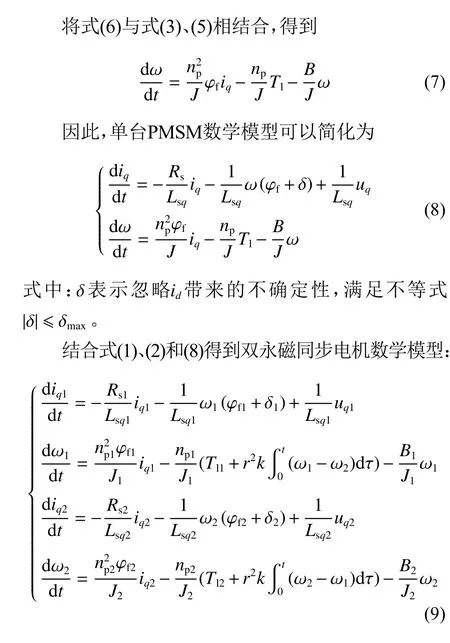
双永磁同步电机滑模协调控制及实验研究
2022-07-23周林娜金南南杨春雨
周林娜,金南南,王 海,杨春雨
(中国矿业大学 信息与控制工程学院,江苏 徐州 221116)
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有转矩惯量比高、温升低、功率因素高以及动态特性好等显著特点,在日常生活、工业生产、农业生产、航空航天中得到了日益广泛的应用[1-4]。随着工艺要求不断提高,往往需要增加系统中电机的数量以提高控制性能。两台电机协调驱动可以增加系统的灵活性、减小电机体积、减少能耗,在电动汽车、输送带和风力发电等工业生产中得到广泛应用。因此,研究双永磁同步电机系统协调控制具有广阔的应用前景和重要学术价值。
在双电机同步控制系统中保证两电机转速同步和转矩同步非常重要,倘若系统在运行中出现严重的转速差或转矩差,那么会造成断带、打滑甚至电机损坏[5-9]。针对双电机协调控制精度的问题,国内外学者将控制结构和先进的控制算法相结合以确保系统的同步性。传统的控制结构主要有并行控制、主从控制、交叉耦合控制、偏差耦合控制、虚拟主轴控制等;控制算法有滑模控制、神经网络控制、自适应控制和预测控制等[10-15]。滑模变结构控制(Sliding Mode Control, SMC)主要是利用控制量的高频切换使得被控对象沿着滑模面运动,对外界扰动抑制和系统不确定性体现出很强的鲁棒性,非常适用于PMSM系统,很多学者在单电机控制中引入滑模控制,而忽略了在多电机系统中引入滑模控制以设计优化协调控制器[16-20]。
为了提高双永磁同步电机驱动系统对于负载扰动的鲁棒性,本文研究双电机协调控制问题。首先,利用胡克定律刻画柔性联接的耦合特性,并考虑采用d轴电流为零的策略对系统带来的不确定性,初步建立了双电机系统数学模型。接着,引入交叉耦合控制和PI算法且将系统扰动分为匹配扰动和非匹配扰动,建立了具有不确定性和非匹配扰动的双电机数学模型。然后,针对系统的不确定性和非匹配扰动提出一种基于干扰观测器的积分滑模控制方法。最后,在基于dSPACE的多电机平台上进行半实物仿真实验。实验结果表明,该方法能有效提高系统在启动和负载突变时的转速同步和转矩同步性能。
1 双永磁同步电机系统数学模型
如图1所示为双永磁同步电机的物理结构示意图,驱动滚筒之间通过皮带或齿轮中间连接器联接,两电机分别驱动两端的滚筒使得系统同步运行,通常应用于输送机、起重机及电梯等场合[21-24]。在该类系统中,通常情况下两电机的转速处在同步协调状态下,但是,在实际应用场景中系统会受到外界环境的未知干扰,使得系统内部电流和转速出现差异,造成皮带或齿轮的张力波动过大,这样两电机之间的耦合作用力将会出现并且进一步引发两电机相互影响,出现皮带或齿轮断裂,转矩差过大会导致电机的发热烧毁[25-28]。因此,双电机系统中保证转速同步和转矩平衡是协调控制的重要目标。
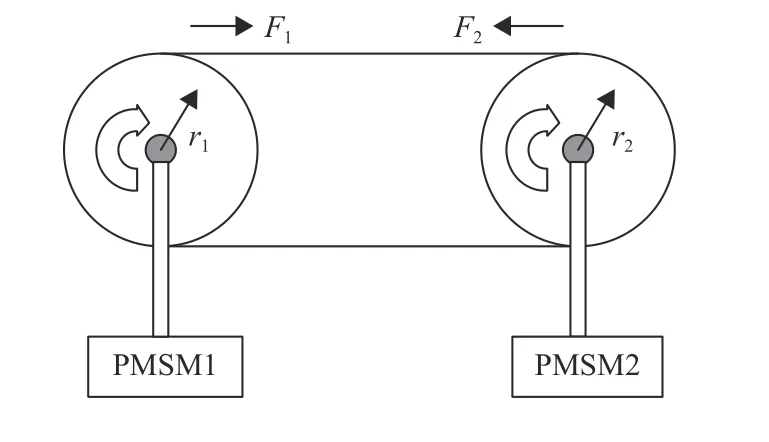
图1 双永磁同步电机系统物理结构示意图Fig.1 Physical structure diagram of dual permanent magnet synchronous motor system
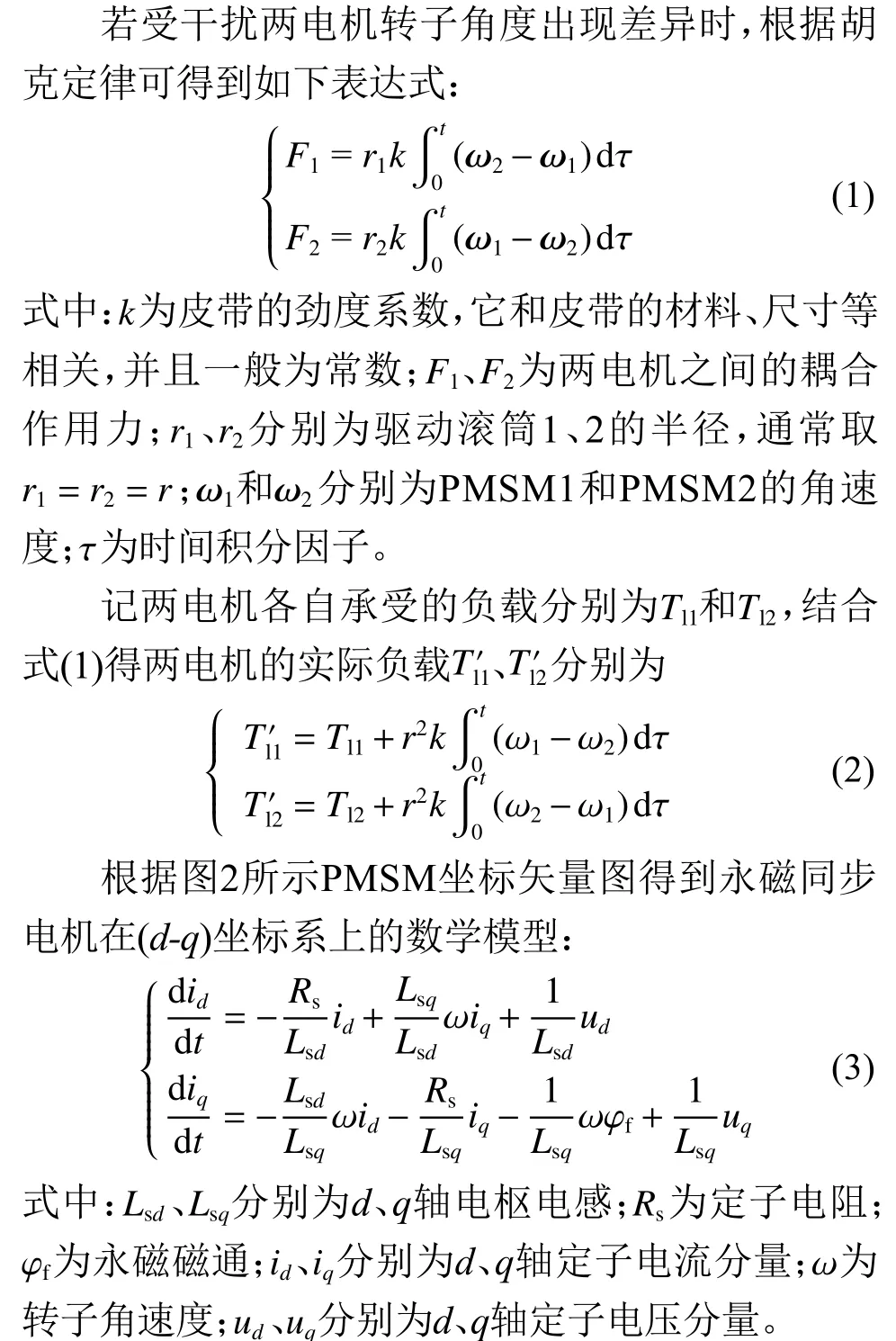

图2 PMSM坐标矢量图Fig.2 Clock-phase diagram of PMSM

2 滑模协调控制系统设计
2.1 双永磁同步电机系统滑模协调控制结构

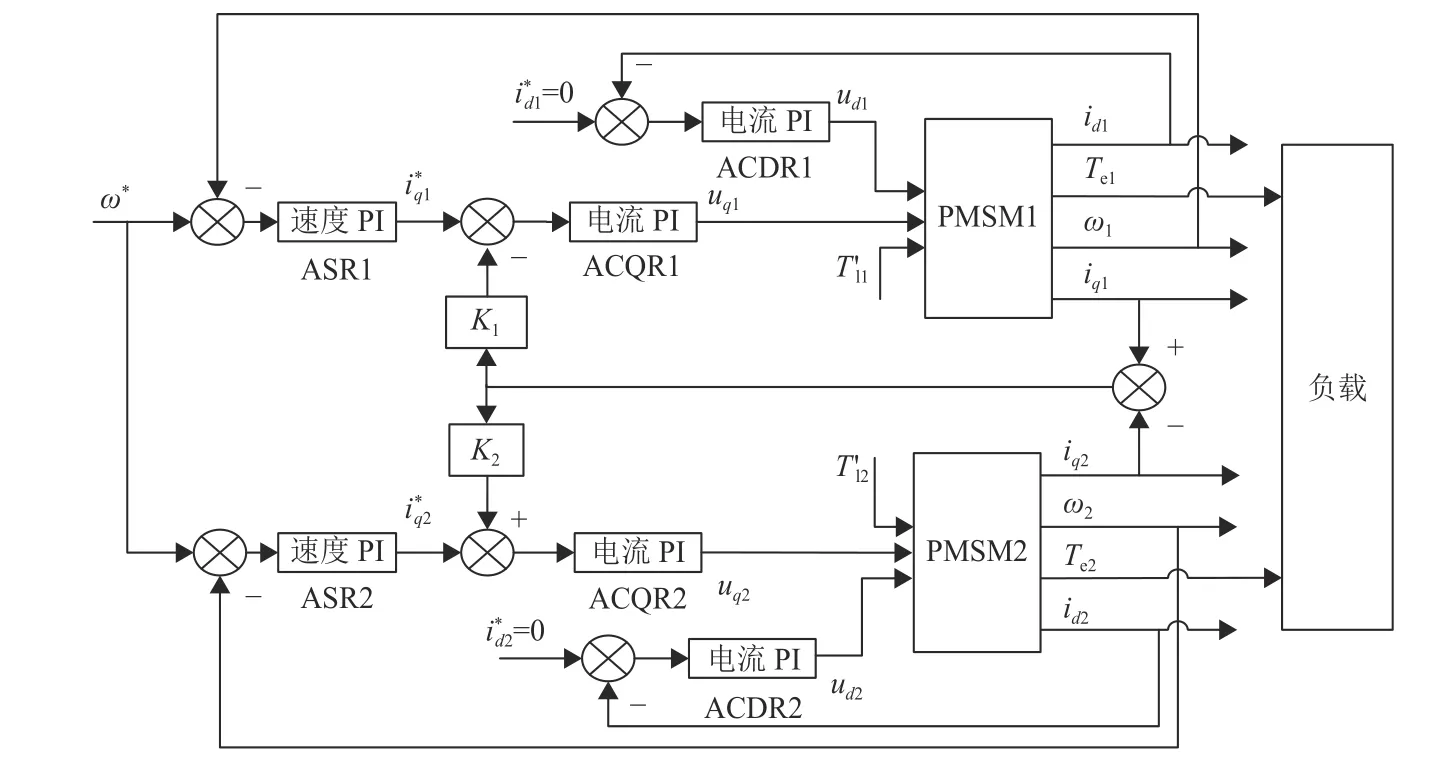
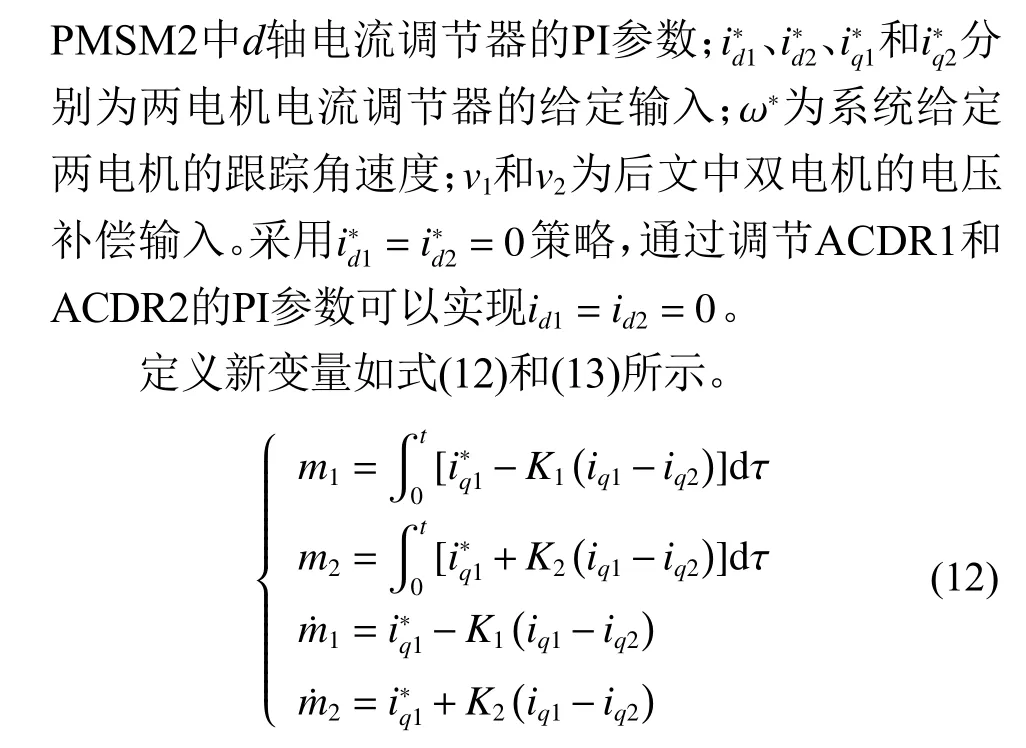
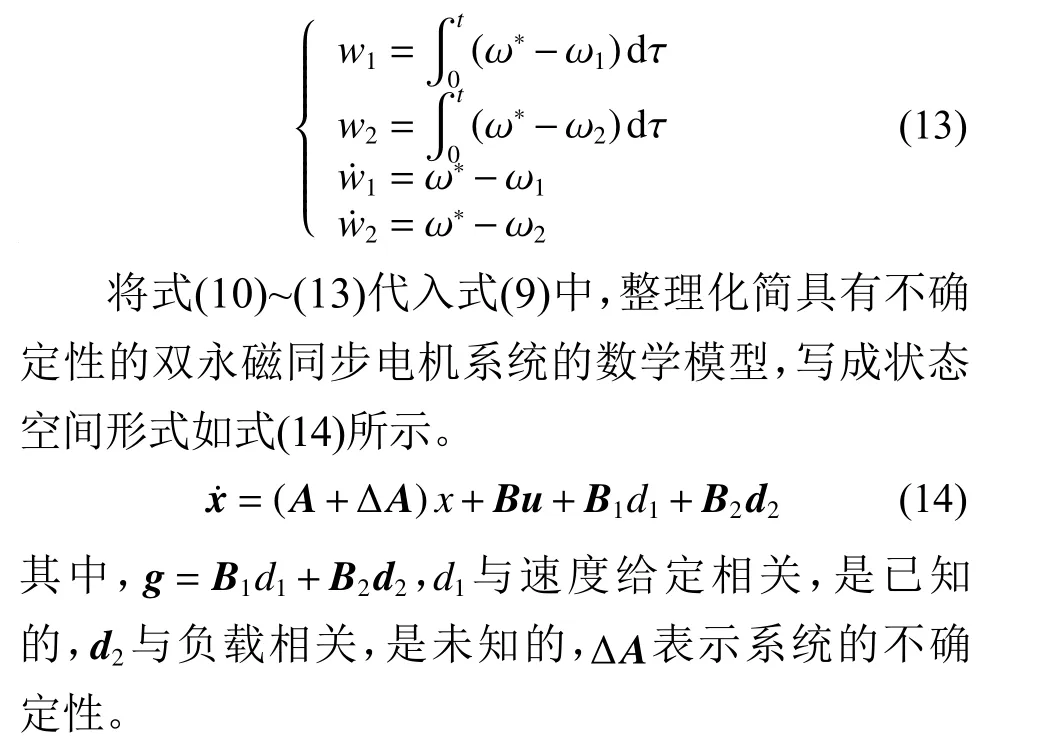
图3 双永磁同步电机系统交叉耦合控制结构Fig.3 Cross coupling control structure of flexible coupling dual permanent magnet synchronous motor system

在传统的交叉耦合控制中,速度同步和转矩同步并没有达到最优效果,因此本文提出如图4所示的交叉耦合控制和滑模控制结合的双电机协调控制结构。
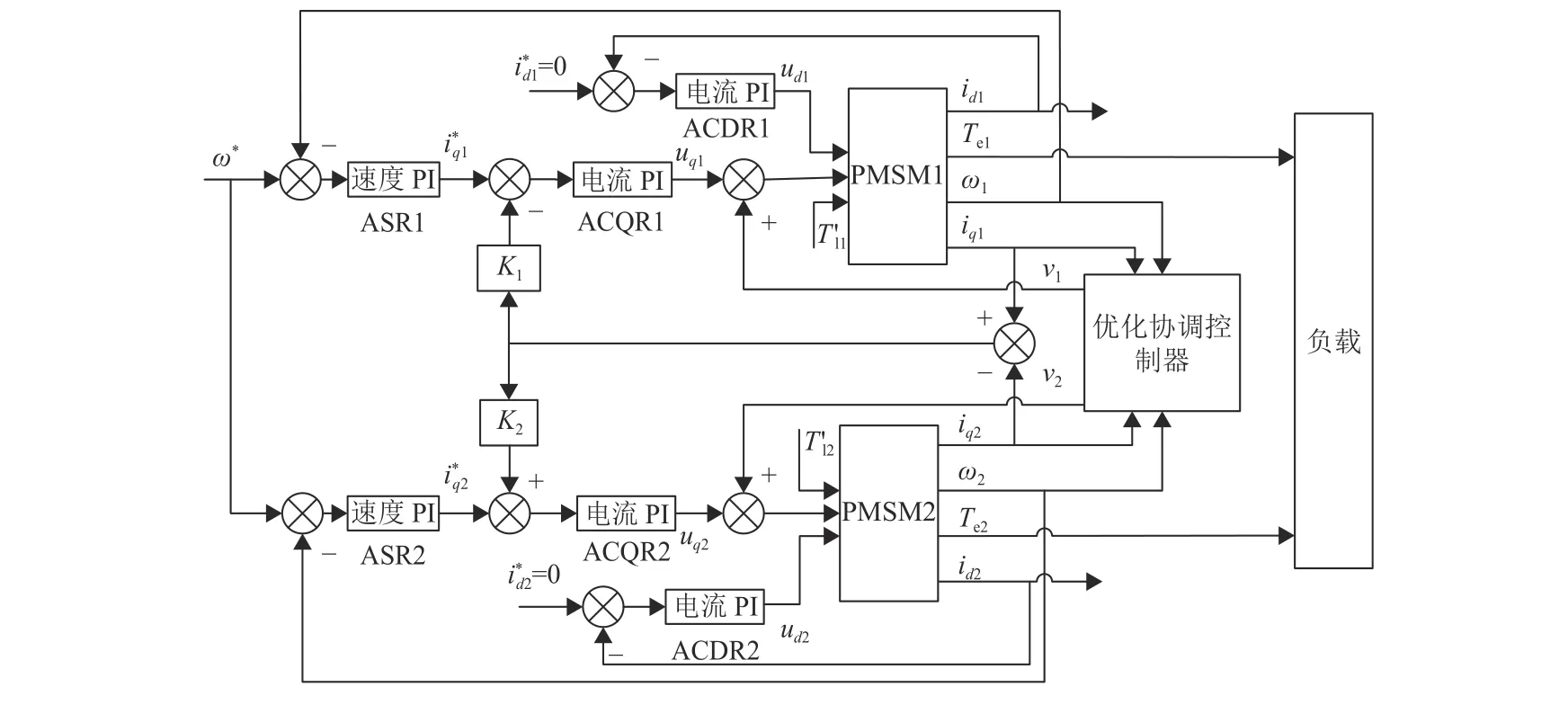
图4 双永磁同步电机系统滑模协调控制结构Fig.4 Sliding mode coordination control structure of dual permanent magnet synchronous motor system
2.2 双永磁同步电机系统滑模协调控制器设计
滑模变结构对外界扰动、负载频繁变化的系统具有较好的鲁棒性,能够克服系统的不确定性,当其中一台电机受到干扰时通过滑模控制可以使系统迅速作出响应,选择合适的滑模面和控制律,合理设计控制器增益可使系统满足到达条件和稳定性,并且沿着滑模面滑动。但是系统状态轨迹运动到滑模面后滑向平衡点是不可严格控制的。由于符号函数的存在系统一般沿滑模面做切换运动,这便会造成抖振,在实际应用中需选取合适的控制律削弱抖振[30-34]。本文将非匹配干扰估计值考虑在内设计积分滑模控制器,控制器采用欧几里德范数替换传统的符号函数有效抑制了抖振,利用H∞控制方法合理设计控制增益和干扰抑制增益使系统满足H∞性能指标和稳定性,提高了双电机控制系统的鲁棒性[35-39]。
2.2.1 干扰观测器设计
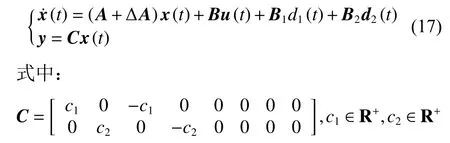
结合式(14)将带有干扰的双永磁同步电机系统写为
受到文献[40]启示,干扰观测器设计为




于是
综上所述,基于干扰观测器的的积分滑模控制框图如图5所示。
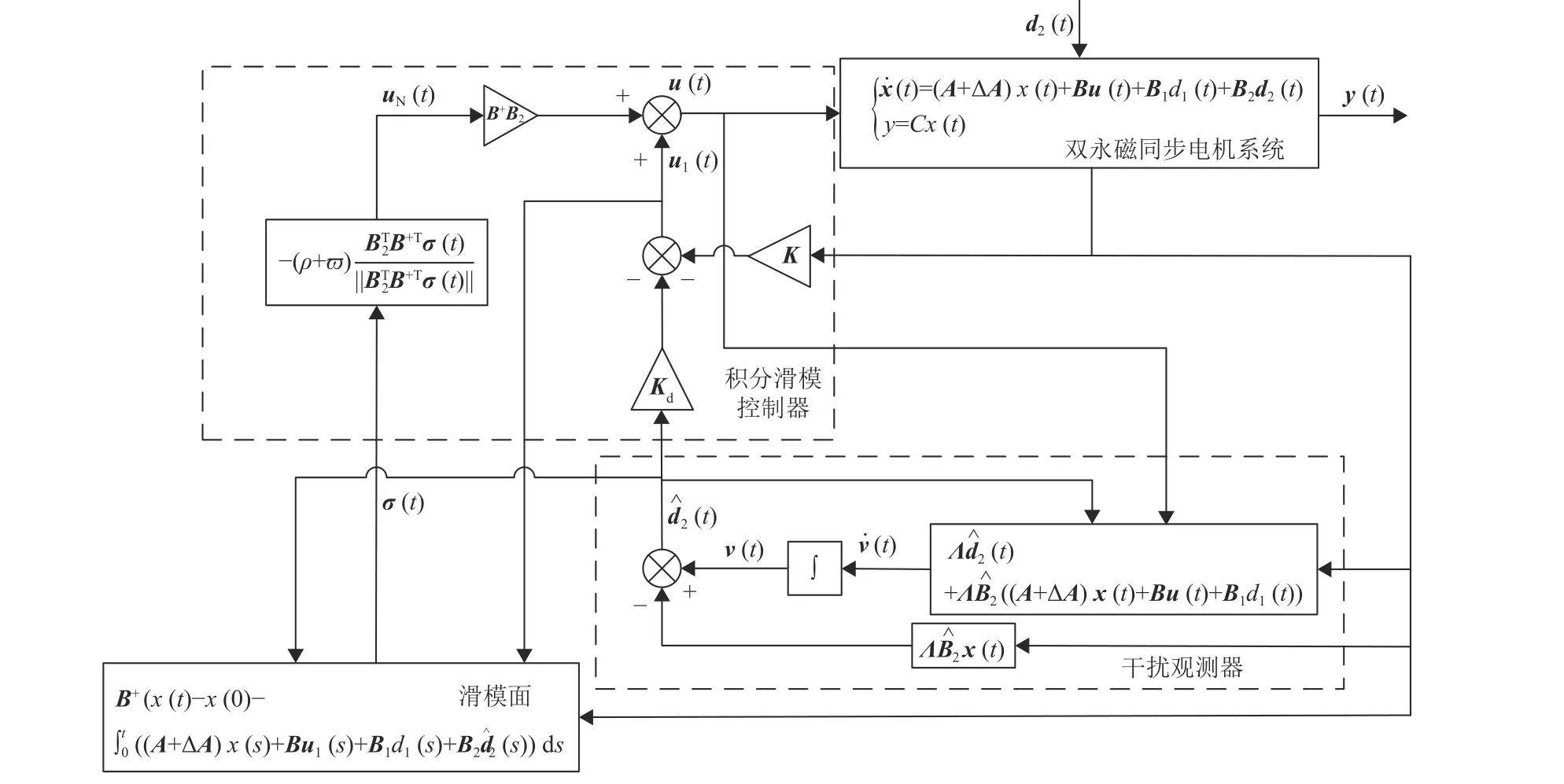
图5 基于干扰观测器的积分滑模控制框架Fig.5 Integral sliding mode control framework based on disturbance observer

引理3 对于任意具有适当维数的常数矩阵Q1和Q2,有如下不等式成立:


3 实验分析
本节基于dSPACE的双永磁同步电机半实物仿真实验平台进行实验,通过两电机在交叉耦合控制和滑模协调控制下的角速度和q轴电流的对比情况,分析本文所设计的滑模协调控制器的优越性。
利用基于dSPACE的双永磁同步电机实验平台验证所设计的协调控制器的实际运行效果。表贴式永磁同步电机选取的型号为ACSM60-G00630LZ,具体参数如表1所示,电机尾部带有编码器反馈电机的位置信号;扭矩传感器用以输出电机扭矩;减速箱用以实现电机等比减速;输送带是采用橡胶制成的,中间配有张紧装置;电磁粉末制动器选取的型号为FZ-6-K,并和其中一台电机同轴连接用以模拟添加负载;张力控制器选取型号为TB-200A,其有4种工作模式可供选用,分别为可循环切换恒流(恒电流输出),恒压(恒电压输出)、恒功率输出、外接电位器(外部电压控制)。机械实验装置实物如图6所示。
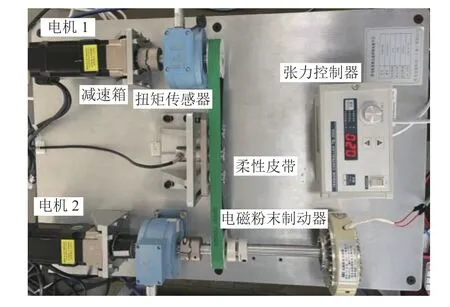
图6 机械实验装置Fig.6 Mechanical test device
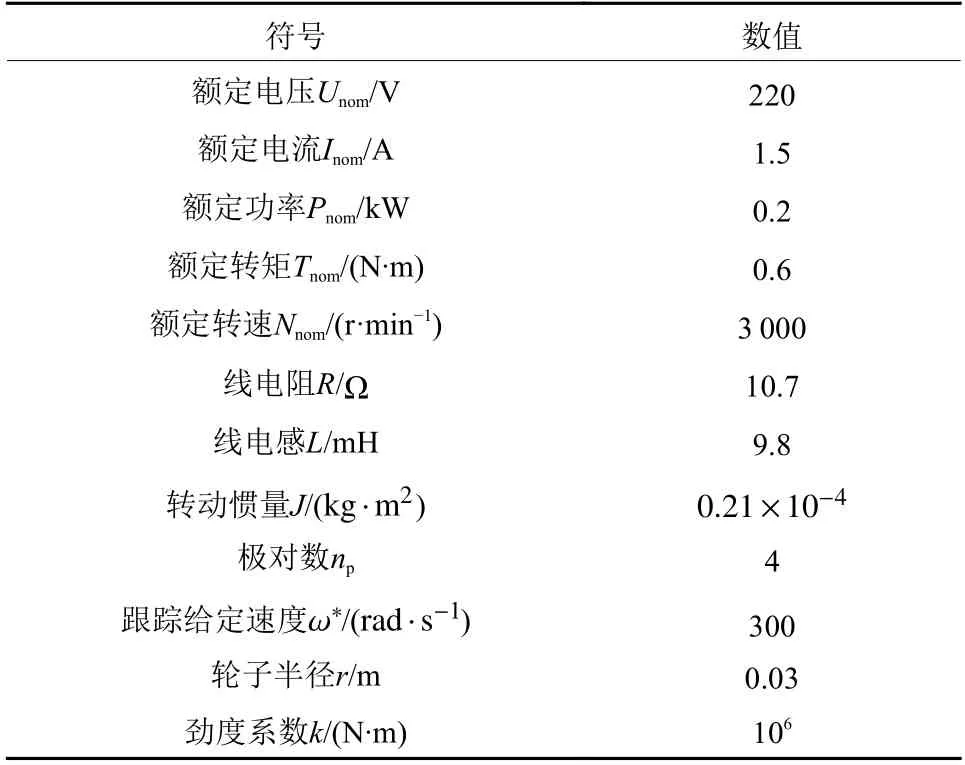
表1 PMSM参数Table 1 PMSM parameters
实验平台主要由变流器、转接板、变流器、调压器、MicroLabBox控制器、上位机、刚柔耦合多电机实验装置等组成,实物如图7所示。
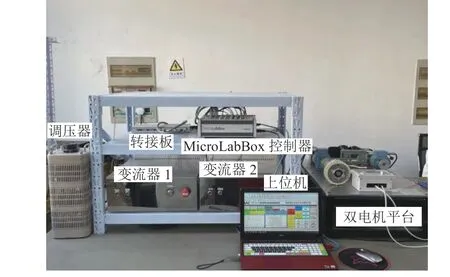
图7 双永磁同步电机半实物仿真硬件系统Fig.7 Hardware-in-the-loop simulation system of dual-PMSM

在10 s时突加8 N ·m负载,从图8(a)交叉耦合控制下的两电机的角速度波形图可以得到,两电机启动经过约6 s的调节后都能很好地跟踪提前给定的角速度 ω∗。并且在10 s发生负载突变时两电机的角速度均有一定程度下降然后恢复平稳,在图8(b)中表示的是两电机的q轴电流变化情况,在启动阶段,两电机的q轴电流相差较大,当发生负载突变时,两电机的q轴电流均有所上升同时出现一定误差,经过约2 s恢复平稳并近似相等,这表示转矩同步和功率平衡。图9为表示滑模协调控制下两电机角速度和q轴电流的波形,与交叉耦合控制下两电机在启动阶段和突加负载时的角速度相比超调有所下降且q轴电流恢复平稳更快。图10为两种控制方法下角速度差和q轴电流差比较,可以得到滑模协调控制下的两电机在启动阶段和突加负载时角速度差和q轴电流差波动更小,恢复至平稳状态更快。
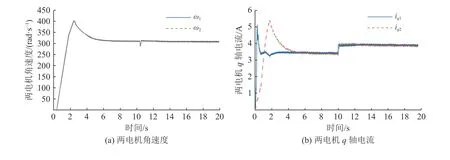
图8 交叉耦合控制下两电机角速度和 q 轴电流Fig.8 The angular velocity and q-axis current of the two motors are controlled by cross coupling
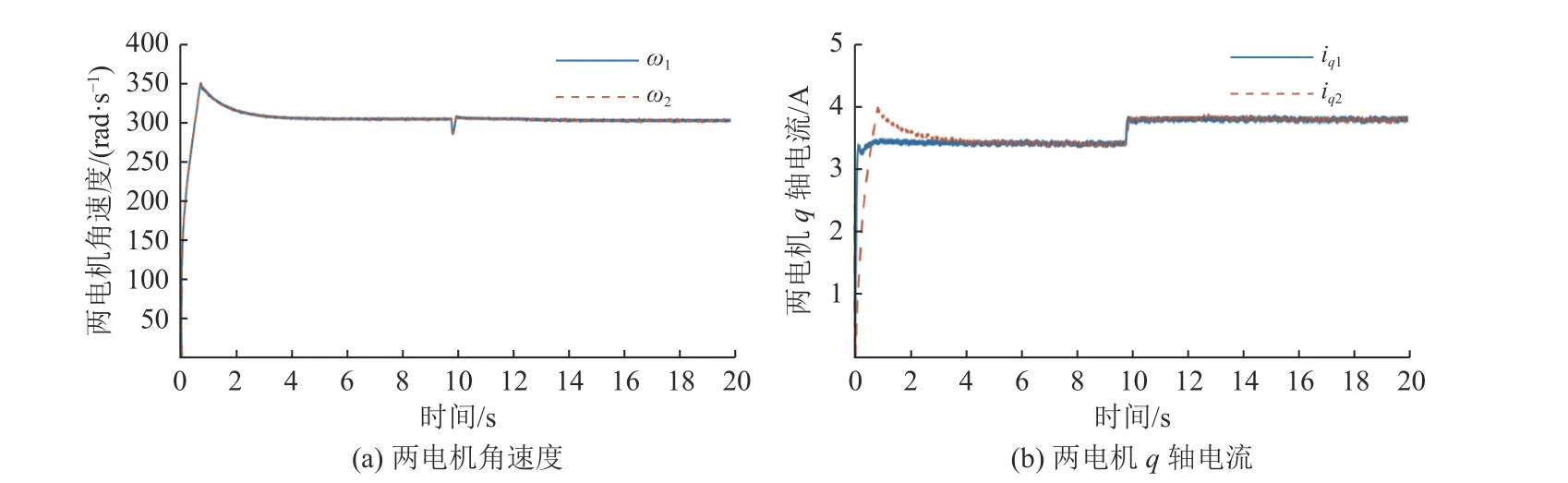
图9 滑模协调控制下两电机角速度和 q 轴电流Fig.9 The angular velocity and q-axis current of the two motors are controlled by sliding mode coordination
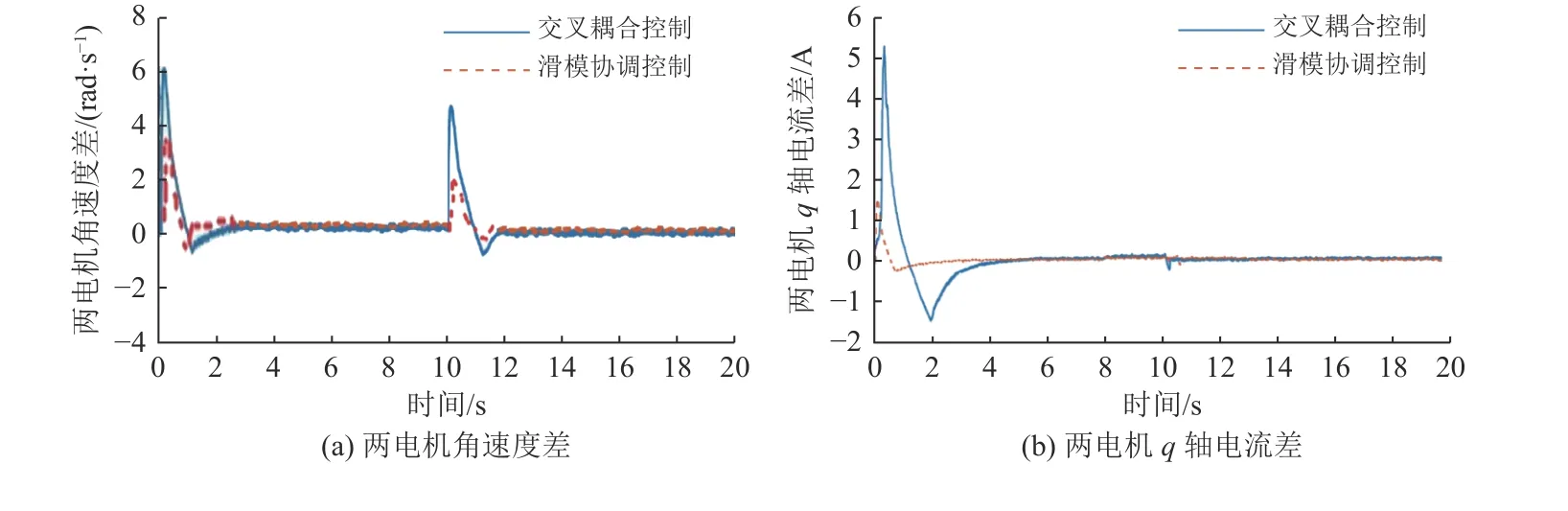
图10 两电机角速度差和 q 轴电流差比较Fig.10 Comparison of angular velocity difference and q-axis current difference between two motors
综上所述,本文针对双永磁同步电机所设计的基于干扰观测器的积分滑模控制器相比于传统的交叉耦合控制具有更好的鲁棒性,启动阶段和突加负载阶段波动更小,恢复至平稳状态更快,角速度差和q轴电流差更小。
4 结语
本文针对具有不确定性和非匹配扰动的双永磁同步电机系统提出了一种基于干扰观测器的积分滑模控制方法,研究双电机系统的协调控制,通过实验成功地证明了所设计的优化协调控制器在转速平衡和转矩平衡方面具有更好的控制性能。总的来说,所提的同步协调控制方法整体性能比交叉耦合控制优越,不但表现在系统拥有更好的动态特性,而且在启动阶段和负载突变时转速和转矩误差更小,具有很强的抗扰动能力,系统结构简单、易实现、可靠性高。