基于嵌套网格技术对控制动作下水下拖曳系统水动力特性的分析
2022-07-25杨显原吴家鸣
杨显原,吴家鸣
(华南理工大学土木与交通学院,广州 510640)
0 引 言
水下拖曳系统是一种广泛应用于水下物理化学环境参数监测的移动式观测平台,水面操作人员可通过拖曳电缆实时发出的控制信号对姿态控制水翼、导管螺旋桨等控制机构进行控制从而实现对水下拖曳体轨迹和姿态的动态控制。准确地预报控制动作下水下拖曳系统的水动力特性,把握控制动作与水下拖曳系统运动形态之间的规律,对水下拖曳系统的设计和使用具有重要的参考价值。
近年来,研究人员对带缆水下潜器的水动力特性开展了许多有益的研究和探索。Fang等[1]建立了考虑脐带缆影响因素的水下潜器六自由度运动水动力模型,采用四阶Runge-Kutta数值方法求解了脐带缆影响下水下潜器的运动方程与脐带缆的形态,并与无脐带缆影响的运动方程数值结果进行对比,其研究结果表明脐带缆对水下潜器的运动特征有不可忽略的显著影响;Sun 等[2]采用节点位置有限元法对脐带缆进行了建模,分析了水下拖曳系统的非线性动力特性,他们所推导的节点位置有限元法消除了现有非线性有限元方法中刚体运动与总运动解耦的必要性以及各时间步内求解小角度旋转时的局限性;吴家鸣等[3-5]以脐带缆的控制方程为核心提出了带缆水下机器人系统的水动力与控制模型,该模型中脐带缆的控制方程基于有限差分法,水下机器人的水动力特性由潜艇的六自由度运动方程描述,水下机器人周围的流体运动则利用计算流体力学(CFD)方法对Navier-Stokes 方程单独进行求解得到;张大朋等[6]建立了水下拖曳体拖航回转和自航回转两种模式下的动力学仿真模型,研究了不同参数对水下拖体的影响,但该方法无法真实反映导管桨和控制水翼等控制机构控制力与水下拖曳体运动之间复杂的耦合关系,对水下拖曳体拖航过程中复杂的粘性干扰效应也难以计及。
尽管研究人员对水下潜器系统缆绳的求解和水下潜器运动控制仿真等诸多方面进行了许多有益的研究和探索,但现有研究中,通常是将缆绳力、控制机构控制力与水下潜器主体运动等割裂开来单独求解而忽略相互之间的耦合关系。对于水下拖曳系统,目前的研究对考虑粘性作用下系统整体的水动力特性,尤其是控制机构控制动作耦合下的整体水动力理论与数值分析探讨尚不充分,这在很大程度上直接影响到我们对控制机构的控制动作与水下拖曳系统的水动力特征之间复杂关联关系的正确理解与认识。
为了准确地预报控制动作下水下拖曳系统的水动力特性、把握控制动作与水下拖曳系统运动形态之间的力学规律、弥补目前控制机构控制动作下水下拖曳系统在水动力特性研究方面的不足,本文在前人研究的基础上采用计算流体力学方法对匀速拖曳工况中不同控制动作下的水下拖曳系统进行了数值模拟,观察与分析控制机构的控制力特性与水下拖曳系统水动力特性以及二者之间的关系。文中将水下拖曳系统的控制机构动作、拖曳缆绳以及拖曳体主体在一个统一的理论框架下进行求解,以避免传统方法中控制机构控制动作与水下拖曳系统割裂求解、忽略它们之间相互耦合作用而带来的求解缺陷。本研究所采用的分析方法中,拖曳缆绳通过准稳态的悬链线形状参数方程描述,控制动作下控制机构的控制力以及控制机构与拖曳体主体的水动力载荷通过求解N-S方程得到。通过对水下拖曳整体系统数值计算结果的分析,归纳出控制机构控制动作下拖曳系统的水动力基本特性。
1 数学模型与数值方法
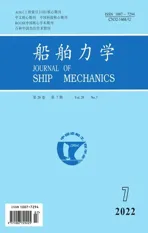
图1给出了文中所研究的水下拖曳系统的整体概貌,拖曳系统由拖曳缆绳与可控制水下拖曳体两部分组成,拖曳系统在拖曳方向的整体向前运动所需的拖曳力由拖曳母船提供。拖曳体由主腔体、主控制水翼、水平与垂直稳定尾翼以及一对用于控制拖曳体转艏运动的导管螺旋桨组成。

图1 水下拖曳系统示意图Fig.1 Sketch of the underwater towed system
1.1 控制方程
文中采用有限体积法离散控制方程。流场的控制方程[7]为
(1)连续性方程

(2)动量方程

1.2 Schnerr-Sauer空化模型
文中采用Schnerr-sauer空化模型处理螺旋桨空化过程[8-9]。空化流动的连续性方程为

式中,ρv为蒸气密度,a为蒸汽体积分数,pv为饱和蒸汽压,Re为考虑蒸发的源项,Rc为考虑凝结的源项。

式中,ρl为液体密度,ρm为混合流体密度,RB为空泡半径,pv为饱和蒸汽压。
1.3 水下拖曳体运动方程
水下拖曳体的运动是在缆绳拖曳力、流体力以及回复力(重力与浮力的合力)耦合作用下的复杂六自由度刚体运动。根据牛顿第二定律,全局惯性坐标系下水下拖曳体的六自由度空间运动方程可以表述为

式中:m为拖曳体质量,v为拖曳体线速度,t为物理时间,ps为流体作用在拖曳体面单元s上的法向力,as为面单元s的面积向量,τs为流体作用在面单元s上的剪向力,g为当地重力加速度,Ft为缆绳拖曳力,ω为拖曳体角速度,rs为面单元s形心到拖曳体重心的距离向量,rt为缆绳拖曳点到拖曳体重心的距离向量,M为拖曳体转动惯量:

1.4 拖曳缆绳耦合模型
忽略流体力对小直径光纤传输拖曳缆绳的直接作用,准稳态的弹性拖曳缆绳形状参数方程[10]为

式中,m0为单位长度拖曳缆绳质量,k为拖曳缆绳刚度,Lr为拖曳缆绳松弛长度,α、β为与拖曳缆绳两端位置以及拖曳缆绳总质量相关的积分常数,曲线参数λ与拖曳缆绳上该点的切向角φ有关:

如图2 所示,O0-X0Y0Z0为全局惯性坐标系,O1-X1Y1Z1为拖曳母船运动坐标系,O2-X2Y2Z2为拖曳体运动坐标系,O-xyz为位置与拖曳体初始时刻的拖曳体运动坐标系O2-X2Y2Z2重合并随拖曳母船向前运动的拖曳体半固定坐标系。Ps为在拖曳母船运动坐标系O1-X1Y1Z1下定义的拖曳缆绳上端点,Pt为在拖曳体运动坐标系O2-X2Y2Z2下定义的拖曳缆绳下端点,即拖曳缆绳的两端分别为Ps、Pt点,则拖曳母船和拖曳体无相对运动时拖曳缆绳两端点Ps、Pt处的作用力Fs、Ft分别为
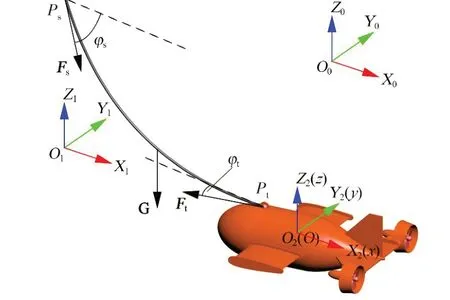
图2 准稳态拖曳缆绳耦合模型Fig.2 Coupling model of quasi-steady towing cable

1.5 几何模型
选取本课题组正在研发的一种可控制水下拖曳系统作为本文研究对象,拖曳系统的主要参数如表1 所示。图3 为系统中拖曳体的三维示意图。如图所示,拖曳体主腔体为Myring 型回转体,主腔体中部设置了一对横向对称布置在主腔体左右两侧的共轴NACA 0010型翼面组成的控制水翼,用于控制拖曳体的升沉运动;拖曳体主腔体尾部刚性连接板状的水平稳定尾翼和竖直稳定尾翼,水平尾翼左右两端各安装有一对用于控制拖曳体转艏运动的直径为47.3 mm 的Ka 4-70/19A 标准导管螺旋桨[11];拖曳体拖点置于主腔体前上方,拖曳体由母船通过缆绳提供向前运动的拖曳力。

图3 水下拖曳体及其运动控制机构Fig.3 Underwater towed vehicle and its motion control mechanism

表1 水下拖曳系统主要参数Tab.1 Primary parameters of the underwater towed system
1.6 计算域
控制机构动作下水下拖曳体的复合运动数值模拟采用STAR-CCM+求解器求解并由重叠网格[12-15]嵌套滑移网格[16-18]技术实现。如图4所示,本文的数值计算中计算域分为6部分:背景域Ⅰ为一尺度为L1×B1×D1=3.5 m×2.0 m×2.0 m 的长方体,重叠域Ⅱ由一L2×B2×D2=0.6 m×0.5 m×0.4 m 的长方体减去拖曳体主体以及构成左水翼旋转域Ⅲ、右水翼旋转域Ⅳ、左螺旋桨旋转域Ⅴ、右螺旋桨旋转域Ⅵ的多个圆柱体得到,左水翼旋转域Ⅲ、右水翼旋转域Ⅳ、左螺旋桨旋转域Ⅴ、右螺旋桨旋转域Ⅵ等由上述圆柱体减去相应的控制机构得到。

图4 计算域Fig.4 Computational domain
计算过程中,背景域Ⅰ模拟开阔水域,背景域Ⅰ与重叠域Ⅱ之间通过线性插值的方法交互流场信息;计算域Ⅲ~Ⅵ可在拖曳体运动坐标系O2-X2Y2Z2下做定轴旋转运动的同时跟随重叠域Ⅱ做六自由度运动,重叠域Ⅱ与计算域Ⅲ~Ⅵ共同构成一个多重运动组合计算域,计算域Ⅲ~Ⅵ与重叠域Ⅱ之间通过相应的滑移边界传递数据;重叠域Ⅱ与计算域Ⅲ~Ⅵ所包含的所有物面构成水下拖曳体多重运动组合体,水下拖曳体多重运动组合体继承控制机构所受到的流体力,各控制机构的运动通过在拖曳体运动坐标系O2-X2Y2Z2下控制相应计算域的运动来实现。如此,拖航状态下流场与水下拖曳体固体运动(含控制动作)之间实现动态交互。
文中采用切割体网格对背景域Ⅰ进行离散,采用多面体网格[19]对重叠域Ⅱ、左水翼旋转域Ⅲ、右水翼旋转域Ⅳ、左螺旋桨旋转域Ⅴ、右螺旋桨旋转域Ⅵ等进行离散,图5~6为拖曳体表面及其附近区域边界层等网格示意图。表2给出了文中各个子计算域以及整体综合计算域(背景域Ⅰ)的边界条件定义。

图5 拖曳体物面网格Fig.5 Surface mesh of the towed vehicle
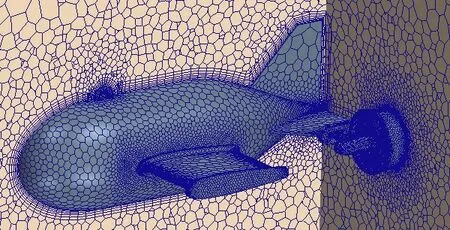
图6 重叠域Ⅱ拖曳体附近网格剖面Fig.6 Mesh section near the towed vehicle in Overlapping Domain II

表2 主要边界条件Tab.2 Principal boundary conditions
2 结果与分析
2.1 数值方法验证
为了检验文中数值方法数值模拟水下拖曳体水动力特性的有效性,在本课题组研发的自主稳定可控制水下拖曳体横荡控制拖曳水池试验的基础上[20],运用文中数值方法建立等效数值模型进行数值模拟,并将数值结果与试验值对比。其中在水下拖曳体横荡控制试验中,拖车速度为0.6 m/s,两个尾推进器(螺旋桨)连续交替运转8 s。图7 为自主稳定可控制水下拖曳体物面网格,图8 为一个螺旋桨动作周期内自主稳定可控制水下拖曳体横荡值数值结果与滤波后的试验结果时历曲线。可以看出,水下拖曳体横荡值数值结果与试验值相差较小,数值结果绝对误差控制在10 mm以内。
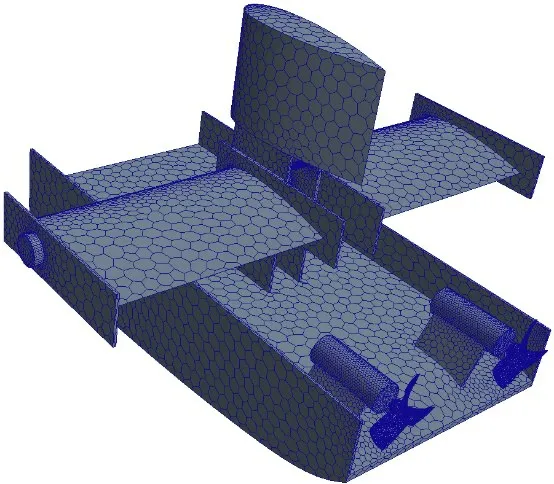
图7 自主稳定可控制拖曳体物面网格Fig.7 Surface mesh of the self-stable controllable towed vehicle

图8 一个控制周期内横荡数值结果与试验结果比较Fig.8 Comparison of numerical solution and experimental value in one control period
2.2 水下拖曳系统控制动作下数值结果分析
从图8的结果可以看出,数值模拟结果与试验结果符合良好,对比结果表明采用文中所提出的方法进行水下拖曳体水动力特性计算可以得到符合工程实际需要的合理结果。
本节以文中所提出的数值模拟方法来观察1.5 节所描述的可控制水下拖曳系统在不同的拖曳与控制工况下的拖曳系统水动力状态,分析不同的操纵控制动作对拖曳体及其拖曳缆绳动力特性的影响。在各拖曳与控制工况初始时刻,水下拖曳体及其控制机构均静置在静水中特定位置,拖曳缆绳呈自然下垂状态,自计算开始时刻释放拖曳体;文中在描述水下拖曳体运动时,将拖曳体重心G在拖曳体半固定坐标系O-xyz的x、y和z方向上平移运动的偏移量分别定义为纵荡、横荡和垂荡,将拖曳体绕拖曳体运动坐标系O2-X2Y2Z2的X2、Y2和Z2轴的旋转运动偏移量分别定义为横摇、纵摇和艏摇。
2.2.1 无控制拖航下水下拖曳体水动力特性
在文中无控制动作下做定速拖航数值模拟中水下拖曳体的控制水翼与导管桨不发出任何控制动作,而是作为与拖曳体主腔体无相对运动的附体考虑。图9~10为拖曳体在拖速v=2 kn条件下无控制定速拖航时线运动与角运动的时历曲线。从这两图的计算结果可以看出:系统稳定后拖曳体的线运动与角运动值逐渐趋于稳定,运动姿态不再随时间变化而无规则变化,无控制定速拖航是一个准稳态过程。
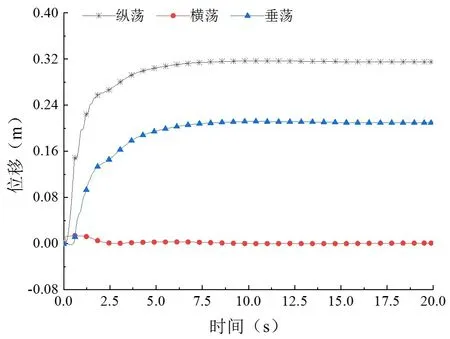
图9 无控制动作拖航线位移(v=2 kn)Fig.9 Linear displacement of towing without control action(v=2 kn)

图10无控制动作拖航角位移(v=2 kn)Fig.10 Angular displacement of towing without control action(v=2 kn)
图11 为水下拖曳系统做无控制定速拖航时系统稳定后拖曳体位移与纵倾角随拖速变化关系曲线图,图12 为拖曳体所受阻力与缆绳拖曳力均值随拖速变化的关系曲线。由图11 可以看出:在一定拖速范围内,随着拖速增大拖曳体相对于拖曳母船逐渐向后、向上偏移;拖曳体艉倾幅值减小逐渐趋于艏倾;而当拖速继续增大并超过某一临界值后拖曳体又向前、向下小幅度偏移、微幅抬艏且随着拖速继续增大拖曳体运动偏移幅度逐渐趋于稳定。由图12的结果可以看出:拖曳体所受阻力与缆绳拖曳力随拖速的增加而呈开口向上的抛物线状增大,二者与拖速近似满足二次曲线关系,拖曳力与阻力的差值则随拖速增大而呈先减小后增大的变化趋势,这与拖曳体纵向偏移在一定拖速范围内先随拖速增大而增大、拖速大于某一临界值后又逐渐减小并趋于稳定的运动规律引起缆绳拖曳力与阻力夹角先增大后减小随后又趋于稳定的客观变化规律吻合。

图11 不同拖速下拖曳体线位移与纵倾角Fig.11 Linear displacement and trim angle of towed vehicle at different towing speeds
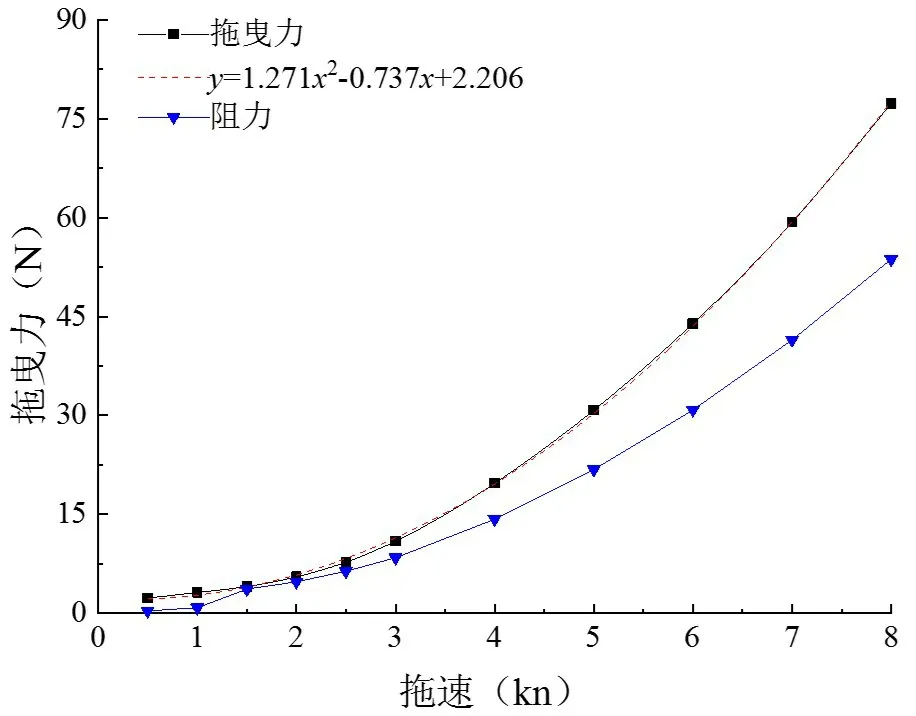
图12 不同拖速下拖曳力与阻力Fig.12 Towing force and resistance at different towing speeds
2.2.2 水翼正弦摆动控制下水下拖曳系统水动力特性
本小节观察水下拖曳系统在未计及变形量的拖曳缆绳长度增量与导管桨转速均保持为零、水翼偏转角以周期为5 s作正弦规律变化控制下定速拖航时的水动力特性。记水翼弦线在水下拖曳体中纵剖面上的投影与水下拖曳体纵轴的夹角为水翼偏转角φ,水翼前缘投影位于水下拖曳体纵轴上方时水翼偏转角为正、位于水下拖曳体纵轴下方时水翼偏转角为负、位于水下拖曳体纵轴上且水翼前缘在水翼后缘之前时水翼偏转角为零,水翼偏转角定义如图13所示(Y2H垂直纸面向外)。水翼偏转角的数学表达式为


图13 水翼偏转角φ示意图Fig.13 Sketch of hydrofoil deflection angle
式中:φ为水翼偏转角,单位为rad;t为时间,单位为s。
图14 为不同拖曳速度下水翼摆动控制时水翼迫沉控制力的时历曲线,图15~17 则分别给出了不同拖速下水翼摆动控制时拖曳体阻力、阻力增值以及缆绳拖曳力随时间变化曲线。由图14计算结果可以看出,在同样的转角变化周期、不同的拖曳速度条件下,水翼迫沉控制力表现出近似同步的周期性变化,在较低拖曳速度下一个控制周期内水翼摆动产生的使拖曳体产生上浮运动趋势的提升力与使拖曳体产生下沉运动趋势的迫沉力相当,而随着拖曳速度增大,水翼摆动产生的迫沉力显著大于提升力,且拖速越大二者差异越显著。这是由于在水翼控制力诱导下拖曳体受到的拖航阻力、缆绳拖曳力发生变化破坏了拖曳体原有的纵倾平衡状态,使拖曳体艏倾进而使水翼攻角(水翼弦线与拖曳速度夹角,上扬为正,下俯为负)减小引起的。从图15~17的结果可以看出,由于水翼偏转角变化直接或间接引起了拖曳体迎流截面等的大小变化,不同拖速下的拖曳体阻力、阻力增值以及与阻力密切相关的缆绳拖曳力均随水翼周期性摆动而呈周期性振荡且振荡周期与水翼摆动周期相近,阻力与缆绳拖曳力在一个控制周期内呈现出先增大后减小的变化规律,并在四分之三个周期即水翼摆动下限附近取得极大值,在水翼逐渐回复至平衡位置附近时取得极小值;此外,随着拖曳体姿态尤其是纵倾角因拖速增大而增大,拖曳体所受阻力与缆绳拖曳力的峰值显著增大。

图14 水翼控制力时历曲线Fig.14 Time histories of hydrofoil control force
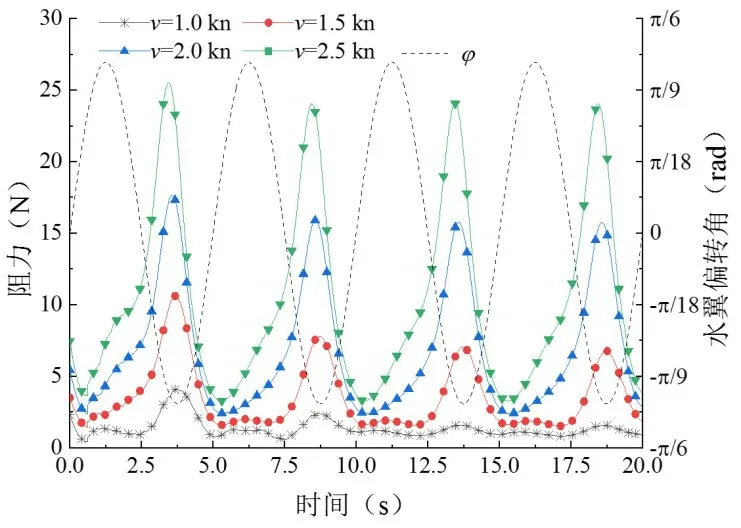
图15 拖曳体阻力时历曲线Fig.15 Time histories of resistance of towed vehicle

图16 拖曳体阻力增值时历曲线Fig.16 Time histories of added resistance of towed vehicle
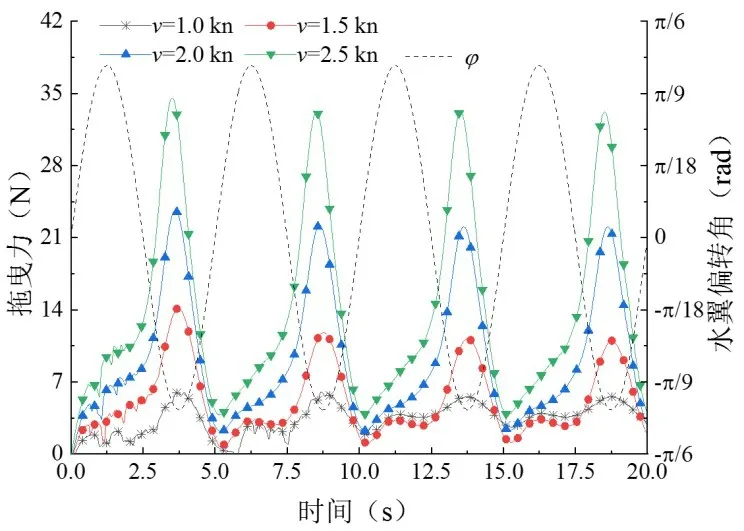
图17 缆绳拖曳力时历曲线Fig.17 Time histories of towing force generated by towing cable
图18 给出了不同拖速下拖曳体在一个水翼摆动周期内其垂荡与纵摇的时历曲线,图19~20 为在拖速v=2.0 kn条件下拖曳体所表现出的线位移和转角的时历曲线。从图18~20的结果可以发现,与无控制动作的定常速度拖曳状态相比,在水翼正弦摆动控制动作作用下,水下拖曳体的运动位置与姿态呈现出周期性变化,这种周期性的变化是以简谐振荡的规律在竖直面上作垂荡和纵摇运动。之所以表现出这样一种形态的运动,是由于水翼周期摆动所产生的竖直面上周期性控制力而造成的。由于拖曳体的结构形式以及控制力的作用方式均主要为关于竖直面对称,所以拖曳体关于水平面的运动幅值(横荡、横摇及艏摇)均很小,所表现出来的这些振荡幅值,大部分原因是由于迭代中的计算误差累积而成,从工程计算的角度考虑实际上可以忽略不计。
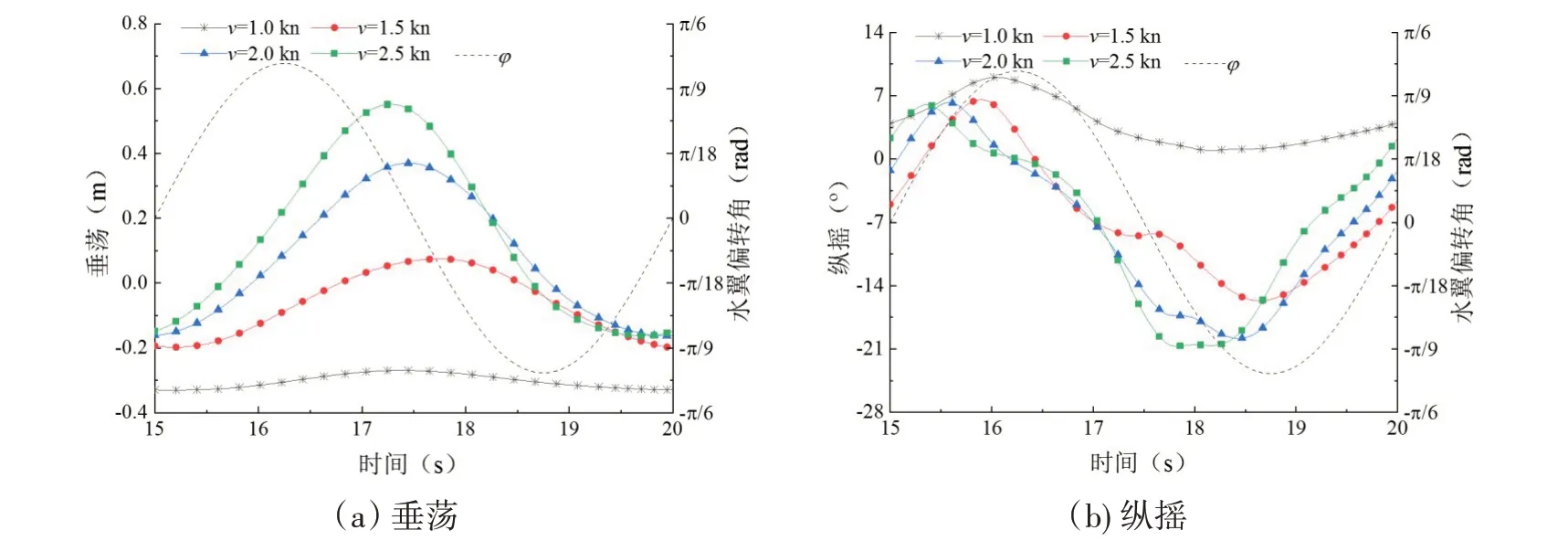
图18 一个水翼摆动周期内拖曳体的垂荡与纵摇Fig.18 Heave and pitch of towed vehicle in a period of hydrofoil swing

图19 线位移时历曲线(v=2.0 kn)Fig.19 Time histories of linear displacement of towed vehicle(v=2.0 kn)
从图19和图20的结果可以看到:水翼由零偏转角→正偏转角→负偏转角→零偏转角的一个摆动周期内,拖曳体呈现先逐渐上浮后又逐渐下沉并伴随纵倾角先逐渐增大后又逐渐减小的运动变化过程。由图14~17 的结果可知,这一现象是由于水翼摆动周期内水翼控制力变化诱导拖曳系统动力特性变化引起的:水翼偏转角由小增大时,水翼升力增大,拖曳体上浮;水翼偏转角由大逐渐减小时则情况相反。在这一对拖曳体的深度操纵控制过程中,在水翼迫沉控制力的诱导下,拖曳体受到的拖航阻力和缆绳拖曳力也会发生相应的改变,其综合作用使得拖曳体的纵倾状态也在不断地发生变化,从而引起拖曳体倾角的变化。在图18的结果中还可以注意到,拖速越大,拖曳体的垂荡幅值越大,拖曳体纵倾角的变化幅值也越大。结合图14~16 的结果综合分析可以知道,之所以出现图18 的拖曳体运动特征,是由于随着拖速的增大,水翼的迫沉控制力、拖曳体所受的阻力和缆绳拖曳力的振荡幅值也增大,这些大振荡幅值的联合作用,自然也导致了拖曳体在比较大的拖速条件下,其垂荡与纵摇的运动幅值也会随之增大。
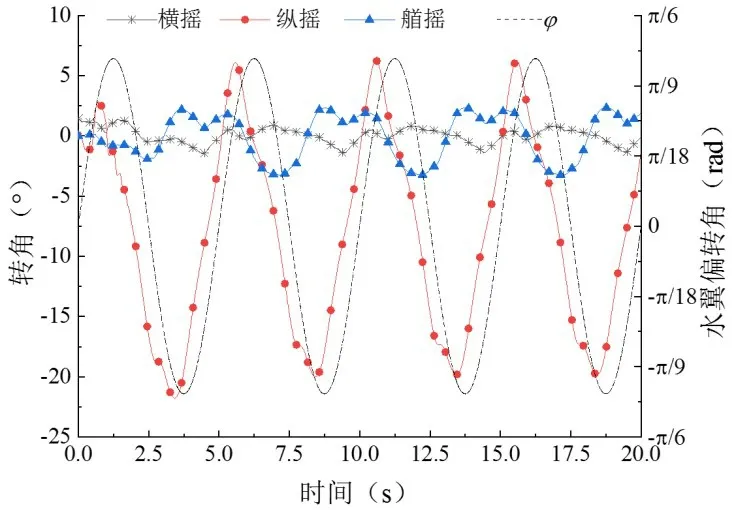
图20 角位移时历曲线(v=2.0 kn)Fig.20 Time histories of angular displacement of towed vehicle(v=2.0 kn)
2.2.3 导管桨交替正反转控制下水下拖曳系统水动力特性
本小节观察水下拖曳系统在未计及变形量的拖曳缆绳长度增量与水翼偏转角均保持为零、左右导管桨以周期为5 s的等速交替正反转时拖曳体所表现出的水动力特性。左、右侧导管桨的螺旋桨转速表达式分别为

式中:ωL、ωR分别为左、右侧螺旋桨转速,反转为正,单位为rad/s;t为时间,单位为s;N为设定的自然数。
图21~22给出了不同拖速下拖曳体一侧导管桨(左侧)的推力与转矩随时间变化曲线。从这两图的计算结果可以看出:由于匀速拖曳所引起的均匀来流作用下导管桨推力与转矩随拖速增大而显著减小,导管桨周期性交替正反转引起导管桨推力与转矩大小等周期变化且变化幅值随拖速增大而显著增大;此外,匀速拖曳所引起的导管桨进速较大,水流以负几何攻角与桨叶相遇使得导管桨在正反转时均产生了负推力以及负转矩,即导管桨推力与转矩方向均不随导管桨正反转交替变化而变化。图23~24 为不同拖速下拖曳体阻力与阻力增值时历曲线。可以看出,拖曳体阻力随左右导管桨交替正反转而出现周期性振荡并呈现出阻力增值振荡幅值随拖速增加而增大的总体趋势;图25为不同拖速下缆绳作用在拖曳体上的拖曳力随时间变化曲线。由该图计算结果可得出,左右导管桨交替正反转控制下缆绳拖曳力呈与拖航阻力类似的周期性变化,即缆绳拖曳力随左右导管桨交替正反转而出现周期性振荡并呈现出振荡幅值随拖速增加而增大的变化规律;图26则给出了不同拖速下左右导管桨交替正反转控制时缆绳作用在拖曳体上的转艏力矩随时间变化曲线。可以看出,不同拖速下缆绳作用在拖曳体上的转艏力矩呈现相似的变化规律:即左侧导管桨正转、右侧导管桨反转时缆绳作用在拖曳体上的转艏力矩迅速增加,而左侧导管桨反转、右侧导管桨正转时缆绳作用在拖曳体上的转艏力矩又迅速减小并在左侧导管桨反转、右侧导管桨正转过程中某一时刻跨越临界点反向增大。
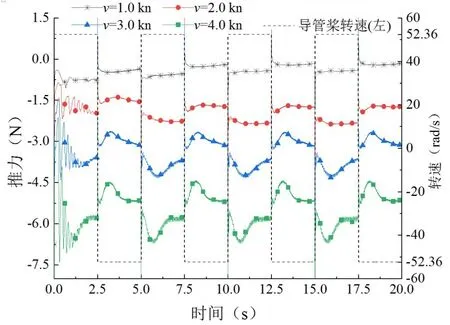
图21 左侧导管桨推力时历曲线Fig.21 Time histories of thrust on the left ducted propeller

图22 左侧导管桨转矩时历曲线Fig.22 Time histories of torque on the left ducted propeller
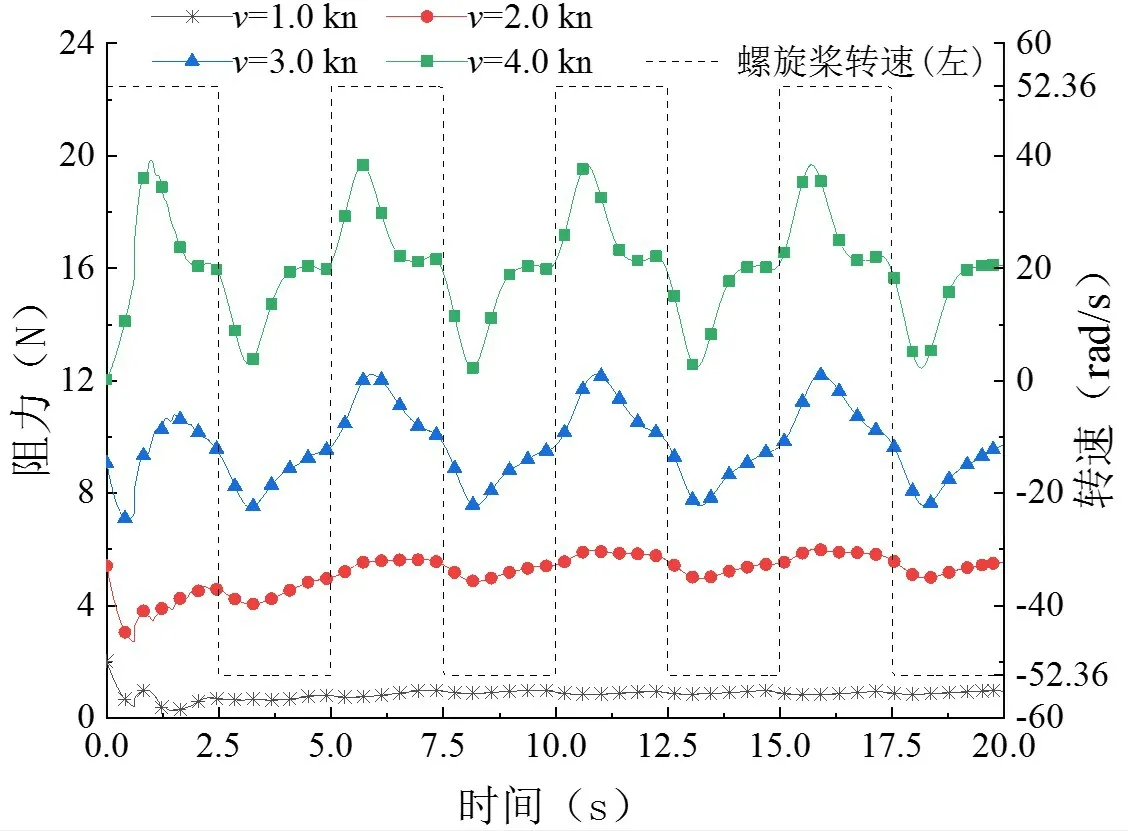
图23 拖曳体阻力时历曲线Fig.23 Time histories of resistance of towed vehicle

图24 拖曳体阻力增值时历曲线Fig.24 Time histories of added resistance of towed vehicle
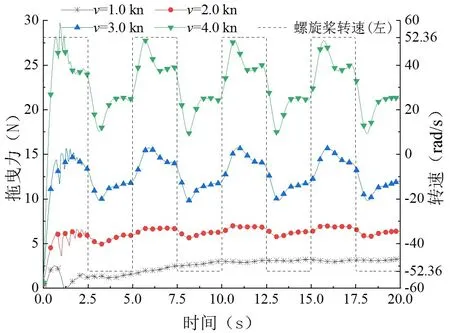
图25 缆绳拖曳力时历曲线Fig.25 Time histories of towing force

图26 缆绳转艏力矩时历曲线Fig.26 Time histories of turning moment generated by towing cable
导管桨等速交替正反转控制下水下拖曳体的运动是导管桨控制力诱导下导管桨控制力、缆绳拖曳力以及拖航阻力等共同作用的结果。图27 给出了不同拖速下左右导管桨等速交替正反转时一个导管桨控制周期内拖曳体运动的横荡与艏摇的时历曲线。图28~29 则以v=2.0 kn 为例给出了拖曳体位移、转角时历曲线。从图27~29的结果可以看出,导管桨周期控制动作下水下拖曳体做以横荡和摆艏运动为主的水平波浪式运动,这是由左、右导管桨交替正反转控制产生的推力差形成了周期性的诱导拖曳体摆艏的转艏力矩且这一转艏力矩主要位于水平面内这一特性决定的;自左侧导管桨开始反转、右侧导管桨开始正转记起的一个导管桨控制周期内,左、右侧导管桨反、正转均产生方向向后的推力,而左侧导管桨反转产生的推力比右侧导管桨正转小,这就在拖曳体上形成一个因导管桨推力大小不同而形成的、逆时针(由上往下看)的转艏力矩,这一转艏力矩诱导拖曳体向左侧转向;进一步地,拖曳体的转艏运动改变了缆绳拖曳力状态,拖曳缆绳产生顺时针的阻碍拖曳体继续转艏的力矩(如图26);相反地,在下半周期,左右导管桨、缆绳则均产生顺时针的转艏力矩协同作用诱导拖曳体做回复运动。因而在一个导管桨控制周期内,拖曳体经历艏向角由负逐渐变正再逐渐变负、横向位置从右逐渐往左再从左逐渐往右的变化。

图27 一个导管桨动作周期内拖曳体的横荡和艏摇Fig.27 Sway and yaw of towed vehicle in one action period of ducted propeller

图28 拖曳体线位移时历曲线(v=2.0 kn)Fig.28 Time histories of linear displacement of towed vehicle(v=2.0 kn)
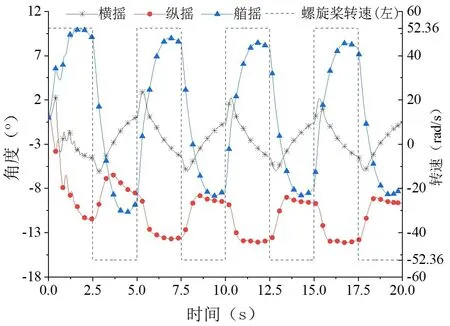
图29 拖曳体角位移时历曲线(v=2.0 kn)Fig.29 Time histories of angular displacement of towed vehicle(v=2.0 kn)
2.2.4 拖曳缆绳正弦收放控制下水下拖曳系统水动力特性
考虑水下拖曳系统在导管桨转速与水翼偏转角均保持为零、拖曳缆绳未计及变形量的长度增量以周期为5 s做正弦变化下定速拖航时的水动力特性,拖曳缆绳未计及变形量的长度的表达式为

式中:L为拖曳缆绳长度,单位为m;t为时间,单位为s。
图30~31以拖速v=2.0 kn为例时给出了拖曳体位移、转角时历曲线。图32~34给出了拖曳系统在不同拖速下进行收放缆控制时拖曳体纵摇、纵荡和垂荡时历曲线。图35~37 为这一控制过程中拖曳体所受阻力、阻力增值和拖曳力随时间变化曲线。显而易见,周期性收放缆控制下水下拖曳体呈现出变化周期与收放缆控制周期相近的、复杂的和以竖直面内为主的位置与姿态变化,拖曳体所受外力亦随周期性收放缆控制动作变化而呈周期性变化。由于拖速显著影响拖曳体的位置和姿态,进而引起和缆绳拖曳力与拖曳体前进方向夹角密切相关的缆绳长度增量在竖直和水平方向上的分量等的变化,使得不同拖速收放缆控制下拖曳体呈现出在拖速较低时垂荡较为显著而拖速较高时垂荡与纵摇运动逐渐被削弱、纵荡运动较为显著的运动规律。在一个稳定的拖曳缆绳控制周期内,随着缆绳长度增量由零开始逐渐增大,缆绳长度的增长打破了拖曳体纵倾平衡状态:一方面,拖曳状态下,缆绳长度增加使得拖曳体在流场作用下后移,拖曳力与拖曳体前进方向夹角减小,在假定阻力不变的情形下拖曳力减小;另一方面,随着拖曳力与拖曳体前进方向夹角减小,拖点处拖曳力在竖直方向上的分量减小,拖曳力在竖直面内形成的力矩不足以平衡重力和浮力等形成的、使拖曳体产生艏倾趋势的力矩,进而拖曳体艏倾增大(如图32 所示的状态),拖曳体迎流截面随之增大,拖曳体在重力和流体力诱导下呈下沉趋势(如图34所示的状态),拖航阻力增加,所需的拖曳力水平分量增大,拖曳力增大。在上述过程中,拖曳体阻力增大引起的拖曳力增大量显著大于拖曳力与拖曳体前进方向夹角减小带来的拖曳力减小量,因而拖曳缆绳释放过程中拖曳力呈增大趋势;相反地,当缆绳长度逐渐减小时,拖曳体呈艏倾减小、前移并同时上浮的运动趋势,同时阻力、拖曳力亦呈减小趋势。

图30 线位移时历曲线(v=2.0 kn)Fig.30 Time histories of linear displacement of towed vehicle(v=2.0 kn)

图31 角位移时历曲线(v=2.0 kn)Fig.31 Time histories of angular displacement of towed vehicle(v=2.0 kn)
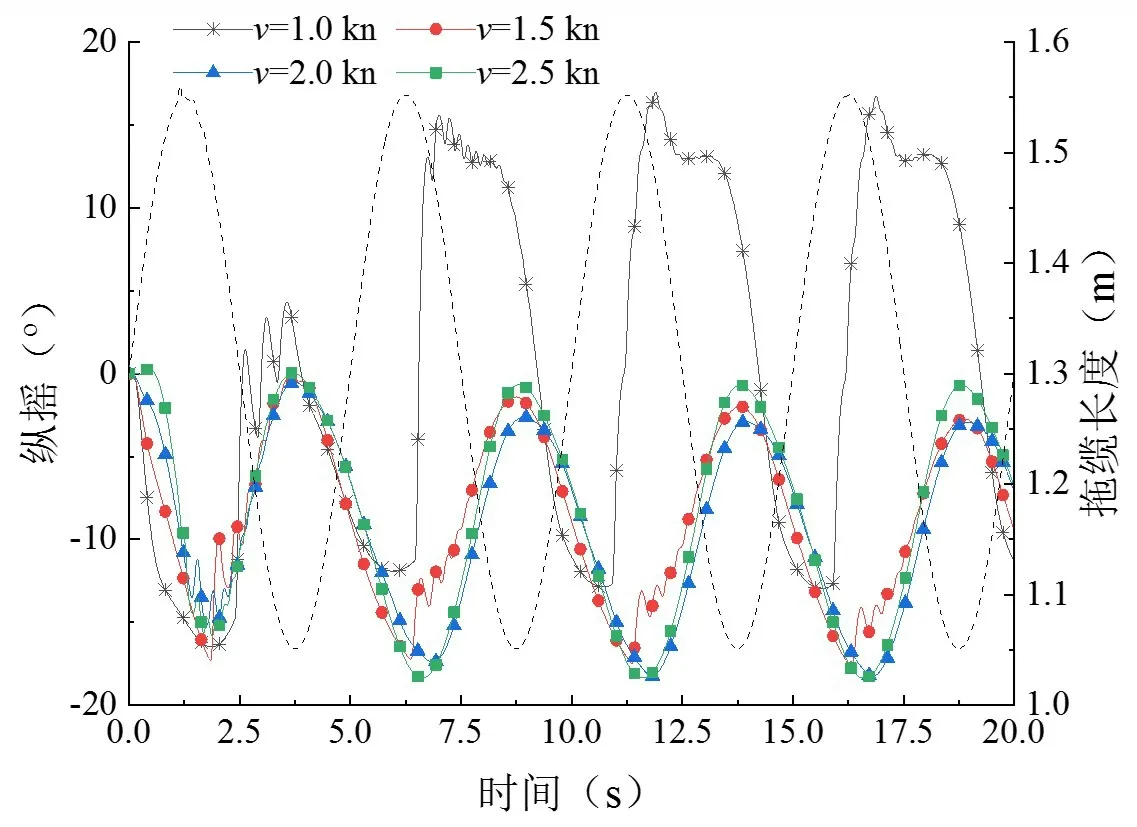
图32 拖曳体纵摇时历曲线Fig.32 Time histories of pitch of towed vehicle

图33 拖曳体纵荡时历曲线Fig.33 Time histories of surge of towed vehicle

图34 拖曳体垂荡时历曲线Fig.34 Time histories of heave of towed vehicle
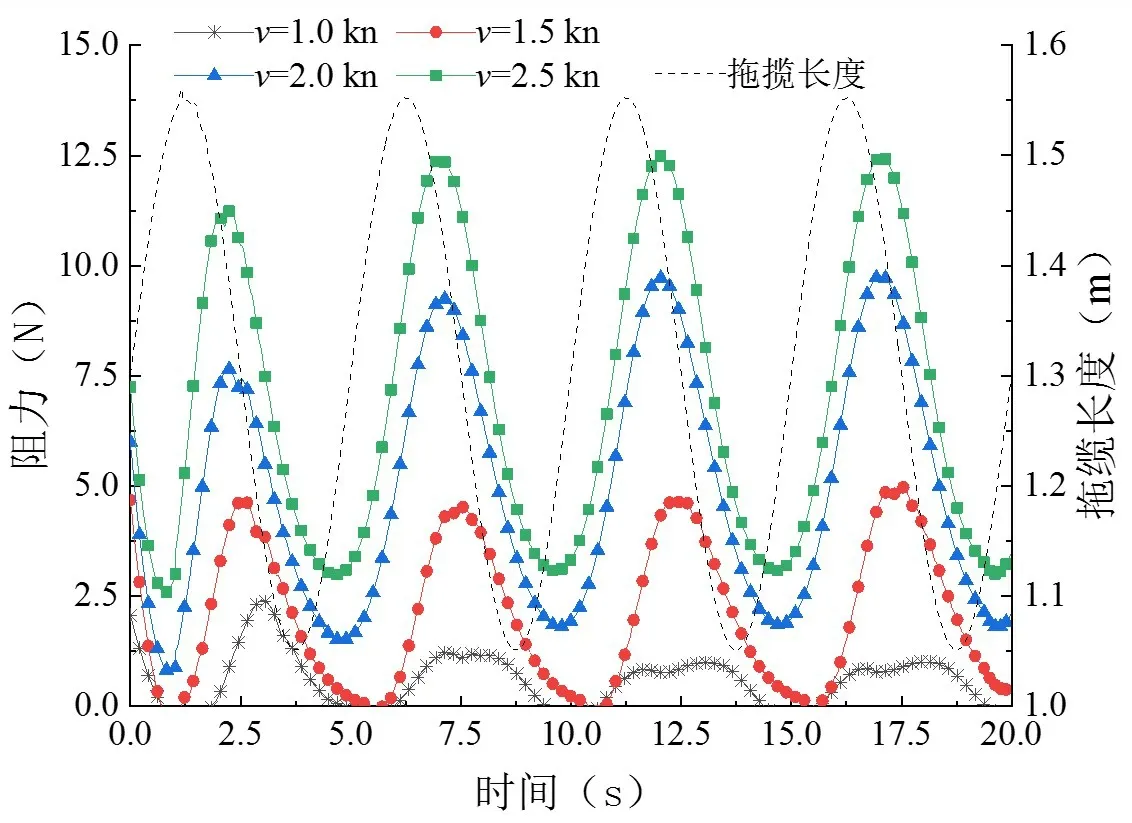
图35 拖曳体阻力时历曲线Fig.35 Time histories of resistance of towed vehicle

图36 拖曳体阻力增值时历曲线Fig.36 Time histories of added resistance of towed vehicle
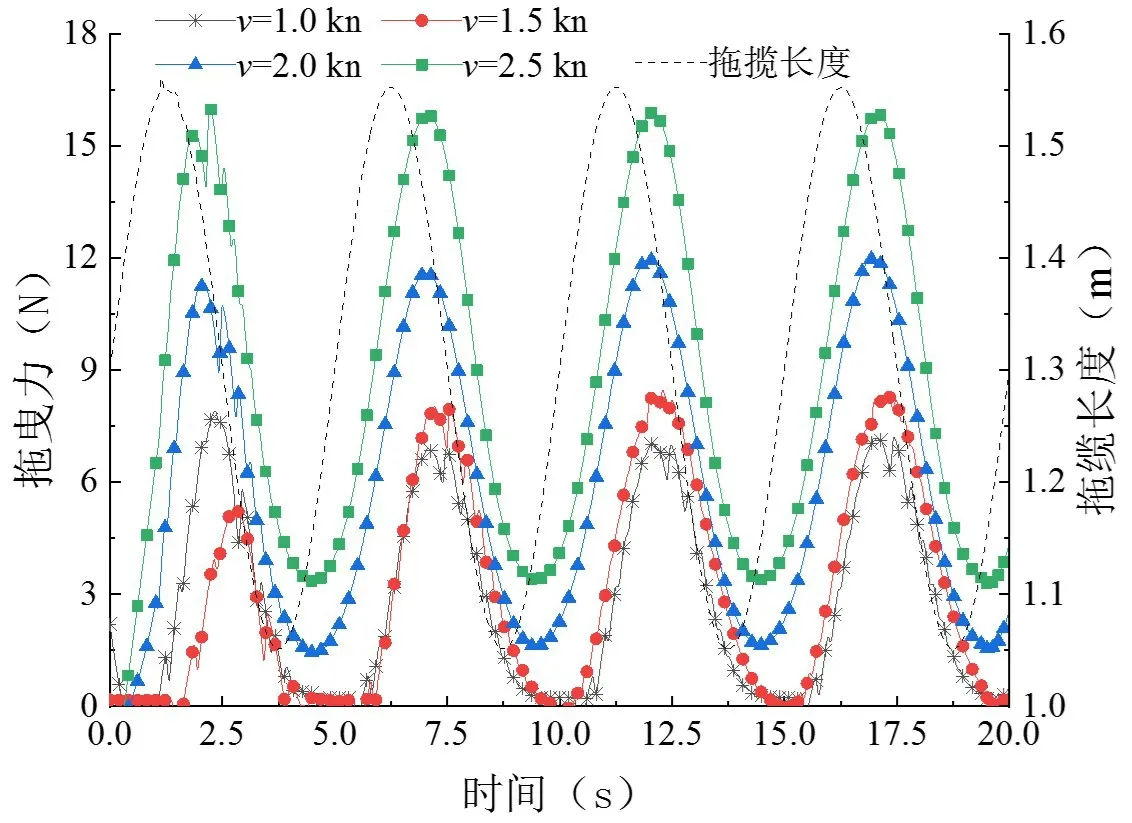
图37 缆绳拖曳力时历曲线Fig.37 Time histories of towing force generated by towing cable
如图35~37 所示,在自缆绳长度增量由零开始增大记起的一个控制周期内,拖航阻力、阻力增值以及缆绳拖曳力均随收放缆周期动作而周期性变化,呈现出先随缆绳长度增大而增大的趋势并在拖曳缆绳自最大长度回收过程的某一时刻取得极大值,尔后拖航阻力、阻力增值以及缆绳拖曳力随着缆绳逐渐回收,拖曳体抬艏而逐渐呈减小趋势,并在拖曳缆绳自最小长度释放过程中的某一时刻取得极小值的变化规律。这是由拖曳缆绳正弦收放控制过程中拖速、拖曳体缆绳长度以及拖曳体姿态变化共同引起的。
3 结 论
本文运用基于重叠网格嵌套滑移网格技术的计算流体力学方法对匀速拖曳工况中水翼升沉正弦摆动、导管桨交替正反转控制,以及收放缆控制等控制动作下水下拖曳系统水动力特性进行了求解并分析了水下拖曳体的运动姿态、导管螺旋桨与控制水翼的控制力特性,以及拖曳缆绳的拖曳力特性及其相互之间的关系,得出了以下结论:
(1)水下拖曳体阻力与缆绳拖曳力在无动作拖航时随着拖速的增加而呈开口向上的抛物线状增大,缆绳拖曳力与拖速近似满足二次曲线关系;拖曳力与阻力的差值随拖航速度增大而呈现先减小后增大的变化趋势;而在水翼升沉正弦摆动、导管桨交替正反转控制以及收放缆控制等不同周期性控制动作下,水下拖曳体阻力、阻力增值与缆绳拖曳力均随控制动作周期性变化而呈周期性振荡,且振荡幅值随拖航速度增加而增大。
(2)水翼升沉正弦摆动控制动作下,水翼控制力与水翼偏转角近似同步变化,自水翼由平衡位置开始向上摆动记起的一个控制周期内水翼摆动产生的迫沉力与提升力的差值随拖速的增大而显著增大,拖航阻力与缆绳拖曳力在一个控制周期内呈现先增大后减小的变化规律。
(3)导管桨交替正反转控制动作下,导管桨推力与转矩大小作等周期变化且变化幅值随拖航速度的增大而显著增大,导管桨的正转推力与转矩随拖航速度的增大而显著减小、反转推力与转矩则随拖航速度的增大而显著增大;缆绳作用在拖曳体上的转艏力矩随左右导管桨交替正反转诱导而呈周期性变化,导管桨交替正反转控制动作下水下拖曳体蛇形机动是导管桨诱导下导管桨推力、阻力与缆绳拖曳力耦合作用的结果。
(4)拖曳缆绳正弦收放控制动作下,拖曳体阻力、阻力增值以及缆绳拖曳力在自缆绳长度增量由零开始增大记起的一个控制周期内拖航阻力与阻力增值均先随缆绳长度增大而增大,并在拖曳缆绳自最大长度回收过程中的某一时刻取得极大值,尔后拖航阻力与阻力增值随着缆绳逐渐回收而逐渐减小并在拖曳缆绳自最小长度释放过程中的某一时刻取得极小值。