诱饵干扰下无人机集群攻击阈值控制方法*
2022-07-25王晓光雷晓犇王小平马彩东
王晓光,雷晓犇,杜 军,王小平,马彩东,姚 欣
(1.空军工程大学航空工程学院,西安 710038;2.西北工业大学自动化学院,西安 710072;3.陕西师范大学大兴新区小学,西安 710016)
0 引言
随着无人机相关技术的逐渐发展成熟,无人机在现代战场上出现的频率越来越高。近年来,无人机已成功地用于各种对地攻击任务。在可预见的未来,无人机将应用于直接对空作战。因此,国内外相关研究人员开展了大量无人机空战决策方面的相关研究。
一些研究人员对空战战术机动中的作战决策问题展开研究。Dong 采用试验输入法(trial input method)对空战中飞机的自主决策问题进行了研究,并用该方法完成了对飞机状态的预测。McGrew用近似动态规划方法研究了一对一空战中的实时机动决策问题,完成了最优空战策略的有效逼近,并且通过作战仿真验证了算法在各种攻守态势下的鲁棒性。Goodrich 提出了一种被称为战术机动仿真(tactical maneuvering simulator,TMS)的批量空战仿真环境,TMS 可以用来评估和修正空战决策逻辑,在这种方法中,Goodrich 结合飞机的六自由度方程、控制律、气动特性和推力特性来获得高逼真度的空战仿真。
一些研究人员则开展了多机协同空战中的空战决策问题研究。这些研究的大体思路分为两步:首先对多机协同的空战态势进行评估,然后根据态势评估结果,采用启发式算法进行火力协同优化分配。在这些研究结果中,王晓光等人用两步裁定法来模拟空战双方的相互攻击,实现超视距空战中的损耗裁定。为了减少空战中的冗余信息,满足实时作战决策的要求,Gao 将粗糙集理论引入到协同空战火力分配决策分析中。
以上研究都是基于作战信息完全已知的假设。然而,在实际作战中由于敌方的刻意干扰和作战环境未知等原因,战场上总是不可避免地存在不确定因素,从而导致空战决策所需的各种信息并不被完全掌握。因此,为贴近实际作战需求,有必要对不确定条件下的无人机空战决策问题展开研究。文献[10]探讨了空战中敌方诱饵干扰所造成的不确定性,并给出了一对一攻击策略。文献[11]研究了红外干扰条件下飞机命中概率的计算方法。文献[12-14]分析了假目标影响下的无人机对地攻击作战决策问题。
在上述不确定条件下的作战决策问题研究中,研究对象大多为一架或多架飞机。对于几十架甚至数百架飞机来说,这些方法会导致异常复杂的计算。因此,对于大规模空战问题而言,往往采用系统方法来进行作战决策问题研究,而兰彻斯特方程法正是系统描述作战过程的一种典型方法,其广泛应用于集群作战问题研究中。文献[15-16]采用兰彻斯特方程对大规模空战的效能和成本效益进行了分析,但未给出最优攻击策略。文献[17]研究了数据链路支持下飞机的作战效能问题,并以此为基础进行了航空作战进程预测。
本文对诱饵干扰下无人机集群空战的攻击阈值控制问题展开研究。首先,结合无人机机载传感器的探测性能,利用兰彻斯特方程建立无人机空战模型;然后,在弹药约束下,将攻击阈值控制问题转化为最优控制问题;最后,利用直接凸优化法求解最优控制问题,以获得最优攻击阈值控制策略。
1 诱饵干扰下的无人机集群空战建模
空战想定如下:空战双方分别为红方和蓝方,当双方在空中相遇时,蓝方无人机立即发射诱饵,以干扰红方无人机的攻击决策。因此,红方无人机在开始攻击之前,首先需要利用机载传感器信息来识别该目标是否为蓝方无人机。由于诱饵很难完全模仿无人机目标特性,所以对于红方无人机来说目标不是不可分辨的。
1.1 机载传感器性能建模
如果红方的一架无人机遇到一个蓝方目标,一共会产生以下4 种结果:
1)遇到真目标(无人机),并且传感器正确识别,其概率为P;
2)遇到真目标,但传感器错误识别为假目标(诱饵),其概率为1-P;
3)遇到假目标,并且传感器正确识别,其概率为P;
4)遇到假目标,但传感器错误识别为真目标,其概率为1-P;
概率P和P两者并不独立,其关系为:
1.2 基于兰彻斯特方程的空战模型


1.3 空战模型中的兵力损耗约束

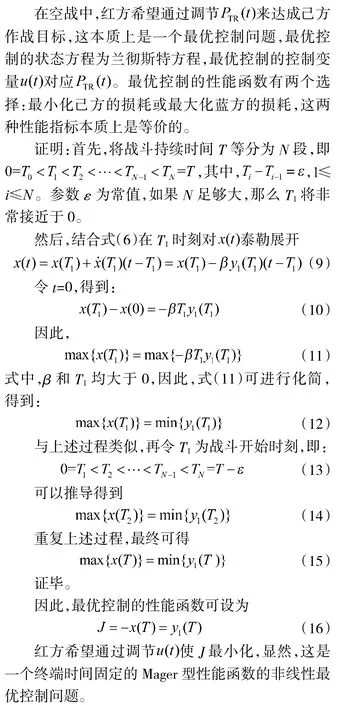
1.4 空战模型中的最优控制问题
2 诱饵干扰下的无人机最优攻击阈值控制问题求解
求解非线性最优控制的方法可分为两大类:间接法和直接法。间接法利用变分法来求解非线性最优控制问题,求解过程中不可避免地要解决两点边值问题,这将导致复杂的运算。直接法则将非线性最优控制问题转化为非线性规划问题,然后再进行求解,随着计算机技术的发展,直接法成为求解非线性最优控制问题的主流方法。直接凸优化法是直接法的一种,因其局部最优解与全局最优解的一致性而受到广泛的关注,同时直接凸优化法具有求解计算速度较快、全局收敛性好的特点,因此,可以采用此方法求解建模得到的最优控制问题。
3 仿真验证


表1 作战双方的参数设置
作战双方兵力变化情况如图2 所示。
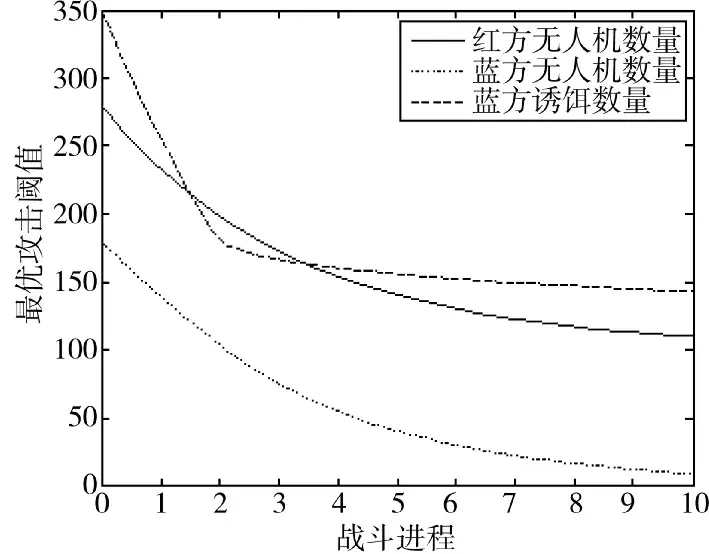
图2 红蓝双方的兵力随时间变化情况
如图1 和图2 所示,整个战斗过程可以分为两个阶段。在第1 阶段,蓝方拥有大量的无人机和诱饵。对于红方来说,此时很难从大量的目标中识别出蓝方的无人机,这时红方集群的最优策略是攻击遇到的每一个蓝方目标,从而使蓝方的无人机和诱饵数量迅速减少;在战斗的第2 阶段,蓝方的兵力损耗已经达到一定程度,此时,红方无人机开始逐渐降低攻击阈值,从而尽可能地将导弹用于杀伤蓝方的无人机。在此阶段,蓝方的无人机数量持续减少,但蓝方的诱饵数量变化缓慢,说明此时红方的攻击阈值控制策略能够保证对蓝方无人机的有效杀伤,并能够在一定程度上有效避免对蓝方诱饵的杀伤。同时随着红蓝双方兵力的损耗和红方攻击阈值的逐渐降低,红蓝双方的兵力变化速度逐渐降低。

图1 红方的最优攻击阈值控制策略曲线
在空战过程中,传感器性能参数c 对作战结果的影响如表2 所示。
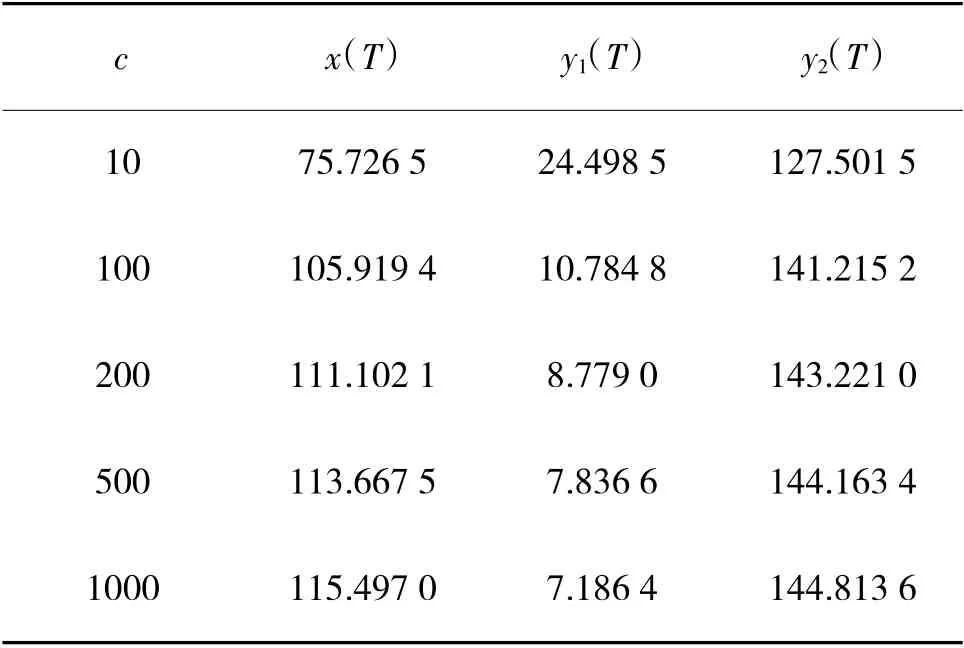
表2 传感器性能参数对作战结果的影响
4 结论
本文对诱饵干扰下无人机集群作战中的攻击阈值控制问题展开研究,主要工作以及得到的结论如下:
1)建立了诱饵干扰下无人机作战模型。以无人机的机载传感器性能分析为基础,得到真目标与假目标识别概率之间的关系。并以此为基础,建立诱饵干扰下无人机集群空战的兰彻斯特方程。
2)将无人机集群作战中的攻击阈值控制问题转化成为最优控制问题。首先,给出弹药约束条件下作战双方的兵力损耗约束;然后,建立了无人机集群作战的最优控制模型,并且证明了一方兵力的最大化等价于另一方兵力的最小化。
3)得到了诱饵干扰下红方无人机集群的最优攻击阈值控制策略。仿真结果表明,红方无人机集群的最优攻击阈值控制策略是在开始时攻击每一个蓝方目标,待蓝方的兵力损耗达到一定程度时,红方无人机集群应逐渐降低攻击阈值,从而尽可能地将火力集中在蓝方的无人机上,完成对蓝方无人机的最大杀伤。
4)探讨了传感器性能参数c 对作战结果的影响。仿真结果表明,c 值越大,对应红方无人机集群的作战效果越好。同时,随着c 的增加,作战结果对其变化敏感程度下降。
