多目标海洋捕食者算法的污水处理优化控制
2022-07-20崔心惠李文萱朱山川张祝威
崔心惠,李文萱,朱山川,张祝威
(1.滁州职业技术学院电气工程学院,安徽滁州 239000;2.南京电研电力自动化股份有限公司,江苏南京 210000)
水污染导致日益凸显的生态环境问题,已成为危害国民生命健康的关键问题之一[1]. 城市污水处理总量在人口不断增长和经济快速发展的过程中持续攀升,与此同时节能环保政策的实施力度也加大了对出水水质的严格把控. 由此可见,城市生活污水治理问题的好坏是决定人类未来生态环境质量高低的直接因素,而污水处理可有效缓解水资源匮乏以及减少环境污染问题. 在污水处理过程中广受学者关注的一种生物处理技术称为活性污泥法,其中溶解氧浓度(DO)、生化需氧量(BOD)、氨氮、化学需氧量(COD)等多种过程参数均是衡量污水处理过程中的重要指标. 因此,如何保证出水水质满足污水排放要求并且尽可能地降低运行能源损失,就成为污水处理优化控制中亟待解决的问题[2-7].
针对污水处理过程中溶解氧控制问题,曹守启等[8]利用粒子群优化算法对模糊参数进行修正进而提出一种溶解氧调控系统,对溶解氧的调控较其他算法更稳定,具有超调量低、响应速度更快的特点.而在污水处理过程中,缺氧和好氧环境并存且缺氧池的反硝化反应对出水水质的浓度有着直接影响,其中硝态氮是作为评估脱氮效果的重要指标. 因此,控制硝态氮浓度在合理的区域内,是进一步提高出水水质和降低能耗的前提. 无疑,污水处理优化控制的目的是在众多受到排放指标限制且不断变化的重要水质参数的约束条件下实现节能降耗,所以多目标优化控制在强耦合污水处理过程中的研究至关重要[9-10].
城市污水处理过程的多目标优化问题中,包含多个相制约、相耦合、甚至相矛盾的待优化的子目标. 其本质是以问题为基点,模拟生物演化规律和机理. 目前群智能优化算法因其固有的并行搜索能力逐渐被应用于求解复杂问题. 赵杨等[11]为了改善出水水质不达标和能耗过高问题,从变异策略和参数更新两个方面对差分进化算法进行改进,提升了Pareto 解的多样化,可有效满足优化控制要求. 在多变量优化控制中,卢薇[12]将动态惯性权重加入多目标粒子群(MOPSO)算法,既能使局部和全局之间搜索能力达到平衡,还能提升了算法的收敛速度以及精度;将算法用于BSM1 仿真模型后,实现了出水水质浓度和能耗的有效降低,表明该方法具有良好的优化控制性能. 张璐等[13]提出了一种动态分解多目标粒子群优化控制策略(OC-DDMOPSO)来获取操纵变量最优设定值,在自适应核函数的性能指标模型基础上,达到污水处理过程优化控制目的,并在BSM1 仿真平台上验证可以实现改进水质、减小能耗效果. 赵小强等[14]提出一种改进的多目标布谷鸟算法对溶解氧以及硝态氮参数进行寻优,既增加种群多样性,又提高了跳出局部最优的可能性,实验证明该方法满足降低能耗要求. 然而,通过多目标控制策略来获取精准的控制变量优化设定值仍需进一步加强,所以针对具有挑战性的污水处理过程中的多目标优化问题,本文引入贪婪机制和拥挤度计算对海洋捕食者算法进行改进,将尽可能多的解均匀覆盖在Pareto 前沿,从而获取最优溶解氧和硝态氮浓度设定值,采用PID 控制器对其进行跟踪控制,解决多目标污水处理优化控制难的问题.
1 污水处理过程特性分析
1.1 BSM1仿真模型
污水处理过程是一个动态、时滞、强耦合的非线性系统.微小的输入波动都可能导致系统的输出偏离,其中污水进水流量、污染组分繁杂以及各成分含量不稳定、污染负荷变化不确定、雷暴雨环境等都是造成污水处理过程庞杂的直接因素.如何对这些变量给予更好的评估且为污水处理系统提供更好的控制策略尤为重要.由此,欧盟科学技术与合作组织(COST)及国际水协会(IWA)共同定义并研发了“仿真基准模型”(Benchmark Simulation Model No.1,BSM1)[15-16],该模型专注于污水处理中各因素的动态变化模拟过程,其结构布局如图1所示.生化反应池和二沉池组成主体结构,前者池内发生的反应用活性污泥ASM1模型来进行模拟,将整个生化反应池分为五个单元,分别为两个容积为1 000 m³的缺氧池单元和三个容积为1 333 m³的好氧池单元;后者则利用二次指数沉淀速率来模拟污水的固液分离过程.经过生化反应池处理后的混合液,部分回流至第一单元,保证了曝气池中悬浮物浓度一定,维持活性污泥系统稳定运行[17];剩余的通过二沉池进行上层清水的排除和下层底部污泥的少量排出.

图1 BSM1模型结构布局
ASM1 内含13 种物质组分和8 个生化反应过程,充分呈现污水处理动态反应的机理特征. 由于过高的氮元素是导致水体富营养化的直接因素,水体污染对人类生活、生产发展以及生态发展起到一定的制约作用. 在生化反应池中,缺氧和好氧两部分分别进行反硝化和硝化反应,主要目的是对导致水体富营养化的氮元素进行转化,达到提升水质的效果.
缺氧池中的硝态氮是由好氧池中反应生成的硝态氮通过混合液回流而来,到达缺氧池后与进水流量汇集并于池中开始反硝化反应. 因此,有效控制好氧池的回流量是保证缺氧池中硝态氮在合理范围值内且出水总氮达到排放要求的前提[18]. 回流量过大会促使缺氧池内的硝态氮浓度增加,同时可生物降解有机物的浓度会有所降低,减弱反硝化能力;回流量过小影响可生物降解有机物能力而无法充分反应. 在好氧池中,硝化菌把氧作为电子受体完成硝化反应去除水体中的氨氮. 溶解氧过低致使电子受体不足抑制硝化反应,此时丝状菌将会迅速繁殖加速污泥膨胀;溶解氧浓度过高时会出现两种情况:一是持续的鼓风机曝气带来的过度能耗损失,二是混合液回流中掺杂的溶解氧对缺氧池内反应环境的改变. 在此期间,曝气能耗不仅影响溶解氧浓度还占污水处理厂总能耗的60%以上[19]. 所以通过适当调节曝气量来控制溶解氧浓度是保证硝化反应正常进行以及降低能耗的关键手段.
1.2 污水处理能耗和水质模型
实际的工程领域中,往往需要求解的问题不止一个. 而污水处理过程的优化控制目的是在出水水质满足规定排放要求下尽可能地缩减能耗. 若要达到出水水质的正常排放要求,电气控制设备需要长期运行进而导致能耗的增加;若要能耗尽可能的达到最少,意味反应过程的不完全,即出水水质超出规定值进而造成罚款. 这是一组相互矛盾的目标指标,需要对其建模来实现进一步分析. 该模型主要存在两个方面的能耗,分别为曝气能耗(Aeration Energy)和泵送能耗(Pumping Energy). 将能耗模型优化定义为[20]:

其中:EC代表总能耗,AE代表曝气过程产生的能耗即曝气能耗,PE代表运送污泥所产生的能耗即泵送能耗. 根据污水处理过程中的模型参数和反应变量,AE和PE分别定义为[20]:

其中:t0为开始时间,tf为结束时间,T为采样周期,Vi为第i个生化反应单元的体积,KLai为第i个生化反应单元的曝气量,SO,sat为溶解氧饱和浓度,Qa为内回流流量,Qr为外回流流量,Qw为剩余污泥流量.
活性污泥法的出水水质是对污水处理过程的除污效果的综合性评价指标,也是对受纳水体排放污染物所需支付的费用.EQ值越小,表征出水水质越好且所需处理费用更少,按基准定义如下[20]:

式中:SSe(t)为第t时刻出水固体悬浮物浓度;CODe(t)为第t时刻出水化学需氧量浓度;SNkj,e(t)为第t时刻出水凯氏氮浓度;SNO,e(t)为第t时刻出水硝态氮浓度;BODe(t)为第t时刻出水生化需氧量浓度.
由算式(1)-(4)可知,EC与KLai和Qa有关,EQ与五种出水水质参数化有关. 好氧池中的溶解氧浓度SO大小由KLai决定,缺氧池中硝态氮浓度SNO由Qa决定. 恰当的SO既能保证好氧区的微生物充分吸附和氧化分解有机污染物,还能降低曝气能耗.同样,恰当的SNO不仅可以保证反硝化反应的顺序进行,达到良好的脱氮效果,还降低了泵送能耗. 由于污水处理中的能耗和出水水质指标的优化问题实质上归类于多目标优化问题,设x1为溶解氧浓度设定值,x2为硝态氮浓度设定值,x=[x1,x2]是两个寻优设定值形成的组合向量,fEQ和fEC分别为优化向量间的函数表达式.污水处理优化多目标可描述为:

其中:Ntot为总氮浓度,SNH为氨氮浓度. 在满足上述约束条件外,还需要对优化设定的溶解氧浓度值和硝态氮值进行上下限值,由此建立多目标最小化问题.
2 污水处理多目标优化控制
2.1 海洋捕食者算法
海洋捕食者算法(Marine Predators Algorithm,MPA)是由Faramarzi等人于2020年根据海洋适者生存理论提出的一种高效元启发算法[21]. 海洋捕食者通过交替的Lévy 和布朗游走选择出最优的觅食策略. 首先需要将猎物位置进行初始化并均匀分布于搜索空间[22],数学描述如下:

式中Xmax、Xmin为搜索空间范围.
根据捕食者和猎物相遇时的速度比将MPA 分为三个阶段.
阶段1:捕食者运动速度大于猎物速度时(V≥10)为迭代初期,此时捕食者处于勘探策略基本不动,数学模型如下:
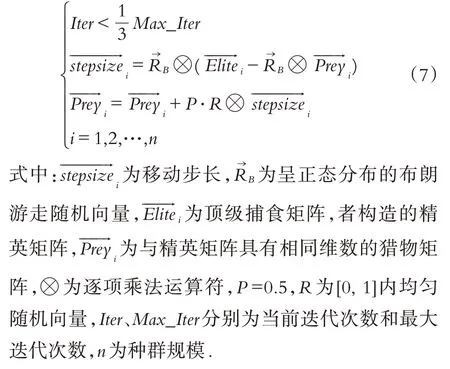
阶段2:捕食者与猎物运动速度相同时(V=1)为迭代中期,此阶段勘探和开发的重要性并存. 猎物以Lévy 游走策略负责开发而捕食者以布朗运动负责勘探,数学描述如下:
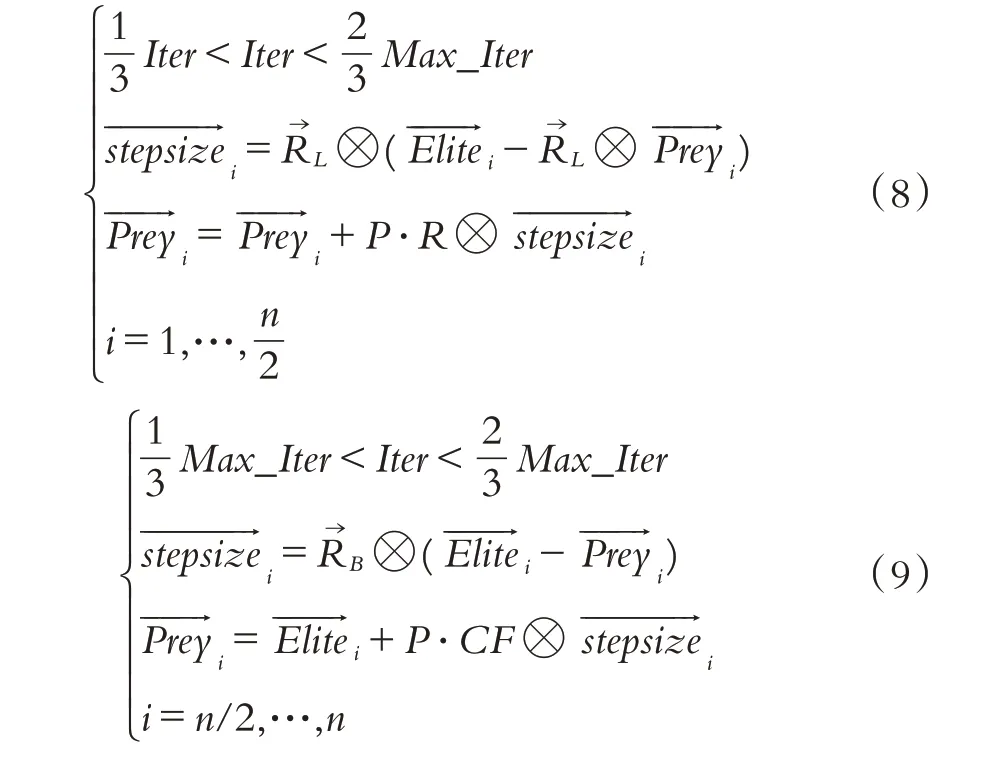
式中:RL为Lévy 分布的随机向量,CF为控制捕食者移动步长的自适应参数,满足CF=(1-Iter/Max_Iter)2×Iter/Max_Iter.
阶段3:捕食者比猎物移动速度慢时(V=0.1)为迭代中期,此时捕食者处于Lévy 运动开发策略.数学描述如下:

除上述阶段外,鱼类聚集装置(FADs)或涡流效应也会对捕食者觅食行为产生影响.这使得MPA在寻优过程中可及时跳出局部,降低早熟收敛发生的概率.其数学描述如下:

式中:FADs=0.2,表示受到FADs影响的概率;U为随机生成的向量数组,若数组小于0.2则将其更改为0,反之改为1;r为[0,1]内随机数;r1、r2为猎物矩阵的随机索引.
2.2 多目标海洋捕食者算法(MOMPA)
工程领域绝大部分问题都是由多个目标函数组成,仅依靠某一个最优目标值决定优劣关系是不合理的. 通过比较非支配排序关系可把种群中所存在的不被其他任何个体支配的解集放在目标空间映射中形成Pareto 前沿. 由于海洋捕食者算法在迭代寻优Pareto 解的过程中易出现收敛速度较慢且寻优过程稳定性不足等问题,本文从解集选择上引入贪婪策略和拥挤度计算对标准海洋捕食者算法进行改进.
贪婪策略是在迭代过程中选择出当前最优解并将其与上一次最优解进行比较从而获得全局最优解的过程. 而Pareto 前沿是全局解与局部解并存形成的,二者仅在非支配范围有所区分. 前者在所属完整决策空间内是Pareto 非支配,后者在其邻域范围内是Pareto 非支配. 贪婪策略通过对非支配最优解的比较、存储以及更新获取一组非支配最优解. 更新如下:
(1)若当前迭代中产生一组新解比存档中的解更好,则当前解可输入存储.
(2)若种群更新后的新解支配存档空间内的一个或多个解,应将存档中被支配的解删除并替换为该新解.
(3)若种群更新后的新解与存档中的解为非支配关系,则新解决也应作为Pareto 解中的一员添加到存档中.
上述存档更新确保了所有解都领先于其他解.当存档容量不足时,若仍有新解满足更新标准,该解将无法进行存储进而导致最优解的丢失. 此时,需在存档中随机删除一个解. 考虑到移除其他解的过程应对Pareto 解集分布的均匀性影响最小,本文采取对每个解都考虑一个预定义的距离,通过计算该距离内解的数量来衡量其各自的拥挤度.计算式为:
假设图中小圆为存档中任意解,计算其固定距离范围内解的数量并对数量进行排序. 若数值越多则解所在区域拥挤度较高,应首选为需要待消除的解[23]. 反之,意味拥挤度较小,需要尽可能保存此类解,而拥堵最少的区域应只有一个解,具体如图2所示.

图2 移除最佳解过程图
最后根据拥挤程度用轮盘赌的方法选择其中一个待消除的解.每个解被选择的概率公式为:

其中:K>1,Ni表示存档中第i个解的相邻解的数量,Pi表示第i个解被选择的概率.
新旧解更替增加了种群多样性,扩大了跳出局部解的概率,并加快了算法收敛速度.图3是多目标海洋捕食者算法流程图.

图3 多目标海洋捕食者算法流程图
3 仿真实验
3.1 MOMPA算法测试实验
选择合适的函数对优化算法的性能和有效性进行测试是必不可少的重要环节. 本文选取CEC2019多模态多目标基准函数中的6个函数对MOMPA 算法寻优过程中的性能进行验证,并用MOMPA 算法中的反世代距离(Inverted Generational Distance,IGD)和Pareto 邻近度倒数(the reciprocal of Pareto proximity,rPSP)指标作为多目标优化算法的评估标准.IGD指标值越小表明Pareto 前沿所求值与真实值相接近,多目标优化算法的多样性和收敛性越好. 反之,表明两值相差远,偏离大,分布性较差. 公式如下[24-25]:

式中:P★为优化算法所求的近似Pareto 前沿,P为真实Pareto 前沿,mindis(x,P)为x和P的最小欧式距离. 而rPSP则反映了计算和真实的Pareto 解之间的收敛性和覆盖率. 从CEC2019 系列中选出6 种测试函数参数信息如表1所示.

表1 6种CEC2019测试函数参数信息
将多目标海洋捕食者算法与其他几种优化算法进行对比,具体参数设置如表2所示.

表2 不同多目标优化算法的参数设置
为了更形象地对比各算法在CEC2019 测试函数上的逼近效果,选取测试函数中具有代表性的双目标测试函数MMF8 和三目标测试函数MMF15 来进一步说明各算法收敛效果. 本次算法将单独运行20次,迭代100次,其收敛图如图4和图5所示.
从图4和图5可以看出,在双目标和三目标测试函数上,MOMPA 算法寻优的解在Pareto 前沿上分布较为匀称且覆盖率更广,保证了解的多样性且均能获得最优解;同时与标准Pareto 最优解数值相接近,能够收敛于Pareto 前沿. 因此,MOMPA 算法可在解集中获取范围、质量以及分布上更好地解来解决多目标问题,给出水水质达标和能耗最小值提供了更最多选择的可能性.

图4 不同算法在MMF8上Pareto最优解集

图5 不同算法在MMF15上Pareto最优解集
MOMPA 与 MOPSO、MODA、MOALO、MOMVO 和MSSA 算法在测试函数中的IGD和rPSP值如表3 和表4 所示. 从表3 和表4 的测试结果可以看出,本文所提出的MOMPA 算法整体IGD 均值和方差在MMF1、MMF2、MMF3、MMF8、MMF12都优于MOEA/D、MODA、MOALO、MOMVO、MSSA,虽然在MMF15 上略有不足但相差甚微. 在rPSP数值中,MOMPA和MOEA/D表现出较好的解的覆盖率,二者对比下MOMPA 的rPSP指标更小且满足大部分测试函数. 以上分析表明,MOMPA 算法在收敛性和多样性上具有一定的优越性.
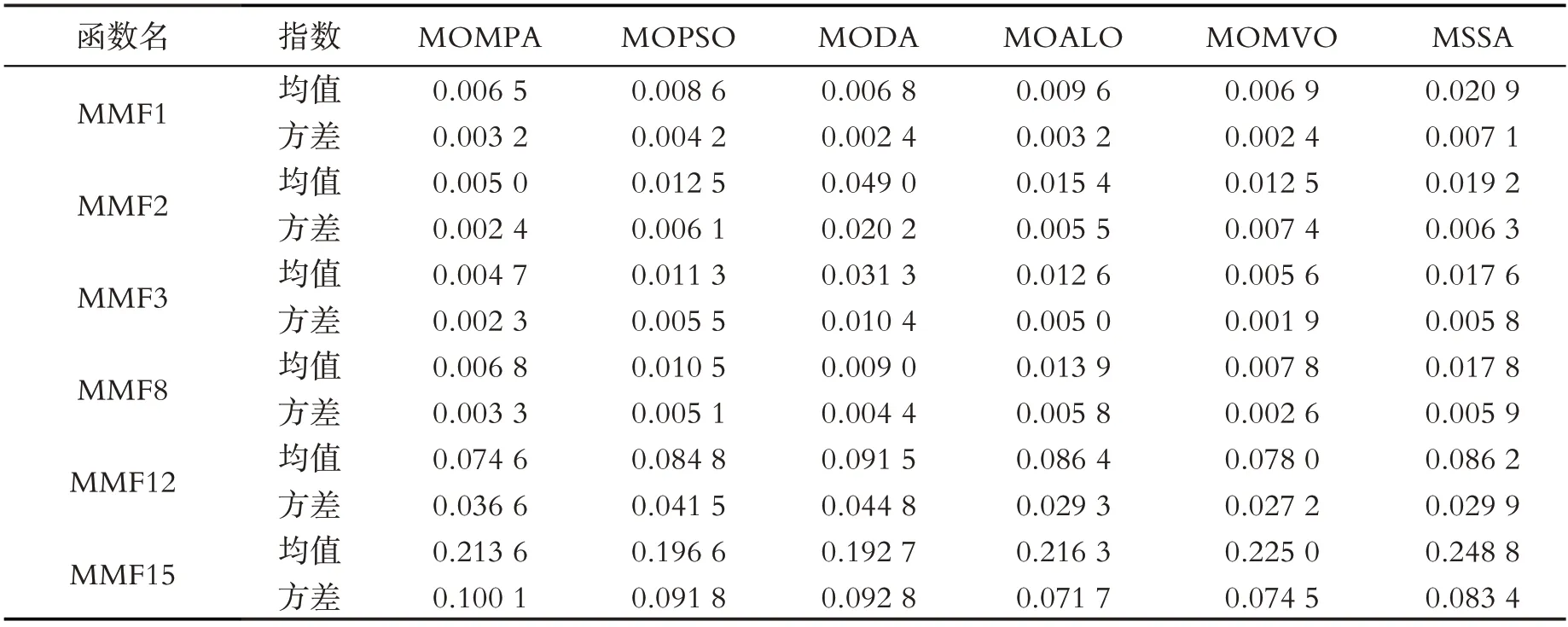
表3 不同优化算法的IGD值
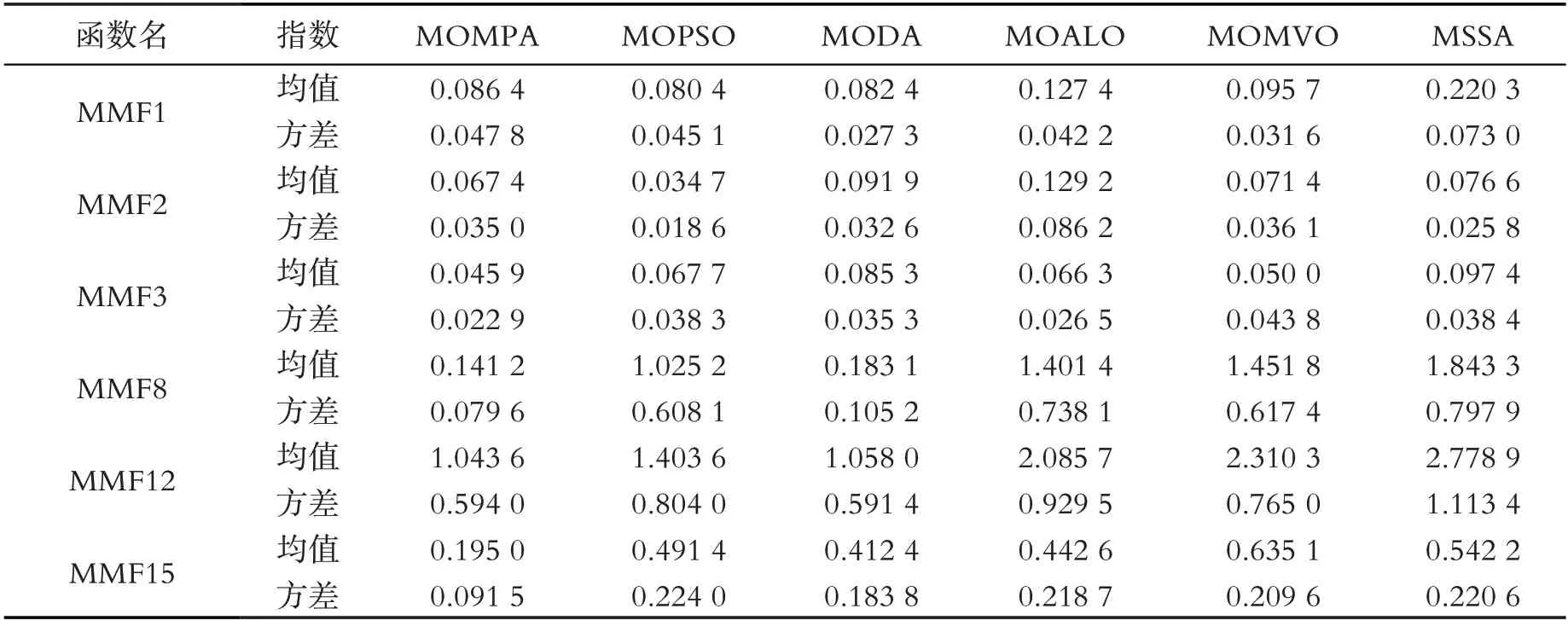
表4 不同优化算法的rPSP值
3.2 污水处理BSM1仿真
为了验证MOMPA 的有效性,将该算法应用于BSM1 仿真平台,设置总的优化周期为14 d,性能指标优化周期为2 h,每个采样间隔为15 min. 选取仿真数据分别是晴天、雨天和暴雨天下的污水数据.其中SO和SNO的优化范围分别是0 ~2.5 mg/L 和0 ~2 mg/L.图7给出MOMPA算法在晴天数据下对污水处理中SO和SNO优化控制曲线和误差图.
从图7 可看出,在晴天天气下,出水水质指标相对来说变化过程较平稳. 多目标海洋捕食者优化算法根据系统实际运行状态呈现良好的跟踪控制效果,跟踪轨迹和设定值变化过程基本吻合,出水水质参数整体排放浓度的平均值在污水排放指标范围内,达到了污水处理过程中的约束条件,验证了MOMPA 在污水处理优化中的优越性,是进一步确保能耗达到最佳处理效果的先决条件.
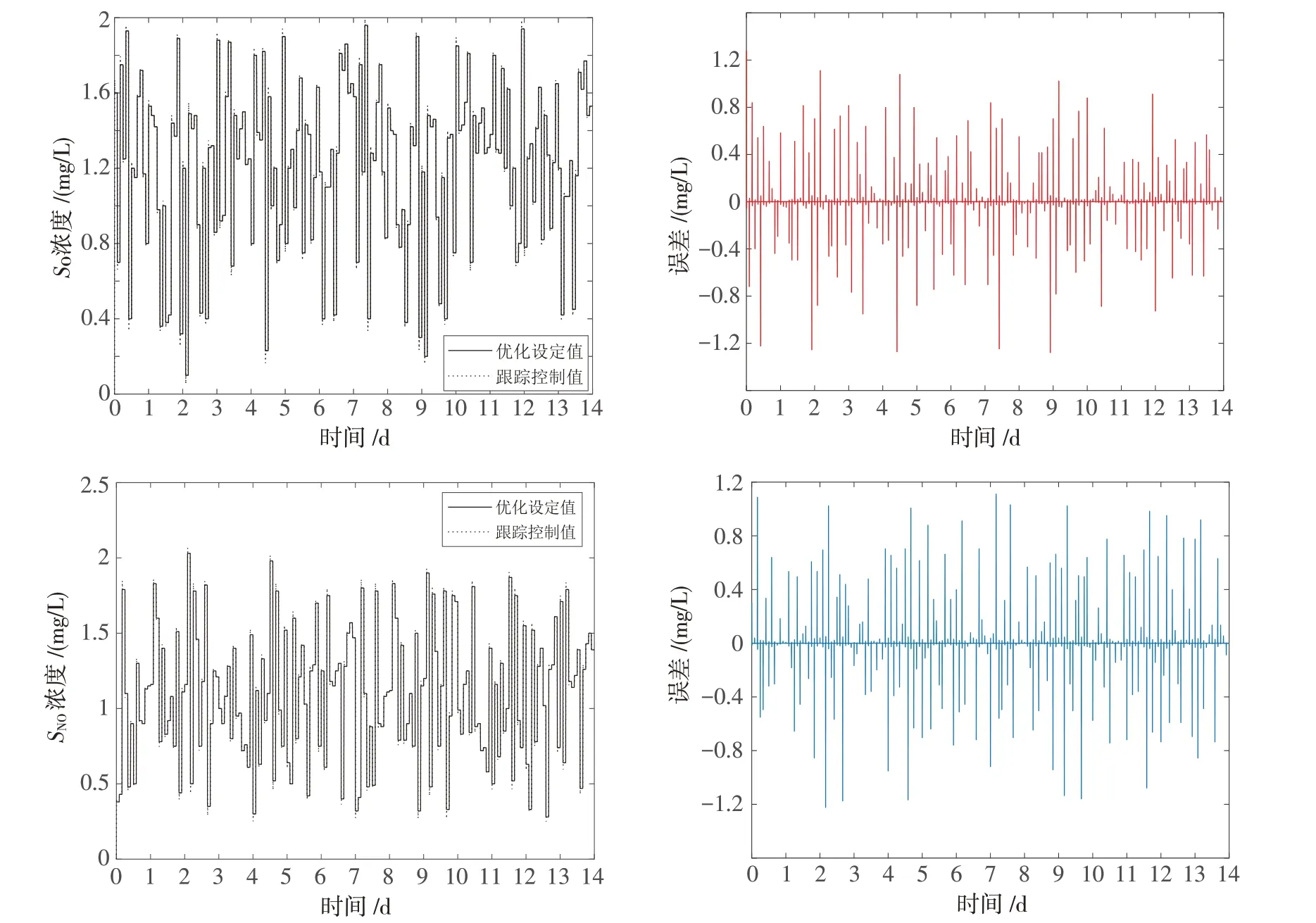
图7 晴天SO、SNO优化控制曲线和误差图
4 结语
污水处理是一个动态的、强耦合的多变量多目标复杂系统,多目标优化污水处理问题解决的是可同时获取使能耗和出水水质达到最佳效果的解. 针对二者组合优化问题,提出一种多目标海洋捕食者算法的污水处理优化控制方法,通过机理分析和仿真实验得出结论有:
(1)鉴于海洋捕食者算法在迭代中不易跳出局部最优致使全局搜索能力受到限制,在保证MPA 算法本身机制的同时引入贪婪策略来保存寻优过程中发现的最佳非支配解,并通过拥挤度的计算对比将更优的解与内部存档中的最优解进行更替,提出了一种多目标海洋捕食者算法,使得解集均匀分布在Pareto 前沿,有助于提高解的覆盖率;用CEC2019测试函数验证MOMPA 算法性能的有效性且提高了算法的收敛速度.
(2)在BSM1仿真平台上,通过MOMPA 算法对污水处理过程中的SO与SNO的设定值不断寻优,结果表明MOMPA 算法与其他算法相比具有很强的竞争力,不仅使得污水处理中出水水质达到排放要求而且能耗显著降低.
