基于CT 3 维图像引导下经皮肺穿刺机器人系统综述
2022-07-24王震陈书海孙华民张芮朱步兵张炜
王震 陈书海 孙华民 张芮 朱步兵 张炜
(安徽百诺佳医疗科技有限公司,安徽黄山,245000)
0 引言
一般而言,Interventional Radiology(IVR)介入放射学指的是:在医学影像设备的图像引导下,采用穿刺针或导管,经过人体皮肤或人体自然腔道,直接到达患部对病灶进行诊断或治疗的一种临床医学处置方法。IVR 是一种微创低侵袭治疗方法,不需要采用通常的外科开刀手术,能够仅仅对病灶部位进行正确的检查或治疗,所以具有减少患者负担、加快术后恢复、缩短病人住院时间、降低医疗费用、减少术后粘连和感染等优点;即使该病灶再次发生病变,也能再次进行治疗;再者,治疗时只需采用局部麻醉,有利于对危急病人的麻醉管理,尤其适用于针对老年病人的治疗,同时也能减轻医护人员的身心负担和工作强度。所以,针对体内多种疫病,特别是对身体各部位的肿瘤,医师大都建议选择这种治疗方法。
1 传统穿刺技术
医学影像设备主要指的是X 射线、超声、CT、MRI等医学影像设备,医学影像设备自带显示扫描医学图像的显示屏,可供医师观看病灶的解剖学状态。
医学临床穿刺治疗由来已久,是由施术者一边观看影像图形,一边徒手进行穿刺。其大致有两种情况:一种是扫描和穿刺同步进行,在扫描的过程中进行穿刺,施术者一边观看放在CT 扫描仓旁边的影像显示屏,一边徒手拿着穿刺针给患者进行穿刺。这种穿刺治疗过程比较短,但是施术者执针的手臂伸进扫描仓,尽管穿着含铅的防护服,也难完全避免X 线的辐射(如图1 所示)。另一种情况是扫描和穿刺异步进行,每当需要对患者进行扫描时,施术者等医护人员必须离开CT 机房间,到另外一间放置影像显示屏的房间,观看此时穿刺针与体内各组织或病灶之间的位置角度关系,在停止扫描后再进入CT 工作间进行穿刺,在整个治疗过程中,医师往往需要往返几十次,大大延长了治疗时间,给患者和医护人员带来许多非治疗性的负担。
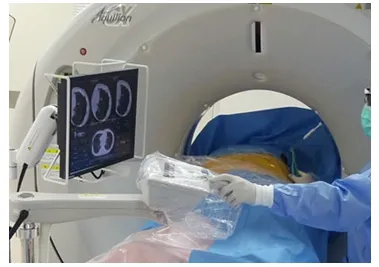
图1 徒手穿刺场景
2019 年国家癌症中心发布了最新一期的全国癌症统计数据。报告显示,2015 年全国恶性肿瘤发病约392.9 万人。从发病人数看,肺癌位居我国恶性肿瘤发病首位,发病人数为78.4 万人。对此,采用微创低侵袭穿刺手术早期诊断和治疗肺癌是亟待解决的重大医疗课题。此外,肺部癌症治疗中的活检、引流、消融等医学处置大多采用CT 引导下的经皮肺穿刺术,所以,从事医疗器械研发和生产的企业专注采用先进的机器人技术,研发基于CT 3维图像引导下经皮肺穿刺机器人系统,用机器人代替医师对患者进行穿刺操作,医师只需在隔离室观看影像图像,对穿刺机器人进行远程控制,就可以完成整个穿刺治疗过程,从而解决当前肺部穿刺中存在的问题(如图2 所示)。

图2 用机器人进行穿刺
2 基于CT 3 维图像引导下经皮肺穿刺机器人系统
CT 3 维图像引导下经皮肺穿刺机器人系统由CT 医学影像设备、穿刺机器人、主从机器人控制系统和相应的控制处理软件组成。
CT 医学影像设备可以用医院现有的CT 扫描机,具有扫描仓和乘载患者的床位。扫描时生成多幅断层数据,这些数据传送到设备自带的显示屏幕上,还可以经过专用图像处理软件生成3 维动态图像。
穿刺机器人是穿刺的执行者,安装在台车上;台车下边有滚动脚轮,旁边安装有把手,方便在CT 扫描室内被自由推动。机器人本体由多关节机械臂、穿刺针夹持机构组成,接受控制器的控制,对患者进行穿刺操作。为使穿刺针能够以任意位置和任意角度对患者病灶进行穿刺,该机器人的机械臂要求具有6 个自由度;为使穿刺针能够在狭窄的扫描仓内活动自如,机械臂和穿刺针夹持机构必须结构紧凑;为使进入扫描仓内的部件在扫描时不产生伪影,凡需要进入扫描仓内的部件,除穿刺针以外,均不得采用金属材料;另外,在穿刺针的机械臂上还安装有检测穿刺动作的力传感器。
控制器设备放置在另一个房间,或含铅玻璃的隔离屏外,以避免施术者受到X 线的辐射。穿刺机器人的控制采用主从式控制方式,从动设备是穿刺机器人,主动设备是放置在显示屏前的手动控制手柄。穿刺时,施术者一边观看显示屏上的图像和有关信息,一边操作控制手柄远程控制机器人对患者进行穿刺;显示屏带触摸功能,分为多个显示区域和功能按钮,用于对多种控制模式的设定和切换;手柄控制器类似游戏机的控制手柄可对机械臂6 个自由度进行控制。
穿刺机器人的工作场景如图3 所示。

图3 穿刺机器人的工作场景
3 穿刺路径规划和位置调整
穿刺路径指的是从选择的体表起始点到病灶目标点之间穿刺针行进的路线。在穿刺前,基于事先对患者CT 扫描获取的医学影像,根据所发现的病灶的位置、形状、大小和所处的组织环境,确定体表穿刺针的刺入起始点;起始点到目标点的路径既要避开穿刺行进的障碍物,例如骨骼等,又要避开关键的组织部位,例如动脉血管等,并且使穿刺的行进路线最短。
可以事先在3 维医学影像上进行模拟,以确认最优的穿刺路径。但由于肺部不停地呼吸使得病灶的位置在不断变化,再加上穿刺针在行进过程和各层组织的作用和反作用力,使穿刺针在行进过程中发生挠曲形变,不能按原来规划好的路径行进,所以在穿刺过程中仍需要不断地调整穿刺针的行进路线,以跟踪变化的病灶。
4 穿刺机器人的安全设施
医疗器械对安全的要求非常严格,穿刺机器人也不例外。机器人的操作分为定位模式和穿刺模式,在定位模式时,不允许驱动穿刺针的机构产生动作,以免误操作给患者造成创伤;在控制手柄功能按钮的设置上,首先应尽量考虑施术者的方便,使施术者不易产生误操作,同时对快速穿刺工作设置双击按钮操作;在穿刺针夹持器上,设置有紧急停止机构,一旦出现断电或其他需要立刻停止穿刺操作时,施术者能以最快捷的方式使穿刺针夹持机构放开穿刺针。另外,在设计控制程序时,设置限位数据,以控制穿刺针在各个方向上的行程。
5 穿刺机器人发展趋势
目前穿刺机器人系统已经出现了一些样机,例如美国的AcuBot 和日本的Zerobot,国内北京理工大学和解放军医学院等也有研发的样机。但是,样机穿刺诊断和治疗的全程仍然由施术者操作,由于在穿刺过程中要反复地观看影像图形和不断地调整穿刺针的位置和角度,所以整个治疗时间还是相当长的。其实真正用于穿刺和治疗的时间非常短暂,大部分的时间都是用在反复调整穿刺针行程的动作上,所以,研究人员还需要进一步提高穿刺机器人的操作性能,着力研究穿刺过程中体内各层组织以及病灶在穿刺针刺激下的活动机理,研究穿刺针在通过体内各层组织以及病灶时产生挠曲的力学特征,通过反复实验和试错,找到更合理的解决办法,使穿刺机器人逐步走向半自动化和自动化,以快速和精准的医疗为人类服务。