无人机航摄作业关键步骤和发展趋势分析
2022-07-23殷立琼孙长奎潘九宝范雪婷
殷立琼,孙长奎,潘九宝,王 玮,范雪婷
(江苏省基础地理信息中心,江苏 南京 210013)
0 引 言
随着我国数字化城市建设的步伐日益加快,各行各业对高分辨率遥感影像的需求日益增大,对信息获取和更新速度提出了更高的要求。目前业务化运行的高分辨率遥感卫星影像一定程度上可以满足高分辨率影像获取的要求,但是基于卫星遥感的摄影测量方式受气象、地貌等条件的影响较为严重[1],有些地区由于常年没有合适的大气窗口而无法获得高分辨率卫星影像。传统航空摄影测量技术作为高分辨率影像获取的一种重要手段,对空域及气象条件有着严格的要求[2]。
无人机低空摄影测量技术是近几年发展起来的一种新型高分辨率遥感影像获取系统,有效地将无人机技术、航空摄影测量技术、通讯技术和定位技术相结合,在获取小范围和飞行困难地区的高分辨遥感影像方面具有明显的优势,已成为传统航空摄影测量手段和卫星遥感的有益补充,测绘产品精度得到了测绘行业的认可。
本文从数据获取与数据处理两个角度对无人机遥感技术应用的关键步骤和注意事项进行了阐述,对无人机航摄技术发展趋势进行了分析。
1 无人机低空航摄系统组成
无人机航摄系统是以无人机为飞行平台、以影像传感器为任务设备的航空遥感影像获取系统[3],主要由飞行平台、飞行控制系统、地面监控系统、任务设备、数据传输系统、发射与回收系统和地面保障设备六部分组成(表1)。
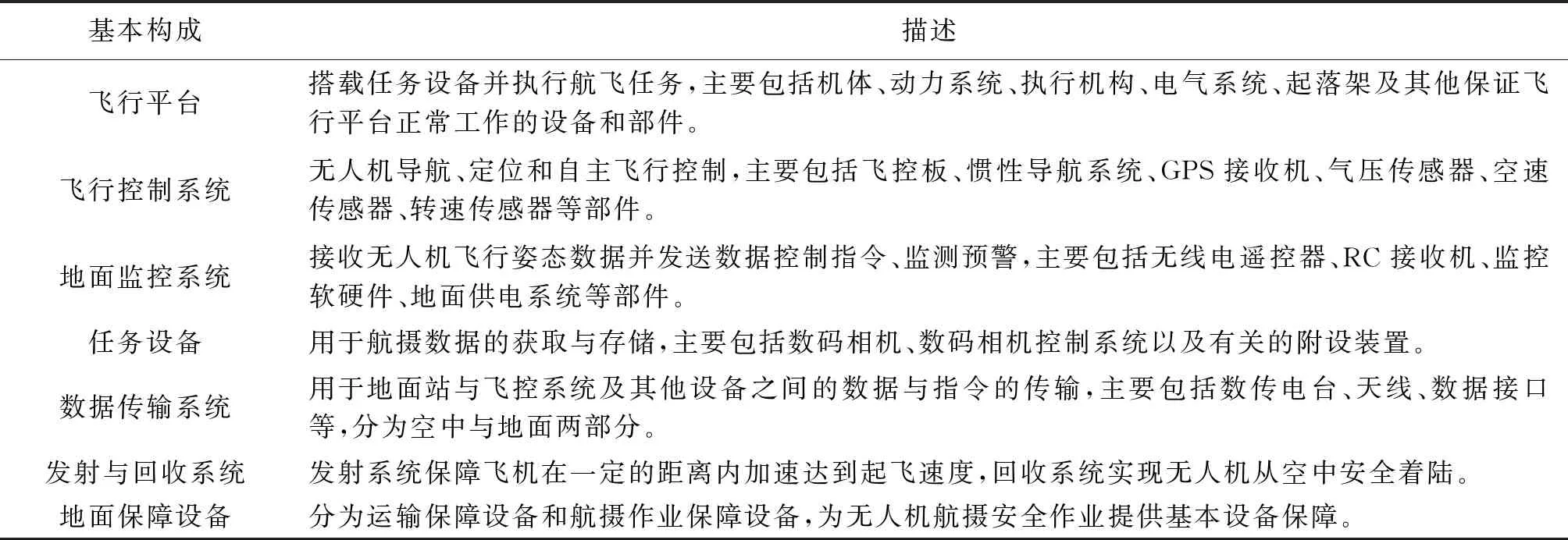
表1 无人机航摄系统基本组成及主要任务[3]
2 无人机航摄作业步骤分析
2.1 地面分辨率
《低空数字航空摄影规范》[4]给出了不同比例尺航摄成图条件下航摄地面分辨率的选择依据。但是,应用实践表明,依据该规范规定的航摄比例尺进行航摄作业,无法满足成图精度的要求[5],此外,无人机航摄过程中影像的像点位移、航摄高度的确定均与影像地面分辨率有关系[6],要提高航摄影像的判读精度,必须提高航摄分辨率,航摄分辨率的提高又会影响航摄作业效率。因此,根据航摄成图的要求,在兼顾航摄成图质量和作业效率的前提下,应在规范要求的基础上适当提高航摄作业的地面分辨率。
2.2 航摄重叠度
一方面,无人机航摄多搭载的为采用中心投影方式成像的非量测型相机,镜头畸变大,为了提高成图精度,应加大像片重叠度,采用像片中心部分的影像进行成图[5];另一方面,当重叠度大时,模型基高比就会变小,进而导致测图时高程精度降低,同时,重叠度过大会使航摄飞行效率降低、数据冗余增大。因此,在航摄重叠度设计时,要综合考虑影像用途、航摄天气、飞行平台稳定性等因素的影响[7]。
2.3 航线敷设方案
航线布设前,应综合研究测区的地形特征,当达到分区要求[4]时,要对航摄范围进行分区,每个测区单独布设航线。此外,由于无人机自身质量小、惯性小、受气流影响大,因此,在航线敷设时,应考虑当地季节性风向的影响,一般情况下按常规方案进行航线敷设,当季节性风较大时,应尽量沿着季节性风按顺风或者逆风的方向进行航线敷设。航线敷设时还要保证摄区边界覆盖的问题,一般要求在航摄区域四周至少外扩一条基线,对于无人机倾斜摄影,至少要外扩一个航高。
2.4 飞行平台
无人机航摄飞行平台是航摄安全作业的重要保障。飞行平台的选择应重点考虑航摄区域的平均海拔、天气状况、周围空管及人口情况,保障航摄安全,同时应考虑飞行器的设备搭载能力,以及对起飞降落方式的要求。
2.5 航摄传感器
无人机航摄系统搭载的多为非量测型相机,光学系统不稳定、镜头畸变大,因此,需要对非量测型相机进行检校[8],建立相机的成像模型,获取精确的相机内方位元素和畸变参数,对获取的光学影像进行畸变差改正。目前无人机相机多采用自检校的方法进行检校,该方法基于飞行的影像,采用匹配平差的方式检校出相机参数,但是,该方法需要进行影像间的匹配,受影像质量、地物类型影响较大,并且不同的航摄数据得出的相机参数不同。另外,市面上常见的相机畸变检校模型多是对同一张影像采用同一套畸变纠正参数,很难适应影像各区域畸变不同的特点,因此,尽量采用分区域相机畸变校正,准确的量化不规则相机的畸变信息,从而获得高精度的航测数据。
由于航测数据获取的特殊性,航摄过程中相机参数设置也是影响影像质量的重要因素。曝光模式选择快门优先,防止影像出现重影;曝光时间最好不超过1/1 000秒,有时用1/1 250,天气好、光照充足条件下,快门速度可以适当调快;ISO的设置最好不要超过800,昏暗场景时需设置高ISO,明亮场景需要设置低的ISO;光圈设置一般在4.5~9之间,根据经验设置5.6最为合适。
2.6 航摄实施
航摄实施过程中应选择最有利的气象条件,既要保证有充足的光照条件,又要避免有过大的阴影。同时,在航飞过程中,要密切关注天气变化及无人机的飞行姿态,当出现丢星严重或者飞机姿态不稳时,应立即停止飞行。
2.7 飞行质量与影像质量检查
飞行质量检查主要是检查像片重叠度、像片倾角、像片旋角、航线弯曲度以及摄区边界覆盖是否满足技术设计书的要求;检查POS数据是否与影像一一对应;影像质量检查主要检查影像的清晰度、层次的丰富性以及色差和色调的一致性;每天作业完成后要实时生成影像快拼图,检查航飞质量问题,当航摄中出现漏洞或影像不满足要求时,要及时进行补摄,所用相机应与上次航飞一致,补摄航线的范围要超出漏洞两条基线。
2.8 地面控制点布设与量测
像控点的布设是无人机航空摄影技术中影响测绘产品精度的关键步骤[9],布设方案的好坏直接关系到空三加密的精度。现阶段,低空无人机航摄按控制点布设方案的不同可以分为三类[10-11]:① 参照传统摄影测量的控制点均匀布设布设方案;② 稀少控制点布设方案;③ GPS辅助的免像控方案。均匀控制点布设方案是目前应用较为广泛的控制点布设方案,该方案航测成图精度较高,但是该方案需要较多的控制点,占用着大量人力物力及工期。免像控布设方案是近年来新出现的一种无人机航摄作业模式,该方案需要专门的航摄系统与对应软件的支持,对飞机姿态的控制、动态差分定位精度有较高的要求,能够满足小范围的大比例尺航摄,当用于大面积作业时无法达到精度要求。已有研究表明,采用四角点组布点外加内部少量布点的稀少控制点布设方案进行无人机航测能满足航测成图精度的要求。
2.9 PPK和RTK技术
为了减少像片控制测量工作量及后继工序的误差累积,应尽可能提高曝光瞬间像片的外方位元素精度。目前无人机航摄系统多搭载PPK(动态后差分技术)或RTK(实时差分技术)模块,该类型的模块能获得厘米级的精度,可减少外业像控点80%以上,能极大限度的提高航摄作业效率和成果精度。两种作业模式都需要架设基准站,基准站应架设在视野开阔、环境空旷、地势较高的地方,避免架设在无线电站、高压线、变压器等信号干扰区,同时避免在树荫下及大范围水域周围架设基准站。《全球定位系统实时动态测量(RTK)技术规范》[12]规定首先要保证基准站在静态模式下观测10~15 min,获得固定解,在不丢失固定解的前提下进行航摄作业,航摄完成后,基准站再持续观测10~15 min后方可停止。进行无人机航摄时,一般要把时间控制在30 min以上。
2.10 空中三角测量
空中三角测量是数据处理过程中的关键性步骤,结果直接影响产品的实际精度和准确度[13]。无人机航摄平台由于自身的特点,导致空三解算时需要大量的地面控制点来保证空三精度,大大增加了外业工作量,GPS辅助光束法区域网平差可以有效的解决低空摄影测量对地面控制点的依赖[14]。对于无人机航摄系统而言,由于没有搭载同步曝光装置,使得无人机拍摄时记录的相机曝光时刻与实际的相机曝光时刻存在延迟,现有的GPS辅助光束法区域网平差模型没有顾及到该曝光延迟误差[15],导致实际平差结果精度比理论估值低,无法保证最终平差结果的精度,很大程度上限制了无人机及其它低空平台在高精度量测领域的应用。张春森等[14]针对无人机摄影测量相机曝光延迟的问题,提出了顾及曝光延迟的无人机GPS辅助光束法平差方法,该方法在免像控无人机航摄系统中得到了广泛的应用。
3 发展趋势与挑战
3.1 法律法规健全与完善
作为新一轮科技革命和产业革命的产物,无人机航空摄影测量技术得到了长足的发展和应用,但是,大规模的应用也带来了诸多困境[16]。国务院、中央军委、民航局等部门相继出台了一系列的法律法规来保障无人机航摄技术的安全运行。相信随着今后法律、规范、制度的不断完善,无人机航空摄影技术一定能得到进一步的发展。
3.2 飞行平台与航摄传感器
随着无人机遥感技术的发展,市场上出现了各种型号的无人机航摄飞行平台,大多数飞行平台不乏高新技术的支持,但是,系统的平稳性、抗震性、载荷能力、续航时间、获取影像的质量等仍是航摄飞行平台普遍面临的问题[17]。因此,无人机厂商应在无人机的载荷能力、续航时间、高稳定性自主导航飞控系统等方面下功夫,生产出真正适合民用的高效无人机飞行平台。
由于无人机自身特性的原因,目前无人机搭载的多为非量测型单反相机,影像获取方式的单一性很大程度上限制了无人机航摄技术的应用。近年来,各种体积小、质量轻、精度高的传感器设备发展迅速,随着红外相机、高光谱相机、倾斜相机、激光雷达等传感器在无人机上的搭载和应用,无人机遥感信息获取技术将得到进一步的发展。
3.3 数据处理技术的完善
市面上的各种类型的无人机数据处理软件均能实现对无人机遥感数据的全自动快速处理[18],在数据处理过程中,大量的控制点刺点工作耗费了大量的人力物力,随着无人机航摄技术的发展以及空三解算方案的优化,相信今后在稀少控制点甚至无控制点条件下,无人机航摄技术成果将能达到工业级的精度要求。此外,在无人机航摄时代,传统的DEM、DOM的生产已经实现了自动化,节省了大量的人力物力,生产效率得到了大幅提高;但是DLG的生产仍停留在传统的手工生产阶段,相信随着影像匹配技术、空三计算技术及模式识别等新技术的发展,DLG的生产将会实现自动化。
3.4 倾斜摄影测量技术
无人机遥感技术在农业植保、电力管道巡检等方面得到了广泛的应用,随着“一带一路”和“国土三调”等国家政策的扶植,测绘行业将面临着一场大的革新,其中,无人机倾斜摄影技术[19-20]或将成为测绘市场的突破口,在测绘领域掀起一股热潮。
4 结 语
无人机航空摄影测量技术作为行业的新宠,其应用和发展得到了行业的高度认可。本文从无人机航摄遥感数据获取以及遥感数据处理两个角度出发,对无人机航摄作业中地面分辨率和航摄重叠度的确定、航线敷设方案、飞行平台与传感器的选择、飞行质量检查、地面控制点布设与量测、高精度定位定姿技术以及空三加密等关键步骤进行了详尽的阐述,并针对各步骤要注意的问题给出了作业指导意见,之后针对无人机遥感技术的发展方向及可能遇到的挑战进行了预测。该技术的研究对于提高无人机航摄作业效率和成果精度具有重要的指导意义。
