FDI攻击下非线性多智能体系统分布式无模型自适应控制
2022-07-23车伟伟
曲 燊,车伟伟
(1. 青岛大学 自动化学院,山东 青岛 266071;2. 青岛大学 山东省工业控制技术重点实验室,山东 青岛 266071)
近年来,多智能体系统(Multi-agent Systems,MASs)的协同控制问题在无人机[1]、多机器人系统[2]等领域的广泛应用引起了学界极大的研究兴趣。与传统的控制系统相比,MASs具有分布式、协作、自治、容错、高效、低成本等优点。一般来说,协同控制主要有3个目标,即趋同控制、跟踪控制和包容控制。趋同控制的目标是使所有智能体的输出最终达成一致。跟踪控制的目标是在趋同控制目标的基础上跟踪期望的输出。包容控制的目标是使一群追随者能够到达并停留在由多个领导者形成的凸包上。目前,已经有许多基于模型的MASs趋同控制方法[3-8]、跟踪控制方法[9-12]和包容控制方法[13-19]。
值得说明的是上述研究都是基于系统模型的。然而,在实际系统中,经常无法得到系统的准确模型。因此,学界已经有几种数据驱动的控制方法来完成MASs的各种控制任务[20-22]。作为一种新颖的数据驱动方法,文献[23-27]提出的无模型自适应控制(Model-free Adaptive Control, MFAC)不需要任何系统模型,只需要利用系统的输入输出信号。在MFAC框架中,可以利用动态线性化技术将非线性系统变换为线性数据模型,可分为紧格式动态线性化(Compact Form Dynamic Linearization, CFDL)、偏格式动态线性化(Partial Form Dynamic Linearization,PFDL)和全格式动态线性化(Full Form Dynamic Linearization,FFDL)。需要指出的是,CFDL只使用一个参数来捕捉非线性系统的复杂行为,如非线性和时延等。PFDL和FFDL通过使用多个参数来更好地捕捉复杂非线性系统的复杂行为。文献[25]和文献[26]分别研究了单输入单输出(Single-input Singleoutput,SISO)和多输入多输出(Multiple-input Multiple-output,MIMO)非线性系统的CFDLMFAC和PFDL-MFAC问题。此外,文献[27]研究了FFDL-MFAC问题。
最近,MFAC方法已被引入MASs以实现协同控制目标。文献[28]使用MFAC算法研究了一致性跟踪控制问题,其中提出了分布式无模型自适应控制(Distributed Model-free Adaptive Control,DMFAC)算法来保证所有智能体都可以跟踪参考信号。文献[29]研究了在切换拓扑下使用MFAC算法应对非线性MASs的输出编队问题。分布式无模型自适应迭代学习控制的问题在文献[30]中得到解决。进一步扩展应用该结果使所有智能体在有限时间内实现趋同跟踪目标[31]。文献[32]研究了非线性MASs的编队控制问题,其中设计了无模型自适应迭代学习控制算法来实现编队控制目标。此外,文献[33]研究了具有有界扰动的非线性MASs的鲁棒无模型自适应迭代学习编队控制问题。文献[34]研究了使用MFAC算法的MASs的中继协同跟踪控制问题。文献[35]使用无模型自适应迭代学习控制方法解决了具有未知干扰的MASs的一致性跟踪控制问题。文献[36]研究了多输入多输出MASs的鲁棒迭代学习一致性跟踪控制问题。
需要指出的是,上述无模型自适应控制器设计中采用了网络拓扑,即无模型自适应控制器参数依赖于拉普拉斯矩阵的特征值。为了更好地展示MFAC算法在MASs框架中的优越性,有必要仅使用MASs的输入/输出(input/output,I/O)数据来研究新的DMFAC算法。主要困难是如何建立一个新的MASs的DMFAC框架。因此,需要在现有的单智能体数据模型的基础上,探索一个合理的MASs数据模型。
随着网络通信技术的发展,MASs遭受网络攻击时的安全性问题受到广泛关注。众所周知,恶意网络攻击是不可避免的,而且会对MASs造成严重影响。有两种常见的网络攻击,即拒绝服务(Denial-of-Service,DoS)和虚假数据注入(False Data Injection,FDI)攻击。目前,有分别考虑DoS攻击[37-38]和FDI攻击[39-40]的基于模型的分布式MASs控制器。此外,文献[41]研究了受到DoS攻击的MASs协同控制问题,并开发了一种基于学习的DMFAC来抵抗DoS攻击。然而,考虑FDI网络攻击的DMFAC问题并没有得到很好的解决,还缺乏相关的研究。
为了解决上述问题,本文首先建立了一种新的分布式紧格式动态线性化(Distributed CFDL,DCFDL)MASs数据模型。然后,基于DCFDL数据模型,研究了分布式无模型自适应控制器,以实现遭受FDI攻击的MASs分布式协同控制目标。
1 预备知识和DMFAC框架制定
本节旨在DCFDL数据模型的基础上建立非线性MASs的DMFAC框架。
1.1 预备知识
1.2 基于DCFDL的DMFAC框架制定

注释1 假设1是非线性系统的一般约束条件。假设2意味着有界输入产生有界输出,这在实际系统中是满足的。假设3是达成趋同控制目标的充分必要条件。假设4意味着当输入增加时,系统的输出不会减少,这被认为是一种“类线性”特性。在基于模型的控制方法中的控制方向可以找到类似的假设。
注释2 引理1提出了一种新的线性化方法,其广泛应用于无模型自适应控制方法中[23-27]。与现有的线性化方法不同,这种线性化方法仅使用系统的I/O数据。此外,可以通过设计估计器来估计PPD参数。
为了将MFAC框架引入MASs,定义分布式量测输出为


1.3 分布式无模型自适应控制器设计
2 带有FDI攻击的DMFAC建模
FDI攻击旨在通过将虚假数据注入传输网络来破坏系统性能。假设攻击者会随机对从传感器到控制器的传输网络发起FDI攻击,如图1所示。因此,当传输网络中发生FDI攻击时,观测器和控制器接收到的数据包为

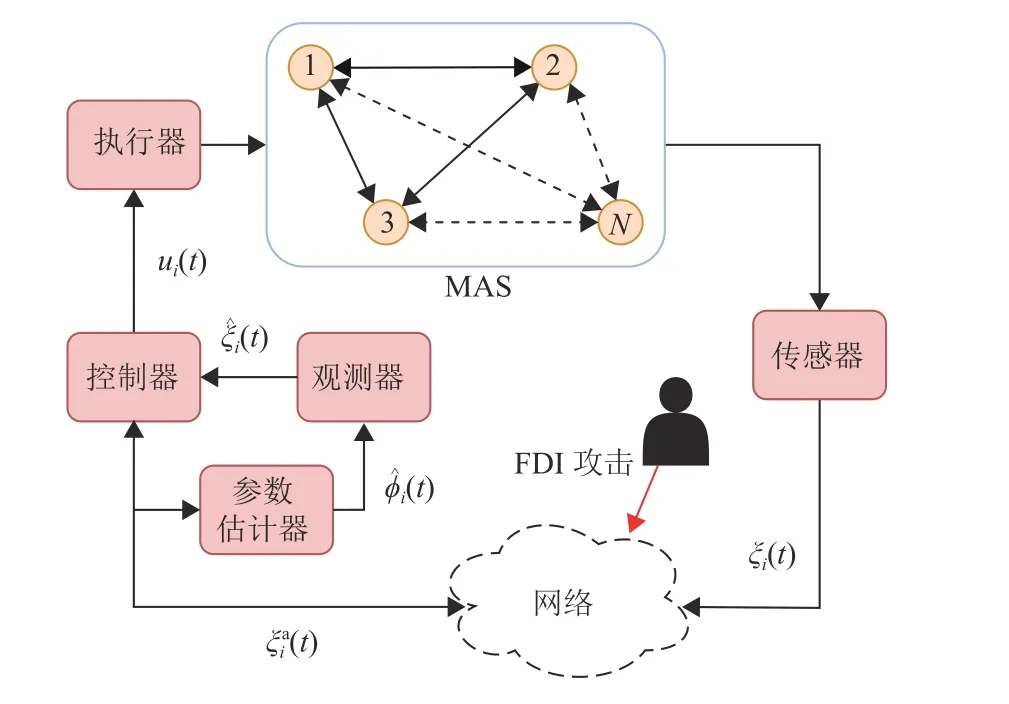
图1 具有FDI攻击的MASs的DMFAC系统框图Fig.1 System block diagram of the DMFAC for MASs with FDI attacks

3 DMFAC算法设计与稳定性分析
本节讨论了MASs的稳定性分析,并得到了DMFAC算法的参数。以下定理是保证趋同控制目标能够实现的主要结果。
定理1 对于受到FDI攻击的非线性MASs式(1),如果满足假设1~4,而且存在λi>λmin和 λmin>0被合理选择, µi≥1 ,ρi∈(0,1] ,ηi∈(0,1],Ki∈(0,2),初始值 φ ˆi(1)>0 和 存在任意小的正常数σi(i=1,···,N),则可以使用以下DMFAC算法实现趋同控制目标。
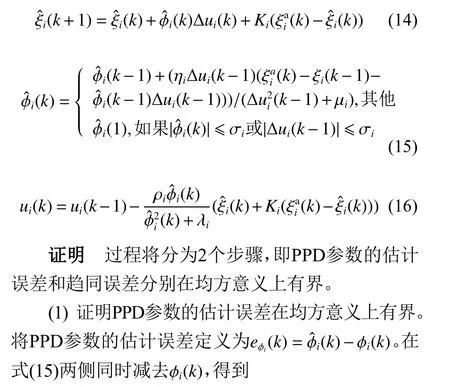



另外结合假设3中的有向生成树的条件,可以解决问题1,即趋同误差在均方意义上是有界的。
注释5 所设计的DMFAC算法式(14)~(16)仅使用系统的I/O数据,没有使用模型参数。另外,所设计的控制算法并不需要知道MASs拓扑结构的全局信息。
4 仿真
在本节中,提供了仿真示例,以验证所提出的DMFAC算法的有效性。
考虑以下异构非线性MASs。
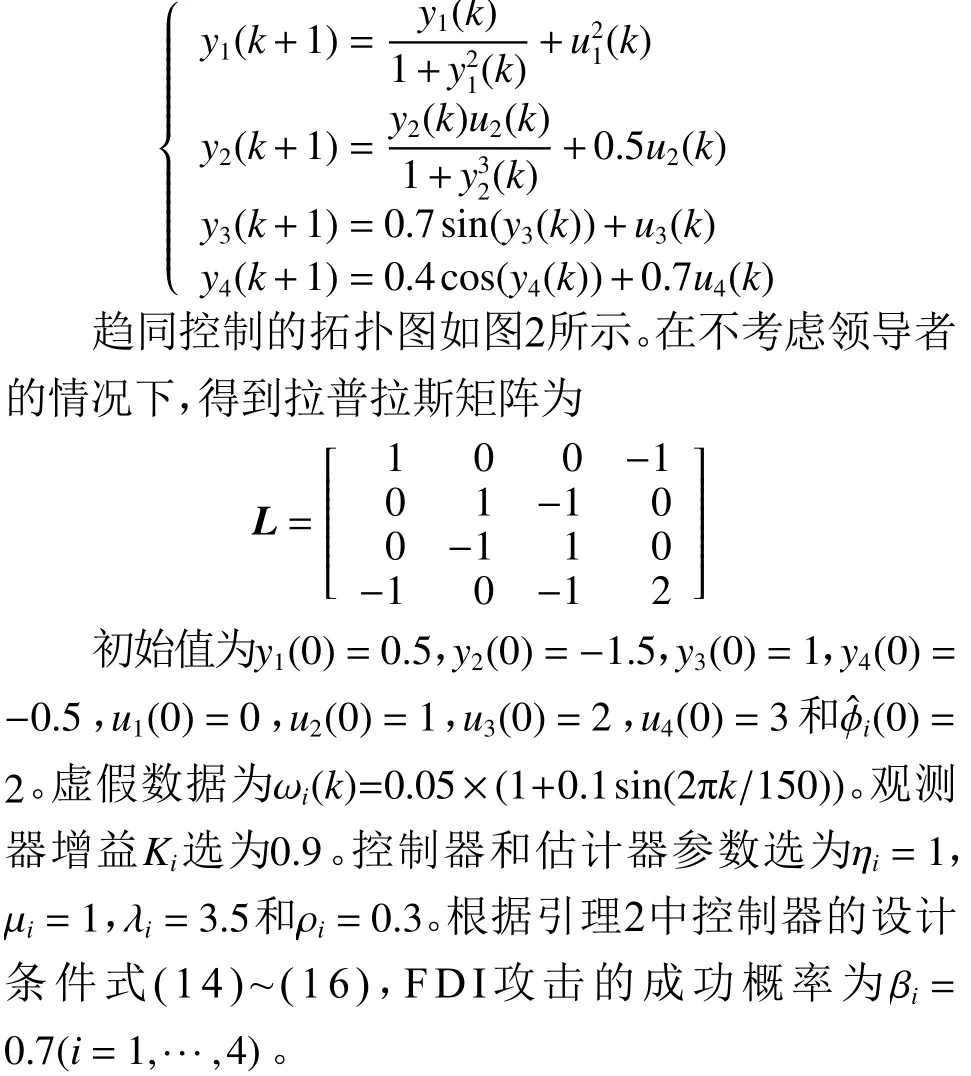
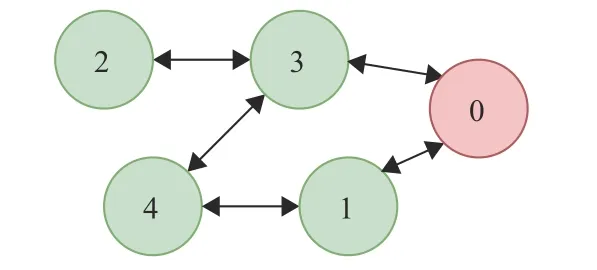
图2 趋同控制的拓扑图Fig.2 The topology graph for the consensus control
仿真结果如图3所示。可以观察到,当通信网络受到FDI攻击时,所有智能体的输出都是有界趋同的。

图3 有和无FDI攻击的趋同控制算法的性能Fig.3 The performance of the consensus control algorithm with(left)and without(right) FDI attacks
图4展示了在保持其他初始值不变,ωi(k)=0.05×(1+0.1sin(2πk/150))时,不同FDI攻击成功概率下趋同控制算法的性能。图5展示了在保持FDI攻击的成功概率 βi=0.7(i=1,···,4)和其他初始值不变的情况下,不同虚假数据ω1i(k)=0.01×cos(2πk/150)),ω2i(k)=0.05×cos(2πk/150)),ω3i(k)=0.1×cos(2πk/150))的趋同控制算法的性能。可以观察到,对于所有不同的时变有界虚假数据,算法都可以实现趋同控制目标。
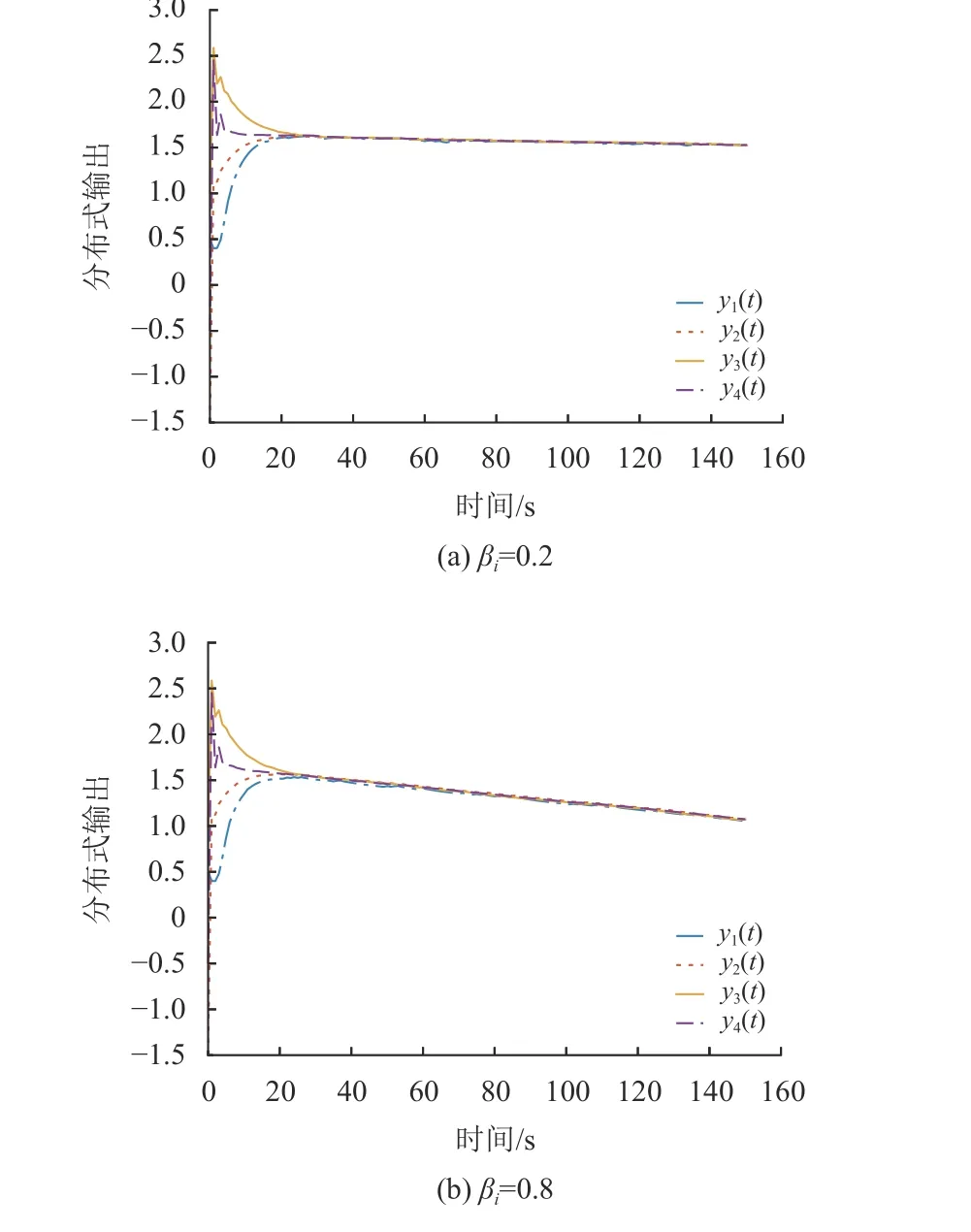
图4 不同攻击成功概率下趋同控制算法的性能Fig.4 The performance of the consensus control algorithm with different attacks possibility
图5 不同虚假数据下趋同控制算法的性能Fig.5 The performance of the consensus control algorithm with different false data
5 结论
本文研究了受FDI攻击的非线性异构MASs的分布式趋同MFAC问题,在文献[25]中设计的单智能体CFDL数据模型的基础上,提出了一种新颖的DCFDL数据模型设计方法,通过改进的动态线性化方法,使用非线性MASs的I/O数据获得等效线性数据模型。基于DCFDL数据模型,设计了一种新的DMFAC算法来实现受FDI攻击的MASs分布式趋同控制。所提出的DMFAC算法既不需要系统模型,也不需要网络拓扑结构。仿真结果表明,所设计的ET-MFAC算法可以很好地实现分布式趋同控制目标。