基于空气动力学的手功能康复机器人结构分析与改进*
2022-07-25张治国陶睿志周凡
张治国, 陶睿志, 周凡
(河海大学机电工程学院,常州 213022)
引言
随着老龄化程度的加深,因脑卒中或慢性损伤导致的手功能受损的人数正逐年增加[1-3],手功能损伤临床表现为手部感知缺失及运动失能。手功能损伤将明显降低患者独立生活的能力,影响患者生活[4-5]。大量的临床研究结果表明,通过对患者进行周期性、连续性的被动手部康复训练可以改善患者手部的运动功能,实现肌肉神经的重塑[6-11]。传统治疗手段主要是康复治疗师对患者进行一对一、重复性的康复训练[12],效率低且费用高[13-15]。随着机器人技术的兴起,手功能康复机器人由于能够通过力传递机构带动手指进行指定的重复性动作,为患者提供方便、及时的康复训练,目前已成为手部康复研究及应用的前沿和热点[16]。
依据不同的材质与触感,手功能康复机器人大致可分为刚性与柔性两种。临床研究表明,刚性手套虽然可以提供足够的抓握力,且易于控制,但其会过度抑制佩戴者的手部活动,治疗中的错误操作将造成患者手部的二次损伤。此外,刚性手套重量较大、费用高,且不具有便携性[16-22]。因此,近年来柔性手康复机器人凭借其价格优势和便携性深受患者青睐[23-25]。其中,以波纹管为驱动装置的气动式手康复机器人为目前市场上的主流产品。然而研究表明,气动式柔性手套训练力度不足、控制准确性差[26]。为此,本研究以羿生SY-HRO1C经典款柔性手功能康复机器人为研究对象,通过流固耦合方法对该产品的气流通路进行分析,探究造成该类产品训练力度不足和运动准确性差的原因,并提出了改进方案,以期通过本研究为现有气动式手功能康复机器人的改进提供新的参考。
1 材料与方法
1.1 几何模型的重建与网格划分
本研究首先根据现有的经典款手功能康复机器人产品,运用Solidworks 19.0进行T型气流通路结构与流场的三维数值模型的重建,见图1。在Ansys中进行网格划分,其中,流场采用非结构化四面体网格进行网格划分,网格单元数量为688 501;通路结构采用solid187网格类型进行网格划分,单元数量为271 882。本研究模型设计的材料属性,见表1。
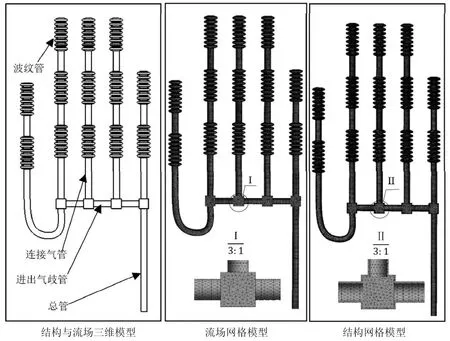
图1 T型式气流通路的三维数值模型与网格模型Fig.1 The 3D numerical model and mesh model of T-shaped flow field

表1 材料属性Table 1 Material properties of structure
1.2 控制方程
手功能康复机器人气流通路流固耦合过程中要求流场与结构的位移、应力、热流量、温度等变量数值相等,因此,守恒方程可以表达为:
(1)
其中τ为应力,d为位移,q为热流量,T为温度,f表示流场,s表示结构。
1.3 边界条件及求解
本研究首先设置流场部分求解器为压力基求解器,出口为质量流量出口,其数值大小通过实验测定质量流量为2.45 kg/(m2·s),计算采用k-ω湍流模型和SIMPLE算法。气流通路的壁面采用无滑移壁面,并采用局部重构法和弹性光顺法来实现动网格更新,并设置流场与连接气管、波纹管接触面为流固耦合面,时间步数为130,时间步长为1 ms,最大迭代次数为20次。随后设置外部气流通路连接气管、波纹管内壁为流固耦合面,并仅允许外壁、波纹管和连接气管沿竖直方向移动。最后设置耦合:建立流场与结构之间的数据传递,设置总时间步长为130 ms。
2 结果
2.1 T型式气流通路的空气动力学分析
抽气130 ms时,手功能康复机器人气流通路内,越靠近抽气口,真空度越高(真空度等于大气压强与气流通路内压强之差),见图2。其中,在各手指支路中,靠近抽气口的小指支路内真空度最高,约为11 480 Pa,拇指和食指内真空度较小。因此,在抽气过程中,拇指的指部训练力度低于小指的训练力度,然而在实际生活中,无论是两指的掐取、三指的捏取以及五指抓握均需要拇指的参与,并且在抓握过程中拇指与食指需要的抓握力最大,占总抓握力的75%左右,小指仅需要4%,因此,拇指与食指附近肌肉需要更高强度的训练,原T型气流通路抽气口布局不符合手功能康复训练的需求。
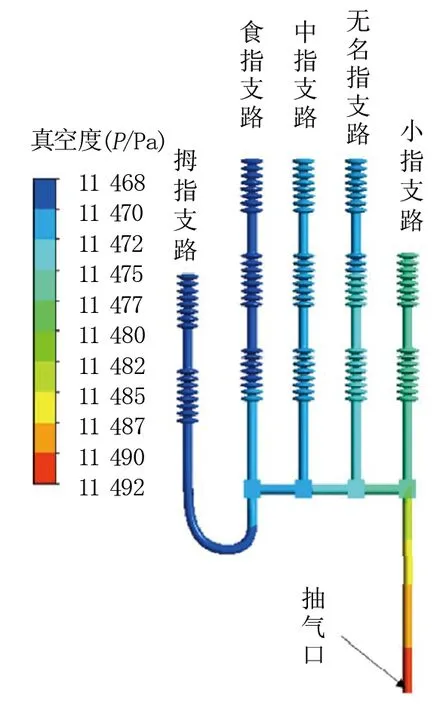
图2 T型气流通路的压力图Fig.2 Pressure contour of T-shaped flow field
手功能康复机器人抽气130 ms时气流通路的流线图,见图3。越接近抽气口,进出气歧管内的流速越大。在食指支路与歧管的连接处,歧管气流速度小于0.99 m/s,在小指支路与歧管的连接处气流速度达到2.98 m/s,为食指支路与歧管的连接处气流速度的近3倍。同时,在每个手指支路与进出气歧管的连接处流线紊乱,越靠近气歧管出口紊乱现象越严重。
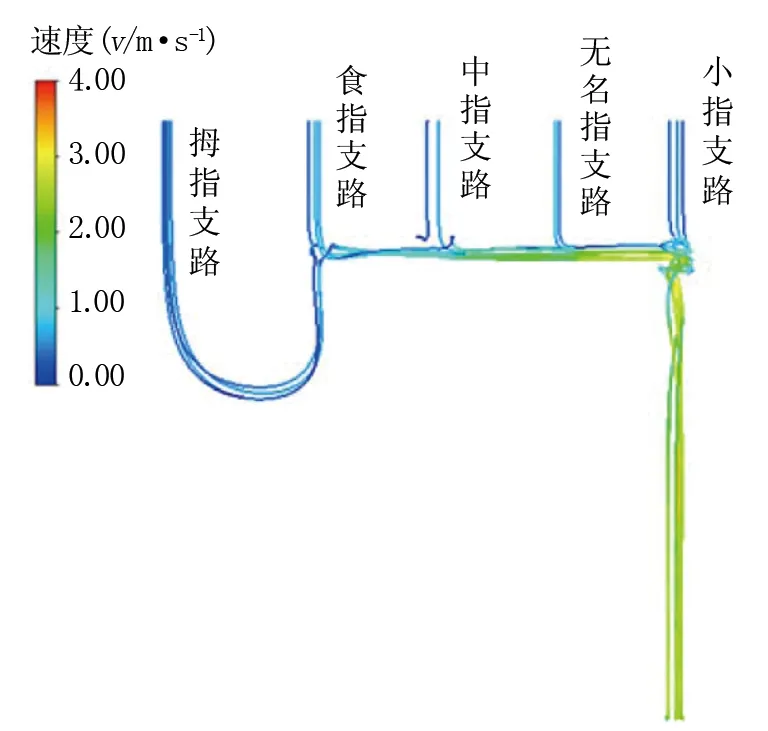
图3 T型气流通路的速度流线图Fig.3 Velocity streamline of T-shaped flow field
图4列出了各手指支路与进出气歧管连接处截面的局部速度矢量图,其中,拇指与食指共用一个歧管,其余支路各一个歧管。由图可知,各个手指支路与进出气歧管的连接处存在明显的气体涡旋,且气流的运动方向紊乱,进而导致气体不能快速排出,影响气流通路抽气效率。
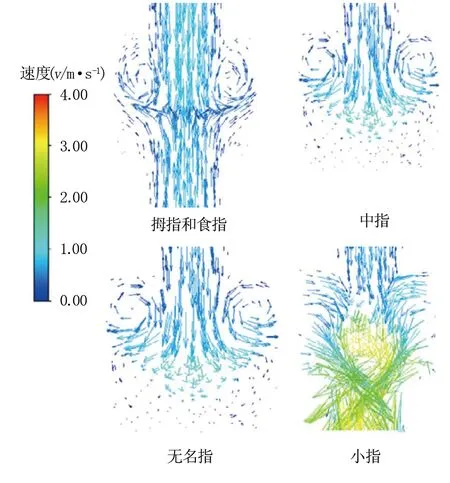
图4 各支路速度矢量图Fig.4 Velocity vector diagram of each branch
2.2 气流通路的改进设计
基于上述计算结果,为提高气流通路的抽气效率,提升手功能康复机器人对指部的训练力度,本研究提出了平移T型、渐缩T型、鸭嘴T型以及渐缩直型四款改进型气流通路(见图5)。
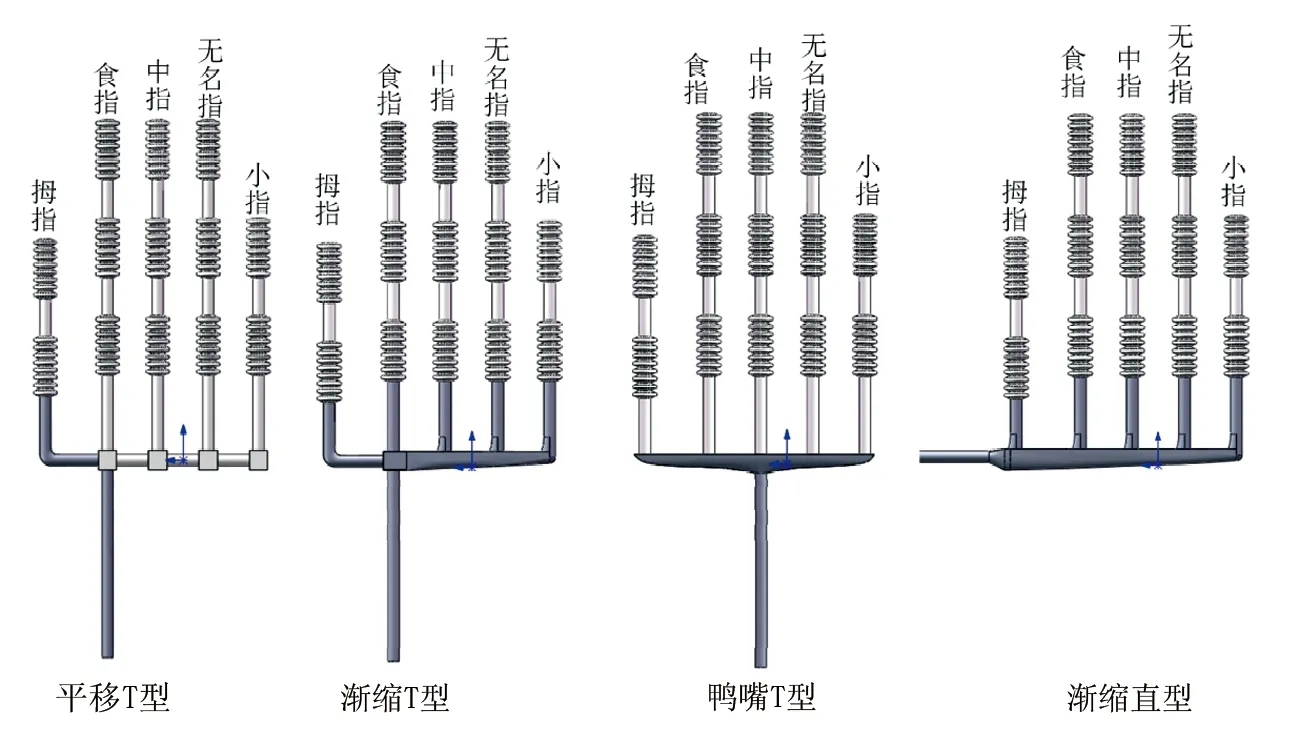
图5 改进型气流通路Fig.5 Improved flow field
四款改进型气流通路内的压力见图6,鸭嘴T型气流通路内的真空度分布更加均匀。平移T型、渐缩T型以及渐缩直型气流通路内的真空度从小指到拇指支路依次增强。
图7为改进后气流通路内的流场图。其中,渐缩T型、鸭嘴T型以及渐缩直型气流通路进出气歧管处未产生较大的速度差,且无流线紊乱的现象。平移T型气流通路从各手指支路流出的气流与歧管中的气流存在速度差,在出气口附近产生了流线紊乱,但相比于原T型气流通路无明显涡旋的产生(见图8),气流得以顺畅地排出。
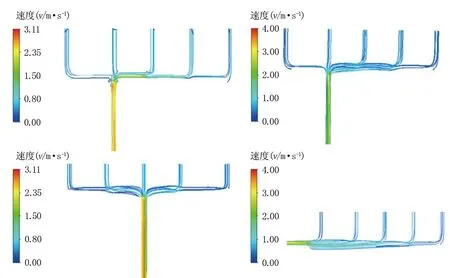
图7 改进型气流通路流线图Fig.7 Streamline diagram of improved flow field
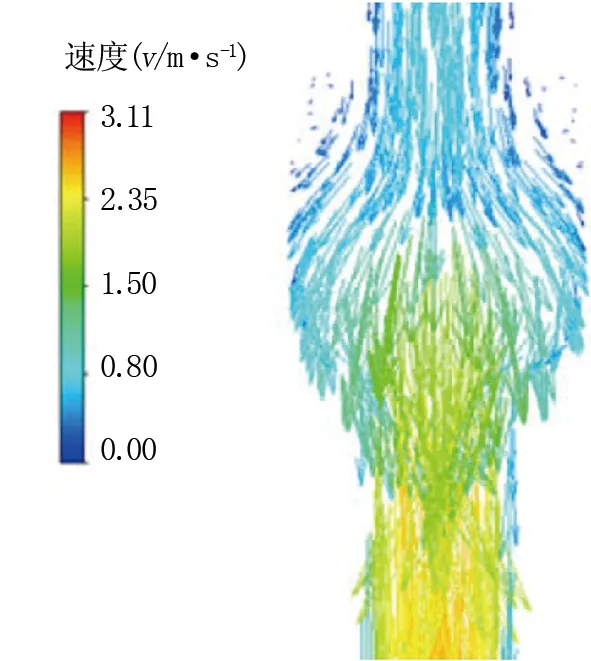
图8 局部速度矢量图Fig.8 Local velocity vector diagram
不同结构的气流通路在抽气至130 ms时,内部真空度对比分析图,见图9。由于气流通路内的真空度分布不均,因此,本研究分别选取了不同气流通路内相同位置(见表2)的临近节点进行真空度检测,然后取其平均值,其中,位置1为拇指支管第一个波纹管中部,用于观测拇指气流通路的真空度;位置为2为食指支管第二个波纹管中部,用于观测食指气流通路的真空度;位置3为中指支管第二个波纹管中部,用于观测中指气流通路的真空度;位置4为无名指支管第二个波纹管中部,用于观测无名指气流通路的真空度。小指在各气流通路中的变化较小,因此未设参考点。管内的真空度越高,其在康复训练时能辅助患手进行伸展的力度越大。由图9可知,渐缩T型气流通路对于指部训练力度的提升幅度最高,平均真空度数值达到11 769 Pa;其次是平移T型气流通路,管内平均真空度约为11 643 Pa,比原T型气流通路高174 Pa;鸭嘴T型气流通路改进效果不明显,管内平均真空度仅提高48 Pa。
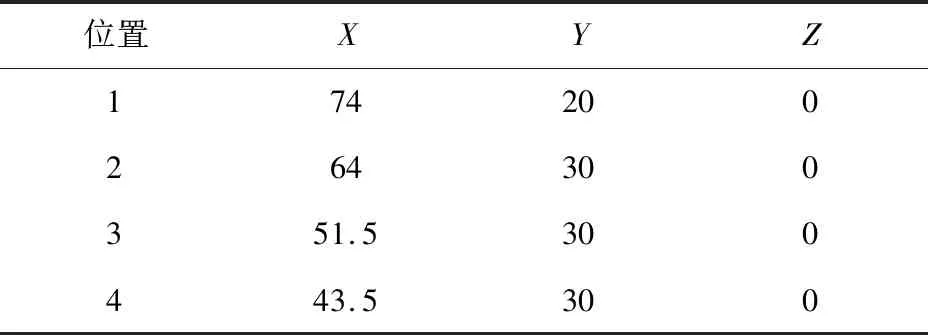
表2 参考点位置表Table 2 Location of reference points 单位:mm
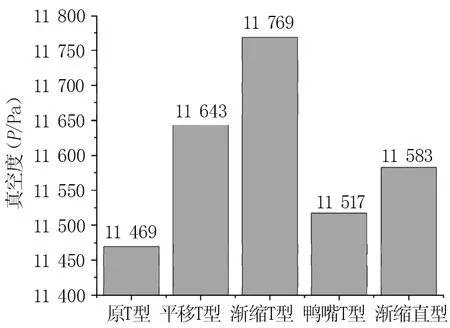
图9 130 ms时刻不同气流通路内的真空度Fig.9 The vacuum degree in different flow fields at 130 ms
3 结论
本研究重建了手功能康复机器人气流通路的三维模型,并基于流固耦合原理展开一系列的改进设计和分析。计算结果表明:越靠近抽气口,手指支路内的真空度越高,指部训练力度也就越大。原T型气流通路抽气口分布不合理,导致在各手指支管与歧管的连接处出现了紊流和大量涡旋,这表示部分气体未被迅速抽出,影响支路内真空度的提升效率,进而影响其控制效率,并且小指的训练力度均高于拇指与食指,因此原T型不符合手康复训练的需求,且难以实现高效控制。改进后气流通路内的流场更加平稳,相比于原T型气流通路无明显涡旋的产生;其中渐缩T型气流通路的抽气效率最高,管内真空度比原T型提高近300 Pa,手指训练力度显著增强,并且高效的抽气有助于手套及时做出反应,提高可控性。
综上所述,本研究通过基于流固耦合的计算空气动力学仿真,深入探究了现有气动式手功能康复机器人气流通路的设计不合理问题,并提出了有效的改进方案。本研究为气动式手功能康复机器人气流通路的改进设计提供了重要的理论指导。
