基于移动激光扫描的地铁盾构隧道竣工验收测量
2022-07-23曹久久陈汭新
曹久久,陈汭新,刘 昊
(1.佛山市测绘地理信息研究院,广东 佛山 528000;2.同济大学测绘与地理信息学院,上海 200092)
0 引 言
地铁盾构隧道竣工测量包括隧道轴线平面偏差、高程偏差、椭圆度测量以及纵横断面测量等,以确保隧道衬砌结构、轴线位置、管片位置等符合相关设计要求。传统的竣工测量方法主要为全站仪解析测量,在隧道贯通后以始发和工作井内的控制点为起算点,对隧道内的导线点和水准点分别重新组成附和路线或附和网,这种测量方法存在检测手段落后、劳动强度大、工作效率低等问题[1]。
随着科技水平的不断提高,多种新型测绘技术发展迅速,其中激光扫描技术能获得物体表面的大量坐标数据和激光反射率等信息,快速复建物体轮廓,生成物体的灰度或深度图像等,具有速度快、精度高且受天气变化影响小等优势,正逐渐应用到大型工程领域[2-3]。
在地铁隧道投入运营前进行三维激光扫描获得隧道内详细的三维信息,目前已经逐步得到了各地轨道交通管理部门的认可。三维激光扫描一方面可以为运营期的变形观测提供基准资料,另一方面可以对施工期的质量进行合理的评定,便于界定建设和运营期间的相关责任[4-7]。移动激光扫描系统作为一种新型综合测量技术,已经逐步应用于全国多个城市的城市轨道交通竣工验收测量。王博群等对隧道点云数据的空间拟合展开了研究,结合绝对坐标可以准确的提取断面中心的三维坐标[8]。曹先革等利用全站仪采集的外业数据对点云断面数据进行验证,分析了三维激光扫描技术在地铁隧道断面测量中应用的可行性[9]。夏春初等将三维激光扫描仪应用于地铁竣工测量,构建了点云三维建模对地铁车站进行可视化展示和空间分析[10]。
本文采用自主研发的隧道移动激光扫描系统——Tlsd隧道移动激光扫描系统,根据《盾构法隧道施工与验收规范》要求,解算获取隧道逐环的水平直径、椭圆度、环内和环间错台、隧道内壁影像和表观病害缺陷等,用于地铁隧道施工期的监控量测、竣工测量以及运营期的监护测量。
1 移动激光扫描系统
1.1 硬件集成
移动三维激光扫描系统的主要硬件包括激光扫描仪、电动检测车、控制平板电脑、便携式锂电池,该系统可以兼容多种搭载平台,如图1所示。移动激光测量系统中激光扫描仪一般采用二维断面模式工作,直接获取的点云数据是二维螺旋线数据,如图2所示。该系统通过电动检测车实现对隧道进行自动检测,有效提高了外业检测的工作效率。

图1 移动激光扫描系统硬件图
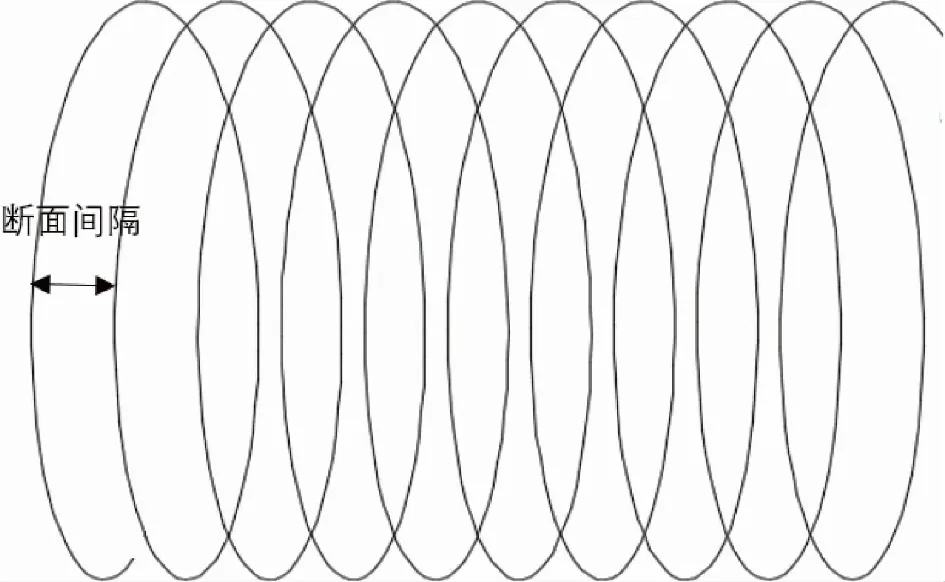
图2 移动激光扫描原理图
三维激光扫描仪的类型是Z+F 9012断面仪,扫描视野为360°,最远扫描距离可达119 m,最高扫描频率为200 Hz,每秒可采集101.6万个点。工业平板用于系统中仪器的集成控制,具有防水、防震、供电时间长等优势,能保证系统在恶劣环境的高稳定性要求。轨检小车可根据扫描环境和精度要求选择合适的运行速度,配有的遥控器能够实现在一定范围内远程控制小车。
1.2 软件介绍
Tlsd隧道移动激光扫描系统具有兼容多类型扫描仪、并行计算速度快、适合多种应用场景、成果文件开放等优点,依照现行的相关规范,可获得测量对象的空间坐标、几何尺寸、正射影像、变形数据、漫游视频等丰富成果,满足铁路(地铁)的隧道、线路、站台等快速高效综合检测的需求。该系统适用于单圆盾构隧道、马蹄形、矩形等多种隧道类型。软件可以实现二/三维点云同步显示,采用强度、高度等进行点云渲染,让用户能够直观地浏览三维场景,如图3所示。
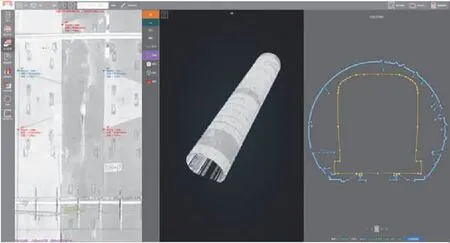
图3 点云数据查看界面
定制开发了地铁标准限界图、定距导出高度横距、报表生成模板等功能,解算盾构环片的几何数据(椭圆度、水平直径、横向净空等)。
2 检测方法与原理
2.1 检测方法概述
采用移动激光扫描技术采集目标隧道的三维激光点云,经里程纠正、正射投影后生成隧道内壁正射影像,影像经过人工判读识别等处理步骤之后,获得隧道病害明细、病害专题影像图、三维点云以及漫游视频等检测成果,具体流程如图4所示。
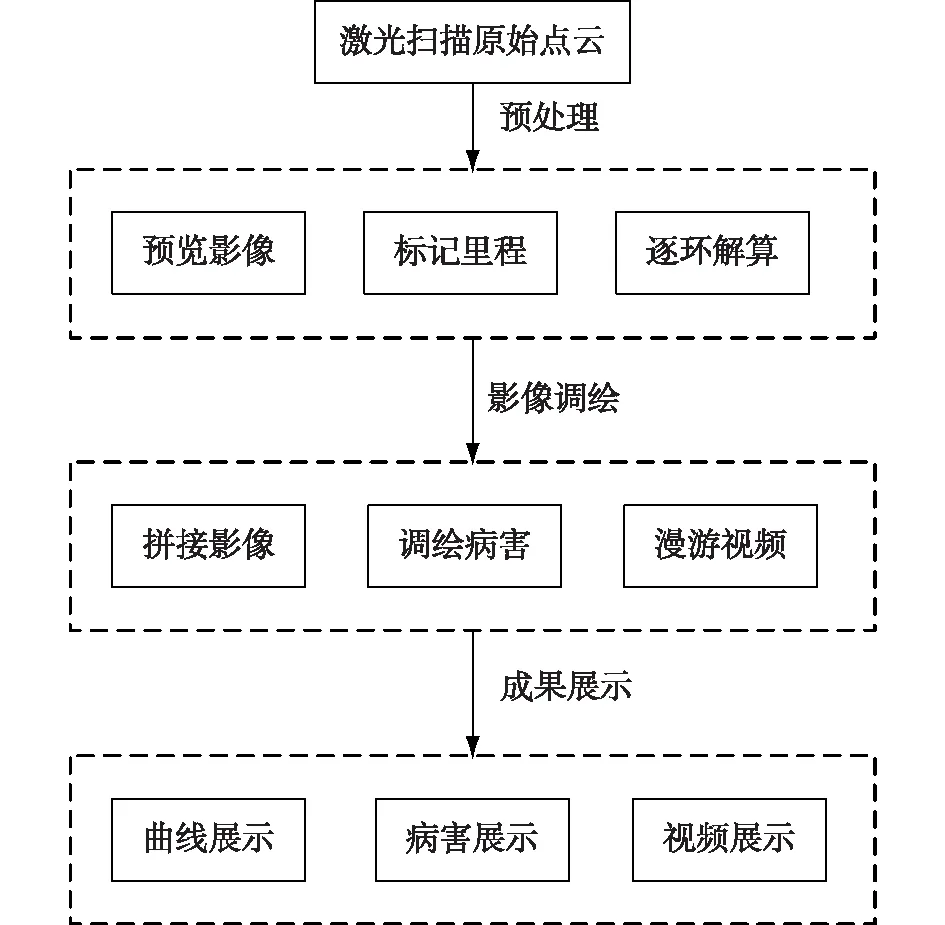
图4 TLSD系统数据处理流程
2.2 直径与椭圆度计算
由于隧道内壁已安装疏散平台、线缆、接触网等基础设施设备,存在较多的内壁附着物遮挡。为保证隧道断面收敛解算的精度、可靠性和与固定测线成果的一致性,采用如下算法进行隧道直径和椭圆度解算:
(1)输入管片设计分块数量和角度,自动识别管片分块位置,每环按照均匀间隔取5个扫描断面,单独进行下列步骤计算。
(2)断面点云整体拟合圆,利用最小平方中值法获得一套具有稳健性的拟合系数,从残差向量中找到异常值,把产生异常值所对应的粗差点剔除,再利用最小平方中值法拟合得到最优拟合效果,并求解圆心坐标(x0,y0)。
(3)拟合椭圆需要与隧道实际内轮廓贴合,避免因道床遮挡、下部点云过于密集等造成短轴拟合值过小,利用最小二乘法对每个横断面进行断面线的拟合得到椭圆方程的5个系数,计算各断面对应的椭圆方程各项参数,包括圆心坐标以及椭圆的长、短半轴,并以椭圆中心为原点,在水平方向上搜索断面点,并将两个断面点的距离作为该断面的收敛直径[11-13]。
(4)隧道断面的椭圆度能够表示隧道断面经过变形之后与椭圆的接近程度,椭圆度越大表示隧道的整体形变越大[14-15]。若两侧弧段拟合时遇到较多遮挡时,取圆心水平位置±1.0 m范围内的非粗差点进行弧段拟合,然后求取交点作为直径,此时根据遮挡比例计算可靠度。
(5)完成上述步骤后,若选取的扫描断面所计算的直径差值离散度未超过限差,则取环中间位置的扫描断面求解的椭圆度作为该环测值,否则取剔除最大最小值后的中间断面计算该环椭圆度。针对极少数因严重遮挡、联络通道等原因造成的粗差,需要人工检查复核取值,并在成果报表中进行备注说明。
2.3 限界计算方法
参照《地铁限界标准》(CJJT96-2018),检测区域内的建筑限界计算适用基准坐标系、计算方法、计算公式和适用参数取值定义如下:
(1)基准坐标系(《地铁限界标准》2.1.5,3.3.2)。垂直于直线轨道线路中心线的二维平面直角坐标系。横坐标轴(X轴)与轨道中心线垂直,纵坐标轴(Y轴)垂直于设计轨顶平面,该基准坐标系的坐标原点为轨距中心点。建筑限界的坐标系在曲线超高地段应采用直线地段的基准坐标系,不应随超高角旋转。
(2)建筑限界计算(《地铁限界标准》3.3.1)。建筑限界与设备限界之间的空间应根据设备和管线且包含变形预留值后所需的安装尺寸、安装误差值、测量误差值和结构施工允许误差值确定。任何沿线永久性固定建筑物,包括施工误差值、测量误差值及结构永久变形量在内,均不得向内侵入。
(3)选择衬砌环中间位置的点云数据,剔除隧道内壁附着点等粗差后计算指定高的左右横距。根据百米标和环片宽度推算里程值,导出逐环中心位置的断面限界图,如图5所示,标注4个高度左右横距,拱顶至轨道中心高度,以及B1型DC1500V车直线段标准设备限界轮廓。

图5 盾构隧道建筑限界测断面标注示意图
3 应用案例
采用Tlsd移动激光扫描系统和配套数据处理软件,对佛山2号线某区间进行了移动式三维激光扫描(图6),移动采集速度约1.8 km/h,获取了隧道内的椭圆度、收敛直径以及限界测量图。

图6 隧道内作业图
以环号为横坐标,椭圆度为纵坐标,统计的区间椭圆度曲线如图7所示。将两次采集的数据进行逐环检测,通过将检测的椭圆度进行逐环分析可知,区间内椭圆度变化明显的地方为隧道的出入洞口,与实际情况较为吻合,初步验证了成果的可靠性。

图7 隧道逐环椭圆度图
以环号为横坐标,水平直径为纵坐标,统计的区间水平直径如图8所示。为进一步验证激光扫描精度,将三维激光扫描得到的水平直径与设计值作比较,对比分析结果如表1所示。结果表明,水平直径测量值与设计值的差值在2 cm以内占98.7%,进一步验证了移动激光扫描的稳定性。

图8 隧道逐环水平直径图

表1 隧道水平直径与设计值差值分布情况表
4 结 语
本文采用自主研发的隧道移动三维激光扫描系统,详细介绍了移动扫描系统的软硬件组成、检测方法与原理,通过工程实际案例对激光测量的精度进行验证。结果表明,该方法检测信息全面、作业流程简单、测量效率和精度较高,为城市轨道交通竣工测量提供了更高效和实用的方法。
