基于并联解耦机构的三自由度打印平台研究
2022-07-25李国超王嘉骥
李国超,王嘉骥
(河北石油职业技术大学 机械工程系,河北 承德 067000)
作为一种新型增材制造技术,3D打印相比于传统的机加工方式,具有较高的原材料利用率,同时制造周期较短,广泛应用于医疗康复、汽车制造等领域,受到广大科研工作者的青睐[1]。但是受限于打印成型原理,打印过程中需要添加支撑,增加了打印时间,与此同时打印质量也受到了较大影响[2]。本文提出的一种具有部分解耦的并联机构作为3D打印机的下平台,在打印时通过控制下平台,使其倾斜一定角度来增加悬臂件与水平面的角度,进而减少支撑,不仅节约材料而且降低了后处理难度。
1 现有打印机原理及并联平台减少支撑分析
目前多数的并联3D打印机采用Delta型并联机构,如图1所示,图1所示的并联3D打印机,其上部分为3-P[2-SS]并联机构,下面打印平台固定不动,在堆积成型过程中通过控制每个分支来实现喷头沿X轴、Y轴、Z轴3个轴的移动来实现打印,控制相对比较简单,但大角度的悬臂件需要添加支撑,这样不仅耗费额外的材料,而且增加了3D打印时间以及后期的处理难度。

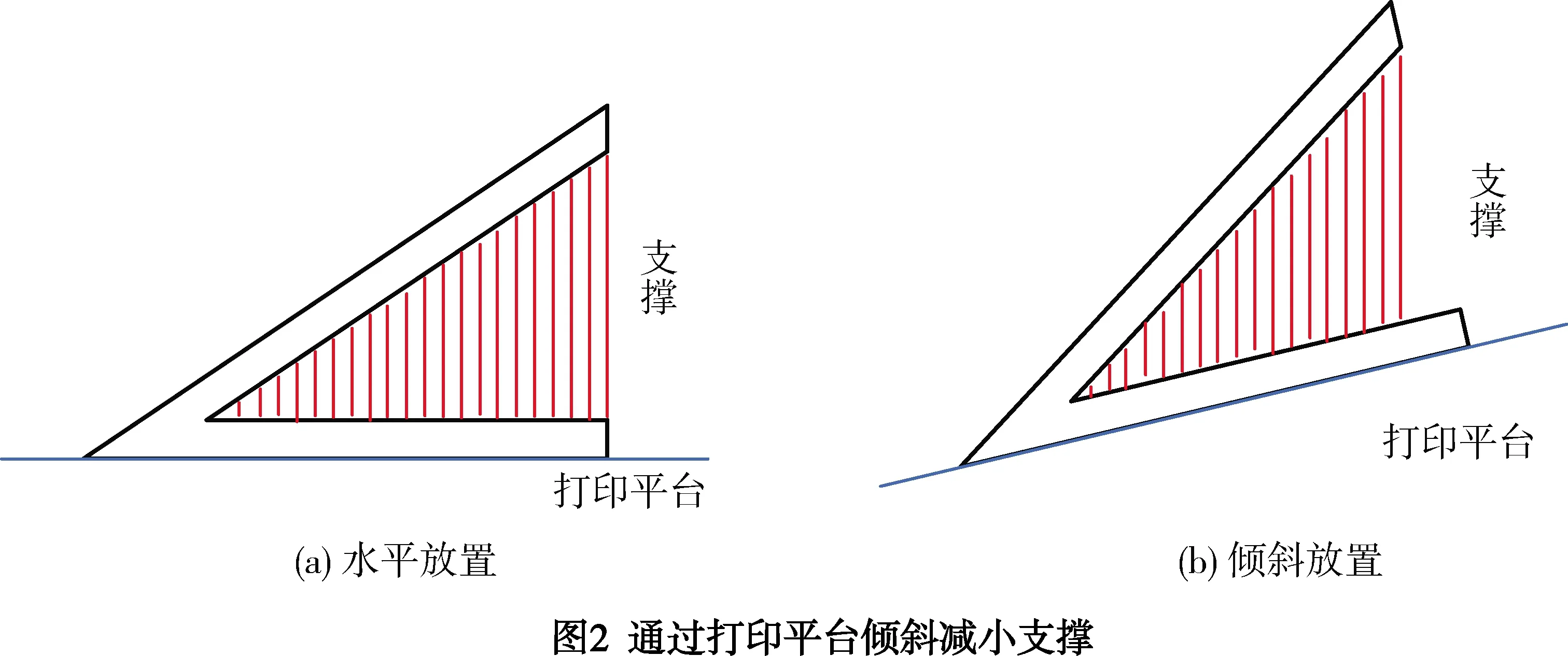
图1中Delta型3D打印机打印零件成型的基本过程成为:三维软件建模保存为STL格式→Simplify3D等切片软件进行切片保存为gcode格式→打印机根据切片逐层打印→去除支撑、表面处理等[3]。打印悬臂件或者中空件时受到重力的影响,为了避免坍塌,需要为打印件添加支撑,这样不但耗费材料而且还会增加打印时间。本文提出的可倾斜平台主要作用就是通过控制打印平台使其倾斜一定角度,平衡一部分重力,如图2所示,这样打印时就会减少一部分支撑,节约了材料和时间,当倾斜到某一角度时,试件则不需要支撑了,材料消耗量和时间将会大幅减少。
2 3D打印平台结构设计及分析
由于并联机构具有精度高、动态响应好、无累积误差等优点[4],但是并联机构相互耦合性较强,使得其在运动学、动力学的求解以及系统控制等方面变得十分繁杂。然而解耦的并联机构不仅继承了并联机构的优点,同时又具有机构简单、控制简单、安装方便等特点[5-6],结合上一节的需求,提出了一种具有部分解耦的并联打印平台。本节主要针对R-(R+RPR)-P+2UPS并联机构进行研究,其结构简图如图3所示(说明:P为移动副,R为转动副,S为球副)。
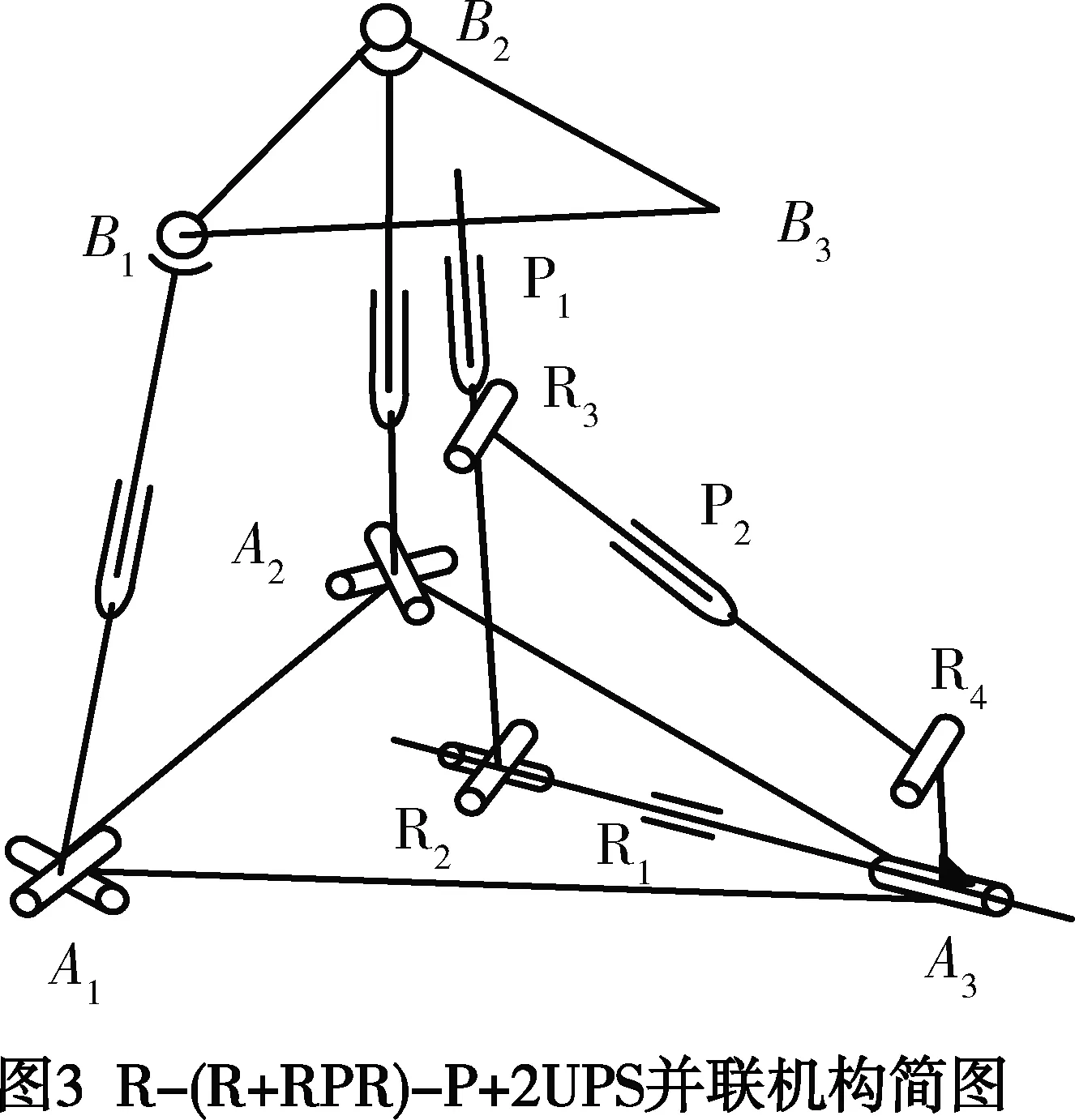
在图3中的R-(R+RPR)-P+2UPS并联机构中,由转动副R2、R3、R4和移动副P2组成的RRPR闭环子链始终共面,为了便于研究,本文将此闭环子链简化为广义运动副,闭环RRPR子链的机构简图如图4所示。

在图4的闭环子链中,杆PM2固定不动,杆PM1可以绕点P转动。笛卡尔直角坐标系P-XAYAZA中的XA轴与杆PM2重合,XA轴正方向由P指向M2,ZA轴的正方向垂直于此闭环子链向外。令M1、M2点的坐标分别为M1=(m1n10),M2=(m20 0),由固定机架到活动杆PM1有两条分支,分支1仅包含一个转动副R,分支2包含RPR分支,应用螺旋理论可以求出分支1的运动螺旋系为:
$11=(0 0 1; 0 0 0)
(1)
对式(1)运动螺旋求反可得:
(2)
分支2的运动螺旋系为:
(3)
对式(3)的运动螺旋系求反可得:
(4)
通过对式(2)和式(4)分析可知,两个分支对活动杆PM1的公共约束螺旋系与式(2)相同,故此闭环RRPR子链仅存在绕ZA轴转动的这一个自由度,所以其可以等效为一个转动副。等效后并联机构简图如图5所示。

由螺旋理论知识可以得出UPS分支具有6个自由度,故并联机构中2个UPS分支对上平台不具有约束作用。为了分析中间UP分支,建立UP分支坐标系O3-X3Y3Z3,如图6所示。其中虎克铰A3的两个转动轴线分别与X3轴和Y3轴的轴线重合,Z3轴垂直于X3轴和Y3轴所在平面。

UP中间约束分支的运动螺旋系如下:
(5)
对式(5)的中间约束分支运动螺旋系求逆,可以得到:
(6)
上面构造的R-(R+RPR)-P+2UPS并联机构中的RRPR闭环子链始终在空间某一平面内,对于这样的并联机构在求解自由度时,我们不能直接将此机构应用修正的G-K公式进行计算,因此采用图5等效后的并联机构计算其自由度。
利用修正的G-K公式计算该机构的自由度,公式如下:
(7)
式中:M为机构的自由度;n为包含机架的构件数目;g为运动副的数目;fi为第i个运动副的自由度数;μ为机构中全部过约束的总数。
应用式(7)中的自由度计算公式可以计算出图4中并联机构的自由度为3,同理R-(R+RPR)-P+2UPS并联机构自由度也为3。与此同时,由螺旋理论知识可知,式(6)中的中间分支3个约束螺旋线性无关,说明中间约束分支对上平台有3个约束,而且由于2个对称布置的UPS驱动分支对上平台没有约束螺旋,所以3个分支对上平台的约束螺旋和式(6)相同,而且上平台的运动形式和中间约束分支的运动形式相同。由螺旋理论知识可得R-(R+RPR)-P+2UPS并联机构能够使平台实现两转一移的运动,满足第一节的打印平台倾斜要求。
3 打印实验验证
为了验证本文设计的R-(R+RPR)-P+2UPS并联机构能够减少3D打印构件的支撑且具有较好的打印效果,选用了图7所示的悬臂试件(厚度为5 mm)进行打印。
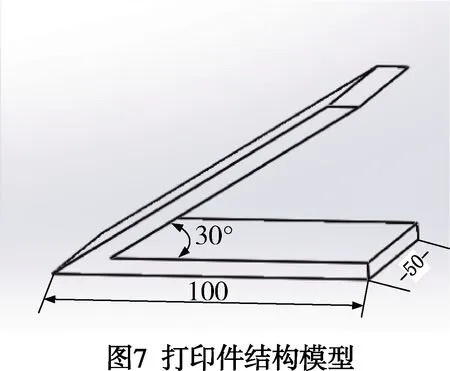
对图7 所示的试件逐个倾斜角度进行打印,记录试件打印的时间和所需耗材重量,得到了如图8所示的曲线图。
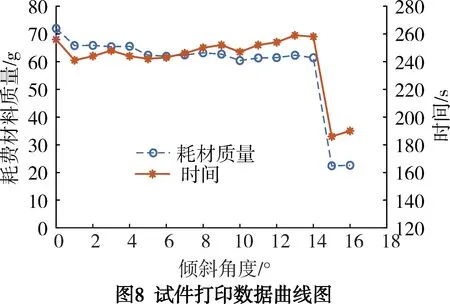
当平台倾斜转动角度为0°时,打印耗时为256 min,消耗材料71.97 g,随着旋转角度的增加,打印所需耗材质量有减少的趋势,打印时间在小幅波动,直到倾角转到15°时,耗材质量和打印时间均明显减少,耗材质量下降到22.41 g,下降了68.9%,打印时间下降到186 min,下降了23.7%,继续旋转到16°时,耗材质量及打印时间和15°基本相同。
4 结论
本文以3D打印技术为基础,提出了一种解耦的并联三自由度打印平台,并应用螺旋理论对其进行分析,建立了打印过程中模型坐标变化的方程,最后通过对悬臂件进行打印试验,耗材质量最多可下降68.9%,打印时间最多可下降23.7%,验证了并联打印平台对于悬臂件减少支撑的有效性。