基于边缘检测的雷达图像船岸分离方法
2022-07-25田国昊初秀民
田国昊,石 磊,刘 轰,初秀民
(1.武汉理工大学 智能交通系统研究中心,湖北 武汉 430063;2.中设设计集团股份有限公司,江苏 南京 210014;3.闽江学院,福建 福州 350000)
我国拥有较长的海岸线及内河航道,航行安全监管的需求越来越大。现今,我国沿海和长江干线已建成50余个船舶交通服务(VTS)中心,沿海重要水域及港口基本实现了全面覆盖,长江干线航段基本实现全方位安全监管[1]。雷达是VTS系统中不可缺少的组成部分,通过雷达可探查到水域中的船舶航行状况,帮助海事人员了解水上综合情况。雷达目标识别是雷达应用的关键技术,而目标识别对于雷达图像而言具有一定的要求。现今雷达成像技术已经相对成熟,要提高目标识别准确率就需要针对不同应用场景对雷达图像进行处理。针对道路识别场景,文献[2]通过对图像纹理进行提取并修复规避图像上出现不完整道路情况的发生;针对机场跑道场景,文献[3]提出了一种机场跑道异物检测方法,利用高斯模型叠加去除噪声,运用背差法去除背景,再通过形态学处理增强图片,最后运用漫水填充法得到雷达图形中的目标。以上研究都是通过对雷达图像进行处理进而检测其目标,对特定的检测环境具有较高的目标识别率。
长江的狭窄水域中地形相对复杂,航道狭窄、弯曲,岸线较长。船舶靠岸行驶时,船舶与岸线图像融为一体,无法分离,给雷达目标捕获、识别带来困难。文献[4]提出一种应用于狭窄水道的雷达图像处理技术,可获取位于航道上的船舶图像,然而此技术是基于切除大量岸线回波基础上的,因此针对雷达图像上近岸船舶并不能做到识别。为识别近岸船舶,文献[5]又提出了一种基于图像处理的内河海事雷达图像岸线桥梁提取方法,利用提取桥梁和岸线的方法对船舶进行识别。然而因岸线桥梁形状复杂导致其提取难度高,且岸线桥梁图像面积远大于目标船舶图像面积,去除岸线桥梁时容易丢失近岸船舶目标。
针对上述已有方法存在的问题,本文提出了一种基于图像处理的雷达图像船岸分离方法,通过混合高斯背景建模获得背景图形,对目标图像进行形态学处理及边缘检测,最后通过背差法获得目标船舶,从而进行船岸分离。此方法有利于提高雷达目标识别成功率,减少近岸船舶无法识别情况的发生,提高海事监管水平,保障船舶航行安全。
1 近岸船舶分离处理方法
近岸船舶分离方法包括灰度图转化、混合高斯模型检测运动目标、数学形态学处理、边缘检测等步骤。首先,通过多张雷达图像进行混合高斯背景建模,获取背景图;其次,对当前雷达图像进行灰度转化,获取灰度图;再次,将灰度图与背景图进行背差操作,获得目标船舶图像,对船舶图像进行数学形态学处理并通过边缘检测算法获取船舶轮廓;最后,船舶轮廓图与当前帧图间进行图像运算操作获取船岸分离图像。雷达图像处理方案如图1所示。

图1 雷达图像处理方案
1)灰度图转化。此操作将图像颜色空间从红绿蓝(RGB)三通道值转为单通道灰度值表示,可减少图像处理运算量,提高运算效率。本文灰度图转化操作增强图像中强信号的主体部分,削弱因水波等原因产生的弱信号部分。
2)混合高斯背景建模。因所采集的雷达图像是在固定地点不同时间线上采集的,雷达图像中背景虽稍有浮动却大体不变,本文采用在背差操作中效果良好的混合高斯背景建模。
3)背差操作及背景图更新。背差操作可将当前帧图像与背景图像进行比较,以获取两图间像素值差距较大区域。此时的当前帧图将与原背景图集继续以累积求均值的方法获得新背景图。
4)数学形态学处理与边缘检测。数学形态学处理的基础为腐蚀与膨胀,腐蚀去除近岸船舶图像中的多余杂点,膨胀使目标船舶图像调整至适当大小,形态学处理效果图如图2所示。边缘检测操作采用改进的Canny边缘检测,可获得图像中物体边缘轮廓以进行图像运算操作。

图2 形态学处理效果图
2 关键技术分析
针对近岸船舶图像处理中的关键技术进行分析,分别从灰度图转化、混合高斯背景建模、改进的边缘检测、目标分离这几方面表述。
2.1 灰度图转化
为减少图像处理运算量,突出图像主体部分,需对雷达图像进行灰度转化。为减弱信号对雷达扫描图像的影响,本文对灰度图转化公式进行了改进,常规的灰度图像转化方法有最大值法、平均值法、加权平均值法,加权平均值法可通过给予RGB不同的权值,进而凸显出图像主体部分。加权平均值法数学计算如公式(1)所示。
X=a×CR+b×CG+c×CB,
(1)
式中,X表示转化后的像素点像素值,CR(红色)、CG(绿色)、CB(蓝色)为三通道像素值,a、b、c分别为RGB加权数值(通过经验获取,a=0.7、b=0.2、c=0.1)。
2.2 混合高斯背景建模获取目标船舶
简单目标检测的基本方法有帧差法和背差法。帧差法是将当前帧图像与相邻帧图像相减做差,而背差法与帧差法不同,将当前帧图像与一个背景模型相减,在差分图像中提取运动目标。背差法可通过使用大量的雷达图像计算获取背景模型,消除了帧差法因目标船舶移动缓慢而无法识别的缺点。
背差法中最重要的是背景建模,建模方法有平均值法、混合高斯背景建模等。背景建模效果图见图3。如图3(a)所示,平均值法所得背景图模糊阴影部分较多,将给目标检测带来误差;如图3(b)所示,混合高斯背景建模所得背景图模糊阴影较少,且边缘清晰,效果良好,因此本文选用此算法。
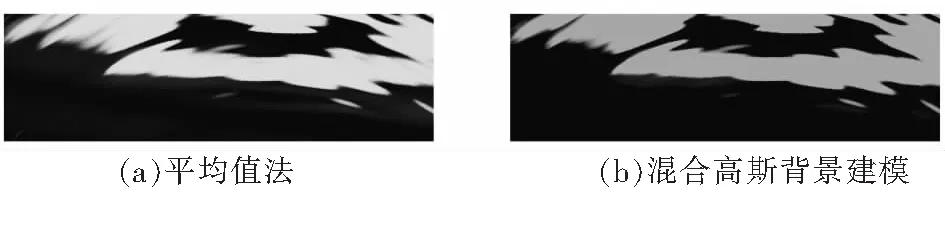
图3 背景建模效果图
获得背景图像后,可将背景图与当前图像做差值计算,得出目标船舶图像,背差法效果图如图4所示,其计算如公式(2)所示:

,(2)
式中,F(x,y)表示差分图,I(x,y)表示当前帧图,B(x,y)表示背景图,T为设置阈值。

图4 背差法效果图
2.3 边缘检测算子比较
本文采用几种通用的图像边缘检测算子进行对比,如索贝尔(Sobel)边缘检测、拉普拉斯(Laplacian)边缘检测以及坎尼(Canny)边缘检测[6],最终采用了经改进的Canny边缘检测。4种边缘检测算子效果图见图5。Sobel边缘检测时,其边缘部分连接效果较差,出现了一些虚假边缘,并且边缘检测线较宽,虽然其定位精确,但抗噪能力较差,应用效果并不理想,见图5(a)。Laplacian边缘检测会使边缘细节丢失,因使用前会使用高斯滤波平滑图像,虽减少了噪声的干扰,但同时会使边缘尖锐部分也被平滑掉,致使边缘细节丢失,见图5(b)。Canny算子的使用效果整体而言相对较好,其不仅抗干扰能力强,而且可以利用其双阈值的划分将图形真边缘和伪边缘进行区分,边缘检测线也相对较细[7]。但因高斯滤波对图像边缘也进行模糊,导致部分边缘细节丢失,见图5(c)。针对此问题,本文采用保持边缘的双边滤波代替高斯滤波,双边滤波Canny检测效果较好,边缘并未出现缺失现象,因此本文选用此算法[8],见图5(d)。
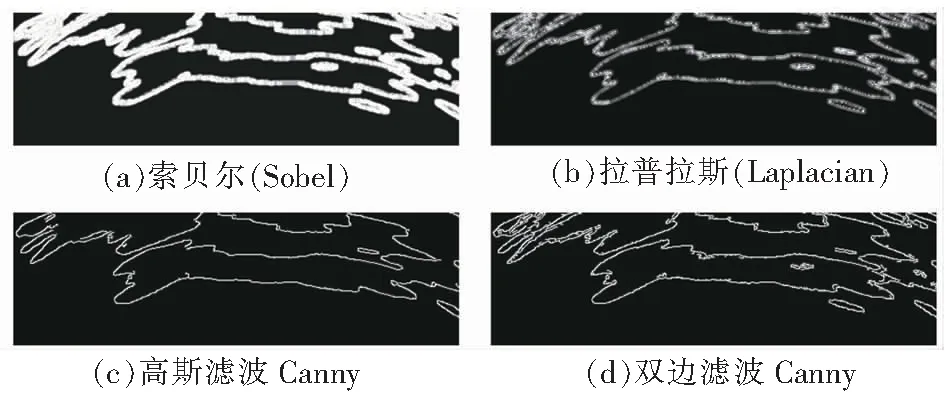
图5 4种边缘检测算子效果图
本文Canny边缘检测的步骤如下。
1)双边滤波平滑图像,双边滤波同时考虑像素点的空间域信息与值域信息。在进行边缘模糊时,面对检测点邻域像素值相差较大的情况,会减低模糊的权重,避免边缘被模糊。双边滤波后像素点m(x,y)为:
(3)
w(i,j)=ws(i,j)×wr(i,j),
(4)
(5)
wr(i,j)=
(6)
式中,m(x,y)为模糊后像素点,x、y分别代表像素点横纵坐标轴,m(i,j)为邻域像素点,i、j分别代表邻域像素点横纵坐标轴,S为检测点邻域,w(i,j)为滤波权重,ws(i,j)为空间域滤波权重,wr(i,j)为值域滤波权重,δs为空间域标准差,δr为值域标准差。
2)计算梯度幅值和方向,用以筛选边缘点,首先设定2个3×3卷积核Kx与Ky:
利用卷积核计算幅值和方向,其公式如下:
Gx=Kx*m(x,y),
(7)
Gy=Ky*m(x,y),
(8)
(9)
(10)
式中,Kx、Ky分别为x与y方向上的卷积核,Gx和Gy分别为Kx、Ky与图像上各点卷积后得到的卷积值,G为幅值,θ为方向。
3)运用非极值抑制的方法去除非边缘像素,保留一些细小的线条,然后利用其双阈值限制去除虚假边缘。非极大值抑制则可以帮助将局部最大值之外的所有梯度值抑制为0,对梯度图像中每个像素进行非极大值抑制的算法是:①将当前像素的梯度强度与沿正负梯度方向上的2个像素进行比较。② 如果当前像素的梯度强度与另外2个像素相比最大,则该像素点保留为边缘点,否则该像素点将被抑制。
本文Canny算子边缘检测的优势在于可通过双阈值对明显边缘与非明显边缘进行划分,并且自动判定明显与非明显边缘相连,才将弱边缘包含于图像之中。且采用保持边缘的双边滤波,较好地保存了边缘细节。采用此方法进行检测不容易丢失虚弱边缘的信息,因此该方法容易检测出真正的弱边缘,且具有较强的抑制噪声能力。
2.4 目标分离
由数学看来,灰度图可视为由像素点组成的矩阵,由此可将图像按数学运算的方法进行计算,使图像更加精准。本文船岸分离方法将轮廓图像取“非”,并将非运算图像与原图像取“或”,可获得最终的船岸分离图像。
船岸目标图像分离是基于轮廓图与原图像进行计算的基础上。其计算如下:
(11)
3 试验结果
3.1 试验场景
长江航道属于内河航道,其航道情况复杂,雷达图像中目标船舶与岸线融合的情况时有发生,适用于本方法。本文采用某公司提供的4G固态雷达,并选取武汉白沙洲航段进行试验。
3.2 试验步骤
本文提供船岸分离方法,为减少冗余操作,雷达图像保留有效区域,即岸线与河道相交汇的区域。背景图为将多张背景图进行混合高斯建模操作后所得,经阈值限制保留背景图,去除前景图像。对比背景图与当前图,在当前图中岸线部分有明显的船岸融合图像,使目标船舶难以辨认。当前图与背景图经背差操作得到背差图,背差图中包含船舶图像以及大量边缘杂点。腐蚀图中,使用7×7卷积核进行腐蚀操作,消除边缘杂点,船舶图像相对缩小;膨胀图中,采用相同结构体使船舶图像恢复适当大小;轮廓图中,采用Canny边缘检测并进行膨胀操作,Canny边缘检测保证船舶轮廓完整,膨胀操作使轮廓明显易于观察。最后将目标轮廓与当前图进行分离操作即可得到船岸分离图像。
3.3 试验结果分析
经试验,取不同时段雷达扫描图像进行船岸分离操作,船岸分离准确率如表1所示,船岸分离准确率已由原来的50%左右达到80%以上。不同时刻的雷达扫描图像,运用本文方法皆可将船岸图像分离,且船舶大小、船舶位置对船岸分离效果皆无影响,船岸分离图像中可明显辨认出近岸船舶。与当前图及背景图对比,可发现没有误将岸线分离的情况发生,船岸分离效果良好。图6为船岸分离图像与原图对比。

图6 船岸分离图像与原图对比
通过本文研究方法进行船岸分离,可使近岸船舶易于识别,减少近岸后丢失船舶数据情况的发生。雷达可使使用者直观的观测到海域中的航行情况,船岸分离后的图像突出了近岸船舶,具有易于观察的特点,增加了船舶识别准确度,为海事监管安全进一步提供了保障。
4 结束语
本文基于图像处理技术提出了一种雷达扫描图船岸分离方法。在近岸处船舶与岸线相干扰的情况下,该方法运用混合高斯模型检测运动目标、数学形态学运算、边缘检测等技术将雷达图像上的目标船舶与岸线进行分离。本方法可提高雷达目标识别成功率,减少近岸船舶无法识别情况的发生,提高海事监管水平,保障船舶航行安全。
本文对海事雷达图像进行研究,并取得了一定的研究成果。但在实际应用方面还有许多不足。①本文采用背差法,当背景图像出现误差时,差分效果不佳将影响船岸分离的准确性。雷达背景图像的获取方法有较大的改进空间,这对提升雷达目标识别率具有重要意义。②本文在进行灰度转换和边缘提取等操作时,使用了一些经验参数作为判断阈值,经验参数无法自适应更新。在后续研究中,可对图像处理阈值自适应选取方向进行研究。