基于扩张状态观测器的永磁同步电机转速环连续螺旋控制
2022-07-23梅珂琪丁世宏葛群辉王巍植
吴 宜,梅珂琪,丁世宏,葛群辉,王巍植
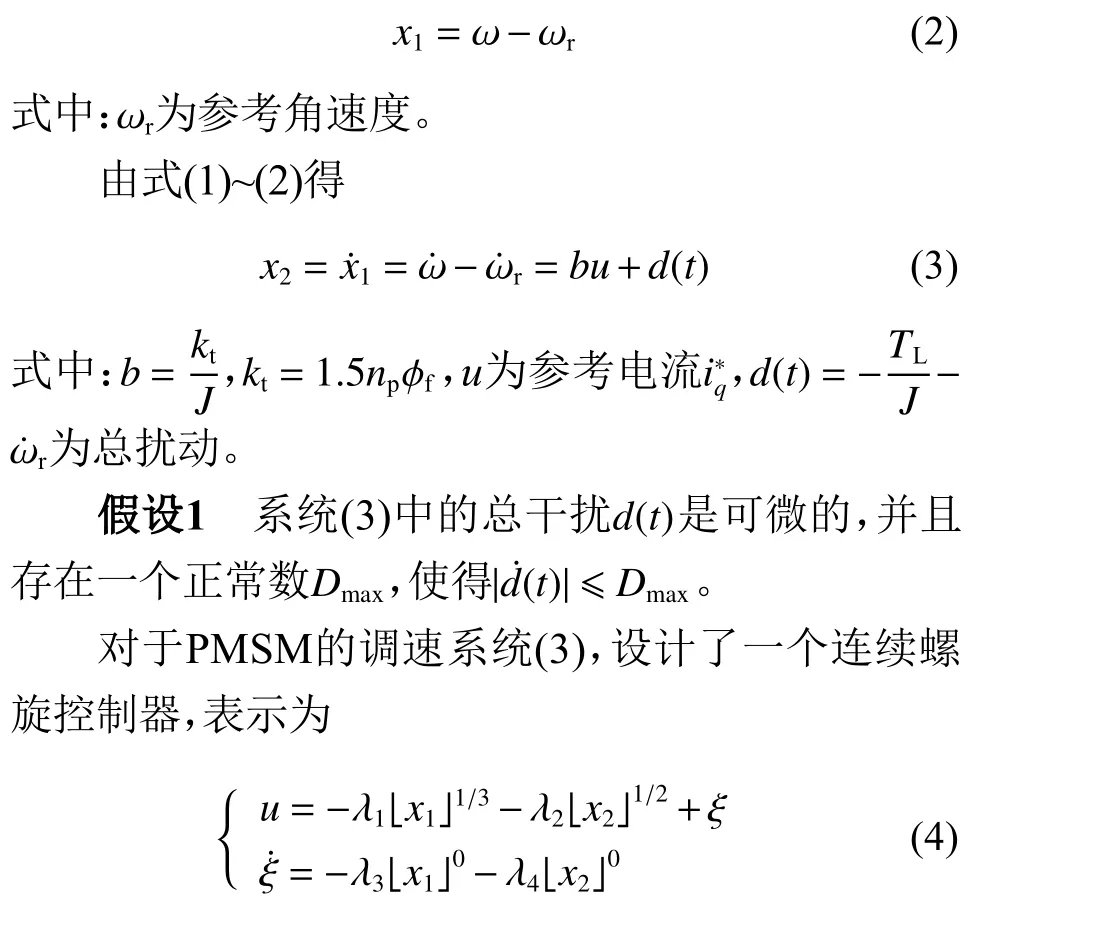
(1. 江苏大学 电气信息工程学院,江苏 镇江 212000;2. 德玛克 (长兴) 注塑系统有限公司,浙江 湖州 313100)
永磁同步电机(Permanent Magnetic Synchronous Motor, PMSM)具有可靠、高效、损耗小等优点,在许多工业应用中起着至关重要的作用。然而,在传统线性控制方法下,很难满足PMSM系统的控制性能要求。原因在于,传统控制方法难以处理外部扰动、参数扰动和非线性动力等不确定性问题[1-5]。因此,越来越多的研究学者开始关注PMSM的非线性控制策略,进而提出了很多控制方法,如模糊控制[6]、鲁棒控制[7]、自适应控制[8]、滑模控制(Sliding Mode Control,SMC)[9-13]等。
在这些方法中,滑模控制因其较强的抗干扰能力而广受关注。其主要优点是,当系统的状态轨迹进入滑动阶段时,它可以有效地抑制参数扰动和外部扰动的影响。为了进一步提高电机的性能,文献[14]提出了一种积分滑模控制(Integral Sliding-mode Control,ISMC),并将其用于PMSM的速度调节。虽与SMC相比,ISMC提高了系统的动态响应性能,但ISMC也存在不连续控制项,这导致了抖振现象,并限制了系统的性能。为了有效地抑制抖振,文献[15]提出了一种连续螺旋算法。该算法可以使系统状态在有限时间内稳定到原点,并显著地减少系统的抖振,但控制器的高开关增益会影响系统性能。于是在文献[16]中提出了一种新型ESO,解决了控制器的高开关增益问题,并且在一定程度上提高了PMSM的控制精度与鲁棒性。
为了综合地解决上述PMSM存在的抖振以及控制器增益过大的一系列问题,本文在文献[14-17]的基础上提出了一种基于ESO的连续螺旋滑模控制(CTSMC)方法。本文的主要贡献可以概括为两个方面。一方面是针对期望速度和实际速度之间的误差过大的问题,提出CTSMC。与比例积分(Proportional Integral,PI)控制相比,该控制可以将误差收敛到一定的区域,从而确保PMSM调速系统具有很强的跟踪性能[18-20]。另一方面是针对CTSMC的高开关增益会带来较差动态性能的问题,提出了一种ESO来估计系统的扰动,从而避免了上述的问题,并且进一步增强了系统的鲁棒性[21-24]。
1 PMSM矢量控制数学模型
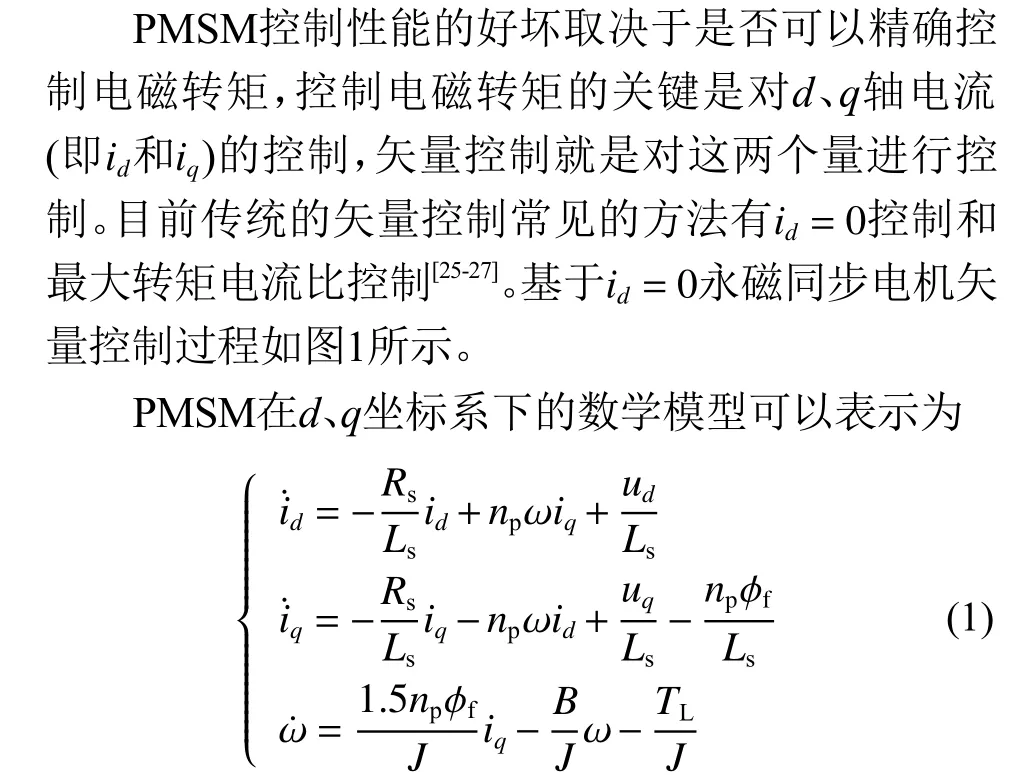
式中:ud、uq分别为d、q轴电压;φf为电机的磁链;id、iq分别为d、q轴电流;ω 为电角速度;Rs为定子电阻;TL为负载转矩;J为转动惯量;B为摩擦系数;Ls为定子电感;np为极对数。
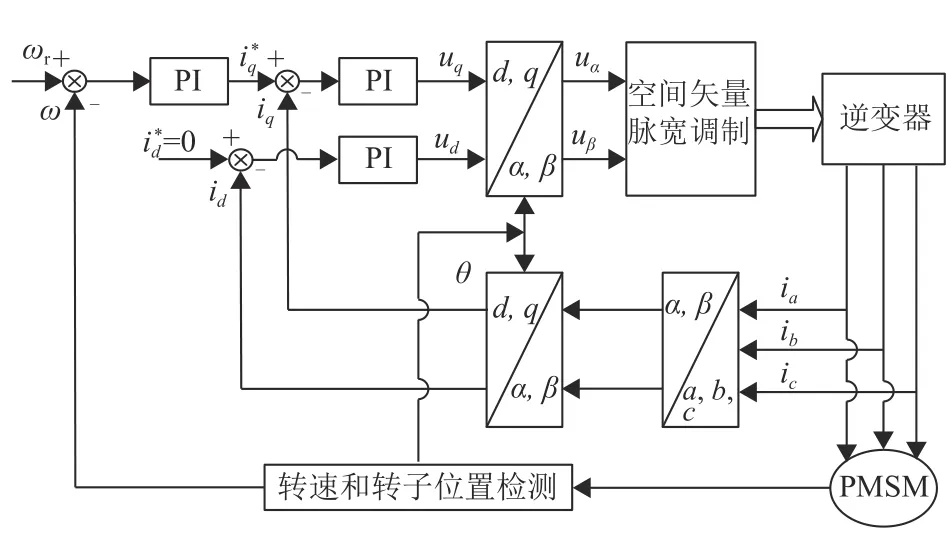
图1 id=0永磁同步电机矢量控制框图Fig.1 Vectorcontrolblockdiagramof PMSMwithid=0
2 PMSM转速环控制器设计
从以上分析可以看出,状态模型是控制设计的基础。传统PMSM的速度调节器使用速度PI控制器来产生相应的参考电流。然而,当负载发生突变以及内部参数发生扰动时,PI控制器的性能并不理想[28-29]。SMC具有对外部干扰和参数扰动不敏感、强鲁棒性和快速响应等优点。因此,提出了一种CTSMC,能够为PMSM的调速提供快速准确的参考输入。此外,CTSMC还可以进一步提高系统的性能和收敛速度。
2.1 CTSMC设计
PMSM系统的主要控制目标是在有负载扰动的情况下提高系统的跟踪精度。将调速系统的跟踪误差定义为
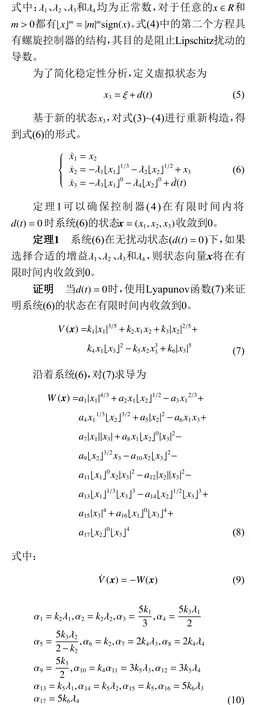


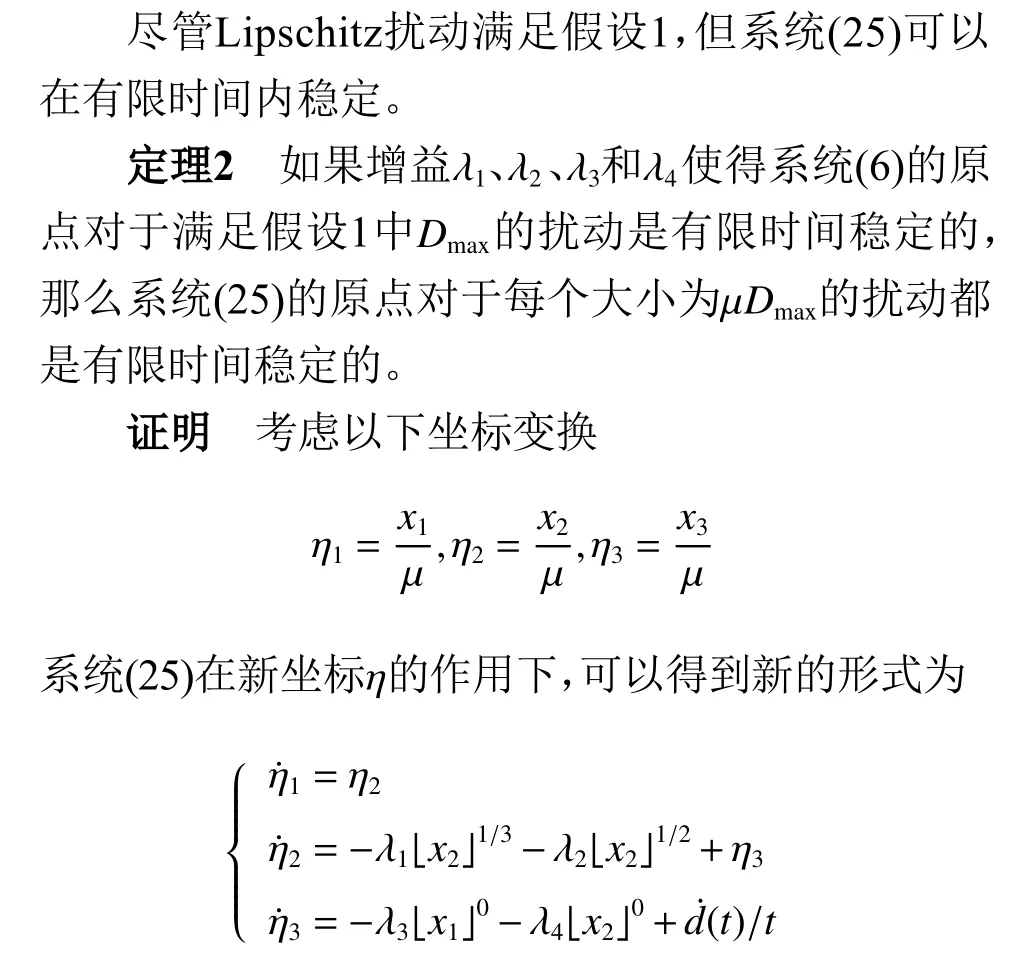
根据此表达式可以证明定理2。
2.2 基于ESO的转速环复合控制器设计
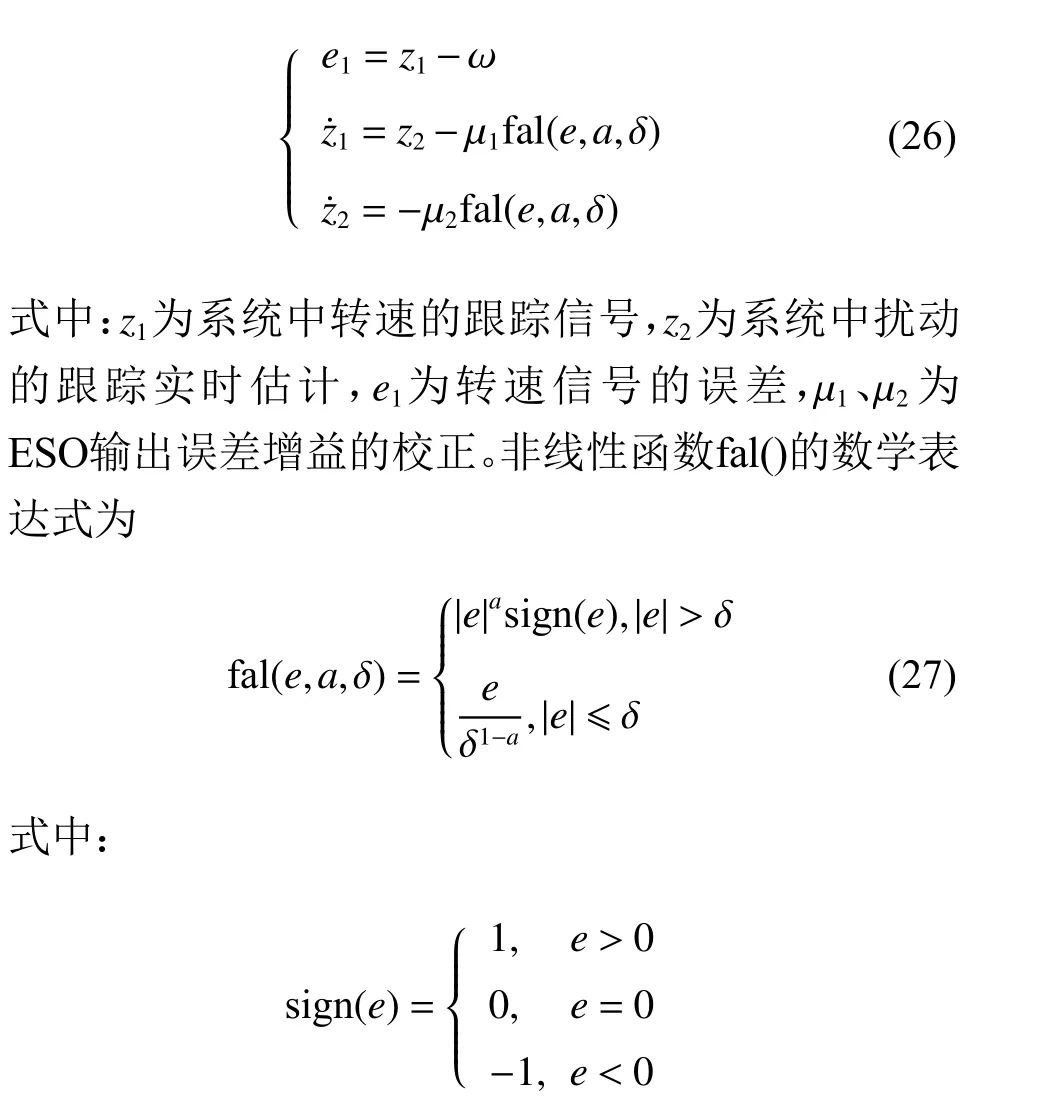
为了提高系统的抗干扰能力和收敛速度,在速度系统中设计了一个观测器。在本节中,首先建立了一个ESO,用来估计PMSM调速系统的扰动。然后,将CTSMC与ESO的估计值相结合,构成复合控制器。
首先,对转速环设计二阶ESO,可表示为
然后,结合之前构建的CTSMC,得到复合控制器。
综上所述,基于ESO的永磁同步电机CTSMC控制原理图如图2所示。

图2 基于ESO的永磁同步电机连续螺旋控制原理图Fig.2 Principle diagram of CTSMC of PMSM based on ESO
3 仿真与实验
为了证明所提出控制器的有效性,在永磁同步电机系统上完成了PI控制器和CTSMC的仿真和实验。该平台采用的是型号为130ST-M10015的三相电机和RTU-BOX204实时数字控制器。系统参数如表1所示。
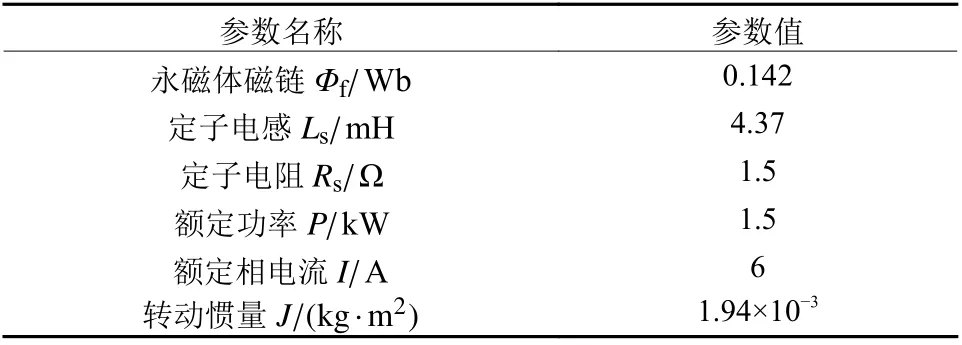
表1 电机驱动参数Table 1 Motor drive parameters
3.1 仿真结果
本文采用id=0的矢量控制,为了公平,可以任意调整所提出控制器的参数,以实现其最佳性能。CTSMC的开关增益选择为λ1=3.5、λ2=0.5、λ3=0.23和 λ4=0.11。此外,无论在速度回路中使用哪种控制器,仿真中两个电流回路的PI控制器参数都是相同的。比例和积分增益分别为20和1 500。参考转速为500 r/min。为了验证所提出控制器的抗干扰性能,本文考虑了负载转矩变化(2.4 N·m)。3种控制方法在负载突变情况下的仿真结果如图3~5所示。从图3~4中可以看出,PI控制器的抗超调能力比CTSMC的差,且CTSMC控制策略在稳定性和抗干扰性能方面优于PI方法。此外,在CTSMC+ESO控制下,电机明显具有更好的抗负载性能。从图5中可以看出,在起动阶段,与CTSMC相比PI控制器的启动电流明显过大。
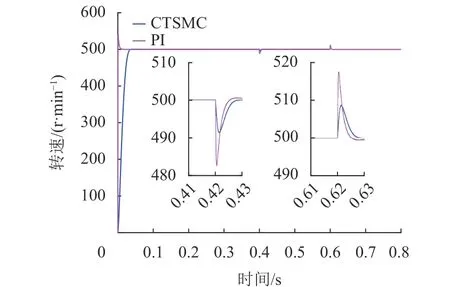
图3 仿真中PI控制器和CTSMC的转速响应对比Fig.3 Comparison of PI controller and CTSMC speed response in the simulation
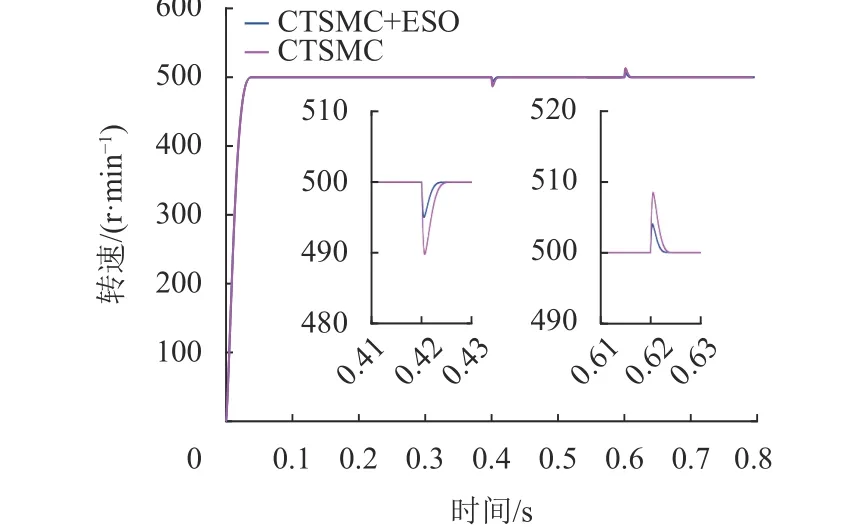
图4 仿真中CTSMC+ESO和CTSMC的转速响应对比Fig.4 Comparison of CTSMC+ESO and CTSMC speed response in the simulation
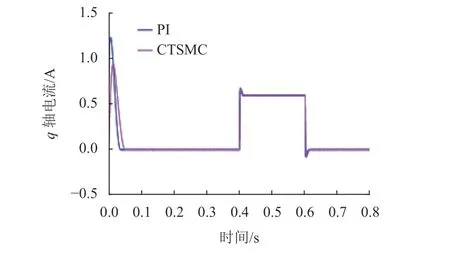
图5 PI控制器和CTSMC的 q轴电流响应对比Fig.5 Comparison of CTSMC and PI controller current response of axis of q
3.2 实验结果
为了进一步研究CTSMC+ESO控制器的有效性,进行了一些实时实验。将ESO和CTSMC应用于PMSM的调速问题以提高系统性能。电流回路的PI控制器的参数同步选择为比例增益0.05和积分增益3000。此外,控制器的参数与仿真中的参数相同。
首先比较了PI控制器和CTSMC的系统性能。两者的参数与仿真中的参数相同。电机在500 r/min的转速并且无负载的条件下,实验结果如图6~7所示。从图6~7可以看出,CTSMC无论在转速还是电流上都表现出更小的超调量和更好的抗干扰性能。
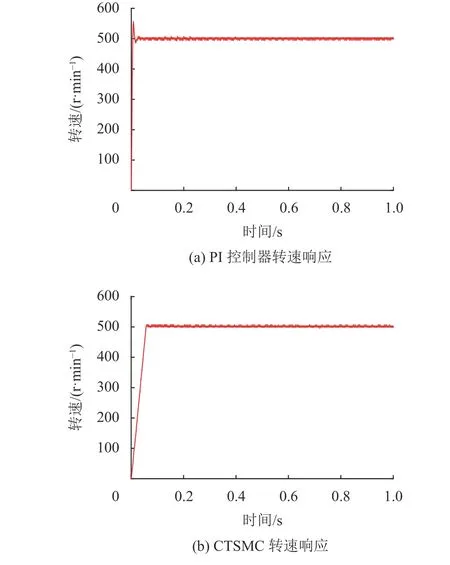
图6 实时实验中PI控制器和CTSMC的转速响应对比Fig.6 Comparison of PI controller and CTSMC speed response in the real time experiment
为了验证加了ESO系统后的性能,对PI控制器、CTSMC和ESO+CTSMC在突加负载下的系统性能进行了比较。从图8~10中可以看出,当添加干扰负载时,可以观察到CTSMC下永磁同步电机系统的转速响应波动较小,并且虽然ESO+CTSMC具有较小的开关增益,但它的最大转速波动远小于CTSMC的最大转速波动。此外,可以很容易地观察到,CTSMC以及ESO+CTSMC下的a相电流和q轴电流波动有所减小。
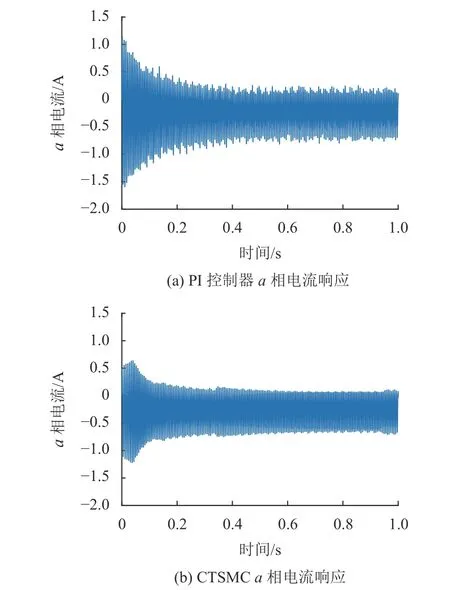
图7 PI控制器和CTSMC的 a相电流响应对比Fig.7 Comparison of PI and CTSMC current response of phase a
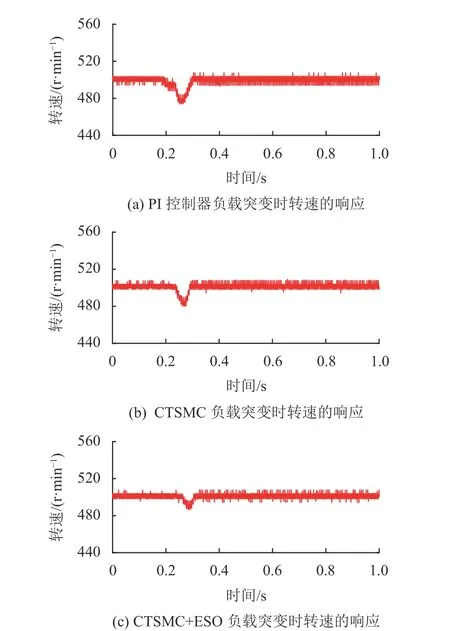
图8 负载突变时转速的响应对比Fig.8 Comparison of speed response under sudden load change

图9 负载突变时a相电流的响应对比Fig.9 Comparison of current response of phase a under sudden load change
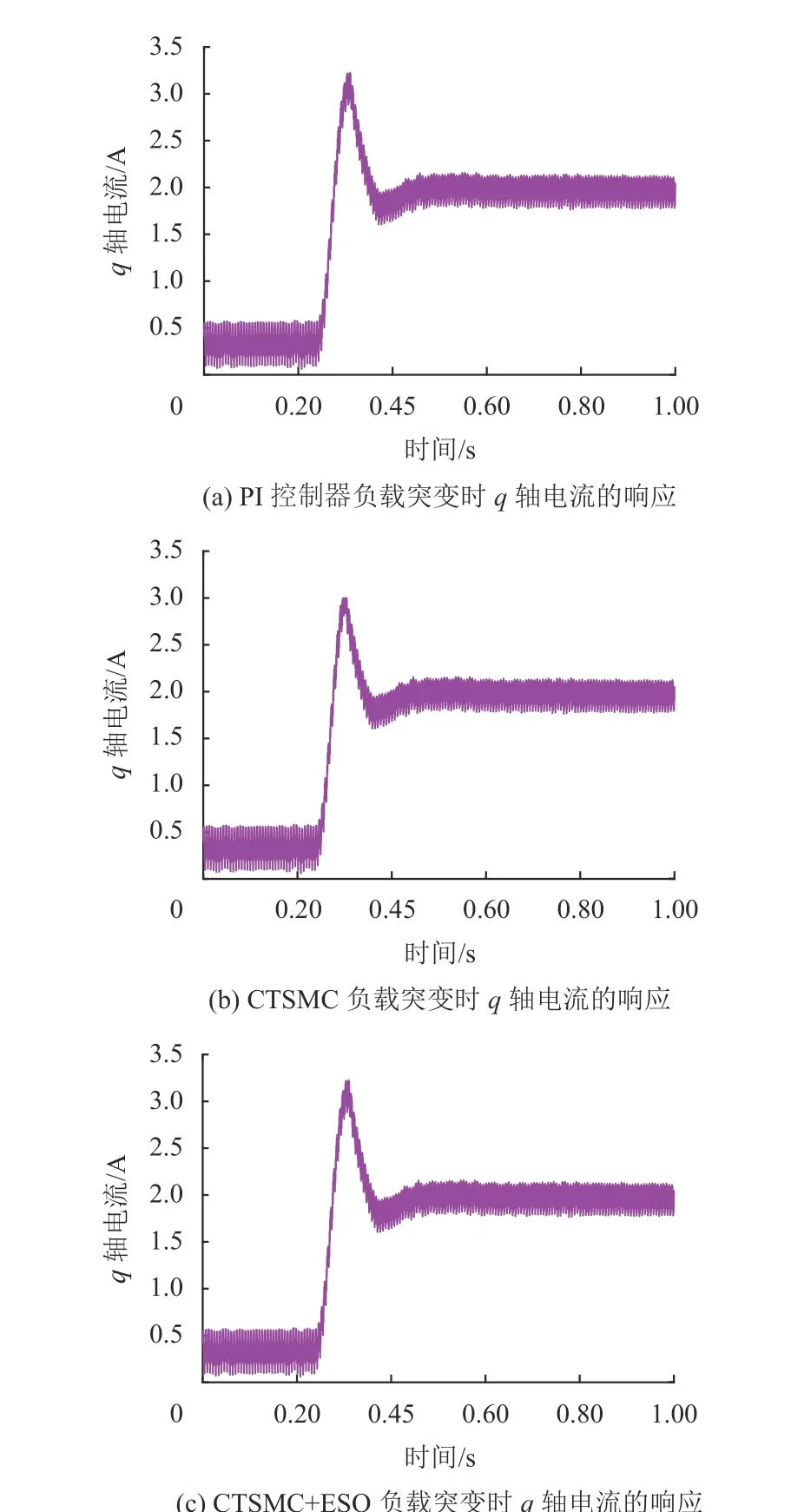
图10 负载突变时q轴电流的响应对比Fig.10 Comparison of current response of axis of q under sudden load change
4 结论
本文介绍了一种基于ESO的复合连续螺旋滑模控制方案在永磁同步电机系统中的应用。首先在转速环部分采用CTSMC方法,提高了负载扰动的鲁棒性,有效减少了系统的抖振。其次,在此控制器的基础上加入ESO,利用CTSMC和ESO的前馈补偿构造复合控制器,可以避免开关增益过高导致的动态性能不理想问题。最后,仿真和实验结果都验证了CTSMC+ESO控制器的有效性。未来的工作可以在控制器设计中采用自适应连续螺旋控制算法,使控制器自动地调节增益。