一种便携式防空导弹自动控制系统研究
2022-07-25刘长江蔡瑞民贾小杰
刘长江,蔡瑞民,贾小杰
(解放军31697 部队,辽宁 大连 116104)
0 引言
20 世纪50 年代中期,红外寻的制导导弹首次被应用于战斗机平台。20 世纪60 年代,美国和前苏联先后研制出第一代便携式防空导弹。随后,红外寻的制导便携式防空导弹很快成为地面部队极为有效的近程低空/超低空防空力量之一,并在各次局部战场上得到了实战检验。特别是在现代防空作战中,恶劣的地形、气象条件和复杂电磁环境往往严重影响车载防空导弹、自行(或牵引)高炮等大型防空武器装备的机动部署和战术技术性能的发挥。因此,便携式防空导弹对于打击低空武装直升机、巡航导弹、无人机等“低、慢、小”及末端近程空袭目标具有重要意义。由于其体积小、反应灵活、操作简单、效费比高等诸多优点,便携式防空系统(MANPADS)已经成为世界各国防空体系的重要组成部分。
针对便携式防空导弹训练,部队重点发展了各类模拟训练系统,以提高操作人员与装备结合能力。目前使用的便携式防空导弹多采用单兵肩扛式发射,需要射手通过瞄准具对目标进行瞄准、跟踪,并在发射前给出发射前置量。但在实际应用中发现,便携式防空导弹发控系统存在人工操作环节多、精度低、稳定性弱等问题,使其受人为及外界因素影响大,命中概率低,作战效能无法充分发挥。
针对当前便携式防空导弹发展存在的现实问题,本文提出了一种便携式防空导弹自动控制系统设计方案,该系统通过将光电设备与某型便携式防空导弹融合为便携式防空导弹武器系统,能够有效提高便携式防空导弹搜索发现、跟踪目标及导弹发射的自动化,减少人工干预和不确定因素的干扰,从而提高便携式防空导弹的可靠性和命中概率。
1 系统总体设计
1.1 问题分析
目前,本型便携式防空导弹使用时一般需两人一组,射手通过目视搜索目标,肩扛发射具瞄准跟踪,手动打开供电供气装置,人工判断发射条件;满足发射条件后扣动扳机陀螺解锁,概略引入前置量,再次扣动扳机完成导弹发射。在实际应用过程中,该型便携式防空导弹逐渐暴露出自动化程度低、命中概率受人为因素影响大等不足,其问题主要表现在:
1)人工操作误差大,命中精度低。目标搜索跟踪、引入前置量、发射导弹,每个环节对人工操作准确性提出了很高要求。但实战场景下肩扛发射稳定性弱,偶然性大。且射手易受战场环境因素影响,导致动作变形甚至操作失误,将造成打击精度严重下降。
2)目视搜索距离短,响应速度慢。在能见度良好的情况下,目视搜索最大能力范围不超过5 km,射手很难及时发现打击目标。对于体积小、速度快的目标,将对射手快速捕获、准确操作提出更高要求,往往造成反应仓促,命中率大大降低。
3)信息化程度低,协同作战能力弱。该型便携式防空武器缺乏统一的指控系统,空情信息主要源于自主或上级传达,没有充分利用低空雷达等侦查
预警装备的情报信息,未形成整体防空体系,作战单元间协同能力较弱,打击效能低。
1.2 系统设计
1.2.1 解决问题思路
针对上述问题,考虑对该型便携式防空导弹进行信息化改造,提高其发控通信、发控执行的自动化水平。由于便携式防空导弹是费效比高、造价低廉的战术级防空武器,需要在兼顾其改造成本、单兵便携能力的基础上,进行软、硬件升级。综合以上分析,本文设计思路如下:
1)通过融合指挥镜数字系统代替人工搜索探测目标,以提高目标搜索距离及跟踪精度;
2)加装信息处理系统,自动解算空情数据形成射击诸元和前置量,提高导弹发控执行自动化水平,避免人工操作引入较大误差;
3)提高情报信息融合处理能力,使信息处理系统能够融合侦察预警网络(如低空雷达等)输入的空情数据,从而提高便携式防空导弹体系化作战能力。通过增加数据分发电路,将获得的空情信息可以同时传送给多个火力单元,发挥协同作战的打击效能。
1.2.2 总体方案
本系统主要由目标搜索指示单元、信息处理单元、显示控制单元、火力打击单元、供电系统等部分组成。如图1 所示,该系统充分利用通信、计算机、数字电路、自动控制等技术,完成目标搜集信号高速率、高精度传输,实现导弹控制的自动化,并使其与现有侦察预警网络实现兼容,促进空情信息的网络共享,通过综合集成和优化结构保证设备的可靠性和便携性。

图1 系统组成及结构框图各分系统方案设计
各分系统方案设计如下:
1)目标搜索指示单元
以某型数字指挥镜为主体构建目标搜索指示单元。数字指挥镜由观测镜、调平台、三角架、配套电缆等组成。具有电动连续变倍观察目标、激光测距、绝对码光电测角的功能,最大探测距离可达20 km,远远大于人工目视距离,且瞄准跟踪过程中受外界干扰影响较小,可自动为系统提供高速率、高精度的空情信息。目标搜索指示单元主要功能是搜索跟踪目标,测定目标在空中的运动参数并以数字信号的形式传送至信息处理单元,为火力打击单元提供目标指示。
2)信息处理单元
信息处理单元由数据处理模块、有线通信模块、系统控制模块、人机交互模块等组成,其主要功能是接收目标搜索指示单元和通信网络共享的空情信息,形成并输出伺服装置的控制信号和导弹射击诸元。通过融合、整合数字观察镜的机情器、解算器等功能,基于ARM 微处理器研制开发数据采集、信息处理、信号计算的信息处理系统。该单元能够采集数字观察镜和通信网络输出的空情数据,与一个或多个火力单元进行标校,自动解算目标速度、航路方位角、升降角等,并对数据进行解析、运算形成导弹射击诸元,复制后通过有线通信模块传送给一个或多个火力打击单元,在目标进入便携式防空导弹火力打击范围后,给火力单元发送射击指令,完成对来袭目标的射击。
3)显示控制单元
显示控制单元由控制电路、伺服电机驱动模块、有线通信模块及自动控制装置组成,其主要功能是接收射击诸元信号和控制信号,实现便携式导弹的自动控制。在接收到信息处理单元传递的射击诸元和控制指令后,通过伺服系统,控制导弹的随动装置、供电供气控制机构、陀螺启动和导弹发射控制电路,构成便携式防空导弹的自动控制系统,从而完成系统标定、对目标的稳定跟踪及导弹的射击等。
4)火力打击单元
火力打击单元以某型便携式防空导弹为主体,加改装导弹固定装置、调平台和三角架等设备,构成火力打击单元,实现武器系统改造升级。其主要功能是完成导弹调平、标校、定位,支撑并发射导弹等。通过导弹固定发射代替射手肩抗操作,从而减少人为操作误差引入,提高命中精度。
5)供电系统
供电系统由一部便携式3 kW 小型油机及配套电缆组成,为系统提供所需电源。
1.2.3 系统工作过程及原理
本文设计的自动控制系统通过上述单元模块的有效配合,可以完成对便携式防空导弹的改造升级,其工作过程及原理框图如图2 所示。本系统充分发挥现有光电设备搜索探测目标优势,同时该系统可将便携式防空导弹武器接入防空部队现役情报指挥系统,形成光电设备和各种雷达组成的侦察预警网络,有效规避电磁干扰和敌人的侦察打击,能够实现一部设备发现目标,侦察预警系统全网皆知信息共享,提高系统抗电磁干扰、地物回波的能力,以及战场生存的能力。其系统工作过程及相关原理如图2 所示。
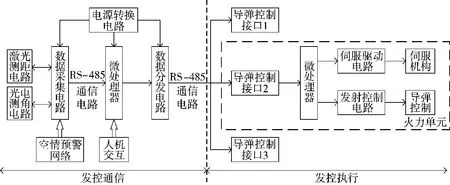
图2 自动控制系统原理框图
1)系统标校
在组织射击准备前需要对系统进行标校,一是本系统的标校,即利用数字观察镜与火力单元之间进行标校,为火力单元提供准确的射击诸元;二是与组网的侦察预警装备进行位置标校,保证系统在使用共享空情时射击诸元正确。
2)数字观察镜提供目标指示
观测手可选择“自主目指”工作方式(即自主搜索目标方式)。通过操作数字观察镜搜索捕获、跟踪目标,并输出目标的诸元(方位角、高低角,在满足条件下输出距离),送给信息处理单元的信息处理电路。信息处理电路根据接收到的目标信息、攻击方式指令(迎攻或尾追)、计算出一个或多个火力单元的射击诸元,通过控制系统使便携式防空导弹与数字观察镜同步随动搜索、捕获目标,火控手按下供电供气按钮,给探测装置供气,电子设备供电。在导弹稳定跟踪目标后,满足射击条件下,导弹的声、光信号提示在显控组合上通知火控手,火控手可根据时机,按下陀螺解锁。按下陀螺解锁按钮后,信息处理装置计算前置量,通过控制装置传送给导弹并装订。火控手按下导弹发射按钮,导弹发射。
3)侦察预警网络提供目标指示
观测手可选择“网络目指”工作方式(即接收侦察预警网络提供目标指示方式)。观测手可根据侦察预警网络提供的目标指示进行对空搜索目标。信息处理单元的信息处理电路自动接收网络目标指示信息,计算出各个火力单元的导弹射击诸元并传送给导弹。观测手可以同步跟踪目标,在网络目标指示信息不稳定或出现丢失时,可转换为“自主目指”工作方式,继续完成射击任务。火控手的操作及系统工作与“数字观察镜提供目标指示”方式相同。
2 关键技术解决方案
系统内部信号传递流程如图3 所示,其中,系统设计的关键技术主要有3 个方面:一是伺服系统的设计,必须满足数字观察镜与火力单元伺服机构在旋转角上的实时同步;二是精确计算导弹射击前置量,传给导弹控制机构,使导弹适时精准引入前置量;三是在不改变原装备结构的基础上,实现导弹射击操作的自动控制。
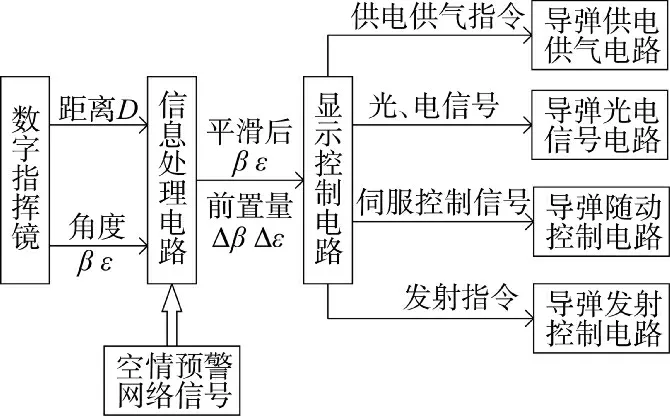
图3 系统信号流程框图
2.1 伺服系统的设计方案
数字观察镜输出目标的俯仰角β 和方位角ε信息是离散的,将导致伺服机构抖动,导弹无法稳定跟踪目标。本系统通过采用高性能微控制单元ARM 芯片开发平滑算法进行航迹外推,将离散的点迹恢复成目标连续运动的航迹。再根据时间函数推算出目标运动的航向、速度及当前点,形成伺服驱动信号,保证导弹随着数字观察镜稳定跟踪目标。
2.2 导弹射击前置量的计算方案
为了提高导引精度和导弹命中概率,人工操作时射手在实弹射击时必须判断估算引入前置量,人为因素导致误差较大。本系统在自动控制设计中采用软件处理方式,采集数字观察镜输出的目标速度、高度、航向、航路捷径和攻击角等诸元后,通过射表计算出前置量,在给出导弹解锁指令的同时给出前置量,通过控制系统赋予随动装置给导弹装订。
2.3 导弹发射的自动控制方案
在不改变数字观察镜和便携式防空导弹装备结构的基础上,需要实现导弹发射自动控制方案。人工发射便携式防空导弹时,射手除要进行目标搜索跟踪,还要完成激活供电电池、陀螺解锁、引入前置量和发射导弹等动作,受外界、心理因素影响大,射击命中概率低。本系统通过制作导弹供电供气钮转装置,火控手通过控制系统转动供电供气装置,完成导弹的供电供气。将导弹陀螺解锁和发射的发射机构电路融合到显控系统,由火控手在操作面板上控制。
3 结论
目前装备的便携式防空导弹大多需人工操作完成目视搜索、测距,概略装订前置量,受人为因素影响大;搜索目标距离近,预警时间短,应战准备仓促,这些因素都造成了导弹命中概率的下降。针对上述防空作战能力短板,本文对便携式防空导弹自动控制系统基本问题进行研究,立足现有装备,在不改变原装备结构的基础上通过加装、整合、信息系统升级,将数字观察镜和便携式防空导弹融合成便携式防空导弹武器系统,所设计的系统结构也将应用于实物系统,该系统将大幅减少人为因素影响,提高装备自动化能力,完善便携式防空导弹的作战效能,进一步提高防空兵作战能力。
