面向士兵体力增强的单兵助力机器人设计
2022-07-25周加永范天峰王保华冯博琳
周加永,胡 浩,范天峰,王保华,冯博琳
(1.西北机电工程研究所,陕西 咸阳 712099;2.北京理工大学机电学院,北京 100081;3.西安军代局驻咸阳地区军代室,陕西 咸阳 712099)
0 引言
在军事变革迅猛发展的今天,单兵已经成为未来信息化战争中最基本、最重要的作战平台。随着科技的进步以及装备种类越来越齐全,高强度和高消耗已成为现代战争的主要特点,为适应作战任务多样化要求,各国士兵们随身携带的武器装备越来越多,负重越来越大,导致士兵容易疲劳,饱受肌肉酸痛以及关节炎的苦恼。因此,增强士兵体能,避免骨骼肌肉损伤,增强单兵战斗力是亟需解决的重要问题,在此趋势下,利用技术措施增强士兵的体能,避免骨骼肌肉损伤已成为各国军方的研究热点。在实际军事应用需求牵引下,能够有效提高单兵体能的单兵助力机器人应运而生,单兵助力机器人是一种模仿人体外骨骼而开发的新型一体化装置,集成了信息感知、信息融合和智能控制等技术,穿戴在士兵身上,将士兵的智力和外骨骼的“体力”完美结合,能实现为士兵提供额外力量支撑和运动辅助等功能。
目前,美国的HULC、Soft Exosui、Onyx、TALOS、XOS2,俄罗斯的Rantnik-3、法国的Hercules、土耳其的ASYA 以及韩国的LEXO 等单兵助力机器人都依靠电力提供动力辅助,能为士兵提供有效的助力,然而对电力的依赖也使单兵助力机器人的应用受到限制。现有的电池技术无法持久地为单兵助力机器人提供能量,电力很有可能在任务中途就耗尽,严重影响单兵助力机器人在战场上的持续使用。单兵无源助力机器人无需外部能源,运用生物力学和人体运动负重管理,通过机械杠杆,将士兵负重转移到身体上的合理位置,能够协助士兵在战场上负载装备,而不影响士兵的战术动作。最近几年欧美等发达国家对无源助力机器人进行了深入研究,并有比较成熟的单兵无源助力机器人进行了战场试用。典型代表有加拿大仿生动力公司的被动式可穿戴柔性外骨骼Power Walk、加拿大MAWASHI 公司的UPRISE 无动力柔性外骨骼、澳大利亚DST 的OX 无动力柔性外骨骼、俄罗斯的JSCGB 工程公司的K2 被动柔性外骨骼系统,以及美国洛克希德马丁公司的FORTITS 等。我国在单兵无动力助力机器人研究方面也取得了一定的成果,近日我国某单兵无源助力机器人已在海拔5 000 m 的西藏阿里地区进行了试验测试,能为战士在高原负重巡逻中提供一定程度的助力。
国内外单兵无源助力机器人,虽然取得了不错的成果,有的还在野外环境下进行了测试,但是大都用于单兵负重,真正能满足高原、山地、丛林、城市等复杂地形环境作战的并不多。为此,亟需对功能完善的单兵无源助力机器人进行研究,以满足未来野战行军、高原巡逻、山地/城市作战等特定军事任务,增强士兵体能、减少人体代谢消耗、减轻和预防士兵损伤,为新一代单兵综合系统提供高效的局部关节和全身助力解决方案。本文以实际军事应用需求为牵引,从设计要求入手,设计了一款适合单兵功能齐全的无源仿生助力机器人,能为单兵提供有效的助力、防护,并且不影响单兵的战术动作。
1 单兵助力机器人仿生设计
以人为中心,以战术任务完成为根本,从功能需求出发反演推断进行设计,在满足生理尺寸的基础上进一步研究匹配运动自由度和可达范围。为实现单兵战术动作,整套单兵无源助力机器人采用仿人设计,共有40 个自由度配置,其中,肩部承重支撑护板具有1 个俯仰自由度配置。仿生脊柱串联椎骨结构,各椎骨间采用长度可调式钢管结构,每个椎骨具有3 自由度(共计24 个自由度),分别是实现背部前后运动、左右运动、旋转运动。腰部滑环与单侧髋关节配合具有5 自由度特征,分别是:腰部宽度自动调整自由度、腰带的腰部随形自由度、髋关节内旋/外旋自由度、髋关节屈/伸自由度、髋关节外摆/内收自由度等。单侧膝关节具有2 自由度特征,可完成膝关节屈/伸的转动、矢状面的滑移。单侧踝关节具有3 自由度特征,可完成踝关节的屈/伸、内旋/外旋、外摆/内收等动作。
单兵助力机器人是一种灵巧性仿生机械结构系统,系统在人机运动适应性、协调性、轻量化、承载能力等之间存在先天矛盾,需要采取各种技术手段予以平衡和化解。为降低士兵负重时体能消耗、保护骨骼肌肉免授损伤,设计了无源助力机器人样机,如下页图1 所示,该样机人机功效好,适应性强,具备关节保护功能和模块化挂接接口并能与单兵综合系统有效集成。

图1 单兵助力机器人
单兵助力机器人主要由仿生灵巧型机械结构组成,主要包括负载挂接接口、仿生脊椎块、胸部支撑、腰部滑环、腰部弧形导轨、长度补偿型髋关节、四边形铰链式膝关节、空间异形薄壁大小腿、身高调节机构、支撑保护型踝关节等组成,系统组成如图2 所示。单兵助力机器人重量小于4.5 kg,可承载40 kg 的额定负荷,并能达到60%的平均助力承载效率;人机工效好,适应性强,不影响单兵战术动作。该机器人特点明显,主要体现在:1)具备脊柱、膝关节、踝关节等部位的支撑保护功能;2)备挂接模块化防护组件的功能;3)能与单兵综合系统有效集成(含前胸后背防弹板及单兵战术背包);4)胸背部具有将挂接载荷重量通过支撑结构传递到助力机器人构架上的能力;5)系统机构采用免工具调节与快拆快装模块化设计。

图2 单兵助力机器人组成框图
1.1 变刚度柔顺仿生脊柱的设计
单兵助力机器人为适应人的生理特点,脊柱采用了变刚度的柔顺设计,如图3 所示,一方面可实现负重力外传递,另一方面脊柱关节所提供的附加自由度能够产生更加灵活的运动形式。弹性材料受到轴向压缩时,其刚度会发生变化,根据弹性材料的这种力学特性,设计了一种由刚性材料和弹性材料相互串联组成的可变刚度脊柱结构,这种可变刚度结构类似于人的身体结构中由刚性椎骨和弹性椎间盘组成的脊柱。在可变刚度脊柱结构中设计有弹簧、支撑件和弹性体,串联在一起。做弯腰动作时,可变刚度脊柱结构中的弹性材料受到轴向压缩,从而增加了可变刚度脊柱结构的弯曲刚度。反之,当外负载撤销时,可变刚度脊柱结构的弯曲刚度又会减小。因此,根据负载重物重量的不同,脊柱内的弹性体会发生不同程度的变形,进而调节脊柱的弯曲刚度。椎骨采用仿人体椎骨结构,中间有孔用于安装脊柱,两侧由留有穿绳孔用于多节椎骨的而连接,内侧中心设计有圆弧结构为人体脊柱让位,两侧边翼为平面结构与人体竖脊肌贴合。为实现对人体胸部的保护,在椎骨的基础上设计了胸部支撑锥块。胸部支撑锥块与胸部支撑件可组成封闭环形结构,在匍匐、趴、卧等状态下为人提供支撑力。
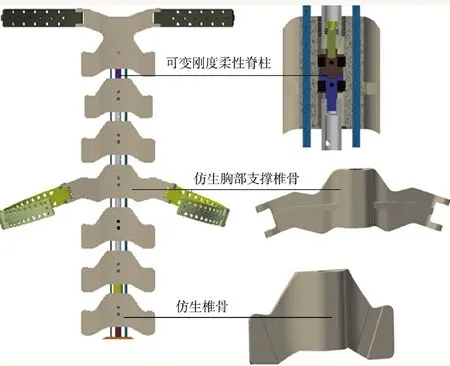
图3 仿生脊柱结构示意图
1.2 仿生关节的设计
1.2.1 长度补偿型髋关节
髋关节是由一个球形股骨头与凹形的髋臼组成的杵臼(球窝)式滑膜关节,是典型的三轴关节或称多轴关节,具有3DOF,即可在3 个相互垂直的运动轴上作屈伸、收展、旋转等多方向的运动,是全身位置最深的关节,构造既坚固又灵活,将躯干的重量传达至下肢,具有重要的负重和活动功能。伸屈活动时,股骨头沿横轴在髋臼内旋转,但大腿内外旋转时,是以股骨头中心至股骨踝间凹连线作为其活动的轴心。因此,股骨头在髋臼内还有极为微小的滑行。髋关节的活动受到肌肉韧带限制,其运动范围如下:前屈130°~150°,后伸10°~15°,内收20 °~30 °,外展30 °~40 °,外旋40 °~50 °,内旋屈髋时为40°~40°。为适应人体髋关节的运动,髋关节设计了3 个自由度,如图4 所示。

图4 长度补偿性髋关节结构图
人体站立状态和摆腿状态下髋关节骨头旋转点是不一样的,或者说人体腿部从竖直状态到摆动状态髋节骨头发生了滑移,髋节的旋转中心发生了转变,外骨骼系统髋关节旋转中心和人体的髋关节旋转中心将会不重合,这将会导致外骨骼系统与人体的贴合性变得很差,更有甚者会导致应力集中,大大地影响了穿戴外骨骼系统的舒适性,为此在髋关节处设计了腿长补偿机构。腿长补偿机构是髋关节的一部分,当向外摆动腿时,外骨骼系统的机械腿在摆动件的带动下沿着导向圆弧面向上运用,从而补偿人体腿长的变化量。
1.2.2 四边形铰链式膝关节
膝关节由股骨下端、胫骨上端和髌骨构成,是人体最大最复杂的关节,属滑车球状关节,能作屈伸运动,屈可达130°,伸不超过10°。在屈膝状态下,可作屈位微小的旋内、旋外运动。在正常步行中,由于屈膝幅度不会很大,屈位微小膝关节的生理结构也是球状关节,严格讲属于球副,只是由于膝关节韧带绷紧的原因,只能在矢状面运动。实验表明,膝关节运动是矢状面内的旋转与滑移的复合。
由膝关节的运动属性可知,在建立与下肢运动功能相近的刚体骨骼模型膝关节除具有转动自由度外,关节的瞬时转动中心还与关节转角有确定对应关系的滑移运动。因此,在骨骼模型中不宜直接采用单自由度转动关节对膝关节进行运动等效。可行的方法是借鉴人体下假肢膝关节的设计技术,根据生物膝关节转角与其瞬时转动中心轨迹的对应关系,通过构型与相关参数的优化,设计出与人体膝关节运动功能相近的膝关节机构,如图5 所示。所设计的四边形铰链式膝关节能较好地匹配人体下肢膝关节的运动,提高了助力机器人与穿戴者的贴合性,增加了舒适度。
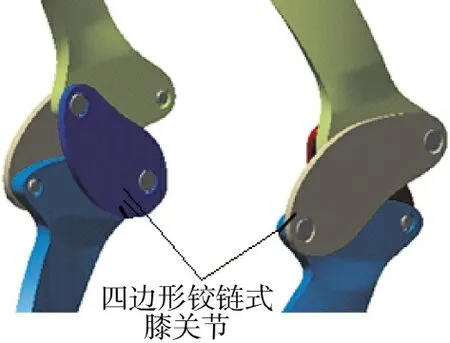
图5 四边形铰链式膝关节结构图
1.2.3 并联双助力踝关节
踝关节机构主要是由鞋托、U 型传力架、鞋托销轴、限位件、小腿调节杆和U 型传力架销轴等组成,如图6 所示。在穿戴时,穿戴者首先穿上鞋托,通过快速旋钮绑缚住穿戴者的鞋;然后将小腿调节杆插入小腿孔中,调整好尺寸,通过凸轮旋钮快速将调整杆锁紧。当负重时,小腿机构承担的力通过调节杆传到销轴,然后由铰轴经U 型传力架分两路传到鞋托,进而将力传导到地面。

图6 踝关节结构与装配示意图
1.3 功能性结构的设计
1.3.1 身高自适应调整机构
为适应不同身高的穿戴者,单兵助力机器人的大小腿长度需要作调整。大小腿长度调节机构均采用了模块化、免工具的设计,提高了调整的快速性。大腿长度调节机构如下页图7 所示,采用了齿形配合的结构形式,通过旋钮调节大腿与调节件的位置可实现大腿长度的调节。小腿长度调节机构如图8所示,采用了套管与杆件通过锁紧装置来改变杆件在套管内的相对位置,通过锁紧装置可实现小腿长度的调节。

图7 大腿长度调节机构结构图

图8 小腿长度调节机构结构图
1.3.2 轻量化包裹式支撑腿
单兵助力机器人为了增强穿戴的舒适性、贴合性、防护性,大小腿采用了包裹式机构设计。根据大小腿主要肌肉的走向,在不影响穿戴者动作的前提下设计了包裹式大小腿结构,如图9 所示。该结构为空间异形薄壁件结构,采用常规的三维实体建模软件设计比较繁琐,且很多结构特征难以实现。为了提高设计效率,提高零件的设计精度,采用了三维工业设计建模软件Rhino 与三维实体建模软件Inventor,联合完成了大小腿的包裹性设计。

图9 包裹性大小腿结构图
所设计的单兵助力机器人整体采用人体三维仿形设计与轻量一体化设计,可实现有踝、膝、髋关节屈伸、腰部转动、脊柱弯曲及转动等动作。优化的传动装置可使士兵完成匍匐前进和下蹲等动作。助力机器人背部设计了一个背负装置,使肩膀的负重均匀地分散到士兵其他部位,减轻负重力。通过巧妙的设计,士兵穿戴这套助力机器人后能够背负重达40 kg 的背包执行任务。由于不需要任何电源,在执行任务时很安全,也方便士兵对它进行维修。
2 关键零部件有限元分析
2.1 助力原理分析
负外负载行走状态下的示意图如图10 所示,在图中红色剪头代表外负载力的传递路线,绿色箭头表示人机交互力。外负载力通过负载挂接接口将力传递到脊柱上,脊柱在外力的作用下由“柔”变“刚”将力传递到腰板上,力的方向发生变化,经由腰部机构和髋关节传递到大腿上,再通过膝关节四边形铰链式膝关节传递到小腿,最终通过踝关节结构件将力传递到地面上。

图10 背负外负载负载行走状态力传递示意图
行走时,一条腿处于支撑相用于传递负重力,另一条腿处于摆动相。负载力向下传递经大腿传递到小腿时,大腿的结构将传力路径一分为二,由于单腿膝关节采用内外侧四边形铰链式结构,处于支撑相的腿每个四边形铰链式结构传递二分之一的负载力,并作用在小腿上,由于小腿的结构将传力路径由二合一,最终实现通过踝关节传递到地面。在向下传递负载力的同时,纵向力会有一部分转换为肩带、腰带、大小腿绑缚带的水平压力,由于各处绑带采用了大幅面包裹式设计,能将水平压力分布在穿戴者的各部位,消除了穿戴者某一部位受力过大产生的不适感。
2.2 柔性脊柱第一脊椎受力分析
第一脊椎是仿生脊椎的第一节,承担着前部和背部外部任务模块和背负载荷的作用,其上的左右两侧耳轴是主要的受力部位。对其进行多种模拟载荷下的分析是脊柱功能完整的保证。
有限元分析时,将建立好的三维模型另存为igs通用格式文件导入到有限元软件ANSYS Workbench 中,对椎体进行材料属性的定义网格划分时采用自动网格划分法,并设置Relevance 为100,设置Relevance Center(相关中心)为Medium(中等),划分好的有限元网格模型如图11 所示。

图11 第一脊椎块有限元模型
在对第一脊椎块进行仿真分析时,结合实际第一脊椎块的受力情况,将模拟椎体挤压载荷、模拟椎体前屈载荷、模拟椎体扭转载荷、模拟左右耳轴载荷等载荷同时施加到椎体,具体载荷设置如图12 所示。
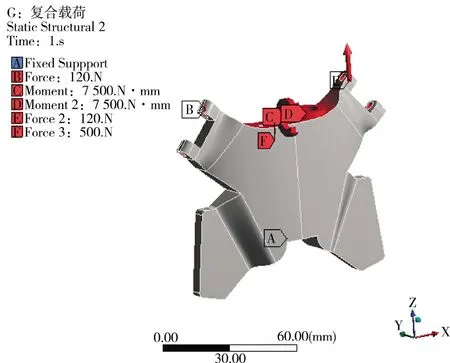
图12 模拟椎体复合载荷边界条件
通过有限元分析求解,得到的第一脊椎块变形、应力云图如图13 所示。

图13 椎体的应力分布云图
通过有限元分析求解,椎体的最大变形量发生在耳轴部位,最大变形为0.03 mm,最大应力值为21.4 MPa。通过上述分析椎体的变形和应力满足设计的强度和刚度要求。
2.3 下肢静力学分析
对单兵助力机器人施加约束,约束为单兵助力机器人下肢固定约束,即是在单兵助力机器人与地面接触的部位施加固定约束。单兵助力机器人固定约束施加与人体下肢在一个正常步态周期内各个位姿下的脚与地面接触部位相同载荷加载。
2.3.1 大腿有限元仿真
模拟足跟着地时载荷:足跟着地时,左脚脚尖处和右脚脚跟着地,在左右髋关节上各施加1 000 N的垂向力,保留其沿着销孔处的转动,如图14 所示。

图14 大腿有限元模型
在设置完约束和载荷边界条件后,经过ANSYS Workbench 进行计算得到应力值,其分析结果如图15 所示。

图15 大腿的应力分布云图
通过有限元分析求解,椎体的最大变形量发生在挂齿处部位,最大变形为0.56 mm,最大应力值为231 MPa。通过上述分析大腿的变形和应力满足设计的强度和刚度要求。
2.3.2 小腿有限元仿真
模拟足跟着地时载荷:足跟着地时,左脚脚尖处和右脚脚跟着地,在左右髋关节上各施加1 000 N的垂向力,保留其沿着销孔处的转动,如图16 所示。

图16 小腿有限元模型
在设置完约束和载荷边界条件后,经过ANSYS Workbench 进行计算得到应力值,其分析结果如图17 所示。
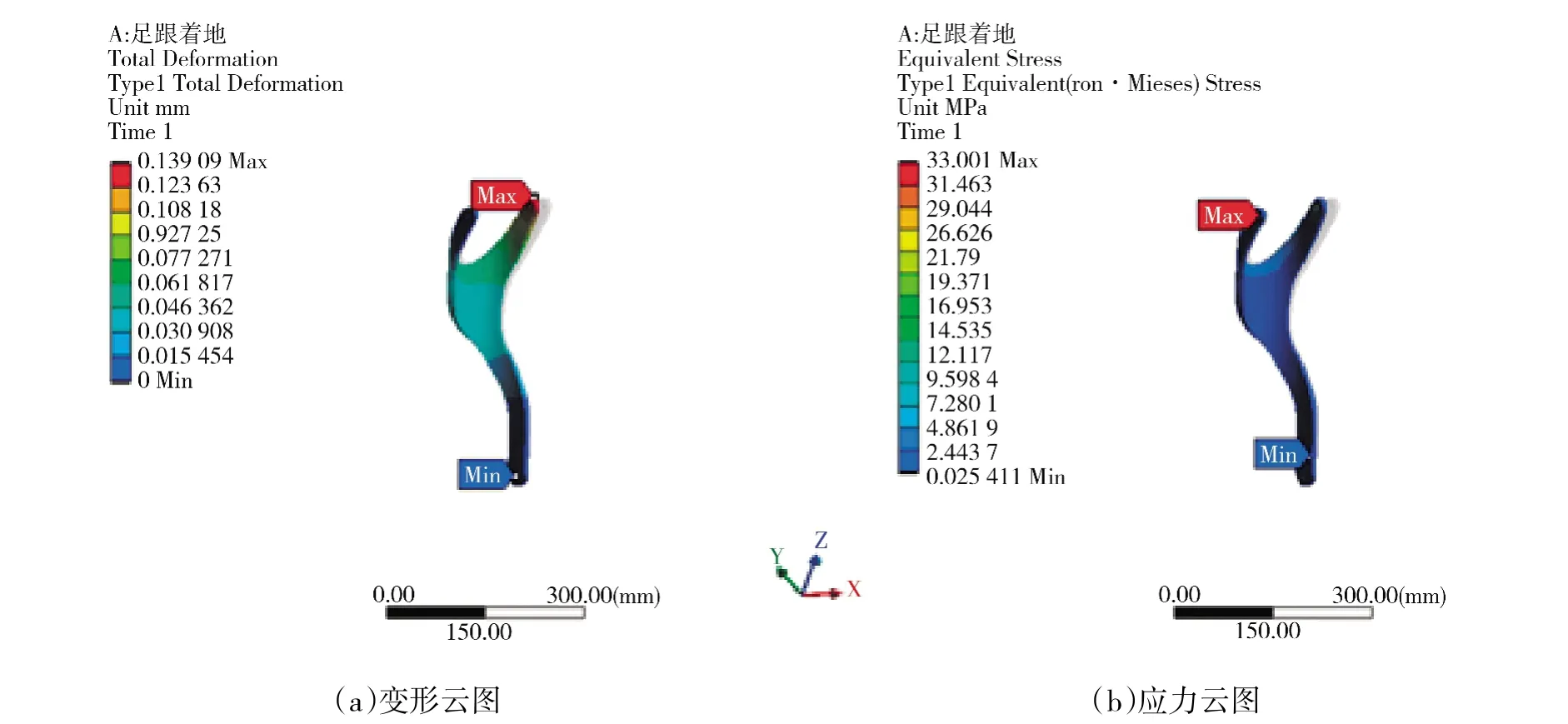
图17 小腿的应力分布云图
通过有限元分析求解,椎体的最大变形量发生在膝关节连接销部位,最大变形为0.14 mm,最大应力值为33 MPa。通过上述分析小腿的变形和应力满足设计的强度和刚度要求。
3 单兵助力机器人的应用前景
单兵助力机器人能在不同的应用场景,在城市、高原、山地等复杂地形环境作战中对士兵机动性及体能进行增强,并为新一代单兵综合作战系统增加体系贡献率,保持单兵装备技术竞争总体优势,具体可在以下的场景中应用:1)高原山地丛林环境单兵后勤物资装备补给,高原边防巡逻单兵携行辅助助力,抗震抢险车辆无法通行地段的重要物资运输保障,嵌入防化、防核辐射服减轻人员劳动强度等。2)高原山地长时间、长距离的边防巡逻,高频度的联合演习和高强度实战化的训练对士兵进行有效保护和防护,高强度长时间的城市维稳、处突防爆的武警特战、战场救援等。3)公路、铁路沿线军需站的物资人工搬运辅助助力,弹药仓库小批量物资的人工搬运辅助助力,试验场/靶场弹药发射试验的物资搬运辅助助力,中大口径牵引式火炮装填辅助助力、飞机挂接导弹助力、盾牌挂接助力等。4)战伤人员的快速转移、长时间的手术协助、医疗卫生用品的快速补给、需要背负或搬运的其他场景等。5)现代化战场环境下综合作战,通过单兵助力机器人可以让士兵有效地配备防护系统、武器系统、数字化战场系统,以加强步兵战斗力和防护性。同时,步兵在作战中需要根据战场态势的变化,及时利用有利地形隐蔽和伪装自己,提高奔跑、跳跃、攀爬等快速运动能力,对敌实施有效打击。
总之,单兵助力机器人在单兵作战方面要减轻士兵负重感、提升行走速度、降低体能消耗、提升救护效率,增强单兵作战效能;在作业方面要降低士兵的劳动强度、提高作业效率、降低作业风险,增强单兵作业效能。
4 结论
本文从应用场景需求、设计指标要求及助力原理出发,设计了一种无动力单兵助力机器人,通过仿生、轻量化及功能化的设计,保证了所设计的单兵助力机器人满足设计指标要求。通过对单兵助力机器人进行有限元分析,仿真结果可以看出强度完全满足40 kg 重物背负的要求,并且还有进一步优化改进的空间。无动力单兵助力机器人无需外部能源,能够满足长时间的使用需求,运用生物力学和人体运动负重机理,通过机械杠杆将士兵负重转移到身体上的合理位置,能够协助士兵在战场上携带更多的装备而不影响士兵的战术动作,应用场景广泛,对提高单兵综合作战效能具有重要意义。
