基于PLC 和变频器控制电机转速的设计与分析
2022-07-23王成刚
刘 迪,王成刚,王 晶,王 昉
(海军航空大学航空基础学院,山东烟台 264001)
电机是一种非常重要的机械装置,在工农业生产、军事装备、航空航天等领域应用非常广泛。电机的转速是衡量其运行状态的重要参数。如果电机的转速出现了异常,不仅会对生产造成严重的影响,甚至会对人的生命构成威胁。因此,要实时监测电机的转速,以保证电机的正常运行。文中应用PLC(Programmable Logic Controller,可编程逻辑控制器)、变频器、光电编码器的组合进行高速脉冲计数,从而实现对电机转速的监测。PLC 是可编程逻辑控制器的简称,它是一种特殊的计算机,可以用来控制生产过程和机器工作。PLC 利用存储器中存放的指令来完成开关控制、定时、计数和数据处理等操作[1-3]。PLC 避免了大量的电路接线,体积比较小,价格相对便宜,而且可靠性比较高,灵活性比较好。当前,变频调速技术普遍认为是最具有发展前景的调速技术。该技术可以提高生产效率、降低成本、改善产品质量。变频调速技术发展迅速,已成为工业生产现代化的重要标志。
1 系统的硬件选择
1.1 PLC的选择
PLC 内部具有PID 控制模块,一些简单的系统可以直接使用。对于比较复杂的系统,需要设计PID控制来得到满意的结果。欧姆龙公司生产的C200H是一款高速度紧凑型PLC,用户可以根据被控对象自行设计PID参数,进而完成逻辑控制[4-6]。C200HPLC具有两种扩展功能:第一种是在母版上利用I/O 口扩展母版,最多可以扩展两个母版,采用串联的方式连接;第二种是建立远程I/O 系统,在母版上设置远程I/O 主单元,在扩展母版上设置远程I/O 从单元,这样既可以扩展系统的I/O 口,又可以控制远程I/O 口。
1.2 变频器的选择
变频器的选择要从实际应用和性价比两个方面来考虑,选取欧姆龙公司的3G3JV 变频器[5]。变频器的标准接线如图1 所示。

图1 变频器的标准接线图
变频器主要由主回路和控制回路两部分组成。其中,主回路主要由整流器、平波电路和逆变器三部分组成。控制回路的作用是实现对逆变器的开关控制,对整流器的电压控制以及完成各种保护功能[7-8]。变频器简化结构图如图2 所示。

图2 变频器简化结构图
电动机转子旋转的原理:向三相异步电动机的定子三相绕组上通入三相对称交流电,将会在定子、转子和它们之间的间隙中产生一个沿定子内圆旋转的磁场,三相定子绕组将切割磁力线,这样就会在定子绕组中产生感应电动势和感应电流,定子绕组中的感应电流与旋转磁场相互作用产生电磁力,进而形成电磁转矩。当将三相对称交流电中的任意两相对调,就可以使旋转磁场的转向发生改变,从而改变电动机转子的转向[9-11]。
三相异步电动机转子的转速为:

式中,s是转差率,p是磁极对数。当s和p一定时,转子转速n由电流频率来决定。如果能连续改变电流频率,就能够平滑地改变电动机转子的转速,从而实现无极调速。
2 系统的工作原理
该系统将PLC 与变频调速技术相结合,利用数字PID 控制方法来实现对电机转速的控制。该系统采用单闭环控制,设定速度值与实际速度值之间的偏差,该偏差信号经过A/D 转换器后,成为数字信号输送给PLC,再利用PID 控制算法进行运算,将数字量经过D/A 转换为模拟量后控制变频器的输出频率,进而控制电动机的转速,随后将转速反馈给PLC,经比较后输出给变频器,从而实现无静差调速[12-14]。控制系统的结构图如图3 所示。
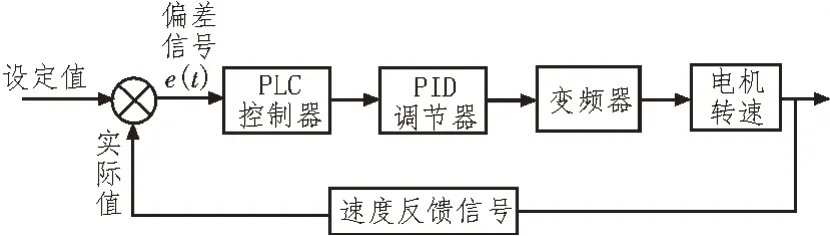
图3 单闭环PID控制系统结构图
将电动机的转轴与旋转圆盘相连,电动机转轴旋转同时带动圆盘旋转,产生相应的转速信号。该设计采用霍尔效应来计算转速,霍尔效应原理图如图4 所示。首先,设置一个均匀的磁场,磁感应强度为B。在均匀的磁场中放一个半导体薄片,该薄片被定义为霍尔元件。当电流从薄片上流过时,磁场力FL作用在电子上,使电子偏移到一侧,因此在这一侧就形成了电子的累积,而正电荷则累积到了另一侧,这样就会在半导体薄片上产生一个横向电场,该电场就是霍尔电场。霍尔电场的电动势称作霍尔电动势EH,该现象被定义为霍尔效应。电流越大,磁场越强,霍尔电动势就越高[15-17]。
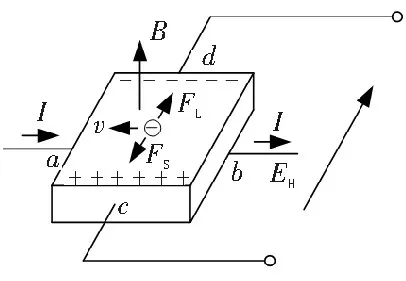
图4 霍尔效应原理图
通常,霍尔元件包括锗、N 型硅(Si)、砷化铟(InAs)和锑化铟(InSb)等。霍尔元件通常做成正方形,是一种四端半导体薄片。将两对电极引出线以对称的方式焊接在霍尔元件的两侧。其中一对是激励电极,用来激励电压;另一对是霍尔电极,主要用来输出霍尔电动势。在激励电流恒定的条件下,磁感应强度的大小发生了突变,输出电压也会发生突变,这样会产生一个脉冲信号。在单位时间里,电机的转速与产生的脉冲数是相对应的,这样就构成了霍尔转速传感器。图5 所示为霍尔式转速传感器工作原理图。永磁体黏贴在圆盘的边缘,每个永磁体都会形成一个小磁场,将霍尔元件固定在永磁体路径附近[18-20]。圆盘与电机的转轴相连,当圆盘转动时,永磁体也随之转动,经过霍尔元件时使霍尔电动势发生突变。永磁体的数目越多,测量精度就越高。电机的转轴带动圆盘旋转,设采样时间为T,圆盘转动一周所输出的脉冲数是q,在时间T内所测量到的脉冲数是m,电机的转速(转速的单位是r/min)为:

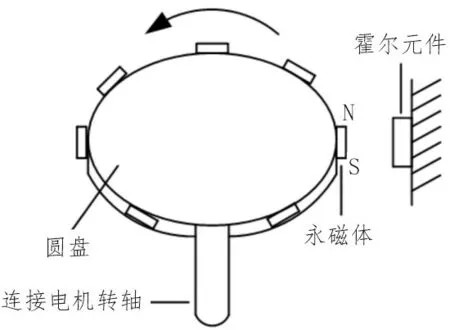
图5 霍尔式转速传感器工作原理图
3 控制算法及程序流程
3.1 控制算法
PLC 选用欧姆龙公司的C200H,PLC 中有内置PID 控制器用来调节输出,保证偏差e为零,这样才能保证系统稳定。PID 控制算法的计算公式如下:
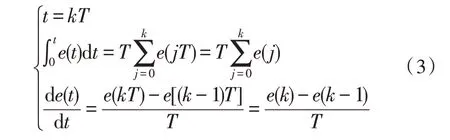
式中,k是采样序号,k=1,2,…,T是采样周期。
将e(kT)表示为e(k),可得离散化PID 表达式为:

式中,u(k)是第k次采样时刻的输出值;e(k)是第k次采样时刻输入的偏差值;e(k-1)是第k-1 次采样时刻输入的偏差值;KI是积分系数,KD是微分系数,是积分时间,TD是微分时间。
3.2 程序流程
设计的程序流程分为3 个部分:主程序、子程序和中断程序。主程序包括数据处理和逻辑运算。初始化子程序完成系统的初始化,定时器中断程序完成定时采样和输出控制,利用A/D 转换器将偏差信号离散化和数字化。根据参数的给定值,完成PID控制运算,随后利用D/A 转换器将控制量转化为模拟量,控制变频器,进而控制电机的转速。程序流程图如图6 所示。
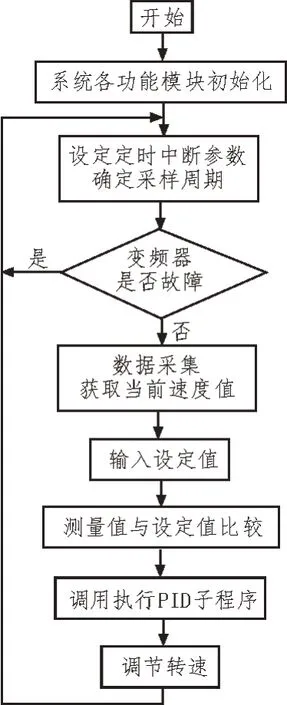
图6 程序流程图
4 实验结果
确定合适的比例、积分和微分系数,改善动态特性,达到比较满意的指标。经过实验,当比例系数为7、积分时间为0.3 s、微分时间为0.05 s 时,能得到比较满意的控制效果。电机旋转磁场的磁极对数是2,磁极数是4,转子的转速略慢于旋转磁场的转速,转子转速测量表如表1 所示。
实验在理论研究的基础上以可编程控制器作为实验平台,设计了闭环变频调速系统。通过对电机控制系统的设计以及实验系统的搭建和调试,对系统进行了验证。从表1 看出,在转子速度比较低时,相对误差比较大;当转子速度达到1 800 r/min 以上时,相对误差比较小,在1%以内,基本上满足调速的指标,达到了预期的效果。从转速测量表中可以观察到,开环系统的响应速度较快,但精度不高;闭环系统精度较好,但响应较慢,且对设备的要求也相对复杂。于是可以得出结论,在对精度要求不高情况下,使用开环控制系统,但在对精度有较高要求情况下则应采用闭环控制系统。
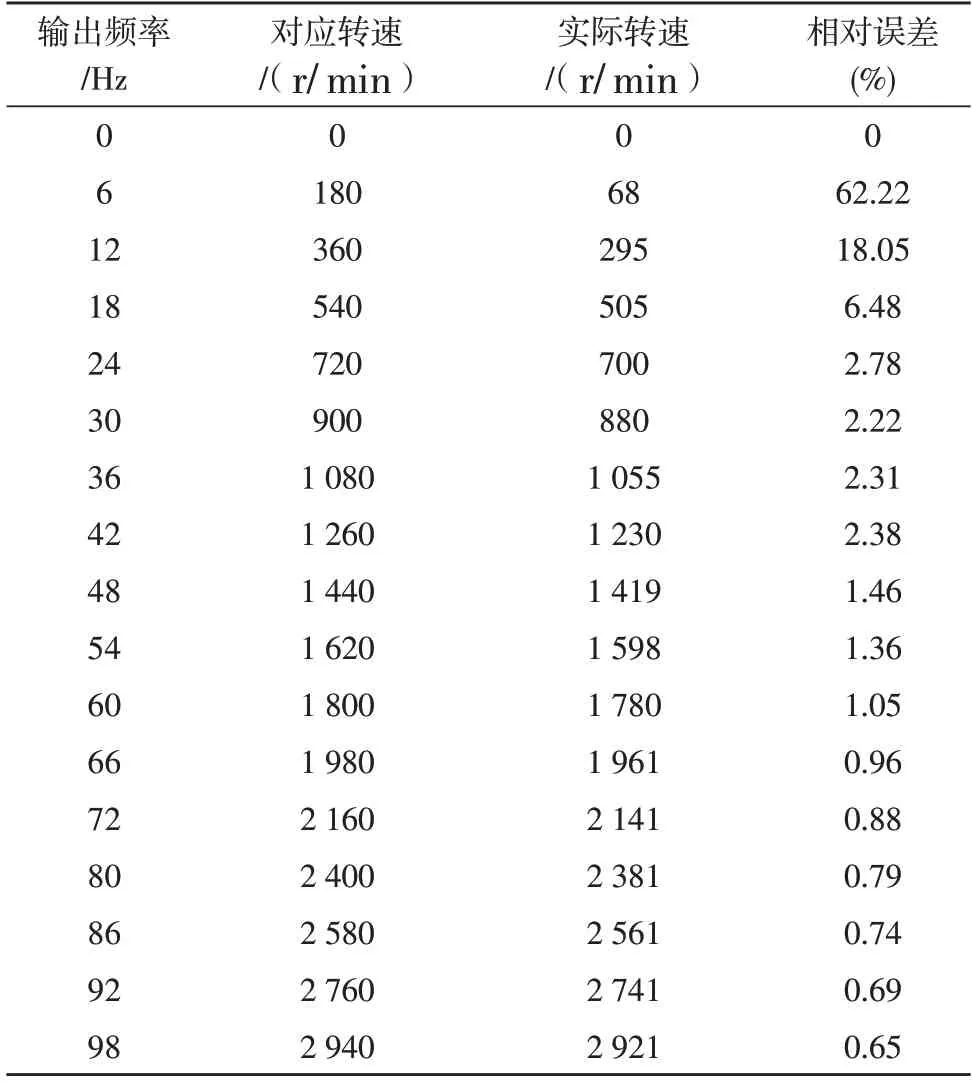
表1 转速测量表
5 结论
转速是电机的一个重要参数,是指电机转子的旋转速度,在工业生产中对电机转速的测量很重要,要对电机进行保护,防止发生事故,因此,要实时监测电机的转速以保证电机的正常运行。该设计将PLC 与变频调速技术相结合,利用数字PID 控制方法来实现对电机转速的控制,通过光电编码器对转速进行测量。通过实验,得到了比较满意的控制效果。
