基于GNS S 技术的露天边坡变形自动监测系统
2022-07-20陈子江
陈子江
(贵州地矿基础工程有限公司,贵州 贵阳 550081)
0.引言
随着开采深度的增大,边坡的陡峭程度也会随之增大,逐渐增加了安全生产的难度,但要想提高矿产的经济效益,就必须把坡角再加大一些,这就会导致安全生产和经济效益产生严重冲突。因此,对露天矿边坡进行持续的变形监测和预警具有十分重要的意义,而露天矿山的地表位移监测工作周期较长,同时矿山环境复杂受不确定因素影响,地表变形预测的准确度偏低。基于当前现状,许多学者都研究了露天边坡变形监测方法,其中,李耀楠[1]等研究了基于综合分析法的露天矿边坡稳定性分析方法,该方法预先进行实际调查,通过赤平投影法找到边坡可能发生破坏的位置,运用极限平衡法计算,实现了边坡变形监测;宁永香[2]等研究了矿山边坡地表变形的PSO-ELM预测模型,该模型建立基于粒子群优化与极限学习机算法,计算影响因素与地表变形数值之间的耦合关系,并建立预测模型,实现变形自动监测。现有监测方法虽能够实现露天边坡变形监测,但是监测效果不是很好。
GNSS技术是一种全新的现代空间定位技术,该技术能够实时提供观测点的三维位置,受到天气的影响较小,并且能够全球、全天候、全天时地提供定位信息,定位精度较高。基于这个优点,GNSS技术在边坡监测中应用越来越广泛,为此设计一个基于GNSS技术的露天边坡变形自动监测系统,以提高边坡监测的效果,提高矿山开采的安全性。
1.基于GNSS 技术的露天边坡变形自动监测系统框架
此次研究系统在设计前,对露天矿山边坡监控的工程实践进行了研究和分析,并对监测资料做了深入的探讨。基于分析,确定所研究系统的基本功能:
(1)具备数据采集、显示、查询、平移、放大、缩小、打印输出等基础功能;
(2)能够组织和管理多源数据,如,露天矿地形资料、露天矿边坡面位移监测资料、地质资料、露天矿区域遥感资料、露天矿航空摄影影像资料等,并能够建立数据库、链接、复制等;
(3)绘制露天矿山边坡坡体的变形趋势[3];
(4)计算露天矿山边坡的变形,预测边坡位移,对边坡风险分区分级。
2.露天边坡变形自动监测系统硬件设计
系统的硬件平台采用模块化的设计思想,针对各模块的功能要求和性能要求,重点设计导航接收模块、ARM定位解算模块、通信接口模块、加速度传感器模块。
2.1 导航接收模块
利用北斗星通公司三系统八频高精度OEM芯片,BDM683为原始资料接收板,完成了对导航信息的解码与处理,以满足多模多频导航接收模块的需要。BDM683板具有384个信道,初始化时间不超过10秒,BDM683板卡主要性能指标如下:
(1) 定位精度:单点平面为1.5mRMS、单点高程为3.0mRMS;
(2)观测精度(如表1所示):

表1 BDM683观测精度 单位:mm
本板是将接收器的前端硬件整合到大型电路中,通过TNC接口天线端GNSS RF信号输入到BDM683的接收板上,经过变频、放大、滤波等处理,实时解调,从而达到对GNSS信号捕获、跟踪、同步、解调的目的。
2.2 ARM定 位 解 算 模 块 摇摇摇摇摇摇摇
定位解算模块采用ARM结构,它是嵌入式系统的核心,也是计算控制的核心。 ARM位置和解算模块通过对BDM683解调后的卫星信号实时分析,得到经纬度、速度、时间等数据,并将其存入主机。 该方案需要选用具有内存管理单元和操作系统的ARM处理器, 综合考虑到GNSS系统的功能要求和性能要求, 选择了TI公司的AM3358作为主要控制芯片。ARM处理器是运行操作系统,它包括电源电路、复位电路、时钟电路。 AM3358是一款32位RISC的工业级处理器, 功耗较低。 AM3358具有高集成度的外设, 其性能得到了极大地提高,AM3358是Cortex-A8处理器中价格最低的一种,还可以大大减少电路的复杂程度和扩展成本。
2.3 加速度传感器模块
加速传感器采用芬兰VT1公司的SCA3060三轴加速传感器,SCA3060采用VTI的3D-MEMS电容式传感技术, 功耗小、负载大、稳定性好、外部电路简单,便于集成,在惯性导航、车辆报警、倾角测量、运动检测等领域得到了广泛应用。
SCA3060具有以下优点:
( 1)3.3V至3.6V的高电压电源;
( 2)16-SP1数字接口通讯;
( 3)功率较小,为3.3V;
( 4)提供150μA的电流;
( 5)具有动作探测功能,发送中断信号;
( 6)符合AEC-Q100标准的规格要求,采用业界领先的经验证的3D-MEMS技术。
2.4 无线通信模块
无线通讯模块是连接地面指挥中心和地面终端设备之间的一座桥梁,系统采用GPRS接口接入GPRS网络,与监控中心进行数据通信,实现远程监控和远程控制。在此方案中,我们选择了华为EM310系统,EM310是一个具有GSM/GPRS的双频网通讯系统,此模块工作稳定,内置TVS管,可有效地避免卡纸的产生。 在此基础上,将TCP/IP协议嵌入软件中,通过出线指令的控制,实现了应用软件的快速接入,从而降低了软件的开发难度,缩短了软件的开发周期。 EM310通信模块的主要性能指标( 如表2所示):

表2 EM310通信模块的主要性能指标
通过表2提到的无线通信模块, 为系统提供远程通讯功能。
3.自动监测系统关键技术原理
为提高自动化监测系统数据分析的准确性,在提高硬件设备的基础上,还需要融合先进的算法技术,在理论基础上实现提升。首先基于GNSS的边坡监测技术,受GNSS自身技术原理限制,数据存在一定的噪声,在自动化监测系统设计中,需增加滤波处理过程; 其次结合GNSS数据采取模糊物元理论对边坡的形变情况、类型进行划分,以实现对边坡稳定等级的判定。
3.1 数据噪声去除
针对露天边坡变形情况, 充分考虑到GNSS容易受到地面、建筑物、树木等因素的影响,在这种情况下会导致GNSSRTK高程测量的精度检测,出现一定的误差。 在误差处理中,采用卡尔曼滤波方程对数据降噪处理。卡尔曼滤波包括反映状态变化规律的状态空间模型和反映实际观测值和状态变化量的观测模型,通过卡尔曼滤波联系观测值和状态变化规律可得到最佳估值。 卡尔曼滤波是通过历史累计值、实际观测值推算而得到最佳估值。
3.2 边坡变形情况分析
露天边坡变形情况是一个较为复杂的系统,其形成机理具有多样性、模糊性以及非线性。经过综合分析,采用模糊物元理论进行监测,将事物名称记作N,将特征c的量值记作v,如式( 1)所示:

式( 1)中,M为事物的数量。
在监测过程中,各个特征的模糊量值相差较大,会给计算结果造成较大的困难, 为此优隶属度原则进行标准化处理,如式( 2)所示:
式( 2)中,umn为第mn个标准化后的模拟值;R′mn为标准化处理后的模糊物元。
在得到各个参数平方模糊物元之后,需要评价原则评价事物状态的优劣,如式( 3)所示:

式(3)中,wi为权重;Δji为衡量评价指标重要程度的参数。
经过上述过程, 得到各个因素相对重要性总的排序,对判据定量分析。 经过上述处理后,采用GNSS技术进行定位,如式( 4)所示:

式( 4)中,Izi、Ii分别为延迟参数;Ebi、Eir分别为传输过来的差分数据与发送的差分数据;fl为接收机误差参数。
经过上述过程实现定位,然后对稳定等级判定,将情况分为稳定、较稳定、较不稳定区、不稳定四个等级,以此完成露天边坡变形监测。
4.实验对比
为验证所提出的基于GNSS技术的露天边坡变形自动监测系统的有效性,进行实验分析,并将基于综合分析法的监测方法、PSO-ELM预测模型与所提出的监测系统对比,对比3个系统监测的准确性。
4.1 实验准备
监测对象(如图1所示):

图1 监测对象点
监测点深度以及埋设间距统计表( 如表3所示):

表3 各个监测点深度以及埋设间距统计 单位:m
( 1)观测前,预先采用GNSS获得实际的位移值,GNSS接收机在开始观测之前,需检验仪器是否能够稳定运行;
( 2)为提高观测的稳定性,将一个大时段分为2个小时段的模式, 并在中间重新启动一次仪器, 保证每次观测达到60min以上;
( 3)长期监测可以得到相当数量的原始监测资料,但并非所有资料都能用于边坡的预报, 某些资料存在一定的误差,必须予以剔除本文利用Matlab小波分析法对原始观测进行降噪处理;
( 4)由于样本的输入数据单位与量纲不同,而且某些输入量的绝对差异较大,因此很容易产生“ 过拟合”。 为了防止这一情况,在进行网络训练前,先将采样数据进行标准化,使得它们的数值都在[-1,1]以内。 标准化如式( 5)所示:

式( 5)中,x为原始的样本数据;xmin、xmax分别为样本中各个输入对应的最大和最小值。
( 5)经过多次测量,获得实际的监测数据。
4.2 监测结果分析
为验证本方法的可行性与准确性,将本方法与基于综合分析法的预测模型、PSO-ELM预测模型进行对比实验。
基于综合分析法的预测模型是在传统灰色模型融合BP神经网络模型上进行数据分析的预测模型[4]。
PSO-ELM预测模[5]是在传统极限学习机( ELM,Extreme Learing Machine)模型基础上融合了粒子群优化( PSO,Particle Swarm Optimization), 实现了对ELM模型的权重和阈值等参数的优化,被广泛应用在边坡变形预测中。
分别采用所研究的监测系统与上述两个预测模型对露天边坡变形监测,监测时长为一个月,各个监测点的结果( 如图2- 图5所示):
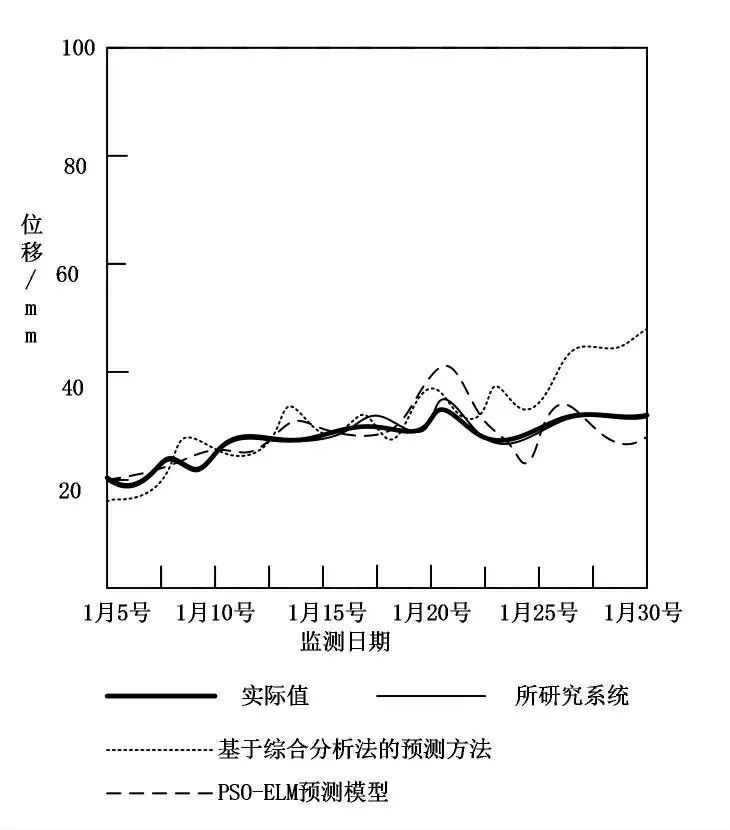
图2 测点1位移结果

图3 测点2位移结果

图4 测点3位移结果

图5 测点4位移结果
综合上述对比结果能够发现,所提出的露天边坡变形监测系统在这一个月的监测上,监测得到的结果与实际的位移值基本相同,相差较小。 基于综合分析法的预测方法与实际位移值相差较大,或多或少与实际值有一定差距,监测准确性不是很高;PSO-ELM预测模型得到的位移结果与实际结果差距也较大,较所提出的监测系统监测准确性低。
5.结束语
完成基于GNSS技术的露天边坡变形自动监测系统的研究,主要研究成果包含以下方面:
( 1)详细设计了系统硬件,保证系统安全稳定运行;
( 2)在系统软件部分,设计了变形监测数据处理方法,构建了预测模型,对于边坡变形监测有一定的指导意义;
( 3)设计实验,通过实验验证了所提出的监测系统在实际应用中,准确度较高。
本文所提出的监测系统虽然获得了较好的应用效果,但研究时间与研究条件有限,并未对以“ 年”为时间单位的观测数据进行长期实验分析,后续考虑将此方法用于不同地质类型的边坡监测工程中,并进行长期实验分析。 影响变形监测的因素有很多,为此在后续研究中,还需要重点研究影响因素,以进一步提高监测的效果。
