一种数控加工中心自动换刀机械手的研发
2022-07-23王素粉
王素粉 陈 涛
(1.河南科技大学 应用工程学院,三门峡 472000;2.三门峡职业技术学院 汽车学院,三门峡 472000)
加工中心作为目前加工效率最高的数控机床,能否真正发挥其优点,很大程度上取决于自动换刀装置的换刀效率。因此,自动换刀装置(Automatic Tool Changer,ATC)的换刀时间是判断一个加工中心是否先进的重要标志,因此缩短换刀时间对提高我国制造业的自动化水平具有重要作用。弧面凸轮工作轮廓一般是利用空间包络曲面的共轭原理建立三角函数方程进行求解,计算过程太过复杂,且数据量庞大。计算机的出现大大简化了机械设计的过程。因此,文章采用建模软件对弧面凸轮机构建立运动仿真,从而得出其工作轮廓。平面沟槽凸轮结构设计可以根据从动件的运动规律,利用解析法或者作图法绘制其轮廓 曲线[1-2]。
本次设计所需刀具数目为24把,故选用盘式刀库。盘式刀库的结构已趋于标准,故文中不再设计,可选择台湾圣杰生产的BT40刀库。刀库的选刀方式为任意选刀,即在刀库安放刀具时可随意安放。目前,大多数加工中心都采用记忆方式来实现刀具的任意选择。此方法方便快捷,可以显著提高换刀速度。
1 换刀机械手的设计
1.1 换刀机械手手部设计
1.1.1 手爪的设计和计算
手爪机构是靠夹紧力握住刀具的,因此手爪应该具有足够的夹紧力[3-4]。换刀机械手的手爪具有多种形式。选择时,设计人员应该根据具体情况具体分析,再选择机械手的手爪结构。结合本次设计要求,这里采用机械锁刀手爪。这种形式的手爪机构结构简单,不需要其他动力装置锁紧刀具,因此应用广泛。加工中心中自动换刀装置使用通用刀柄,这里采用BT40的刀具型号。刀柄的结构尺寸如图1所示。
1.1.2 弹簧的选择与设计
本次设计中,弹簧主要承受压缩力,且受力不大,仅仅起到防止刀具在运动过程中滑落的作用,故选用第Ⅱ类圆柱形螺旋压缩弹簧[5]。表1为碳素弹簧钢丝Ⅱ组的相关参数。
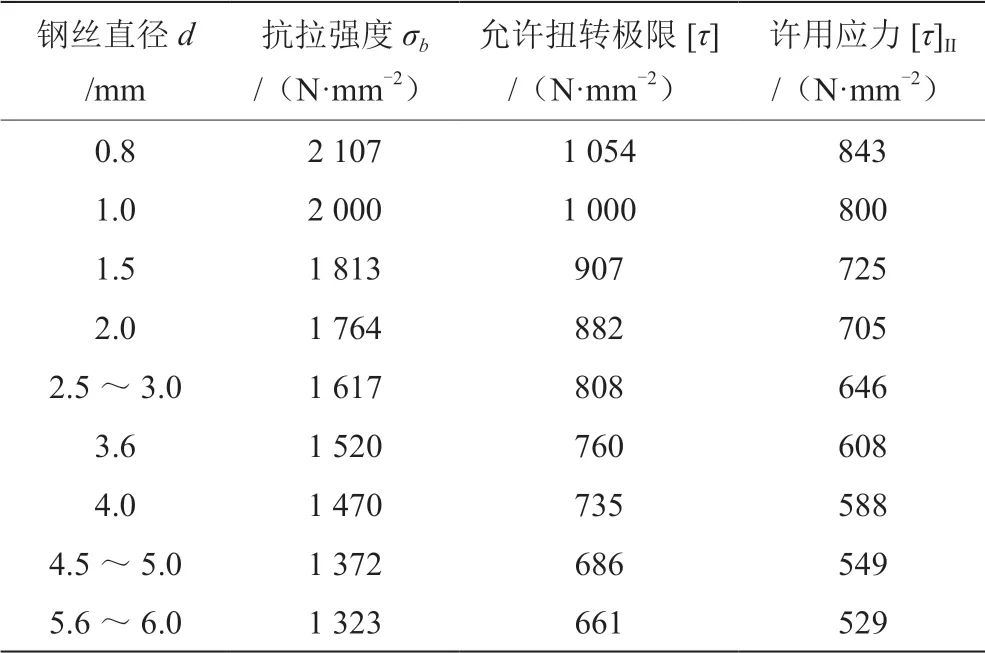
表1 碳素弹簧钢丝Ⅱ组的抗拉强度和许用应力
初选弹簧的直径d=1.5 mm,其中D2=8 mm。经查表1,可以得到[τ]Ⅱ=725 N·mm-2,其最大工作载荷可由式(1)得出:
式中:K为曲度系数,选K=1.30。因此,最大工作载荷为:
1.2 手爪整体尺寸的确定
本次设计计算拟定主轴轴线与刀库轴线的距离为500 mm,即换刀臂的两个抓刀手的中心距为500 mm, 总长度为577 mm。由于已经确定扣刀环尺寸,换刀臂尺寸只需要满足扣刀环的尺寸即可。这里换刀臂选择圣杰刀臂和配件来满足各零件的互换性问题。机械手的整体尺寸如图2所示,机械手三维模型如图3所示。
2 凸轮机构设计和分析
2.1 运动循环图的设计和分析
弧面凸轮和平面沟槽凸轮的运动循环图,如图4所示。转盘运动有4个停歇期和3个分度期,其中3个分度期分别对应机械手逆时针旋转90°、180°和顺时针旋转90°。机械手的运动对应3个停歇过程和2个运动过程,其中2个运动过程分别为下降过程(拔刀动作)和上升过程(插刀动作)。弧面凸轮机构所选用的运动曲线必须保证运动平稳、冲击载荷小、寿命长以及分度精确,有利于减少滚子横越冲击产生的噪声和磨损[6-7]。
2.2 凸轮机构实体建模
弧面凸轮工作轮廓很难使用人们所熟知的制图方法绘制,一般利用空间包络曲面的共轭原理计算[8-9]。
由《机械设计手册》可知,空间包络曲面的共轭原理是分别建立3个不同的坐标系下的三角函数方程,因此计算过程太过复杂,数据量庞大。这里利用建模软件SolidWorks中的Motion分析,在已知机械手运动规律的基础上,通过建立转动盘与弧面凸轮的仿真运动来追踪滚子的运动轨迹,并利用布尔运算切除滚子与凸轮在运动中相交的材料,从而生成弧面凸轮的三维模型,如图5所示。
3 结语
文章根据机械手的工作特点和运动情况,设计合理的运动循环图。通过运用SolidWorks三维建模软件中的Motion分析,结合弧面凸轮在工作中的运动特点,完成整个弧面凸轮的运动仿真,从而生成弧面凸轮的三维模型。与其他驱动方式相比,设计的单臂双手式的弧面凸轮式机械手可以同时完成插刀和拔刀动作,显著提高换刀速度,提高了加工中心的自动化水平。
