particle rolling friction coefficient 0.231, particle-45 steel static friction coefficient 1.045, particle-45 steel rolling friction coefficient 0.228. The verification test showed that the relative error between the simulated repose angle and the measured repose angle was 2.07%, which indicated that the parameters obtained by calibration test was accurate and reliable, which can be used as a reference for the future study of discrete element simulation of purple soil.
Farmland; soil; discrete element model
S152.9
A
1000-2324(2022)03-0454-10
10.3969/j.issn.1000-2324.2022.03.018
2022-03-21
2022-04-11
国家重点研发计划子课题(2017YFD0701101-3);重庆市科技局技术创新与应用发展项目(cstc2019jscx-gksbX0108)
聂晨旭(1998-),男,硕士研究生,专业方向:耕作力学. Email:niechenxu430@126.com
Author for correspondence.Email:ymingjin@swu.edu.cn
